基于MIMO滑模的氣動(dòng)伺服系統(tǒng)控制
2024-01-03 06:35:50王瀟孔建壽
機(jī)械制造與自動(dòng)化 2023年6期
王瀟, 孔建壽
(1. 南京理工大學(xué) 自動(dòng)化學(xué)院,江蘇 南京 210094;2. 河北省農(nóng)業(yè)生產(chǎn)資料集團(tuán)有限公司,河北 石家莊 050041)
0 引言
氣動(dòng)伺服系統(tǒng)憑借安全可靠、構(gòu)造簡(jiǎn)單等優(yōu)點(diǎn),廣泛應(yīng)用于工業(yè)、農(nóng)業(yè)等自動(dòng)化領(lǐng)域[1-2]。但是由于空氣的可壓縮性、氣閥特性以及氣缸的摩擦等因素,使得氣動(dòng)伺服系統(tǒng)的非線性較高,從而給氣動(dòng)系統(tǒng)的精確控制帶來(lái)了較大的困難[3]。同時(shí),氣動(dòng)系統(tǒng)在工作中的一些外部擾動(dòng)也會(huì)對(duì)其跟蹤性能產(chǎn)生影響。因此,保證氣動(dòng)伺服系統(tǒng)跟蹤控制的性能,對(duì)于氣動(dòng)系統(tǒng)的安全穩(wěn)定運(yùn)行有著至關(guān)重要的作用。
針對(duì)氣動(dòng)系統(tǒng)的控制,國(guó)內(nèi)外學(xué)者已經(jīng)進(jìn)行了相關(guān)研究。SMAOUI等[4]對(duì)基于氣缸的伺服系統(tǒng)進(jìn)行了建模,并采用Backstepping算法實(shí)現(xiàn)了系統(tǒng)的位置控制,但是算法應(yīng)用依賴(lài)于較為精確的系統(tǒng)模型,抗干擾能力不足。許翔宇、林黃耀、劉凱等采用LM算法對(duì)氣動(dòng)系統(tǒng)的PID控制器參數(shù)進(jìn)行整定,以提高系統(tǒng)響應(yīng),降低系統(tǒng)震蕩,基于PID的策略同樣也有相關(guān)應(yīng)用[5-7]。雖然基于PID的方法不需要精確建模,但是系統(tǒng)的抗擾動(dòng)能力不足。為了提高氣動(dòng)系統(tǒng)的抗干擾能力,SHEN[8]采用滑模控制(sliding model control, SMC)策略,實(shí)現(xiàn)了氣動(dòng)伺服系統(tǒng)的高性能跟蹤控制。在滑模控制的基礎(chǔ)上,進(jìn)行算法的改進(jìn),同樣提高了氣動(dòng)系統(tǒng)的魯棒性[9]。其他基于自適應(yīng)控制以及自抗擾控制技術(shù)的氣動(dòng)系統(tǒng),同樣取得了較為出色的系統(tǒng)跟蹤控制能力[10-14]。
以上的氣動(dòng)伺服系統(tǒng)通過(guò)控制器的設(shè)計(jì)都實(shí)現(xiàn)了較為出色的跟蹤控制效果,但是系統(tǒng)主要進(jìn)行位置跟蹤,未對(duì)氣動(dòng)系統(tǒng)的柔順性進(jìn)行探討。由于氣體的可壓縮性,氣動(dòng)系統(tǒng)具有內(nèi)在柔順性。YI等[15]提出可以通過(guò)氣壓的調(diào)節(jié),實(shí)現(xiàn)氣動(dòng)系統(tǒng)輸出柔順性的整定。所以本文在進(jìn)行軌跡跟蹤的基礎(chǔ)上,進(jìn)行氣動(dòng)系統(tǒng)柔順性的控制,實(shí)現(xiàn)系統(tǒng)的多輸入多輸出(multiple input multiple output, MIMO)。
本文針對(duì)氣動(dòng)系統(tǒng)非線性的問(wèn)題,提出采用MIMO SMC算法實(shí)現(xiàn)氣動(dòng)伺服系統(tǒng)位置跟蹤和柔順性控制。首先對(duì)氣動(dòng)系統(tǒng)進(jìn)行基于流量控制策略的建模,然后將狀態(tài)空間轉(zhuǎn)換為嚴(yán)格反饋系統(tǒng)形式,在此基礎(chǔ)上進(jìn)行SMC控制器的推導(dǎo),最后通過(guò)仿真平臺(tái)對(duì)所提方法進(jìn)行驗(yàn)證。
1 氣動(dòng)系統(tǒng)動(dòng)力學(xué)模型
基于氣缸的氣動(dòng)伺服系統(tǒng)如圖1所示。其中,氣缸左右兩個(gè)氣腔獨(dú)立工作,單獨(dú)由兩個(gè)比例流量閥進(jìn)行控制。兩個(gè)氣腔內(nèi)的壓力共同作用于活塞上,壓力差作用下產(chǎn)生運(yùn)動(dòng)力。

