基于卡爾曼濾波的高精度溫度脈動(dòng)儀設(shè)計(jì)
2024-01-05 07:21:18黎一宏常帥張恒步宏坤
黎一宏,常帥,張恒,步宏坤
(長(zhǎng)春理工大學(xué) 光電工程學(xué)院,長(zhǎng)春 130022)
光學(xué)湍流效應(yīng)是制約空間激光通信發(fā)展的重要因素,由于大氣湍流造成折射率的隨機(jī)起伏會(huì)影響空間激光通信的質(zhì)量,因此研究并測(cè)量大氣折射率結(jié)構(gòu)常數(shù)是研究光波傳輸?shù)闹匾h(huán)節(jié)[1-2]。國(guó)內(nèi)外都對(duì)大氣折射率結(jié)構(gòu)常數(shù)的測(cè)量進(jìn)行了大量的探索。 研究表明,大氣湍流對(duì)光波在大氣傳輸?shù)挠绊懼饕怯捎跍囟鹊钠鸱鸬摹囟让}動(dòng)儀通過(guò)對(duì)空間兩點(diǎn)的微溫脈動(dòng)量實(shí)時(shí)測(cè)量,反演大氣折射率結(jié)構(gòu)常數(shù),是一種較為常用的大氣湍流強(qiáng)度測(cè)量?jī)x器[3-4]。溫度脈動(dòng)儀探測(cè)的微溫脈動(dòng)量變化量小,頻率高,現(xiàn)有的溫度脈動(dòng)儀設(shè)備對(duì)高頻溫度脈動(dòng)信號(hào)采集時(shí),噪音較大。 現(xiàn)采用卡爾曼濾波原理對(duì)采集到的溫度脈動(dòng)信號(hào)進(jìn)行濾波處理,減小信號(hào)的噪音毛刺,提高設(shè)備的測(cè)量精度,并使用溫度脈動(dòng)儀對(duì)長(zhǎng)春地區(qū)大氣折射率結(jié)構(gòu)常數(shù)進(jìn)行測(cè)量。
1 實(shí)驗(yàn)原理與設(shè)備研制
1.1 溫度脈動(dòng)儀測(cè)量原理及設(shè)備研制
科爾莫戈羅夫(Kolmogorov)的“2/3”定律認(rèn)為:在湍流的慣性區(qū)內(nèi),兩點(diǎn)間的折射率結(jié)構(gòu)常數(shù)只與兩點(diǎn)間距離的2/3 次方有關(guān),與兩點(diǎn)的位置和相對(duì)方向無(wú)關(guān)。 在此定律基礎(chǔ)上,可推導(dǎo)出折射率結(jié)構(gòu)常數(shù)的計(jì)算公式如下:
由公式(1)和公式(2)可知,當(dāng)氣壓P、溫度T、距離r和溫度差的系綜平均值為已知量時(shí),可計(jì)算得出折射率結(jié)構(gòu)常數(shù)為。氣壓P和溫度T可通過(guò)氣壓傳感器和溫度傳感器獲得,使用米尺和游標(biāo)卡尺等工具可以精確地測(cè)得距離r,溫度差的系綜平均值需要對(duì)溫度脈動(dòng)儀測(cè)量的數(shù)據(jù)進(jìn)行反演計(jì)算獲得。