基于三維激光點(diǎn)云的道路參數(shù)化建模方法
2024-01-08 10:42:16祖帥
城市勘測(cè) 2023年6期
關(guān)鍵詞:模型
祖帥
(福州市勘測(cè)院有限公司,福建 福州 350108)
0 引 言
近年來(lái),眾多城市開(kāi)始推進(jìn)新型城市基礎(chǔ)設(shè)施建設(shè),實(shí)施智能化市政基礎(chǔ)設(shè)施建設(shè)和改造。道路三維模型結(jié)合屬性信息可以在規(guī)、建、管全生命周期管理中發(fā)揮重要作用,是新城建的重要建設(shè)內(nèi)容,也是數(shù)字孿生城市和智慧交通建設(shè)的基礎(chǔ)數(shù)據(jù)[1]。
傳統(tǒng)道路三維建模主要是根據(jù)道路平面、縱斷面、橫斷面等資料,利用計(jì)算機(jī)手工構(gòu)建道路三維模型。隨著道路數(shù)據(jù)信息不斷豐富,道路三維建模方法也發(fā)生變化。李曉麗[1]等利用高精度矢量數(shù)據(jù)自動(dòng)構(gòu)建路面三維模型;湯圣君[2]等提出利用三維GIS數(shù)據(jù)實(shí)現(xiàn)道路參數(shù)化建模方法;高陽(yáng)[3]等通過(guò)點(diǎn)云掃描強(qiáng)度值與強(qiáng)度差值提取道路標(biāo)志線(xiàn)信息,創(chuàng)建道路三維模型;張慧智等[4]提出基于車(chē)載激光點(diǎn)云的三維道路精細(xì)化建模。
本文通過(guò)分析道路空間特征和數(shù)據(jù)結(jié)構(gòu),根據(jù)三維激光點(diǎn)云提取道路矢量和參數(shù)信息,對(duì)路面和地物建模進(jìn)行算法設(shè)計(jì),實(shí)現(xiàn)基于點(diǎn)云數(shù)據(jù)的道路路面和地物參數(shù)化三維建模。
1 道路三維模型數(shù)據(jù)結(jié)構(gòu)設(shè)計(jì)
從道路空間分布特征角度,道路由路面、標(biāo)線(xiàn)、設(shè)施、景觀(guān)綠化等要素構(gòu)成。考慮道路要素空間結(jié)構(gòu)、拓?fù)潢P(guān)系和幾何特征,本文將道路三維模型數(shù)據(jù)結(jié)構(gòu)分為點(diǎn)狀物和體狀物兩類(lèi)數(shù)據(jù)結(jié)構(gòu):空間體、空間點(diǎn),如圖1所示。

圖1 道路三維模型數(shù)據(jù)結(jié)構(gòu)
2 道路參數(shù)化建模原理
參數(shù)化建模是將三維模型不同構(gòu)件通過(guò)合理方式分離出來(lái),將幾何特征、位置特征等映射為變化量參數(shù)[5],通過(guò)控制參數(shù)實(shí)現(xiàn)模型大小、位置的變化。道路參數(shù)化建模可以通過(guò)建立道路模型庫(kù),用參數(shù)和算法驅(qū)動(dòng)模型庫(kù)自動(dòng)建模[6]。該方法借鑒了3DGIS和BIM兩類(lèi)數(shù)據(jù)模型的幾何、語(yǔ)義信息融合和數(shù)據(jù)集成[7]。