圖1 氣動(dòng)伺服系統(tǒng)
該氣動(dòng)伺服系統(tǒng)的動(dòng)力學(xué)方程為
(1)
式中:M為傳動(dòng)傳輸桿上的總質(zhì)量;δ為活塞相對(duì)于平衡位置的距離,正向?yàn)閳D1中的右向;τext為外部驅(qū)動(dòng)力;P1和P2分別為左、右兩側(cè)氣腔內(nèi)壓力;Sa表示氣壓力的作用面積,即活塞的面積。由動(dòng)力學(xué)方程可知,對(duì)活塞的運(yùn)動(dòng)控制實(shí)際上是由左、右氣腔壓力的控制實(shí)現(xiàn)的。該驅(qū)動(dòng)過(guò)程通常是采用比例壓力閥,經(jīng)過(guò)直接調(diào)節(jié)內(nèi)腔壓力來(lái)實(shí)現(xiàn)。該驅(qū)動(dòng)策略簡(jiǎn)單直接,但是以壓力快速響應(yīng)為前提,忽略了內(nèi)腔壓力變化的過(guò)程以及系統(tǒng)的動(dòng)態(tài)效果。本文采取第二種驅(qū)動(dòng)方式,即流動(dòng)控制,通過(guò)比例流量閥調(diào)節(jié)進(jìn)入氣腔的氣流量,進(jìn)而實(shí)現(xiàn)對(duì)腔內(nèi)壓力的動(dòng)態(tài)跟蹤,這一過(guò)程的氣體動(dòng)力學(xué)描述為
(2)

(3)
本文是通過(guò)氣流量的調(diào)節(jié)實(shí)現(xiàn)對(duì)壓力的調(diào)節(jié),氣流量的調(diào)節(jié)過(guò)程為
(4)
式中:Ai表示比例流量閥的閥門(mén)開(kāi)度,即為模型系統(tǒng)的控制輸入,Ai=-1表示閥門(mén)全開(kāi)放氣,Ai=1表示閥門(mén)全開(kāi)充氣。所以Ai∈[-1,1];Λi(Pu,Pd)為最大流量,是由上游壓力Pu和下游壓力Pd決定的,具體計(jì)算公式如下:
(5)
式中:C為氣流常數(shù);ρ0為氣體密度;b為壓力系數(shù);T0為環(huán)境空氣溫度;Tu為氣源空氣溫度,一般兩個(gè)溫度取相同。當(dāng)充氣時(shí),上游壓力Pu為氣源壓力,下游壓力Pd為氣囊內(nèi)部壓力;放氣時(shí),上游壓力Pu為氣囊壓力,下游壓力Pd為環(huán)境氣壓力。
式(1)—式(5)描述了整個(gè)氣動(dòng)伺服系統(tǒng)的非線性動(dòng)力學(xué)模型。為了便于進(jìn)一步研究控制算法,將整體系統(tǒng)模型用狀態(tài)空間模型進(jìn)行描述。
(6)
(7)
(8)
結(jié)合式(6)—式(8),氣動(dòng)系統(tǒng)的非線性狀態(tài)空間模型描述為
(9)

