基于目標(biāo)工件點(diǎn)云的位姿估計(jì)方法研究
2024-01-05 07:21:08閆厚任孔德杰郭飛張科航譚文
關(guān)鍵詞:特征
閆厚任,孔德杰,郭飛,張科航,譚文
(長春理工大學(xué) 光電工程學(xué)院,長春 130022)
近年來,機(jī)器人在制造領(lǐng)域各個(gè)環(huán)節(jié)的應(yīng)用越來越廣泛。為了提高機(jī)器人在應(yīng)用中的生產(chǎn)效率,滿足機(jī)械臂柔性裝配等方面的需求,通過對任意位姿的目標(biāo)工件進(jìn)行三維重建,獲取工件在空間中的位姿信息,再將該信息傳遞至機(jī)器人來實(shí)現(xiàn)機(jī)械臂對工件的準(zhǔn)確抓取,從而提升工業(yè)生產(chǎn)的效率。 目前,應(yīng)用最廣泛的點(diǎn)云配準(zhǔn)算法是迭代最近點(diǎn)算法ICP,但傳統(tǒng)的ICP算法收斂速度較慢,且在點(diǎn)云數(shù)據(jù)集初始位置相差較大時(shí),容易陷入局部最優(yōu)解,為了改善這一問題,本文給出一種改進(jìn)的點(diǎn)云配準(zhǔn)算法[1]。
1 點(diǎn)云特征描述方法
點(diǎn)云特征描述是點(diǎn)云識(shí)別、配準(zhǔn)的前提。特征點(diǎn)是指從點(diǎn)云中提取出的具有代表性和區(qū)分性的點(diǎn)集,用于描述點(diǎn)云的特征屬性。 其關(guān)鍵在于從點(diǎn)云中提取所需目標(biāo)的特征描述子,通過目標(biāo)的特征描述子來識(shí)別物體,識(shí)別準(zhǔn)確度依賴于所提取特征描述子的優(yōu)劣[2]。
點(diǎn)云特征描述方法一般分為全局特征和局部特征兩種類型。常見的全局特征有VFH、ESF等,局部特征有PFH、FPFH、SHOT 等。本文選擇局部特征FPFH 作為特征描述子。
1.1 表面法線
在三維物體的描述中,表面法線是非常重要的屬性之一。它不僅可以反映出三維表面的曲率變化,還可以獲得三維表面的形狀特征。 這里采用主成分分析法PCA,通過查詢點(diǎn)的最近鄰域構(gòu)建協(xié)方差矩陣,從而計(jì)算出表面法線。 這個(gè)過程可以通過求取協(xié)方差矩陣的特征值和特征向量來完成。設(shè)待求表面法線的點(diǎn)云P中任意一點(diǎn)Pm,創(chuàng)建的協(xié)方差矩陣為:
式中,Pm為查詢點(diǎn)所在的位置坐標(biāo);k為查詢點(diǎn)最近鄰域點(diǎn)的個(gè)數(shù);為最近鄰域點(diǎn)云的質(zhì)心所在的位置坐標(biāo);為矩陣的第n個(gè)特征值和特征向量,可以用來表示點(diǎn)云的主要方向。
1.2 點(diǎn)特征直方圖
點(diǎn)特征直方圖PFH[3]是一種常用的點(diǎn)云局部特征描述方法,能夠有效地描述點(diǎn)云中的局部幾何特征。其利用表面法線和查詢點(diǎn)k鄰域中所有點(diǎn)的關(guān)系,通過幾何特征處理k鄰域中的點(diǎn),并且用多維直方圖表示幾何特征。PFH 特征具有很強(qiáng)的抗干擾能力,即使在不同的噪聲下也能表現(xiàn)良好。圖1 為PFH 特征的影響區(qū)域圖,圖中pq表示查詢點(diǎn),虛線部分表示半徑為r 的球體,將查詢點(diǎn)與其所有鄰域點(diǎn)全部相連,計(jì)算鄰域中所有的點(diǎn)對關(guān)系,即可獲得PFH 直方圖。雖然PFH 特征描述方法在點(diǎn)云處理中具有廣泛的應(yīng)用,但是其計(jì)算復(fù)雜度比較高,為O(k2)。

