
輪式變徑管道機器人結構分析及控制系統設計
2024-01-03 16:02:14盧丙舉吳友生
艦船科學技術 2023年22期
關鍵詞:分析
劉 東,羅 亮,盧丙舉,吳友生
(1. 中國船舶集團有限公司第七一三研究所,河南 鄭州 450015;2. 河南省水下智能裝備重點實驗室,河南 鄭州 450015)
0 引 言
由于空間狹小,當前對導彈發射試驗筒內部管道的監測主要還是依賴人工目測,由于管道深度大、光線暗,造成人工檢測困難,給管道的維護和保養帶來難度。為更加客觀掌握管道內部狀態[1],保證設備運行的可靠性,需要對試驗筒內部的管道狀態進行全面的檢查和勘驗。
國外從20 世紀40 年代開始研究,90 年代初得到迅猛的發展,并研制了許多實驗樣機。韓國延世大學[2]研制了履帶式管道機器人PAROYS-II,適用于400~700 mm 的管道,可通過彎管和錐形管。日本立命館大學[3-4]研發了一種支撐輪式管道內機器人,該機器人采用一種不完全驅動的平行四邊形驅動機構,在遇到管內障礙時,履帶可從普通形狀轉變為平行四邊形形狀,提高了機器人的拖纜能力。韓國成均館大學[5]研發了MRINSPECT 系列管道機器人,其中MRINSPECT VII 為最新的一代,該機器人基于多軸差速齒輪機構,通過機械調節主動車輪的速度而無需任何控制工作,以適應如直管或彎管等管道環境。國內對管道機器人的研究始于20 世紀60 年代,鄧宗全等[6]研制了一種六獨立輪式管內檢測牽引機器人,唐德威等[7]研制了一種三軸差動式管道機器人,該機器人在水平直管、彎管及障礙管道的通過性較好,適用于直徑為310 mm左右的管道,三軸差動式管道機器人整體只有一個電機,電機通過三軸差速機構實現全驅動。馮敬之[8]1996年研制出輪式驅動排水管道自動清淤機器人。
國內外針對狹窄空間的管道機器人研究較少,缺乏簡單有效的結構設計,針對該問題,本文設計一種能夠可用于狹小間隙內的輪式自適應變徑管道機器人裝置,使得管道機器人可在65~90 mm 的管內自主行走,實現了對狹小變徑管道的適應性。同時,對管道機器人驅動裝置運行機理和力學特性、牽引能力以及彎管通過性進行分析。此外,配套的便攜式手持視頻顯控平臺可實時展現回傳的視頻畫面,使工作人員對空調管內的狀態進行實時診斷并對管道機器人進行反饋操作[9]。
1 管道機器人運動特性分析
1.1 管道機器人工作原理