由于溫度差的系綜平均值不能被直接測(cè)量,則需要一個(gè)能夠反映其特征的可測(cè)量值來(lái)代替。溫度脈動(dòng)儀采用直徑25 μm、電阻值為50 Ω 的鉑絲作為傳感器(兩個(gè)鉑絲探頭的電阻差值不大于標(biāo)準(zhǔn)值的0.4%),感應(yīng)大氣湍流慣性區(qū)內(nèi)空間兩點(diǎn)溫度的細(xì)微差異,將表示大氣狀態(tài)的物理量溫度差轉(zhuǎn)化為可測(cè)量的電信號(hào)電壓差。鉑絲的電阻值隨溫度變化的公式為:
由此得出:
式中,R0為T0下的電阻值,單位為Ω;α為電阻溫度系數(shù),單位為K-1;Tω為鉑絲實(shí)際溫度;T0為鉑絲標(biāo)定時(shí)的溫度。
鉑絲的溫度系數(shù)為(3.908 3×10-3)(ppm/℃),因此根據(jù)公式(4),50 Ω 的鉑絲電阻在發(fā)生1 ℃的溫度變化時(shí),其阻值變化為:
1 Ω 的電阻變化經(jīng)過(guò)溫度脈動(dòng)儀測(cè)溫電路的放大,最終引起的電壓變化為5.2 V,因此可以推出當(dāng)鉑絲電阻探頭發(fā)生1 ℃的溫度變化時(shí),最終引起電路上的電壓變化為:
因此溫度脈動(dòng)儀的溫度引起電壓改變的系數(shù)為:
由此關(guān)系可以利用鉑絲電阻的電壓變化反演溫度的脈動(dòng)變化。
本文采用的溫度脈動(dòng)儀設(shè)計(jì)方案使用四線制測(cè)量電阻法,對(duì)鉑絲電阻的阻值進(jìn)行測(cè)量,最大限度消除導(dǎo)線電阻引入的誤差,使用2.3 mA的恒流源對(duì)用于探測(cè)溫度脈動(dòng)的鉑絲電阻通電,電阻流過(guò)的電流極低,減小了電流增溫效應(yīng)對(duì)測(cè)量的影響。采用24 位低噪音ADC 采集芯片采集電壓值,ADC 采集芯片的采集頻率最高可達(dá)到100 Hz,滿足對(duì)高頻溫度脈動(dòng)量的測(cè)量需求,經(jīng)過(guò)單片機(jī)將數(shù)據(jù)輸出,溫度脈動(dòng)儀的電子學(xué)框圖如圖1 所示。
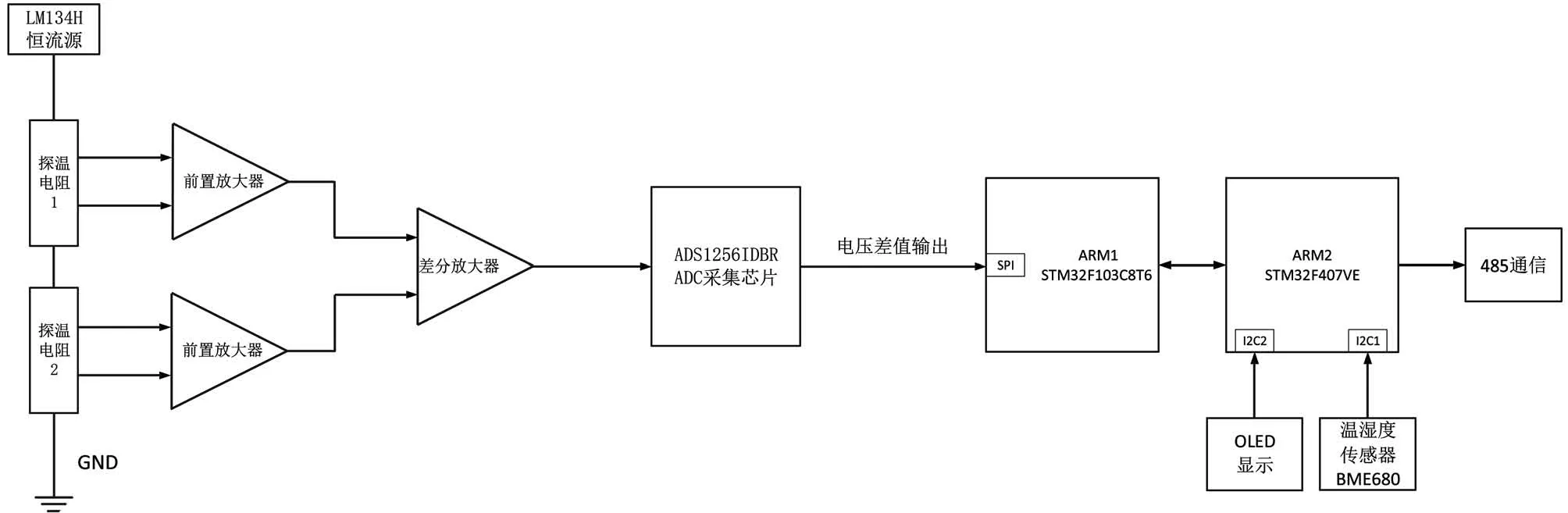
圖1 溫度脈動(dòng)儀電子學(xué)框圖
鉑絲探頭受到溫度脈動(dòng)電阻值發(fā)生變化,兩探頭上的電阻結(jié)果測(cè)溫電路差分放大后由ADC采集模塊準(zhǔn)確采集探頭上的電壓差值,傳入信號(hào)處理模塊。信號(hào)處理模塊主要由兩塊單片機(jī)組成,使用一塊STM32F103 單片機(jī)接收ADC 模塊采集出的數(shù)據(jù),對(duì)采集的數(shù)據(jù)做濾波算法處理后發(fā)送到一塊STM32F407 單片機(jī)上,STM32F407單片機(jī)收集采集到的濾波后的電壓差值數(shù)據(jù)與BME680 傳感器傳輸來(lái)的氣象數(shù)據(jù),一并通過(guò)串口輸出到上位機(jī),同時(shí)控制OLED 顯示屏實(shí)時(shí)顯示數(shù)據(jù),上位機(jī)通過(guò)軟件對(duì)數(shù)據(jù)進(jìn)行反演檢測(cè)大氣折射率結(jié)構(gòu)常數(shù)。