圖1 PFH 特征鄰域圖
設(shè)pa與pb為相連的兩個(gè)點(diǎn),兩點(diǎn)的法線分別為na、nb,如圖2 所示。α、?、θ分別表示兩向量的偏差角度。
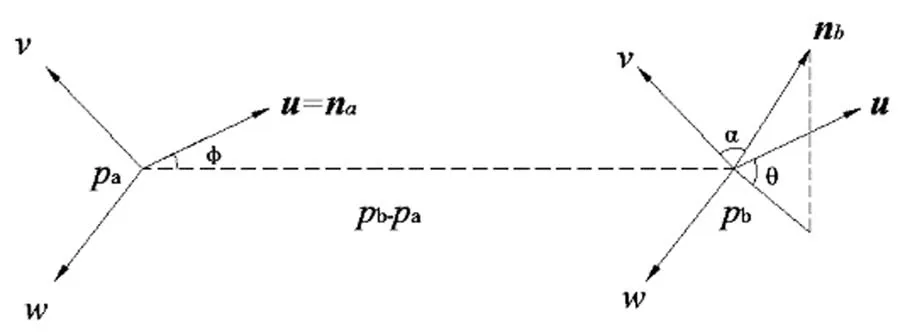
圖2 局部坐標(biāo)系
則有局部坐標(biāo)系為:
法線的偏差角度如下:
其中,兩點(diǎn)之間的歐氏距離為d= (pb-pa)z。通過對每組點(diǎn)對進(jìn)行四元組(α,?,θ,d) 求解,可以將其特征信息進(jìn)行壓縮,從12 個(gè)值減少為4 個(gè)。
在PCL 點(diǎn)云庫中,PFH 特征提取算法會(huì)從每組點(diǎn)對的四元組(α,?,θ,d) 中取出前三元(α,?,θ),并將每個(gè)特征值分成五份,形成一個(gè)125 維的直方圖,最終得到的PFH 特征向量即為一個(gè)125 維的向量。這個(gè)向量可以用于描述點(diǎn)云中每個(gè)點(diǎn)的幾何特征信息。
1.3 快速點(diǎn)特征直方圖
快速點(diǎn)特征直方圖FPFH[4]描述子是一種改進(jìn)的點(diǎn)云局部特征描述方法,它是在PFH 的基礎(chǔ)上進(jìn)行優(yōu)化得到的,能夠更快速、更準(zhǔn)確地描述點(diǎn)云中的局部幾何特征。通過引入點(diǎn)云中每個(gè)點(diǎn)與其法向量方向的偏差角度作為權(quán)重,來對PFH 進(jìn)行優(yōu)化,從而提高其對點(diǎn)云幾何形狀的描述精度。其計(jì)算復(fù)雜度從FPH 的O(k2)降低到了O(k)。FPFH 特征鄰域圖如圖3 所示。
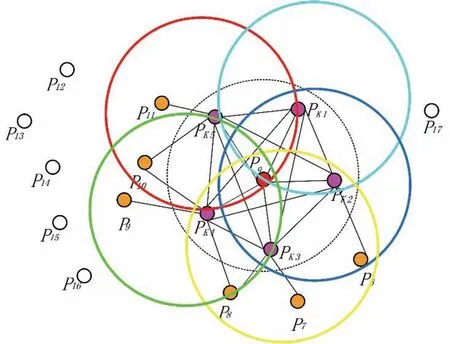
圖3 FPFH 特征鄰域圖
FPFH 描述子算法步驟如下:
(1)通過計(jì)算查詢點(diǎn)pq與k鄰域之間的三元組(α,?,θ) 來計(jì)算簡化點(diǎn)特征直方圖SPFH,其中三元組(α,?,θ) 表示鄰域中的每個(gè)點(diǎn)的位置關(guān)系。
(2)對于每個(gè)查詢點(diǎn),再次查找其鄰域點(diǎn)的k鄰域,計(jì)算每個(gè)鄰域點(diǎn)的三元組(α,?,θ),并將其與查詢點(diǎn)的三元組結(jié)合起來進(jìn)行加權(quán)平均,權(quán)重wk表示第二個(gè)鄰域中第k個(gè)點(diǎn)在第一個(gè)鄰域中的權(quán)重。計(jì)算公式如下:
與PFH 相比,F(xiàn)PFH 算法在計(jì)算查詢點(diǎn)和鄰域點(diǎn)之間的關(guān)系時(shí),并沒有完全將二者相連。因此,F(xiàn)PFH 算法的計(jì)算值較少。由于采用了加權(quán)的方法,使得其在計(jì)算時(shí)涵蓋了鄰域點(diǎn)的鄰域值,并且某些點(diǎn)可能會(huì)存在于多個(gè)鄰域中,會(huì)存在重復(fù)計(jì)算的情況。
在PCL 點(diǎn)云庫中,F(xiàn)PFH 特征提取算法將每個(gè)特征值分成11 份,形成一個(gè)33 維的直方圖。因此FPFH 特征向量是一個(gè)33 維的向量,用于描述點(diǎn)云中每個(gè)點(diǎn)的幾何特征信息。