道路模型庫(kù)是參照BIM族庫(kù)的理念,采用構(gòu)件承載各類(lèi)幾何和非幾何信息的常用模型單元,如燈桿、樹(shù)木、支擋防護(hù)等地物,通過(guò)定義構(gòu)件參數(shù)信息建立起可用算法驅(qū)動(dòng)變化的道路模型庫(kù)[8-9]。
道路參數(shù)信息是通過(guò)提取道路的類(lèi)別信息、幾何信息、坐標(biāo)信息等,作為道路參數(shù)化建模的參數(shù)信息。例如,可根據(jù)道路直線(xiàn)、曲線(xiàn)要素提取關(guān)鍵位置參數(shù),用于路面平面參數(shù)化建模,結(jié)合道路表面高程信息、道路厚度信息,實(shí)現(xiàn)參數(shù)信息驅(qū)動(dòng)道路面層三維建模。同理,樹(shù)木、路燈、信號(hào)燈等點(diǎn)設(shè)施,可以直接根據(jù)類(lèi)別參數(shù)、幾何參數(shù)、坐標(biāo)參數(shù)等自動(dòng)化建模。
3 道路三維模型參數(shù)化建模實(shí)現(xiàn)
道路參數(shù)化三維建模流程如圖2所示。

圖2 道路參數(shù)化三維建模流程
3.1 道路參數(shù)信息獲取
道路參數(shù)信息采集可以利用傳統(tǒng)的測(cè)量技術(shù),如全站儀、GNSS+RTK等方式,也可以采用如無(wú)人機(jī)傾斜攝影測(cè)量、三維激光掃描等技術(shù)。相比其他測(cè)量手段,車(chē)載移動(dòng)三維激光掃描以全息采集的方式,有精度高、速度快、可視化效果好、易于解析等優(yōu)點(diǎn),是新型基礎(chǔ)測(cè)繪典型的數(shù)據(jù)采集技術(shù)手段。車(chē)載激光移動(dòng)測(cè)量系統(tǒng)是以小型汽車(chē)/摩托車(chē)為載體、多傳感器集成的測(cè)量系統(tǒng)。一般由三維激光掃描儀、全球定位導(dǎo)航系統(tǒng)(GNSS)、慣性導(dǎo)航系統(tǒng)(INS)、CCD相機(jī)、里程計(jì)(DMI)、時(shí)間同步控制器等傳感器組合構(gòu)成[3]。
面向三維建模的道路參數(shù)信息獲取,首先需要對(duì)點(diǎn)云數(shù)據(jù)經(jīng)過(guò)點(diǎn)云數(shù)據(jù)解析、導(dǎo)航數(shù)據(jù)結(jié)算、點(diǎn)云濾波、去噪、抽稀、分類(lèi)、渲染等步驟,獲取三維真彩點(diǎn)云[10],之后在采集軟件中實(shí)現(xiàn)半自動(dòng)化提取道路矢量信息、位置參數(shù)、幾何參數(shù)、紋理等信息。
3.2 道路模型庫(kù)建設(shè)
道路模型庫(kù)是通過(guò)一系列參數(shù)定義三維模型,參數(shù)保存了地物類(lèi)別信息、幾何信息和坐標(biāo)信息[11]。因此,在制作地物模型庫(kù)時(shí),需要針對(duì)模型相應(yīng)的使用目標(biāo),在制作過(guò)程中設(shè)置相應(yīng)的參數(shù)信息,以便在之后建模過(guò)程中實(shí)現(xiàn)參數(shù)驅(qū)動(dòng)建模,從而提高建模和應(yīng)用的效率[12]。