本文所設計的管道機器人可適應65~90 mm 范圍變化的管道。機器人主要由伸縮機架、擺臂、支撐桿和驅動輪組成,如圖1 所示。6 個驅動輪按前向、后向2 組相向布置,每組驅動輪在圓周方向上均勻分布。驅動電機選用微型直流行星減速電機,具有效率高、速度穩定、調速范圍廣等特點,在行星齒輪內孔配置有滾針軸承,可有效提高負載能力與壽命。管道內行進時,6 組驅動電機分別通過齒輪傳動機構帶動驅動輪轉動,使6 組動力機構協同工作,依靠驅動輪與管壁間的摩擦力使管道機器人按照期望速度移動[10]。
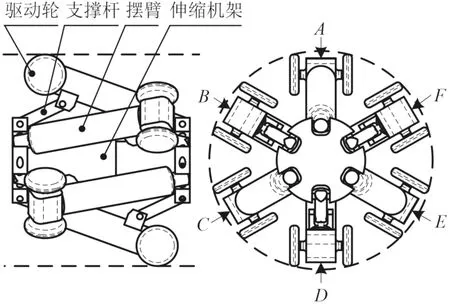
圖1 行走裝置結構Fig. 1 The structure of walking device
機器人在管道內行走時,拉伸彈簧處于變形狀態,為驅動輪和管壁間提供正壓力,驅動輪依靠這個壓力產生的摩擦力實現爬升運動以及機體支撐[11]。當行走裝置行進至管徑收縮部位,因為驅動輪緊貼管壁運動,會使擺臂向管徑中心方向收縮,使伸縮機架伸長,以適應管徑變化。當通過管徑收縮部位后,在拉伸彈簧作用下,伸縮機架縮短,擺臂向管壁方向擴展,保證驅動輪與管壁之間時刻壓緊。通過伸縮機架實現行走裝置半徑方向上的調整,提高了行走裝置的通用性[12]。
1.2 行走機構力學特性分析
對機器人在管道中行走時的受力情況進行分析,為便于分析,將每一組驅動輪簡化為中間對稱面上的當量驅動輪。以單個驅動輪為分析對象,受力情況如圖2 所示。
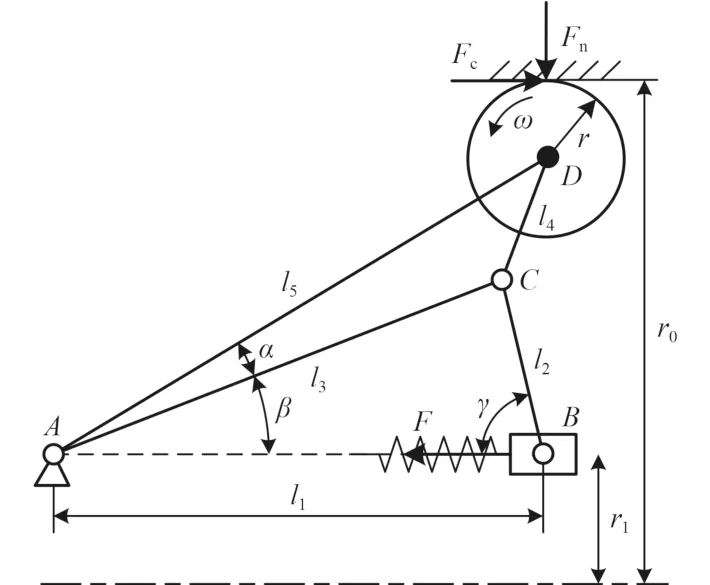
圖2 驅動輪受力情況分析Fig. 2 Analysis of force on the driving wheel
驅動輪在伸縮機架內部彈簧力的作用下,壓緊在管道內壁上。機器人在內徑為r0的管道內行走時,機器人本體的固定參考鉸接點A與移動鉸接點B間的距離l1為:
式中:l2為鉸接點B與鉸接點C間距離,m;I3為鉸接點A與鉸接點C間距離,m; β為擺臂與伸縮機架間夾角,,rad;r1為鉸接點A與鉸接點B的偏心距, m ; α 為擺臂內部夾角,,rad; γ 為支撐桿與伸縮機架間夾角,,rad。
伸縮機架內調整彈簧的伸長量 Δx為:
式中:x0為調整彈簧的初始長度,m。
對于彈簧被拉伸時,支撐圓盤所收到的軸向拉力F可以表示為:
鉸點C受到支撐圓盤的作用力為:
分析以鉸點A的受力情況,建立其力矩矩平衡方程為:
管道內壁對驅動輪的正壓力可表示為:
式中:Fc為驅動輪與管道內壁間摩擦力,N;l5為鉸接點A與鉸接點D間距離,m;r1為管道內壁半徑,m;r為驅動輪半徑,m。
當驅動輪與管壁之間為純滾動而不發生相對位移時,縱向驅動力Fc與管壁的法向支反力Fn滿足關系式為:
式中, μφ為橡膠驅動輪的附著系數。
根據式(6)與式(7),得到驅動輪與管壁不產生相對滑動時,管壁的極限法向支反力Fn為:
再由式(7)與式(8)可推出驅動輪的最大驅動力表示為:
根據上述分析結果,繪制機器人的長度(鉸接點A與鉸接點B間距離)、單個驅動輪的最大牽引力與管道直徑間的關系曲線,如圖3 所示。分析結果表明,隨管道直徑逐漸增大,機器人的長度逐漸減小,而單個驅動輪的最大牽引力先逐漸增大,后快速增大。

圖3 管道直徑對機器人長度與單個驅動輪最大牽引力的影響Fig. 3 The influence of pipe diameter on robot length and maximum traction force of a single drive wheel
2 行走性能分析
2.1 過彎管時行走姿態分析
彎管是管道機器人在管道內行走時經常遇到的一種工況,也是考量管道機器人行走性能指標的一個重要參考[13]。忽略管道機器人零部件的加工誤差與裝配誤差因素,假設管道機器人在直管內行走時,前、后2 組驅動輪與管道內壁均勻接觸,各接觸點的接觸狀態與接觸力均相同。而在彎管內行走時,如圖4 所示,各接觸點處彎管內壁曲率不同,導致接觸狀態均不相同。以a1b1與a2b2分別表示前、后2 組驅動輪與管道內壁接觸點形成的理論截面。
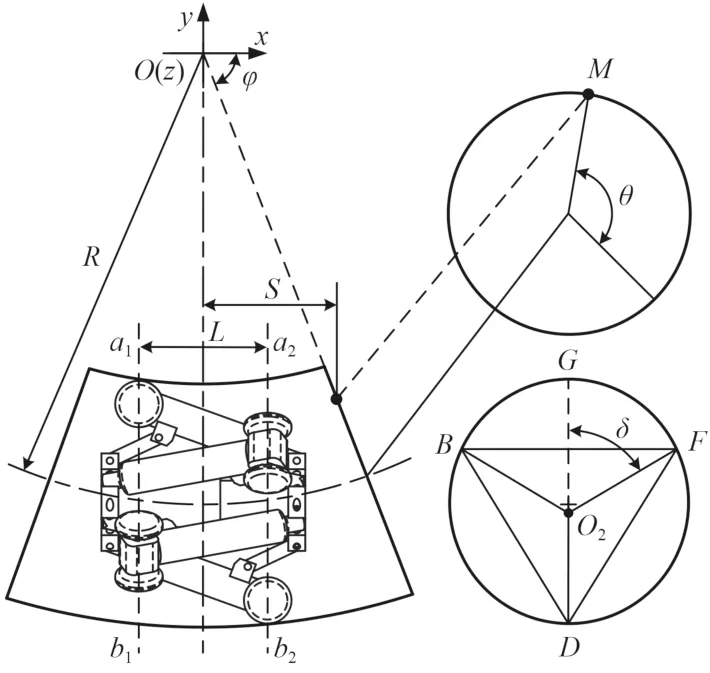
圖4 彎管內行走分析Fig. 4 Analysis of walking in elbow
管道內壁任一輪壁接觸點M的運動軌跡可表示為:
式中:R為管道彎曲半徑,m;S為接觸點M到彎管中心面的距離,m。
得到管道內壁的旋轉曲面方程為:
由右側3 個驅動支腿B、D、F與管道內壁接觸點確定的非圓截面a2b2方程為:
截面a2b2處3 個驅動支腿與管道內壁接觸點組成等邊三角形△BDF,存在:
頂部接觸點的位移頂點為:
接觸點F的姿態角δ為:
2.2 管內運動分析
管道機器人的牽引力由管道內壁與驅動輪間的摩擦力提供。最大牽引力取決于驅動輪與內壁間的正壓力與摩擦系數。以整個機器人主體為研究對象,將各個驅動輪所產生的縱向驅動力求和,可得管道機器人能達到的最大總牽引力為:
對管道機器人在直管中的運動過程進行分析,機器人沿直管上升時運動方程為:
式中:m為管道機器人質量,kg;a為管道機器人加速度,m/s2;TO為電機驅動力矩,Nm; η為傳動機構效率;i為傳動機構減速比; μd為驅動輪與管壁間滾動摩擦系數; ?為管道傾角,rad。
機器人沿直管下降時的運動方程為:
2.3 越障能力分析
輪式變徑管道機器人利用六輪獨立驅動方式與伸縮機架適應管道適應管徑變化,是保持足夠牽引力與可靠接觸的前提,對機器人在管道內的越障能力尤為重要。圖5 為機器人過凸起障礙時的力學分析模型。驅動輪越障瞬間,且輪與障礙間無相對滑動時,應有:
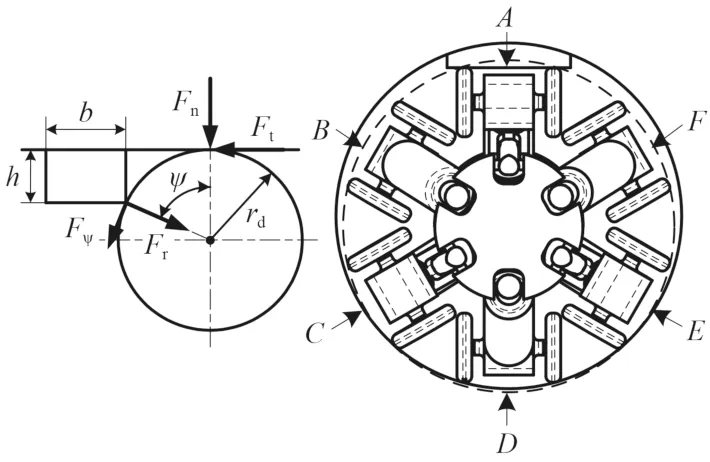
圖5 管道機器人越障分析Fig. 5 Obstacle analysis of the pipeline robot
機器人越障時的總牽引力F0為:
3 控制系統設計
3.1 管道機器人控制系統原理
管道機器人控制系統工作原理如圖6 所示。便攜式顯控平臺通過多功能數據采集卡發出行走裝置行走指令[14],行走裝置電機驅動器接收到控制指令后控制伺服電機轉動,使行走裝置在60~90 mm 管徑內自主行走。行走裝置上安裝有位姿傳感器及高清紅外攝像機,實時檢測行走狀態與管內狀態,并將采集得到的傳感信息與視頻狀態信息實時回傳至便攜式可移動顯控平臺工控主板,經多功能數據采集卡與視頻采集卡轉碼處理后顯示在高清液晶顯示屏上。

圖6 控制系統原理圖Fig. 6 The structure diagram of control system for the pipeline robot
3.2 控制系統硬件組成
根據設計要求,手持式顯控平臺的主要功能是裝載管道機器人系統的上位機系統,實時顯示并儲存行走裝置回傳的視頻數據、發送出行走裝置的控制指令。此外,還需實現電源管理模塊的充放電功能。工控主板模塊的外設接口有以太網接口、USB 接口、視頻AV 端子接口、COM 接口、充放電接口等。硬件接口連接方式設計如圖7 所示。上位機操作主界面主要由5 個部分所組成:標題欄、工具欄、操作區、視頻窗口和狀態欄。
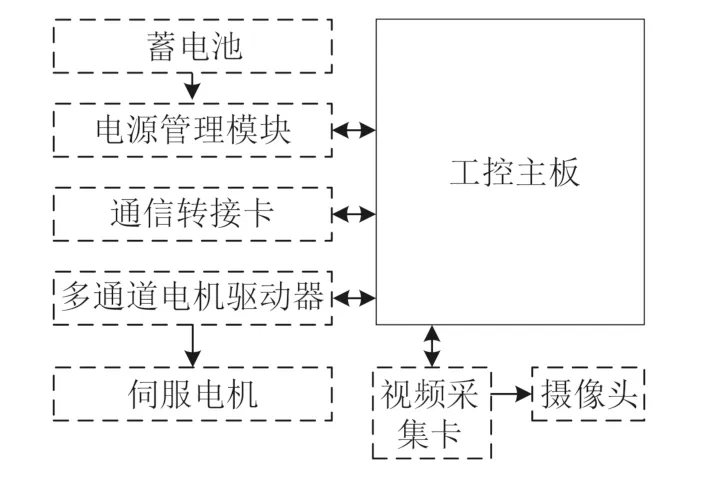
圖7 控制系統硬件組成圖Fig. 7 Hardware composition diagram for the control system
4 試驗驗證
4.1 管道行走試驗