1.2 基于卡爾曼濾波的溫度脈動(dòng)儀改進(jìn)設(shè)計(jì)
卡爾曼濾波的原理包括兩個(gè)主要過(guò)程:預(yù)估與校正。預(yù)估過(guò)程主要是利用時(shí)間更新方程建立對(duì)當(dāng)前狀態(tài)的先驗(yàn)估計(jì),及時(shí)向前推算當(dāng)前狀態(tài)變量和誤差協(xié)方差估計(jì)的值,以便為下一個(gè)時(shí)間狀態(tài)構(gòu)造先驗(yàn)估計(jì)值。校正過(guò)程負(fù)責(zé)反饋,利用測(cè)量更新方程在預(yù)估過(guò)程的先驗(yàn)估計(jì)值及當(dāng)前測(cè)量變量的基礎(chǔ)上建立起對(duì)當(dāng)前狀態(tài)改進(jìn)的后驗(yàn)估計(jì)。 這個(gè)過(guò)程稱之為預(yù)估-校正過(guò)程,對(duì)應(yīng)的估計(jì)算法稱為預(yù)估-校正算法[8-9]。以下給出卡爾曼濾波的時(shí)間更新方程和狀態(tài)更新方程。
時(shí)間更新方程:
狀態(tài)更新方程:
式中,Xk為系統(tǒng)狀態(tài)變量;Uk是系統(tǒng)外部輸入;A是系統(tǒng)狀態(tài)轉(zhuǎn)移矩陣;B是系統(tǒng)輸入控制矩陣;是先驗(yàn)估計(jì)的預(yù)測(cè)協(xié)方差矩陣;k為算法的迭代次數(shù);Q是控制過(guò)程噪音的協(xié)方差矩陣;Gk是卡爾曼增益;H是觀測(cè)矩陣;R為觀測(cè)噪音的協(xié)方差矩陣;Zk為觀測(cè)值;I為單位矩陣。
大氣湍流的擾動(dòng)頻率很高,通常可以達(dá)到上百赫茲,而溫度脈動(dòng)引起大氣折射率結(jié)構(gòu)常數(shù)變化是一個(gè)緩慢的過(guò)程,因此在采集溫度脈動(dòng)信號(hào)時(shí)可采用卡爾曼濾波的思路,利用上一個(gè)采樣周期的系統(tǒng)狀態(tài)定義為預(yù)估的當(dāng)前狀態(tài),結(jié)合測(cè)溫電路采集到的當(dāng)前周期的數(shù)據(jù)進(jìn)行加權(quán)組合得到系統(tǒng)的真實(shí)狀態(tài)。在對(duì)溫度脈動(dòng)進(jìn)行高頻采集的同時(shí)降低由于硬件或環(huán)境異常擾動(dòng)造成的噪音。由于是對(duì)采集到的單變量數(shù)據(jù)進(jìn)行濾波,所以矩陣的維數(shù)都為1。