根據(jù)上述道路地物建模規(guī)則和建模對(duì)象的實(shí)際形狀,利用Revit軟件和二次開(kāi)發(fā)工具設(shè)計(jì)并創(chuàng)建了道路常用地物標(biāo)準(zhǔn)模型庫(kù),模型的長(zhǎng)、寬、高、位置和方向受控于所創(chuàng)建的幾何參數(shù),可根據(jù)實(shí)際情況改變;模型紋理采用自制貼圖,可在常用三維建模軟件和平臺(tái)中無(wú)丟失流轉(zhuǎn),如圖3、圖4所示。

圖3 典型地物模型庫(kù)示意

圖4 典型地物模型參數(shù)示意
3.3 路面參數(shù)化建模算法
道路路面是由一系列關(guān)鍵節(jié)點(diǎn)連接而成的連續(xù)實(shí)體,關(guān)鍵節(jié)點(diǎn)直接控制著道路的形狀、位置,是三維重建和空間分析的基本要素[13-14],通過(guò)提取道路邊線(xiàn)關(guān)鍵節(jié)點(diǎn),設(shè)計(jì)連續(xù)規(guī)則的三角網(wǎng)算法,可以滿(mǎn)足路面快速建模。根據(jù)三維激光點(diǎn)云數(shù)據(jù)可以提取道路直線(xiàn)、曲線(xiàn)要素,并且在直/曲線(xiàn)要素的基礎(chǔ)上按照規(guī)則的間距加密三維特征點(diǎn)。在Microstation V8軟件中通過(guò)約定三角網(wǎng)底邊關(guān)鍵點(diǎn)參數(shù)、設(shè)計(jì)規(guī)則三角網(wǎng)算法,自動(dòng)構(gòu)建連續(xù)規(guī)則三角網(wǎng),在此基礎(chǔ)上利用3DMAX/Revit軟件生成表面模型,紋理貼圖后生成路面三維模型。
例如,Z(1)、Z(2)…Z(n)點(diǎn)連接成道路直線(xiàn),直緩點(diǎn)ZH、緩曲點(diǎn)HQ、曲中點(diǎn)QZ、曲緩點(diǎn)QH、緩直點(diǎn)HZ等參數(shù)構(gòu)成道路的曲線(xiàn)要素,根據(jù)定義規(guī)則間隔的直線(xiàn)要素和曲線(xiàn)要素,在Microstation V8軟件中利用三角網(wǎng)算法,自動(dòng)構(gòu)建底邊長(zhǎng)相同的連續(xù)規(guī)則三角網(wǎng)、生成DSM,進(jìn)而在3DMAX/Revit軟件中經(jīng)紋理參數(shù)識(shí)別、紋理映射后快速實(shí)現(xiàn)道路路面的三維建模,如圖5所示。
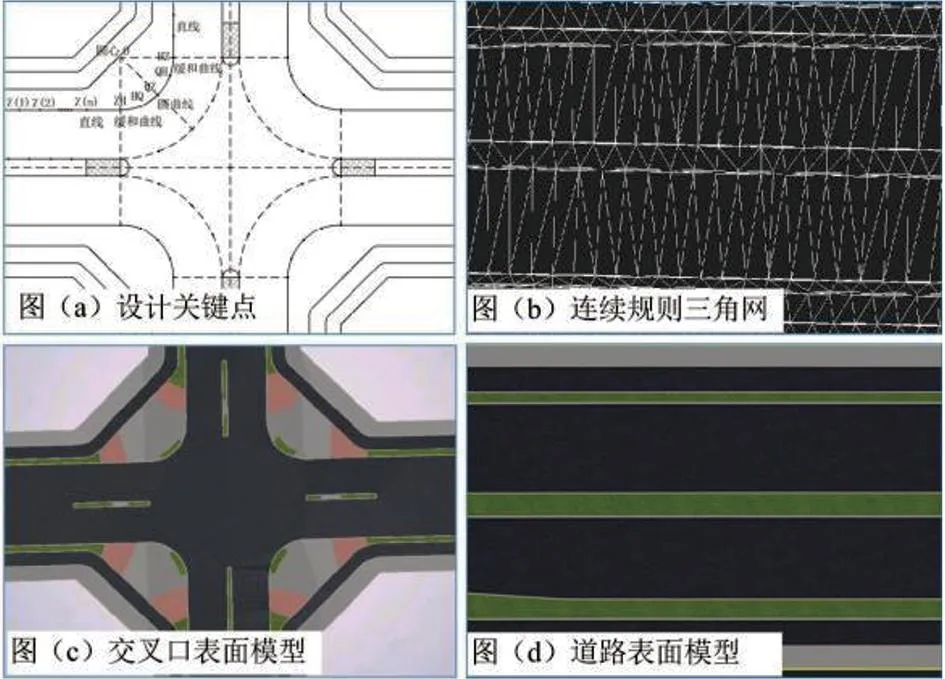
圖5 連續(xù)規(guī)則三角網(wǎng)算法三維建模示意
3.4 地物參數(shù)化建模算法
道路標(biāo)線(xiàn)為面狀矢量數(shù)據(jù),包括長(zhǎng)標(biāo)線(xiàn)、短標(biāo)線(xiàn)及方向指示線(xiàn)[15]。在二維平面中,路面長(zhǎng)標(biāo)線(xiàn)、短標(biāo)線(xiàn)及方向指示線(xiàn)為幾何圖形,中心點(diǎn)為圖形幾何中心,可以根據(jù)點(diǎn)云數(shù)據(jù)獲取的標(biāo)線(xiàn)幾何中心坐標(biāo)信息、方向信息、類(lèi)別信息,利用放樣算法實(shí)現(xiàn)批量自動(dòng)建模[16],并運(yùn)用投影原理將道路標(biāo)線(xiàn)投射到路面模型上。