2 點(diǎn)云配準(zhǔn)
2.1 點(diǎn)云配準(zhǔn)原理
目標(biāo)工件點(diǎn)云和模板點(diǎn)云存在相似的部分,并且兩個(gè)點(diǎn)云位于不同的坐標(biāo)系中。本文選取的目標(biāo)工件均為剛體,利用點(diǎn)云配準(zhǔn)使目標(biāo)工件點(diǎn)云和模板點(diǎn)云對齊,并獲取位姿變換矩陣。
將目標(biāo)工件點(diǎn)云中的一點(diǎn)P1和模板點(diǎn)云中的一點(diǎn)P1′ 作為一個(gè)匹配點(diǎn)對,兩者的旋轉(zhuǎn)變換矩陣為R,平移變換為t,可得:
設(shè)α、β、γ分別為沿著x軸、y軸、z軸的旋轉(zhuǎn)角,tx、ty、tz分別為沿著x軸、y軸、z軸的平移距離,共有六個(gè)未知數(shù)α、β、γ、tx、ty、tz。 因此,需要不少于三個(gè)匹配點(diǎn)才能求取位姿變換矩陣,且三個(gè)點(diǎn)不共線。由于噪聲的存在,通過一個(gè)匹配點(diǎn)對無法得到精確的變換矩陣,因此需要使用多個(gè)匹配點(diǎn)對進(jìn)行求解。對于已知匹配點(diǎn)對的情況下,可以通過最小二乘法來求解變換矩陣,最小化點(diǎn)云之間的距離誤差。
設(shè)目標(biāo)工件點(diǎn)云和模板點(diǎn)云分別為Pi(i=1,2,…,n)、Qi(i= 1,2,…,n)。為了計(jì)算旋轉(zhuǎn)平移變換的最優(yōu)解,使目標(biāo)工件點(diǎn)云和模板點(diǎn)云間的歐式距離之和為最小,則有如下關(guān)系式:
2.2 選取模板點(diǎn)云
目標(biāo)工件的位姿估計(jì)可以通過計(jì)算目標(biāo)工件點(diǎn)云和模板點(diǎn)云的旋轉(zhuǎn)平移變換來實(shí)現(xiàn)。選擇模板點(diǎn)云可以利用CAD 軟件建立目標(biāo)工件的三維模型,并將其轉(zhuǎn)換為點(diǎn)云數(shù)據(jù)。 也可以選取工件某一個(gè)位姿下的目標(biāo)點(diǎn)云作為模板點(diǎn)云。
在CAD 軟件中建立三維模型時(shí),利用Solid-Works 軟件構(gòu)造工件實(shí)際尺寸的三維模型,所構(gòu)造模型的坐標(biāo)系原點(diǎn)位置即為相機(jī)視覺系統(tǒng)坐標(biāo)系原點(diǎn)(選取彩色相機(jī)坐標(biāo)系為視覺系統(tǒng)的坐標(biāo)系),并且模型的坐標(biāo)系原點(diǎn)放置在工件的下底面中心位置。
在PCL 點(diǎn)云庫中,需要將CAD 模型轉(zhuǎn)換為點(diǎn)云支持的文件格式,例如obj 或ply 格式。為此,首先需要使用SolidWorks 軟件將CAD 模型轉(zhuǎn)換為ply 格式的文件。然后,將該文件導(dǎo)入到點(diǎn)云轉(zhuǎn)換程序中,并設(shè)置點(diǎn)云生成的合適密度。 需要注意的是,點(diǎn)數(shù)過多可能會(huì)降低點(diǎn)云配準(zhǔn)的計(jì)算速度,點(diǎn)數(shù)過少則可能會(huì)導(dǎo)致配準(zhǔn)結(jié)果錯(cuò)誤。 因此,需要根據(jù)具體情況選擇適當(dāng)?shù)狞c(diǎn)密度,可以通過體素濾波降采樣降低點(diǎn)的采樣密度,進(jìn)而提高配準(zhǔn)的效率和結(jié)果。