(10)
(11)
對(duì)于系統(tǒng)輸出,除了進(jìn)行常規(guī)要求的軌跡跟蹤,本文還增加了用于描述柔順特性的輸出量,即(P1+P2)/2。根據(jù)動(dòng)力學(xué)方程可知,氣缸活塞的運(yùn)動(dòng)控制是通過(guò)(P1-P2)的壓力差實(shí)現(xiàn)的,而在保證壓力差的情況下,壓力P1和P2仍然可以自主調(diào)節(jié)。當(dāng)P1和P2整體值較低時(shí),氣體可壓縮性較高,活塞對(duì)外可表現(xiàn)出較低的剛度;反之,活塞對(duì)外可表現(xiàn)出較高的剛度。所以通過(guò)(P1+P2)/2的控制,可實(shí)現(xiàn)不同剛度表現(xiàn)。
最終構(gòu)建式(9)所描述的系統(tǒng)模型,可以看出,這是一個(gè)非線性雙輸入、雙輸出的系統(tǒng)。所以本文采用MIMO SMC來(lái)對(duì)氣動(dòng)系統(tǒng)進(jìn)行控制。
2 MIMO SMC算法
2.1 坐標(biāo)轉(zhuǎn)換
算法的研究在式(9)所描述的狀態(tài)空間模型上進(jìn)行,但是為了規(guī)范化推導(dǎo)過(guò)程,一般需要將狀態(tài)空間模型轉(zhuǎn)換為嚴(yán)格反饋的形式。所以本文進(jìn)一步使用Lie導(dǎo)數(shù)算子,對(duì)式(9)的模型進(jìn)行坐標(biāo)轉(zhuǎn)換,Lie導(dǎo)數(shù)的計(jì)算為:
(12)
(13)
(14)
由式(14)可推得
(15)

2.2 MIMO滑模控制
針對(duì)式(15)所描述的狀態(tài)空間模型,構(gòu)建針對(duì)軌跡和氣壓的兩個(gè)滑模面為
(16)

(17)
為了便于分析,將滑模面導(dǎo)數(shù)中的向量和矩陣用符號(hào)代替為:
(18)
(19)
(20)
在式(17)的滑模面導(dǎo)數(shù)基礎(chǔ)上,選用經(jīng)典的等速趨近率,構(gòu)造系統(tǒng)的輸入為
(21)
滿足k1>0和k2>0。由得到的系統(tǒng)輸入和滑模面,可計(jì)算得Lyapunov方程的導(dǎo)數(shù)
(22)
因此,針對(duì)非線性氣動(dòng)系統(tǒng),基于MIMO SMC得到的系統(tǒng)雙輸入能夠使得系統(tǒng)滿足軌跡跟蹤和基于平均壓力的柔順性控制需求。
3 仿真分析
3.1 系統(tǒng)參數(shù)和仿真平臺(tái)
在已經(jīng)建立的氣動(dòng)系統(tǒng)模型和MIMO SMC控制算法的基礎(chǔ)上,本文在Simulink環(huán)境下進(jìn)行仿真驗(yàn)證,為后續(xù)的應(yīng)用奠定基礎(chǔ)。其中為了模擬實(shí)際應(yīng)用中的驅(qū)動(dòng)物體實(shí)現(xiàn)往復(fù)運(yùn)動(dòng),仿真設(shè)定伺服系統(tǒng)驅(qū)動(dòng)質(zhì)量為2kg。建模過(guò)程中涉及的其他模型參數(shù)如表1所示。