在溫度脈動(dòng)儀信號(hào)處理模塊中的STM32F103 單片機(jī)上建立卡爾曼濾波算法模型,對(duì)采集到的電壓數(shù)據(jù)進(jìn)行濾波。 首先定義卡爾曼濾波結(jié)構(gòu)體包含:上次估算協(xié)方差Pk- 1,當(dāng)前估算協(xié)方差Pk,卡爾曼濾波器輸出Out,卡爾曼增益G,過(guò)程噪音協(xié)方差Q,觀測(cè)噪音協(xié)方差R,并將估算協(xié)方差、過(guò)程噪音協(xié)方差、觀測(cè)噪音協(xié)方差參數(shù)初始化。ADC 芯片采集的電壓數(shù)據(jù)為Input,進(jìn)入卡爾曼濾波循環(huán),根據(jù)公式(5)~(9)的卡爾曼濾波原理,設(shè)計(jì)溫度脈動(dòng)儀的卡爾曼濾波模型:
預(yù)測(cè)協(xié)方差方程:
卡爾曼增益方程:
更新最優(yōu)值方程:
更新預(yù)測(cè)協(xié)方差方程:
數(shù)據(jù)進(jìn)入卡爾曼濾波循環(huán)后,將上一時(shí)刻輸出值數(shù)據(jù)作為當(dāng)前時(shí)刻的預(yù)測(cè)值,使用卡爾曼增益進(jìn)行加權(quán)計(jì)算后得到這一時(shí)刻的狀態(tài)變量最優(yōu)值后,輸出經(jīng)過(guò)計(jì)算的數(shù)據(jù)得到濾波后的電壓值,將電路噪音進(jìn)行濾波,同時(shí)可以減小外界異常干擾造成電壓值不穩(wěn)定而形成的毛刺。
圖2 為STM32F103 單片機(jī)的工作流程圖。在系統(tǒng)開(kāi)機(jī)后,首先其內(nèi)部進(jìn)行初始化工作,主要針對(duì)ADC 模塊的工作模式進(jìn)行配置,使其能夠保障轉(zhuǎn)換精度的同時(shí),較快速地采集鉑絲探頭兩端的電壓信號(hào)。之后該單片機(jī)進(jìn)入循環(huán)工作狀態(tài),讀取ADC 模塊輸出的電壓數(shù)據(jù),在單片機(jī)內(nèi)寫(xiě)入利用卡爾曼濾波算法對(duì)采集得到的信號(hào)進(jìn)行迭代濾波,將上一次的輸出值作為下一次循環(huán)的預(yù)測(cè)值進(jìn)行數(shù)據(jù)迭代,對(duì)采集到的電壓信號(hào)進(jìn)行加權(quán)計(jì)算后得到當(dāng)前時(shí)刻的最優(yōu)值,降低電壓信號(hào)內(nèi)的噪聲信息,提高采集精度,之后單片機(jī)將最優(yōu)值數(shù)據(jù)輸出,通過(guò)串口發(fā)送至STM32F407 內(nèi)核單片機(jī)中,進(jìn)行后續(xù)處理。

圖2 溫度脈動(dòng)儀STM32F103 單片機(jī)工作流程圖
2 實(shí)驗(yàn)結(jié)果與討論