選取某一個(gè)位姿下的目標(biāo)點(diǎn)云作為模板點(diǎn)云時(shí),將該工件點(diǎn)云作為機(jī)械臂的初始抓取位姿。
2.3 SAC-IA 采樣一致性粗配準(zhǔn)
為了使點(diǎn)云配準(zhǔn)的方向趨于正確,使旋轉(zhuǎn)平移后的點(diǎn)云之間有較好的初始位置,避免陷入局部最優(yōu)解的情況[5],使用SAC-IA 采樣一致性算法獲取初始的目標(biāo)點(diǎn)云位姿。 如果直接用ICP 迭代最近點(diǎn)算法,會(huì)導(dǎo)致計(jì)算量過大,而且可能會(huì)得不到正確的轉(zhuǎn)換參數(shù)。SAC-IA 算法步驟如下[6]:
(1)從待配準(zhǔn)點(diǎn)云P中選取n個(gè)采樣點(diǎn),為了盡量保證所采樣的點(diǎn)具有不同的FPFH 特征,采樣點(diǎn)兩兩之間的距離應(yīng)該滿足大于預(yù)先給定最小距離閾值d。
(2)在目標(biāo)點(diǎn)云Q中查找與點(diǎn)云P中采樣點(diǎn)具有相似FPFH 特征的一個(gè)或多個(gè)點(diǎn),從這些相似點(diǎn)中隨機(jī)選取一個(gè)點(diǎn)作為點(diǎn)云P在目標(biāo)點(diǎn)云Q中的一一對應(yīng)點(diǎn)。
(3)計(jì)算對應(yīng)點(diǎn)之間剛體變換矩陣,然后通過求解對應(yīng)點(diǎn)變換后與采樣點(diǎn)距離的誤差來判斷當(dāng)前配準(zhǔn)結(jié)果的好壞。
(4)重復(fù)以上三個(gè)步驟,達(dá)到迭代次數(shù)后,選擇距離誤差和最小的對應(yīng)點(diǎn)對,作為粗配準(zhǔn)的最優(yōu)結(jié)果。
為了測試采樣一致性粗配準(zhǔn)算法的有效性,使用多個(gè)不同位姿下的工件點(diǎn)云作為目標(biāo)點(diǎn)云,分別進(jìn)行與模板點(diǎn)云的配準(zhǔn),并通過配準(zhǔn)結(jié)果和均方誤差判斷粗配準(zhǔn)的位置是否可以作為進(jìn)行精配準(zhǔn)的初始位姿。
2.4 優(yōu)化迭代最近點(diǎn)精配準(zhǔn)算法
ICP(Iterative Closest Point,迭代最近點(diǎn))[7]算法采用不斷迭代的方式,用最小二乘法得到兩個(gè)點(diǎn)云之間位置關(guān)系的最優(yōu)解[8]。其對點(diǎn)云初始位置的要求較為嚴(yán)格,為了提高點(diǎn)云配準(zhǔn)的成功率和精度,從而獲得更準(zhǔn)確的位姿信息,需要先進(jìn)行粗配準(zhǔn),再使用ICP 算法進(jìn)行優(yōu)化。
ICP 算法的核心思想是找到兩個(gè)點(diǎn)云中距離最近的對應(yīng)點(diǎn)對,通過反復(fù)迭代,使得點(diǎn)對間的歐氏距離最小,并計(jì)算最佳的旋轉(zhuǎn)矩和平移關(guān)系矩陣。該算法步驟為:
(1)將粗配準(zhǔn)后的兩片點(diǎn)云P′(經(jīng)過坐標(biāo)變換后的源點(diǎn)云)和Q,作為精配準(zhǔn)的初始點(diǎn)集。
