基于作業(yè)任務(wù)的智能船舶性能測試場景規(guī)劃
2024-01-03 16:02:22張琳丹
艦船科學(xué)技術(shù) 2023年22期
張琳丹,倪 天,朱 忠,李 龍
(1. 中國船舶科學(xué)研究中心, 江蘇 無錫 214082;2. 深海技術(shù)科學(xué)太湖實驗室, 江蘇 無錫 214082;3. 上海交通大學(xué) 船舶海洋與建筑工程學(xué)院, 上海 200240)
0 引 言
傳統(tǒng)船舶性能測試主要包括虛擬仿真、模型實驗及實船試驗3 種類型,其中模型實驗又涉及水池驗證和外場驗證[1]。近年來隨著數(shù)字孿生技術(shù)的引入,虛擬仿真與模型實驗相結(jié)合的智能船舶性能測試模式具備經(jīng)濟、高效等優(yōu)勢[2-3],越來越受到關(guān)注。
無論傳統(tǒng)測試模式還是虛實結(jié)合測試模式,智能船舶性能測試都離不開以作業(yè)任務(wù)為導(dǎo)向的典型工況和測試場景規(guī)劃[4]。
本文圍繞自主感知、自主避障等智能船舶的核心功能測試展開,并利用虛擬仿真實驗與水池模型實驗相結(jié)合的方式,針對典型作業(yè)任務(wù)需求進行智能船舶功能分解,提出一種基于作業(yè)任務(wù)的智能船舶性能測試場景規(guī)劃。
1 智能船舶應(yīng)用需求
1.1 海洋科學(xué)調(diào)查
海洋科考是傳統(tǒng)海洋裝備的重點應(yīng)用領(lǐng)域之一,傳統(tǒng)海洋科學(xué)調(diào)查船受限于人力、物力和時間的影響,難以取得連續(xù)的長周期大范圍海洋調(diào)查數(shù)據(jù),而智能船舶在無人自動化執(zhí)行作業(yè)任務(wù)擁有著優(yōu)勢,未來海洋科考領(lǐng)域?qū)χ悄艽暗膽?yīng)用需求會愈發(fā)增多。
對智能船舶來講,在傳統(tǒng)海洋科考船適用的作業(yè)任務(wù)之中,除了必須有科學(xué)家隨船的原位觀測與實驗以外,海洋環(huán)境探測與儀器投放回收都能由智能船舶按照預(yù)先制定的任務(wù)流程進行自主作業(yè)。
1.2 海洋考古搜尋
海洋考古主要涉及調(diào)查、發(fā)掘和研究我國古代從事海洋活動的文化遺存,目前已有將智能船舶投入水下考古領(lǐng)域進行有人無人協(xié)同考古作業(yè)的實踐[5]。
從學(xué)科分類的角度來說,航海考古是海洋考古的核心領(lǐng)域,而船舶考古與海港考古構(gòu)成航海考古的2 個主要方面[6]。因此,海上考古任務(wù)主要指搜尋發(fā)現(xiàn)海中的古代沉船和淹沒于水下的古代港口、碼頭等泊船設(shè)施遺跡,不僅包括沉船船體本身的遺存,還需要搜尋、發(fā)掘埋藏于水下或海底沉積物下各類船舶實物及相關(guān)遺存。
從考古調(diào)查的作業(yè)流程來說,水下考古通常首先根據(jù)史料分析劃定文化遺存可能存在的區(qū)域,再派遣水下考古調(diào)查船前往該海域采用多種探測手段結(jié)合潛水探摸等對該區(qū)域進行精細化調(diào)查。
總體上看,在傳統(tǒng)海洋考古調(diào)查作業(yè)任務(wù)中,遺跡搜尋和目標(biāo)識別等任務(wù)都能由智能船舶按照事先規(guī)劃進行自主作業(yè)。發(fā)現(xiàn)目標(biāo)后,再由潛水員進行水下探摸,以降低海上作業(yè)成本并提高效率。
1.3 作業(yè)任務(wù)分解