2.1 卡爾曼濾波器濾波效果
為驗(yàn)證卡爾曼濾波降低溫度脈動(dòng)儀噪音的效果,現(xiàn)將溫度脈動(dòng)儀中測(cè)溫電路采集到的電壓原始數(shù)據(jù)單獨(dú)導(dǎo)出到上位機(jī)上的卡爾曼濾波程序中,需要手動(dòng)調(diào)節(jié)卡爾曼濾波參數(shù):過(guò)程噪聲協(xié)方差Q,觀測(cè)噪聲協(xié)方差R,得到好的濾波效果后,將卡爾曼濾波器的初始值燒錄到單片機(jī)中,使溫度脈動(dòng)儀在采集電壓后立即濾波,簡(jiǎn)化后續(xù)的數(shù)據(jù)處理。原始電壓數(shù)據(jù)經(jīng)濾波后的對(duì)比如圖3 所示。
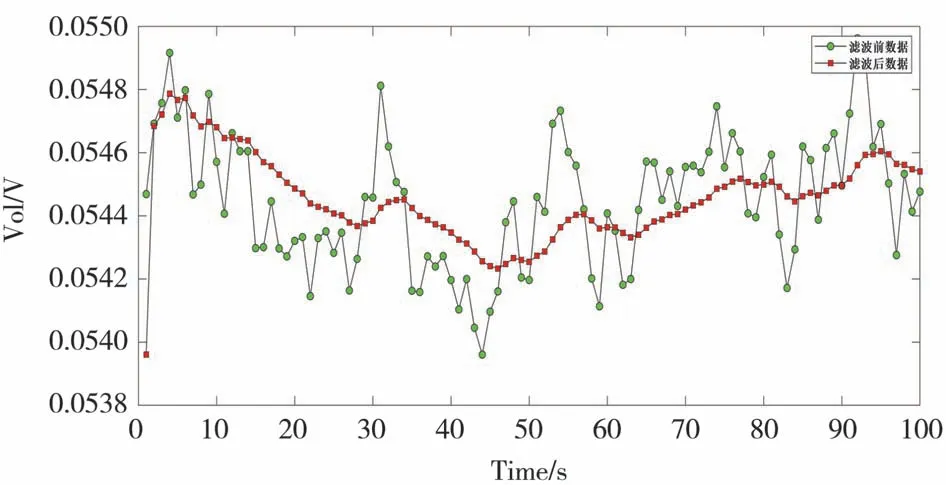
圖3 卡爾曼濾波器的電壓濾波效果
由此可見(jiàn)經(jīng)過(guò)濾波后的電壓數(shù)據(jù)在變化趨勢(shì)上符合原始數(shù)據(jù)的同時(shí),極大減少了數(shù)據(jù)中的毛刺噪音,極大提高了數(shù)據(jù)的可靠程度,在后續(xù)通過(guò)電壓反演溫度脈動(dòng)變化時(shí),極大提升數(shù)據(jù)的精度。
2.2 溫度脈動(dòng)儀噪音測(cè)試
為進(jìn)一步研究卡爾曼濾波對(duì)溫度脈動(dòng)儀精度的提升,對(duì)溫度脈動(dòng)儀進(jìn)行噪音測(cè)試。 現(xiàn)將兩個(gè)精密的50 Ω 定值電阻替換掉原來(lái)的鉑絲傳感器探頭安裝到溫度脈動(dòng)儀的探測(cè)天線兩端,記錄下原始的電壓數(shù)據(jù),然后將通過(guò)卡爾曼濾波器后的數(shù)據(jù)與原始數(shù)據(jù)對(duì)比,結(jié)果如圖4 所示。
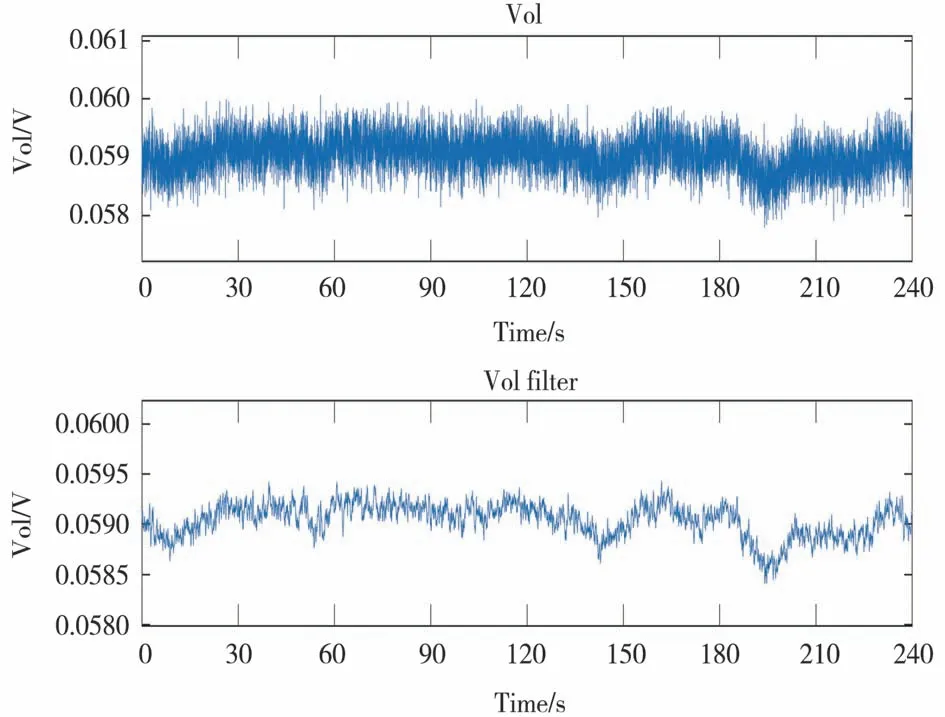
圖4 溫度脈動(dòng)儀噪音對(duì)比
使用定值電阻替代傳感器探頭,兩端的電壓差值應(yīng)該恒定無(wú)變化,電壓差值應(yīng)該呈現(xiàn)一條平穩(wěn)的直線,此情況下可以對(duì)溫度脈動(dòng)儀的噪音進(jìn)行測(cè)量。
實(shí)驗(yàn)前經(jīng)過(guò)精密電阻計(jì)測(cè)得兩精密定值電阻的電阻值之差為0.011 Ω,此阻值差值經(jīng)過(guò)溫度脈動(dòng)儀測(cè)溫電路差分放大后帶來(lái)的電壓差值為0.059 V,因此噪音測(cè)試時(shí)電壓差值始終有0.059 V 左右的輸出。結(jié)果對(duì)比可知,在添加濾波算法前溫度脈動(dòng)儀的原始數(shù)據(jù)噪音在0.002 V范圍內(nèi),噪音總體的毛刺還是比較突出;經(jīng)過(guò)卡爾曼濾波后,噪音控制在0.001 V 以內(nèi),噪音降低50%,消除數(shù)據(jù)中的毛刺噪音,濾波效果極好。