(2)對源點(diǎn)云P′ 中的每一個(gè)點(diǎn)pi,在目標(biāo)點(diǎn)云Q中尋找距離最近的對應(yīng)點(diǎn)qi,作為該點(diǎn)在目標(biāo)點(diǎn)云中的對應(yīng)點(diǎn),組成初始對應(yīng)點(diǎn)對。
(3)初始對應(yīng)點(diǎn)集中的對應(yīng)關(guān)系并不都是正確的,錯(cuò)誤的對應(yīng)關(guān)系會(huì)影響最終的配準(zhǔn)結(jié)果,采用方向向量閾值剔除錯(cuò)誤的對應(yīng)點(diǎn)對。
(4)計(jì)算旋轉(zhuǎn)矩陣R和平移向量t,使函數(shù)的值最小。
(5)設(shè)定某一閾值ε和最大迭代次數(shù)Nmax,將上一步得到的剛體變換作用與源點(diǎn)云P′,得到新位置點(diǎn)云P″,計(jì)算P″ 和Q的距離誤差,如果兩次迭代的誤差小于閾值ε或者當(dāng)前迭代次數(shù)大于Nmax,則迭代結(jié)束,否則將初始配準(zhǔn)的點(diǎn)集更新為P″ 和Q,繼續(xù)重復(fù)上述步驟,直到滿足收斂條件。得到最終的旋轉(zhuǎn)矩陣R與平移矩陣t。
本文使用SVD(奇異值分解)法[9]求解對應(yīng)點(diǎn)集間的均方誤差,求解步驟如下。
首先,計(jì)算兩個(gè)點(diǎn)云的質(zhì)心:
假設(shè)最優(yōu)旋轉(zhuǎn)矩陣和平移向量為R、t,則Qi與的質(zhì)心相同,對點(diǎn)云P與Q去中心化得:
將式(9)與式(10)代入式(6)可知:
將式(12)展開,則有:
其中,U、V為3×3 的正交矩陣;Λ 為3×3 的對角矩陣。 令X=VUT,當(dāng)det (X) = 1,則R=X=VUT,為最優(yōu)旋轉(zhuǎn)矩陣,此時(shí)。
2.5 Trimmed ICP 精配準(zhǔn)
Trimmed ICP 算法由Chetverikov 等人[7]提出,是一種改進(jìn)的點(diǎn)云精配準(zhǔn)算法,它旨在解決兩片點(diǎn)云之間不能完全重合并且包含大量離群點(diǎn),以及傳統(tǒng)的ICP 算法對于非重疊部分的點(diǎn)對匹配效果不佳等問題。該算法利用截?cái)嘧钚《耍↙east Trimmed Squares)方法,對匹配點(diǎn)對之間的歐式距離進(jìn)行排序,選取一定百分比的匹配點(diǎn)對參與目標(biāo)方程的優(yōu)化求解,該方法可以有效降低無關(guān)點(diǎn)對配準(zhǔn)結(jié)果的影響,提高配準(zhǔn)算法的魯棒性[10]。
其算法原理如下:
對于模板點(diǎn)云P中點(diǎn)的個(gè)數(shù)不等于目標(biāo)點(diǎn)云Q中點(diǎn)個(gè)數(shù)的兩個(gè)點(diǎn)集,模板點(diǎn)云中的一些點(diǎn)在目標(biāo)點(diǎn)集中可能沒有對應(yīng)關(guān)系。假設(shè)可以匹配的點(diǎn)的最小保證率為σ,那么可以配對的點(diǎn)數(shù)量為NP0=σN,當(dāng)σ= 1 時(shí)就是ICP。
(1)對于P中的每個(gè)點(diǎn),找出Q中最近的點(diǎn),并計(jì)算各個(gè)點(diǎn)對之間的距離。
(3)滿足約束條件(與ICP 相同)則退出程序,否則令sum′=sum 并繼續(xù)下一步。