道路路燈、樹(shù)木等點(diǎn)狀地物,可以根據(jù)點(diǎn)云數(shù)據(jù)獲取的其地面三維坐標(biāo)、幾何信息、類(lèi)別信息等,利用放樣算法讀取模型庫(kù)實(shí)現(xiàn)批量自動(dòng)建模,并運(yùn)用投影原理將模型投射到路面模型上。
4 試驗(yàn)及精度分析
本文選取某路段長(zhǎng)約1 km車(chē)載三維激光點(diǎn)云數(shù)據(jù)進(jìn)行實(shí)驗(yàn),驗(yàn)證基于三維激光點(diǎn)云道路參數(shù)化三維建模的效果和精度。
首先利用點(diǎn)云信息采集軟件,獲取道路矢量數(shù)據(jù)和參數(shù)信息;其次利用Revit軟件建立道路參數(shù)化模型庫(kù);然后利用連續(xù)規(guī)則三角網(wǎng)算法結(jié)合參數(shù)信息構(gòu)建路面三維模型、利用放樣算法結(jié)合參數(shù)信息批量放置點(diǎn)狀地物模型;最后將重建后的點(diǎn)狀地物模型利用投影原理映射到路面,實(shí)現(xiàn)道路三維模型的參數(shù)化建模,局部效果如圖6所示。

圖6 試驗(yàn)成果局部效果
在精度分析上,分別從點(diǎn)云和模型成果上選取地面關(guān)鍵位置平面坐標(biāo)和高程,例如分車(chē)帶、人行道、車(chē)行道特征點(diǎn),開(kāi)展誤差分析評(píng)定。從表1中可以看出:在構(gòu)建路面模型三角網(wǎng)底邊參數(shù)取 1.5 m時(shí),特征點(diǎn)處模型成果平面坐標(biāo)中誤差約 13 cm,高程中誤差約 10 cm,可以表明基于三維激光點(diǎn)云的道路參數(shù)化建模精度很高,滿(mǎn)足厘米級(jí)工程應(yīng)用需要。

表1 試驗(yàn)成果精度分析
5 結(jié) 論
通過(guò)對(duì)道路數(shù)據(jù)結(jié)構(gòu)和參數(shù)化建模規(guī)則的研究,設(shè)計(jì)并創(chuàng)建了帶參數(shù)的模型庫(kù)、連續(xù)規(guī)則三角網(wǎng)算法、模型放樣算法,結(jié)合建模軟件,形成了一套點(diǎn)云數(shù)據(jù)的道路參數(shù)化三維建模技術(shù)工藝。試驗(yàn)表明,該方法可以基于三維激光點(diǎn)云數(shù)據(jù),實(shí)現(xiàn)道路的高精度、參數(shù)化建模。本文所設(shè)計(jì)的道路建模方法結(jié)合了BIM建模的理念,能實(shí)現(xiàn)模型與屬性合一的建模效果,可以根據(jù)需要,在道路工程規(guī)、建、管全生命周期管理中做進(jìn)一步應(yīng)用。
猜你喜歡
童話(huà)王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