按照本文中溫度脈動(dòng)儀測(cè)量電壓和探測(cè)溫度的轉(zhuǎn)換關(guān)系,改進(jìn)后溫度脈動(dòng)儀的噪音對(duì)應(yīng)的溫度脈動(dòng)在0.001 K 范圍內(nèi)。根據(jù)公式(1)和公式(2)的大氣折射率結(jié)構(gòu)常數(shù)計(jì)算公式,0.001 K 的溫度脈動(dòng)噪音計(jì)算為大氣折射率結(jié)構(gòu)常數(shù)為10-18m-2/3量級(jí),處于溫度脈動(dòng)儀的測(cè)量下限,遠(yuǎn)小于正常測(cè)量時(shí)大氣湍流數(shù)據(jù),對(duì)測(cè)量結(jié)果影響極低,提高了設(shè)備的測(cè)量準(zhǔn)確性。
2.3 溫度脈動(dòng)儀大氣折射率結(jié)構(gòu)常數(shù)測(cè)量實(shí)驗(yàn)
使用改進(jìn)后的溫度脈動(dòng)儀在長(zhǎng)春地區(qū)搭建大氣折射率結(jié)構(gòu)常數(shù)測(cè)量平臺(tái),地理位置為長(zhǎng)春市南關(guān)區(qū)生態(tài)大街6666 號(hào)創(chuàng)業(yè)服務(wù)中心西附樓。測(cè)量點(diǎn)在四樓天臺(tái),海拔212 m,經(jīng)度125.39,緯度43.78。溫度脈動(dòng)儀搭載在距下墊面1 m 的水泥臺(tái)座上,下墊面環(huán)境為人工塑料草皮。 實(shí)驗(yàn)現(xiàn)場(chǎng)如圖5 所示,溫度脈動(dòng)儀放置在天臺(tái)邊緣,四周開(kāi)闊無(wú)遮擋,無(wú)高熱輻射源或強(qiáng)電磁場(chǎng)輻射源,由于長(zhǎng)春冬季天氣寒冷,實(shí)驗(yàn)場(chǎng)地有積雪覆蓋。

圖5 溫度脈動(dòng)儀實(shí)驗(yàn)現(xiàn)場(chǎng)
實(shí)驗(yàn)結(jié)果如圖6 所示,溫度脈動(dòng)儀在觀測(cè)點(diǎn)成功繪制大氣折射率結(jié)構(gòu)常數(shù)在一整天的變化曲線。12 月23 日長(zhǎng)春地區(qū)的日出時(shí)間為7 點(diǎn)10分,日中時(shí)間為11 點(diǎn)37 分,日落時(shí)間為16 點(diǎn)05分。 在日出之前溫度脈動(dòng)量較低,大氣湍流較弱,大氣折射率結(jié)構(gòu)常數(shù)在10-14m-2/3附近波動(dòng),7點(diǎn)鐘日出以后,溫度脈動(dòng)量開(kāi)始增加,大氣折射率結(jié)構(gòu)常數(shù)開(kāi)始升高,在日中前的11 點(diǎn)附近達(dá)到一個(gè)峰值,最高達(dá)到5 × 10-13m-2/3,然后在日中時(shí)溫度脈動(dòng)量較為平穩(wěn),大氣折射率結(jié)構(gòu)常數(shù)有所回落,到10-13m-2/3附近波動(dòng),在日中過(guò)后13點(diǎn)30 分時(shí)又迎來(lái)一個(gè)回升,達(dá)到5 × 10-13m-2/3。 