(4)利用(2)中選定的前Np0個(gè)對應(yīng)點(diǎn)對,采用最小二乘方法計(jì)算最佳變換(R,t)。
(5)利用(R,t) 變換待配準(zhǔn)點(diǎn)云P并循環(huán)。
重復(fù)上述步驟,直到滿足如下三個(gè)條件之一時(shí),停止迭代并得出配準(zhǔn)結(jié)果。
(1)達(dá)到最大迭代次數(shù)。
(3)兩次迭代值幾乎不變。
3 實(shí)驗(yàn)結(jié)果及分析
為驗(yàn)證本文算法,采用深度相機(jī)Kinect v2 分別采集長方體工件和內(nèi)六角螺絲工件的點(diǎn)云數(shù)據(jù)進(jìn)行對比實(shí)驗(yàn)。實(shí)驗(yàn)平臺(tái)為Windows10 系統(tǒng),CPU 主頻2.3 GHz,內(nèi)存16 G,利用Visual Studio C++編程進(jìn)行點(diǎn)云配準(zhǔn)實(shí)驗(yàn)。
3.1 長方體目標(biāo)工件
利用SolidWorks 建立工件實(shí)際尺寸的三維模型,并導(dǎo)出為點(diǎn)云文件。 由于目標(biāo)工件是對稱的長方體,且目標(biāo)點(diǎn)云為工件點(diǎn)云的一部分,如果將目標(biāo)點(diǎn)云與工件完整點(diǎn)云進(jìn)行配準(zhǔn),可能會(huì)得到不同的位姿信息。 因此,將模型轉(zhuǎn)換的點(diǎn)云沿z= 0 的平面分割,利用平面上部的點(diǎn)云進(jìn)行配準(zhǔn)。模板點(diǎn)云如圖4 所示。

圖4 分割后的點(diǎn)云模板
為了驗(yàn)證采樣一致性粗配準(zhǔn)算法的可行性,將長方體工件擺放了6 個(gè)不同的位姿,分別進(jìn)行目標(biāo)點(diǎn)云與模板點(diǎn)云的配準(zhǔn),工件位置擺放方式如圖5 所示。
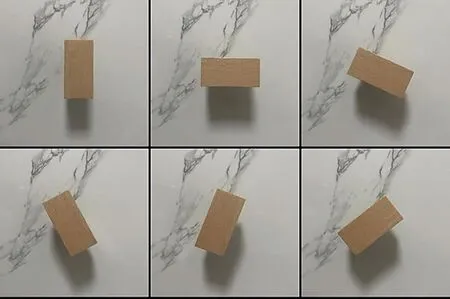
圖5 長方體工件擺放方式圖
首先計(jì)算兩點(diǎn)云的法向量與FPFH 特征值,設(shè)置FPFH 搜索半徑為0.1 m。在提取匹配點(diǎn)對后,進(jìn)行SAC-IA 粗配準(zhǔn)。其中第一個(gè)位姿粗配準(zhǔn)后的結(jié)果如圖6 所示。

圖6 長方體工件SAC-IA 粗配準(zhǔn)結(jié)果
圖6 中模板點(diǎn)云為綠色,目標(biāo)工件點(diǎn)云為紅色。目標(biāo)工件在6 個(gè)不同位姿下的SAC-IA 粗配準(zhǔn)結(jié)果如表1 所示,均方誤差MSE 表示迭代結(jié)束后所有對應(yīng)點(diǎn)距離平方和的平均值。
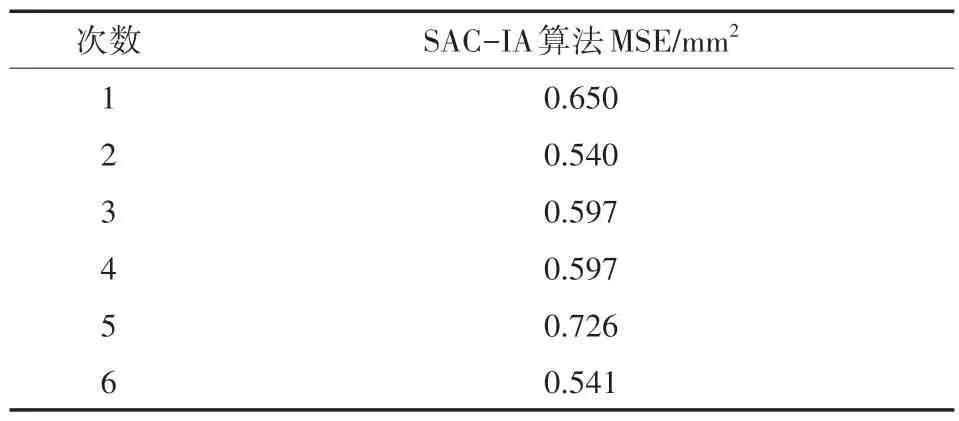
表1 長方體工件SAC-IA配準(zhǔn)結(jié)果
從表1 中可以計(jì)算出粗配準(zhǔn)的平均MSE 為0.608 5 mm2,可以作為進(jìn)行精配準(zhǔn)的初始位姿。
使用SAC-IA 粗配準(zhǔn)結(jié)果作為配準(zhǔn)初始位置。分別使用ICP 算法與Trimmed ICP 算法進(jìn)行精配準(zhǔn),長方體工件其中一個(gè)位姿的配準(zhǔn)結(jié)果如圖7、圖8 所示,分別為ICP 算法和Trimmed ICP算法配準(zhǔn)后的結(jié)果。 其中紅色表示目標(biāo)點(diǎn)云,綠色表示模板點(diǎn)云。