表1 系統(tǒng)仿真參數(shù)
基于選定的參數(shù),建立如圖2所示的仿真模型。
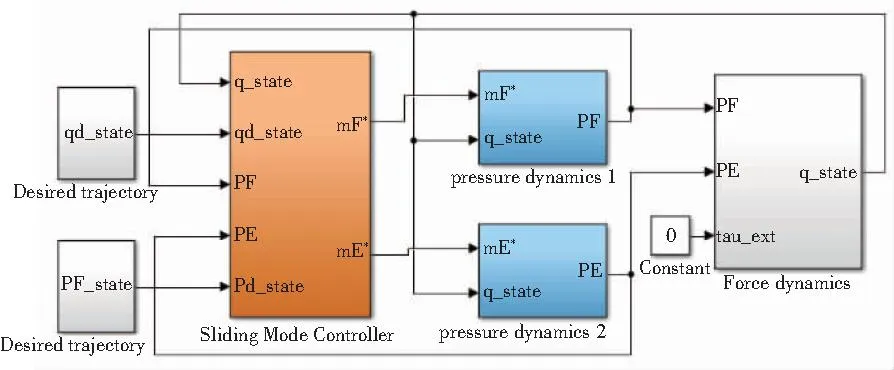
圖2 Simulink環(huán)境下的仿真模型
圖2中,分別給定期望軌跡和期望的用于柔順控制的壓力,經(jīng)過(guò)MIMO SMC模塊后,得到兩個(gè)比例流量閥的開(kāi)度,同時(shí)在此刻狀態(tài)下,進(jìn)一步計(jì)算得到輸入到兩個(gè)氣腔的流量。在輸入流量下,由氣壓動(dòng)力學(xué)計(jì)算的氣腔內(nèi)壓,進(jìn)而作用于活塞面,實(shí)現(xiàn)活塞桿的運(yùn)動(dòng)。
對(duì)于軌跡跟蹤,根據(jù)實(shí)際應(yīng)用中往復(fù)的運(yùn)動(dòng),以正弦信號(hào)為期望軌跡,具體給定幅值50mm,頻率1Hz和2Hz的正弦信號(hào)。其中,對(duì)于氣動(dòng)系統(tǒng),2Hz的正弦信號(hào)對(duì)于檢測(cè)系統(tǒng)性能具有重要意義。對(duì)于壓力,給定一個(gè)斜坡信號(hào)序列,以檢測(cè)系統(tǒng)在滿足軌跡跟蹤的同時(shí),還具有柔順性調(diào)控的性能。
3.2 仿真結(jié)果和分析
正弦信號(hào)的軌跡跟蹤結(jié)果如圖3和圖4所示。其中,虛線為期望軌跡,實(shí)線為實(shí)際跟蹤軌跡。從圖中的對(duì)比可以看出,本文提出的算法能夠使得氣動(dòng)系統(tǒng)準(zhǔn)確地跟蹤上期望信號(hào)。需要注意的是,仿真環(huán)境中的誤差相對(duì)于給定信號(hào)值數(shù)值較低,可以忽略。雖然仿真是比較理想的工作狀態(tài),但是本文仿真系統(tǒng)的參數(shù)都是根據(jù)實(shí)際工作系統(tǒng)設(shè)定的,且通過(guò)相關(guān)測(cè)定后給定,可以反映系統(tǒng)的真實(shí)性。

圖3 1Hz正弦信號(hào)跟蹤

圖4 2Hz正弦信號(hào)跟蹤
2Hz的信號(hào)對(duì)系統(tǒng)的響應(yīng)性能要求較高,從圖4可以看出,系統(tǒng)仍能夠穩(wěn)定跟蹤上2Hz正弦信號(hào),跟蹤效果并未下降。
在保證軌跡跟蹤性能的基礎(chǔ)上,同時(shí)保證平均壓力的控制,對(duì)于給定的壓力斜坡信號(hào),跟蹤效果如圖5所示。

圖5 壓力斜坡信號(hào)跟蹤
從圖5中可以看出,在初始50kPa穩(wěn)定均壓后,系統(tǒng)能夠以斜坡的形式升壓到100kPa并保持穩(wěn)定,在保證系統(tǒng)軌跡跟蹤效果的情況下,系統(tǒng)的剛度提升,柔順性降低。穩(wěn)定后,在6s時(shí),系統(tǒng)能夠?qū)ζ露雀蟮膲毫M(jìn)行控制;在7s時(shí),壓力進(jìn)一步升高到200kPa,此時(shí)系統(tǒng)達(dá)到一個(gè)較高的剛度,將會(huì)對(duì)外部位移干擾產(chǎn)生較高的恢復(fù)力。
根據(jù)軌跡跟蹤和壓力控制的仿真結(jié)果可以看出,本文所提算法能夠?qū)?gòu)建的氣動(dòng)伺服系統(tǒng)實(shí)現(xiàn)多輸入、多輸出的控制。
4 結(jié)語(yǔ)
本文在對(duì)非線性氣動(dòng)系統(tǒng)進(jìn)行完整建模的基礎(chǔ)上,采用MIMO SMC算法對(duì)系統(tǒng)軌跡跟蹤及柔順性進(jìn)行同時(shí)控制,最后在搭建的仿真平臺(tái)上對(duì)系統(tǒng)進(jìn)行了仿真分析,結(jié)果表明本文所提方法在保證軌跡跟蹤效果的同時(shí),也實(shí)現(xiàn)了系統(tǒng)柔順性的壓力控制。整體工作為后續(xù)的應(yīng)用奠定了基礎(chǔ)。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