智能船舶的各項性能技術(shù)指標(biāo)可分為定量指標(biāo)和定性指標(biāo)[7],其中定量指標(biāo)指含有具體數(shù)據(jù)的指標(biāo),如智能巡航時智能船舶可達到的最大航速等;定性指標(biāo)則通常具有一定的模糊特征,無法直接進行定量描述,如智能船舶執(zhí)行智能探測任務(wù)時的抗干擾、避障、識別能力等。
為了更全面、客觀地對執(zhí)行特定作業(yè)任務(wù)時智能船舶的綜合性能進行評價,首先采用解析法從海洋科學(xué)調(diào)查與海洋考古搜尋的應(yīng)用需求出發(fā)對典型作業(yè)任務(wù)進行分解。如圖1 所示,從中提取出涉及具體任務(wù)的智能船舶5 大核心功能:機動避障、高速巡航、目標(biāo)搜尋、目標(biāo)識別和目標(biāo)定位。其中,機動避障與高速巡航主要涉及智能船舶的航行性能,目標(biāo)搜尋、目標(biāo)識別和目標(biāo)定位,可以概括為智能船舶的探測性能。
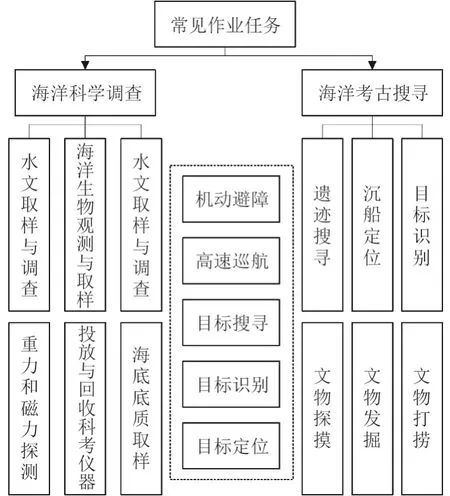
圖1 常見作業(yè)任務(wù)分解Fig. 1 Scheme of common tasks
2 典型作業(yè)任務(wù)測試場景規(guī)劃
在智能船舶應(yīng)用需求分析的基礎(chǔ)上,圍繞航行與探測兩類典型作業(yè)任務(wù)對智能船舶的性能測試場景進行規(guī)劃。
2.1 智能航行測試
2.1.1 航行任務(wù)分解
智能航行是智能船舶核心功能的體現(xiàn),是智能船舶性能測試驗證首先要面向的對象[4]。對于海洋科學(xué)調(diào)查智能船來說,實際可能需要面對如遷徙魚群、海底暗礁、海洋浮標(biāo)等多種海洋地形地貌環(huán)境,其機動避障能力不可或缺。而海洋考古智能船相對來說可能需要在更廣闊的海域?qū)σ伤坪5走z存進行搜尋作業(yè),考慮到電池能源動力等因素,在自主避障的基礎(chǔ)上還需關(guān)注智能船舶的高速巡航性能[8]。
2.1.2 機動避障測試
在涉及機動避障的作業(yè)任務(wù)測試場景規(guī)劃中,遷徙魚群、海草海藻、海底暗礁、海洋浮標(biāo)等障礙干擾物可模型簡化為動態(tài)干擾物、懸浮干擾物和固定障礙物。
要求參試無人船縮比模型在一定時間內(nèi)駛過設(shè)有若干模擬水下典型障礙物的水池測試區(qū)域,參試無人船模型在完成任務(wù)時不得觸碰障礙物,檢驗參試無人船模型對常見海洋干擾環(huán)境的避障機動能力。
障礙物示例如圖2 所示。
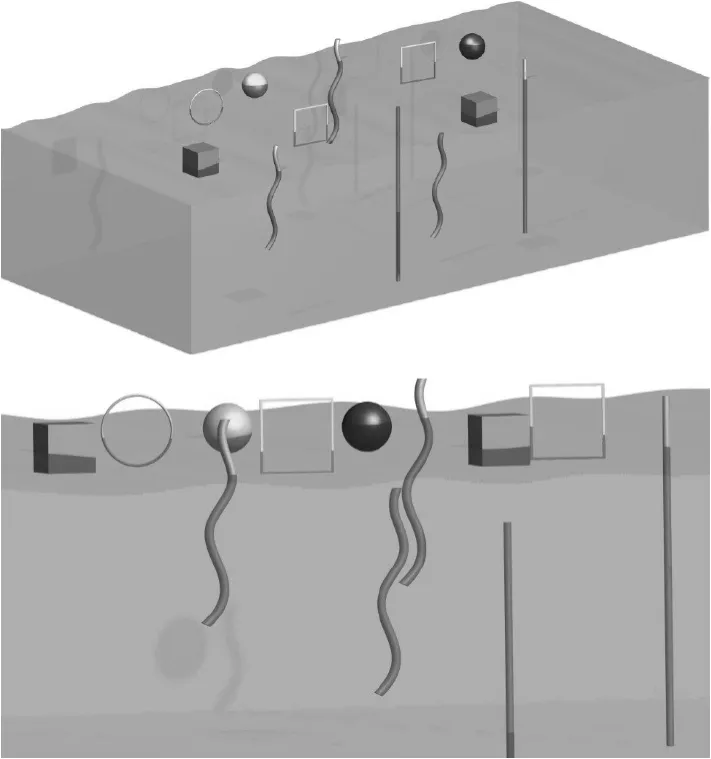
圖2 機動避障測試場景設(shè)計Fig. 2 Scenario planning for mobility test
在測試中,參試無人船模型須穿過位于水池底部一定高度與寬度的彩色門框,門框前一定距離處分別設(shè)有模擬水草、纜繩等物體的若干彩色懸浮障礙物。無人船模型在完成穿過門框任務(wù)時,不得觸碰障礙物。該項試驗?zāi)康脑谟跈z驗無人船模型在特定海流條件下的航行機動性能。此外, 與傳統(tǒng)的固定障礙物避障測試相比,在設(shè)置的若干彩色懸浮障礙物中,底部固定的若干長度飄帶狀障礙物受水池中模擬水流環(huán)境影響存在一定范圍的前后飄動,可通過模擬真實海洋環(huán)境中存在的可能對無人船模型產(chǎn)生纏繞的水草、懸浮繩索等障礙物,檢驗無人船模型抗干擾機動性能。參試無人船模型穿過門框的狀態(tài)記為Si,與 動態(tài)或懸浮干擾物的接觸狀態(tài)記為Pi,與 固定障礙物的接觸狀態(tài)記為Qi,得 到機動避障測試結(jié)果矩陣如下:
式中:s,p,q分別為穿過門框、避開動態(tài)懸浮物、避開固定障礙物3 類機動避障任務(wù)的權(quán)重系數(shù)。
2.1.3 高速巡航測試
記錄在不同海況條件下,參試無人船模型加速到一定航速所用時間,要求參試無人船模型在保持最大航速的情況下行駛1 min,繞固定目標(biāo)物進行j次連續(xù)轉(zhuǎn)彎,記錄轉(zhuǎn)彎半徑r、轉(zhuǎn)彎橫傾角θ及用時t等變量,得到高速巡航測試結(jié)果Bj,檢驗參試無人船模型快速機動性能。
2.2 智能探測測試
2.2.1 探測任務(wù)分解
無論是海洋環(huán)境調(diào)查,還是海底遺跡調(diào)查,海洋科考和海洋考古作業(yè)任務(wù)的核心都在于“調(diào)查”,從功能的角度來講即“探測”。智能船舶的探測能力按任務(wù)內(nèi)容可分解為:識別特定目標(biāo)物能力、搜尋動態(tài)目標(biāo)物能力和定位固定(通常為沉底的)目標(biāo)物能力。
2.2.2 目標(biāo)搜尋測試
參試智能船模型須在不同海況條件下,從設(shè)于水池中不同高度的若干相似物體中,搜尋并鎖定指定目標(biāo)物。檢驗參試智能船模型在特定能見度條件下,對潛標(biāo)浮標(biāo)類懸浮目標(biāo)物的機動搜尋及識別能力。
目標(biāo)示例如圖3 所示。
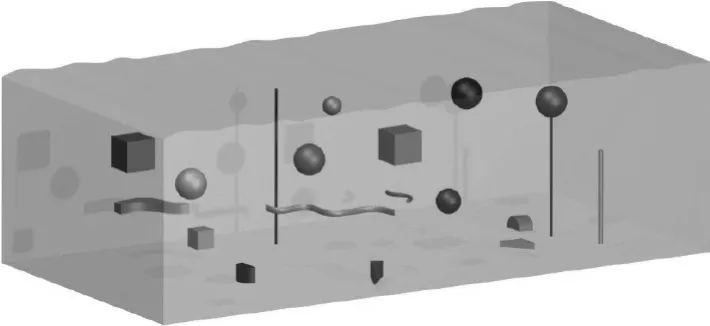
圖3 目標(biāo)搜尋測試場景規(guī)劃示意圖Fig. 3 Scenario planning for target searching test
參試智能船對懸浮目標(biāo)第k次探測結(jié)果Ck按狀態(tài)分別記為成功發(fā)現(xiàn)f、錯認(rèn)目標(biāo)w、未發(fā)現(xiàn)目標(biāo)m,從而得到目標(biāo)搜尋測試結(jié)果矩陣C。
2.2.3 目標(biāo)識別測試
考慮到目標(biāo)樣本庫數(shù)據(jù)類型多樣、數(shù)據(jù)量較大,模型或?qū)嵈瑴y試的可行性較差,故該項測試?yán)锰摂M仿真試驗平臺進行。
要求參試智能船的數(shù)字孿生仿真模型從測試主辦方準(zhǔn)備的真實目標(biāo)樣本圖片庫中識別出若干指定目標(biāo)(不同狀態(tài)下的沉船、接駁盒、浮標(biāo)、潛標(biāo)等常見水下儀器設(shè)備)并檢測出其位置,主辦方提供訓(xùn)練庫,測試時采用從訓(xùn)練庫中隨機抽取100 個目標(biāo)構(gòu)成測試庫,檢驗參試智能船模型對各類常見目標(biāo)物的靜態(tài)識別能力。目標(biāo)識別成功每個計1 分,不成功不計分。最終得分記為D。
2.2.4 目標(biāo)定位測試
參試智能船模型在執(zhí)行高速巡航測試的同時,須從水池底部裝有不同形狀物體的容器(用于模擬掩埋或局部泥沙環(huán)境,如試驗水池可以滿足將目標(biāo)物固定或掩埋在池底的保障條件,則無需容器)中,識別出特定形狀的目標(biāo)物。檢驗參試智能船模型高速航行狀態(tài)下,對海底掩埋目標(biāo)物的探測識別及定位能力。
目標(biāo)示例如圖4 所示。

圖4 沉底目標(biāo)示意圖Fig. 4 Examples of sunken targets
參試智能船對沉底目標(biāo)第n次探測結(jié)果En按狀態(tài)分別記為成功發(fā)現(xiàn)f、錯認(rèn)目標(biāo)w、未發(fā)現(xiàn)目標(biāo)m,整理得到目標(biāo)搜尋測試結(jié)果矩陣E。