圖7 長方體工件ICP 算法配準(zhǔn)后的結(jié)果
圖8 長方體工件Trimmed ICP 算法配準(zhǔn)后的結(jié)果
從圖7、圖8 可以看出,ICP 算法配準(zhǔn)之后,兩片點(diǎn)云已經(jīng)大致重合,Trimmed ICP 算法配準(zhǔn)之后,兩片點(diǎn)云的各個(gè)部位均得到了較好的融合,綠色的模板點(diǎn)云基本配準(zhǔn)到紅色的目標(biāo)點(diǎn)云的對應(yīng)位置。 為了驗(yàn)證算法的有效性和優(yōu)劣,采用均方誤差(MSE)作為點(diǎn)云配準(zhǔn)精度的評價(jià)指標(biāo)。表2 統(tǒng)計(jì)了6 個(gè)不同位姿下精配準(zhǔn)ICP 算法和Trimmed ICP 算法的用時(shí)與誤差。
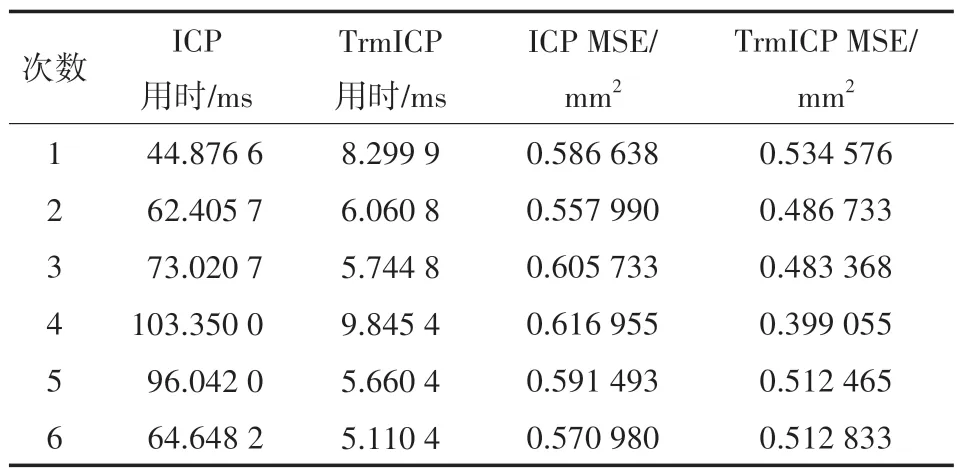
表2 長方體工件精配準(zhǔn)結(jié)果對比
從表2 中可以看出,相對于ICP 算法,Trimmed ICP 算法無論是配準(zhǔn)速率還是配準(zhǔn)精度都有了明顯的改善。在6 組點(diǎn)云數(shù)據(jù)實(shí)驗(yàn)中,該算法配準(zhǔn)時(shí)間平均降低了91%,MSE 降低了17.0%,配準(zhǔn)效率得到了提升。
3.2 內(nèi)六角螺絲目標(biāo)工件
將內(nèi)六角螺絲擺放12 個(gè)不同的位姿,選取第一個(gè)位姿下的工件點(diǎn)云作為模板點(diǎn)云,分別進(jìn)行其余11 個(gè)位姿下目標(biāo)點(diǎn)云與模板點(diǎn)云的配準(zhǔn),工件位置擺放方式如圖9 所示。
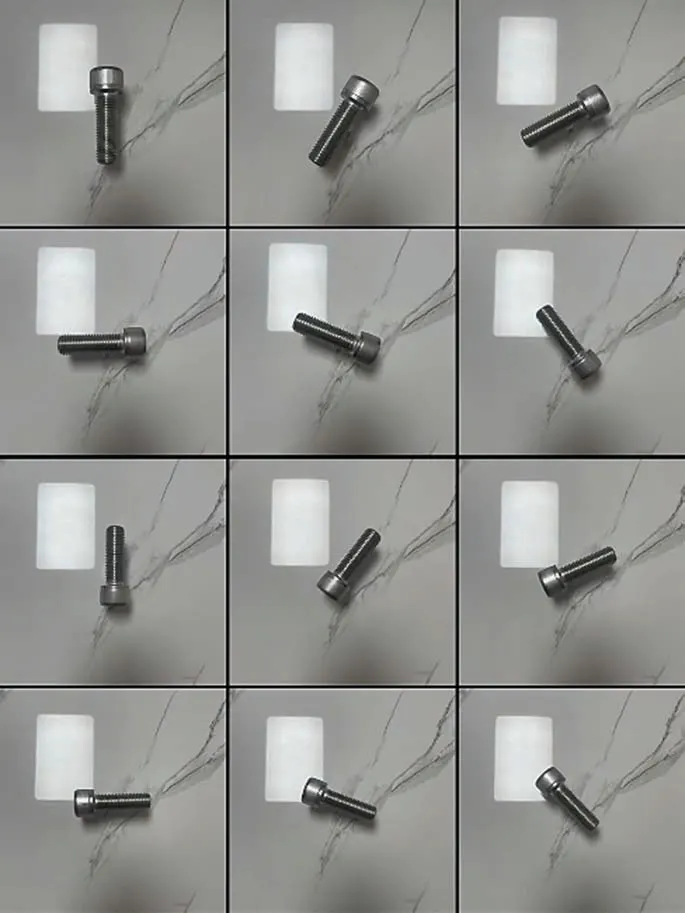
圖9 內(nèi)六角螺絲工件擺放方式圖
進(jìn)行采樣一致性粗配準(zhǔn),計(jì)算FPFH 特征值,設(shè)置FPFH 搜索半徑為0.1 m,在提取匹配點(diǎn)對后進(jìn)行粗配準(zhǔn)。內(nèi)六角螺絲工件在11 個(gè)不同位姿下的SAC-IA 粗配準(zhǔn)結(jié)果如表3 所示。
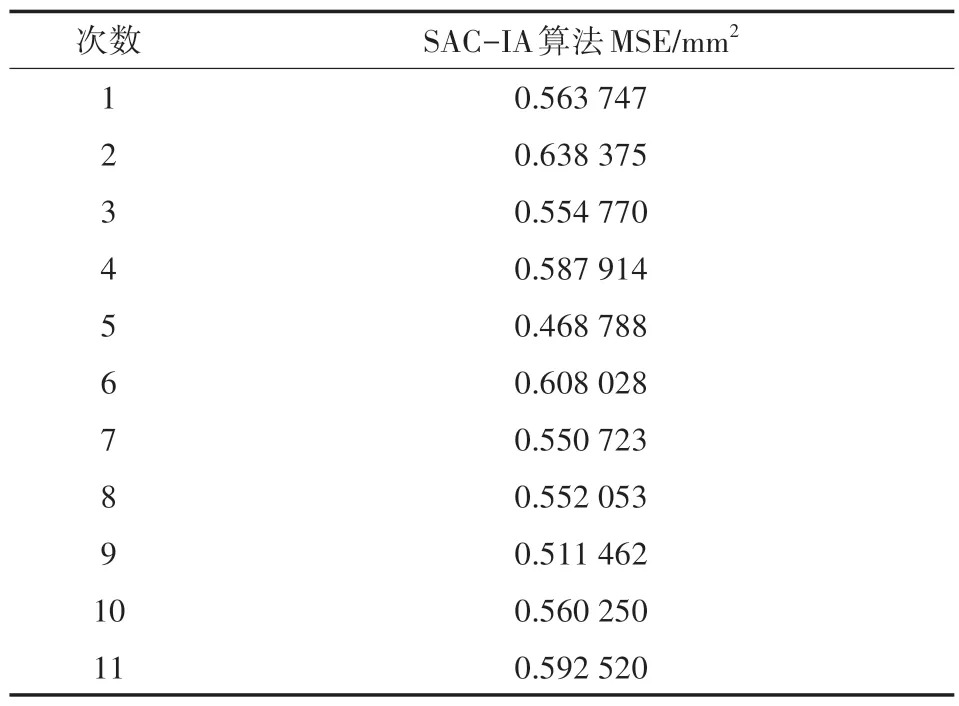
表3 內(nèi)六角螺絲工件SAC-IA配準(zhǔn)結(jié)果
從表3 中可以計(jì)算出粗配準(zhǔn)的平均MSE 為0.562 602 73 mm2,可以作為進(jìn)行精配準(zhǔn)的初始位姿。
使用SAC-IA 粗配準(zhǔn)結(jié)果作為初始配準(zhǔn)位置,分別進(jìn)行ICP 精配準(zhǔn)和Trimmed ICP 精配準(zhǔn),內(nèi)六角螺絲工件其中一個(gè)位姿下的配準(zhǔn)結(jié)果如圖10、圖11 所示。 分別為ICP 算法配準(zhǔn)后的結(jié)果、Trimmed ICP 算法配準(zhǔn)后的結(jié)果。 其中紅色表示待配準(zhǔn)螺絲工件點(diǎn)云,綠色表示模板點(diǎn)云。
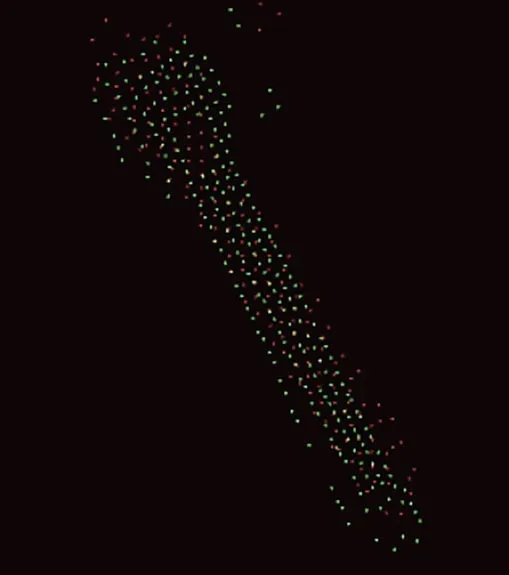
圖10 內(nèi)六角螺絲工件ICP 算法配準(zhǔn)后的結(jié)果