之后便逐漸降低,在日落以后大氣折射率結(jié)構(gòu)常數(shù)回到當(dāng)日低點(diǎn),在10-14m-2/3附近波動(dòng)。

圖6 大氣折射率結(jié)構(gòu)常數(shù)測(cè)量結(jié)果
3 結(jié)論
本文提出了一種使用卡爾曼濾波算法,提高溫度脈動(dòng)儀測(cè)量準(zhǔn)確性的方案。經(jīng)過(guò)卡爾曼濾波后溫度脈動(dòng)儀采集的電壓值更加平穩(wěn)準(zhǔn)確,設(shè)備的測(cè)量噪音能夠控制在0.001 K 以內(nèi),噪音對(duì)大氣折射率結(jié)構(gòu)常數(shù)的影響量級(jí)為10-18m-2/3,遠(yuǎn)低于正常測(cè)量的數(shù)據(jù),對(duì)大氣折射率結(jié)構(gòu)常數(shù)的測(cè)量影響極低,提高了溫度脈動(dòng)儀的測(cè)量準(zhǔn)確度。利用研制的溫度脈動(dòng)儀對(duì)長(zhǎng)春地區(qū)冬季的大氣湍流進(jìn)行全天監(jiān)測(cè),成功繪制大氣折射率結(jié)構(gòu)常數(shù)特性曲線,長(zhǎng)春冬季大氣折射率結(jié)構(gòu)常數(shù)在10-12m-2/3~10-15m-2/3之間波動(dòng),在日落后日出前,大氣湍流較弱,折射率結(jié)構(gòu)常數(shù)在10-14m-2/3附近波動(dòng),日出后受太陽(yáng)輻射影響,溫度脈動(dòng)量變大,光學(xué)湍流較強(qiáng),折射率結(jié)構(gòu)常數(shù)在10-13m-2/3附近波動(dòng),最高達(dá)到5 × 10-13m-2/3。全天變化趨勢(shì)與先前的研究結(jié)果[10-11]具有很好的一致性。
猜你喜歡
軍事文摘(2023年10期)2023-06-09 09:15:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
河北書(shū)畫(huà)研究(2016年2期)2016-08-24 02:14:50
新農(nóng)業(yè)(2016年18期)2016-08-16 03:28:27
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
電源技術(shù)(2016年9期)2016-02-27 09:05:39
電源技術(shù)(2015年1期)2015-08-22 11:16:28