在直徑變化范圍為60~200 mm 的垂直管道內開展管道機器人在變徑管道中的行走試驗,測試管道機器人在不同直徑管道內的移動速度與最大牽引力,試驗結果如圖8 所示。
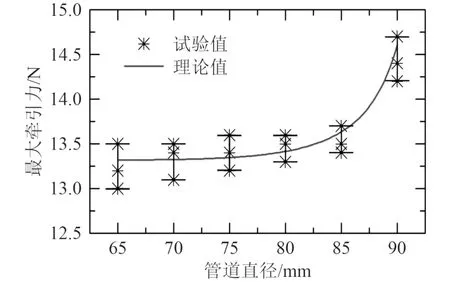
圖8 變徑管道中行走試驗數據Fig. 8 Experimental data of walking test in variable diameter pipeline
試驗結果表明,管道機器人能夠在不同管徑的管道中保持支撐腿與管道內壁之間良好的接觸狀態。在直徑為60 mm 管道內行走時,移動速度為2.64 m/min,最大牽引力為37.3 N;隨管道直徑增大,機器人的移動速度逐漸增大,最大牽引力逐漸減小。
4.2 管道裂紋識別試驗
分別采用YOLO v3、YOLO-輔助、YOLO-GIoU、YOLO-AUX 這4 種算法對樣本容量為600 的管道內壁損傷數據集開展識別試驗,識別結果如表1 所示。結果表明,優化后的YOLO v3-AUX 算法的準確率提高了4.8%,漏檢率和錯檢率分別降低了2.8% 和2.9%,提升了檢測的魯棒性。
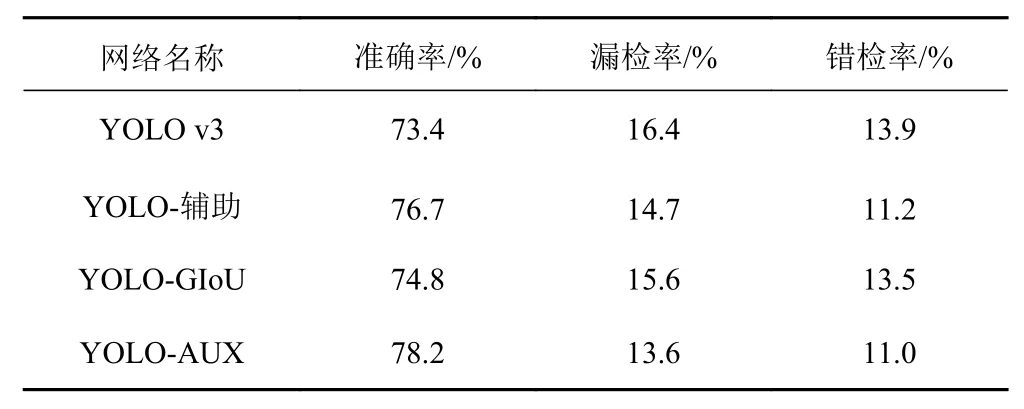
表1 管道內壁損傷識別結果Tab. 1 Identification results of the pipeline inner wall damage
5 結 語
1)管道機器人采用直流無刷電機與行星減速器的驅動,結構緊湊,對稱分散布置,有效減小了機器人本體尺寸,同時可快速進行前進與后退的轉換。
2)采用六輪獨立驅動與主動式伸縮機架形式,改善了在直管與彎管內的附著與驅動性能,在保證一定的牽引能力和過彎能力的前提下,有效提升管道機器人對管徑變化與彎管的適應能力,擴展了管道機器人的應用場景。
3)在設計管道機器人控制系統的前提下,進行了垂直管道行走試驗,測試了機器人在不同管徑中的最大速度與最大牽引力。分別采用4 種識別算法對管壁損傷情況進行了檢測,結果表明優化后的YOLO v3-AUX 網絡算法的檢測準確率較高。
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
財經界(學術版)(2015年20期)2015-12-23 09:20:13
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