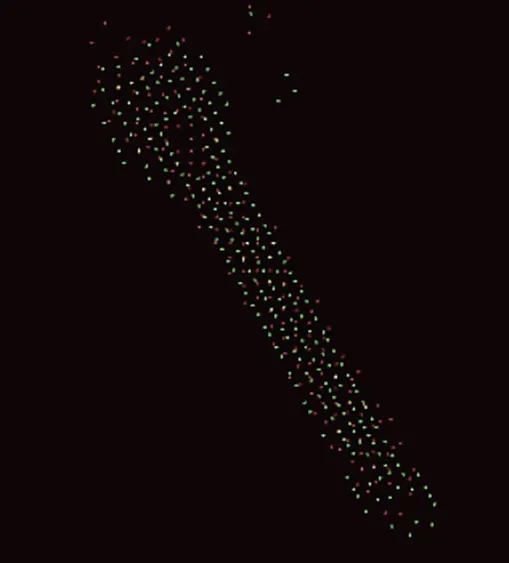
圖11 內(nèi)六角螺絲工件Trimmed ICP 算法配準(zhǔn)后的結(jié)果
從圖10、圖11 中可以看出,ICP 算法配準(zhǔn)之后,兩片點(diǎn)云仍然大致重合,Trimmed ICP 算法配準(zhǔn)之后,兩片點(diǎn)云的各個(gè)部位均得到了較好的融合,綠色的模板點(diǎn)云基本配準(zhǔn)到紅色的目標(biāo)點(diǎn)云的對應(yīng)位置。 同時(shí),仍然采用均方誤差(MSE)作為點(diǎn)云配準(zhǔn)精度的評價(jià)指標(biāo)。 表4 統(tǒng)計(jì)了11 個(gè)不同位姿下精配準(zhǔn)ICP 算法和Trimmed ICP 算法的用時(shí)與誤差數(shù)據(jù)。
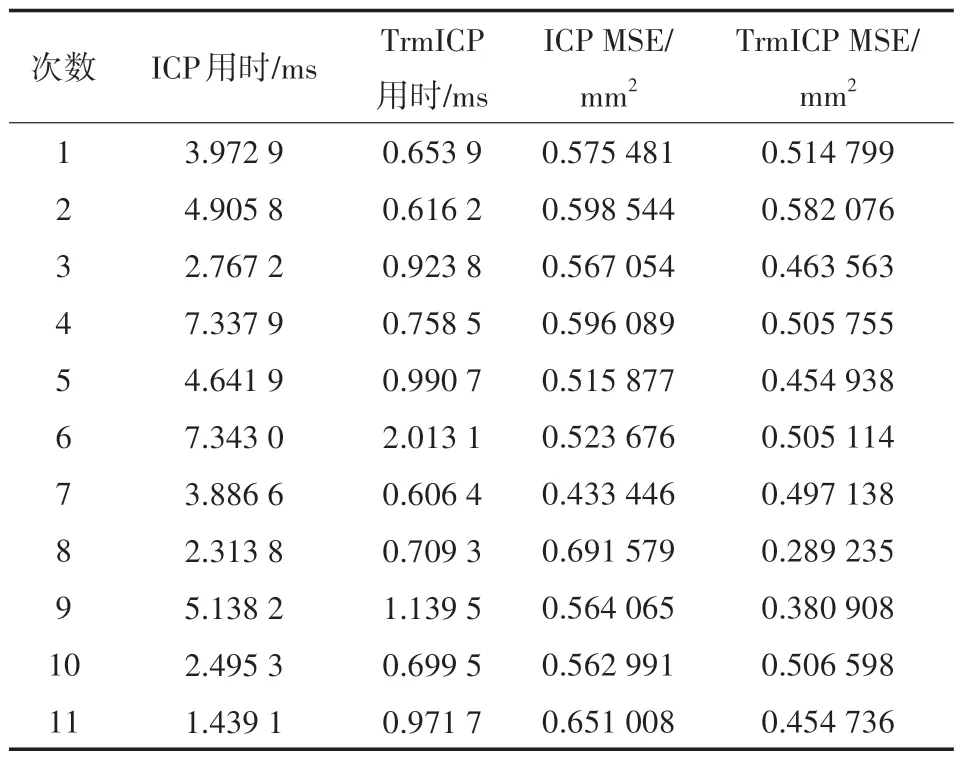
表4 內(nèi)六角螺絲工件精配準(zhǔn)結(jié)果對比
從表4 中可以看出,相對于ICP 算法,Trimmed ICP 算法無論是配準(zhǔn)速率還是配準(zhǔn)精度都有了明顯的改善。在11 組點(diǎn)云數(shù)據(jù)實(shí)驗(yàn)中,該算法配準(zhǔn)時(shí)間平均降低了78.2%,MSE 降低了18.0%。由上述分析可知,SAC-IA 粗配準(zhǔn)和Trimmed ICP精配準(zhǔn)能夠在配準(zhǔn)結(jié)果有效的基礎(chǔ)上,在誤差允許的范圍內(nèi),提高配準(zhǔn)精度,并大幅提升配準(zhǔn)的收斂速度。
4 結(jié)論
本文結(jié)合三維點(diǎn)云,完成了對長方體工件和內(nèi)六角螺絲工件在不同擺放方式下的位姿估計(jì)方法研究。通過計(jì)算FPFH 特征值提取目標(biāo)點(diǎn)云和模板點(diǎn)云的特征點(diǎn)對,完成了點(diǎn)云配準(zhǔn)實(shí)驗(yàn)。實(shí)驗(yàn)中,SAC-IA 粗配準(zhǔn)之后,在優(yōu)化后的傳統(tǒng)ICP 精配準(zhǔn)基礎(chǔ)上,進(jìn)行了Trimmed ICP 精配準(zhǔn),并統(tǒng)計(jì)了不同工件不同擺放方式下兩種配準(zhǔn)方法的用時(shí)和誤差。上述實(shí)驗(yàn)表明,結(jié)合SAC-IA粗配準(zhǔn)與Trimmed ICP 精配準(zhǔn)的點(diǎn)云配準(zhǔn)方法具有相對較高的配準(zhǔn)精度和更快的收斂速度,配準(zhǔn)效率有了顯著提升。
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2022年3期)2022-04-26 14:04:16
數(shù)學(xué)年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學(xué)學(xué)報(bào)(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數(shù)學(xué)(2019年8期)2019-11-25 01:38:14
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學(xué)學(xué)報(bào)(2016年1期)2016-06-22 13:10:38