3 智能船舶綜合性能評價
參考現(xiàn)行的傳統(tǒng)船舶性能評價標(biāo)準(zhǔn),基于智能航行與智能探測性能測試場景規(guī)劃,將層次分析與模糊綜合評判方法相結(jié)合,對參試智能船舶的航行與探測性能進行綜合評價。
3.1 綜合測試場景設(shè)計
綜合測試場地設(shè)置如圖5 所示。參試智能船模型示例運動路線在圖中以箭頭表示。試驗水池區(qū)域劃分為起始區(qū)、1 號機動避障測試區(qū)域、2 號懸浮目標(biāo)搜尋測試區(qū)域、3 號沉底目標(biāo)定位測試區(qū)域和終點區(qū),預(yù)設(shè)一定的海況條件。記錄參試智能船模型的n次測試結(jié)果Xn。

圖5 測試場地示意圖Fig. 5 Diagram of test field
綜合測試流程規(guī)劃如下:
步驟1測試前,參試智能船模型在起始區(qū)應(yīng)完成所有調(diào)試準(zhǔn)備工作,從起始點出發(fā)開始比賽后不得遙控操作,不得進行人工干預(yù)。測試前可進行練習(xí)。
步驟2發(fā)出起止信號后,參試智能船模型最前端離開起始線、進入1 號區(qū)域開始計時,參試智能船模型最前端離開3 號區(qū)域、接觸終點線為止。
3.2 航行探測性能綜合評價
現(xiàn)有智能船舶綜合性能評價方法以系統(tǒng)分層解析和專家打分為主[9]。系統(tǒng)分層解析法從設(shè)備出發(fā),但在針對實際任務(wù)的評價上不夠全面;專家打分法結(jié)合設(shè)計及應(yīng)用等領(lǐng)域內(nèi)專家的意見,但評價較為主觀。基于作業(yè)任務(wù)的智能船舶性能評價通過將實際任務(wù)測試場景自動化記錄的客觀結(jié)果與專家的主觀測評結(jié)合,再依據(jù)不同智能船舶用戶對各項任務(wù)的需求,利用統(tǒng)計學(xué)方法加以數(shù)據(jù)分析。最終確定該智能船舶面向任務(wù)的航行探測性能綜合得分,“影像記錄+數(shù)據(jù)分析+專家打分”的綜合評價:
式中:α、β、σ、δ和ε依次為用戶對各項測試任務(wù)重要性進行打分后,整理得到的單項測試權(quán)重系數(shù)。
4 結(jié) 語
本文針對帶有模糊特征的智能船舶航行與探測性能指標(biāo),基于常見海洋科考和海洋考古作業(yè)任務(wù),提出一種較為客觀量化的性能測試場景規(guī)劃及性能評估方法。通過對智能船舶在各項試驗任務(wù)中的得分進行計算,得到該智能船舶在抗干擾機動性、靜態(tài)避障率、動態(tài)避障率、水下懸浮物識別率、沉底目標(biāo)物識別率、半掩埋目標(biāo)物識別率和掩埋目標(biāo)物識別率等智能航行與智能探測等性能的量化評價。在服務(wù)于海洋科考與海洋考古等作業(yè)任務(wù)的智能船舶設(shè)計與研制階段,實施圍繞作業(yè)任務(wù)的智能航行和智能探測等能力的綜合量化評價,能夠預(yù)測和評價智能船舶系統(tǒng)的實際作業(yè)能力,也可為今后智能船舶裝備技術(shù)的改進升級和作業(yè)方案優(yōu)化提供基礎(chǔ)。
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
故事大王(2016年7期)2016-09-22 17:30:08
兒童故事畫報(2013年3期)2013-06-24 05:40:30
