基于虛擬編組的信號技術研究
2024-01-08 07:45:50杜建新陳麗君丁建莉劉禹彤
電氣化鐵道 2023年6期
杜建新,陳麗君,丁建莉,劉禹彤
0 引言
列車虛擬編組的概念最早在歐洲被提出和研究。2019年,CAF公司、龐巴迪公司、西門子公司在Shift2Rail項目中通過合作的方式,首次在有軌電車上測試和驗證了虛擬聯掛方案[1]。近些年虛擬編組逐漸成為國內行車控制領域的研究熱點之一,筆者認為其被討論研究主要有兩點原因:一方面道路交通的駕駛體驗和汽車無人駕駛技術的進步使虛擬編組的概念在感性上容易被接受;另一方面其技術愿景可以顯著縮短行車追蹤間隔并帶來行車效率的提升。
在此背景下,本文從信號專業的角度研究虛擬編組的技術特點,分析當前信號控制特點與虛擬編組的關系,列舉技術應用時可能的風險與挑戰,并進行總結與展望。
1 虛擬編組技術特點
虛擬編組技術主要應用于前后列車追蹤、協同運行的場景中,借助先進的無線通信、傳感和控制等技術,基于車與車通信從相鄰列車獲得列車位置、速度、加速度等關鍵信息,協同控制相鄰列車間的運行速度和間隔距離,形成穩定車隊整體在統一的授權防護下運行,共同完成列車控制與調度組織。列車編組運行時的核心功能原理歸納為以下幾點:
(1)車隊中的車載OBC(車載控制器)設備之間通過交互共享軌道資源;直至車隊通過并不再使用軌道資源后,軌道資源才被釋放給其他所需列車/車隊。
(2)軌旁OC(地面目標控制器)為車隊預留道岔、站臺門等軌旁設備的控制權并提供實時狀態。
(3)車隊中的前后列車形成虛擬編組,列車之間未通過物理車鉤進行電氣連接,但前后兩列車通過速度、距離控制,對牽引制動的控制形成協作平衡的動態追蹤關系。
(4)符合“軟撞墻”安全制動模型原則下,車載OBC結合前車速度、距離及制動性能關系,為當前列車計算移動授權并控制牽引制動。通過行車資源的共享,虛擬編組的前后列車移動授權是可以重疊的。
2 虛擬編組技術實現探究
從上述虛擬編組技術的內涵分析,該相關信號控制技術實際并未脫離信號控制防護的基本原理,而是在現有技術上進行了優化調整。結合虛擬編組的技術實現進行分解,該技術的優化調整內涵主要體現在更進一步的間隔防護、行車協同控制、統一地面防護、編隊調度組織4個方面。
2.1 間隔防護
信號系統發展過程經歷了電話閉塞、固定閉塞、準移動閉塞及移動閉塞[2]等不同發展時期和階段,其基本原理均是結合時間、空間特性保護軌道上的列車以避免沖撞風險。
一般說來,既有信號系統均采用絕對制動距離(ABD)[3]原則進行安全防護,而虛擬編組的兩車之間采用“軟撞墻”(或稱為相對制動距離RBD)的安全制動模型。ABD原則認為前車車尾是零速限制點,即需要后車根據自身的緊急制動保障率減速停車后可確保不會越過該點;而RBD原則認為,如果前車處于運動狀態時不會立即變為靜止,因此可以對前車按照其最大制動減速度估算運行軌跡,對后車按照自身的緊急制動保障率估算軌跡,兩條軌跡在同一時間點不相交即不會發生碰撞,從而保證安全。因此只要前車處于運動狀態并采用相對制動距離原則后,后車允許移動的范圍更遠(越過前車的靜態位置包絡),列車之間將比絕對制動距離原則追蹤得更緊密。
ABD原則下,同一時刻不同列車的動態包絡不應重疊;RBD原則下突破了這一限制,但在當前及后續時刻不同列車的靜態包絡不會重疊,列車之間也就不會沖撞。相關追蹤效果可參見圖1,設后車采取緊急制動的最大制動距離為D后max,前車突然制動停車的最小制動距離為D前min,追蹤距離為D。根據ABD原則,兩車追蹤時一般需滿足:
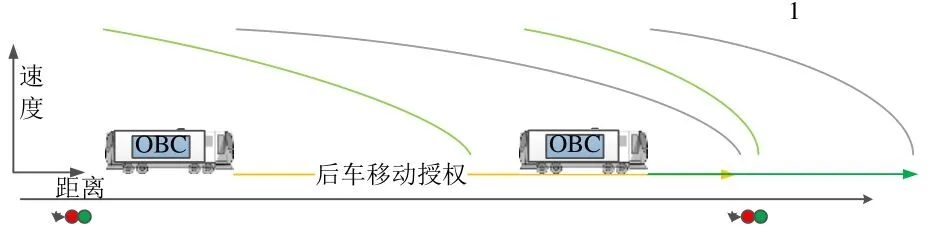
圖1 RBD追蹤效果
RBD原則是虛擬編組行車間隔防護的核心,也是虛擬編組縮短行車間隔的基礎,其功能實現依賴于通信技術、傳感感知技術、“車-車通信”[4]等技術基礎,特別是需要行車控制系統對測速測距、制動邊界、安全場景進行精確計算和有效識別。
2.2 行車協同控制
不同于道路交通公共開放的道路環境,軌道交通具有線路相對固定、裝備相對統一、信息交互更為充分的特點,在此條件下軌道交通應用協同控制的自動駕駛技術才能或更能體現虛擬編組技術的性能優點,同時考慮運營操作習慣等因素,軌道交通不宜在采用虛擬編組時使用人工駕駛。
基于RBD間隔防護原則,形成虛擬編組的列車之間存在實時的關鍵數據交換,包括上文提及的RBD間隔防護基礎所述相關的列車位置、速度、緊急制動狀態、緊急制動率邊界等狀態;為了在安全行車防護范圍內使追蹤時的運行表現更優,也包括精確速度、ATO級位、牽引制動控制等運行信息。在此數據交換的基礎上,車隊根據頭車行車狀態數據控制后車的運行,后車在RBD原則下自行計算運行包絡線,結合運行圖自主決定加入/脫離編隊。
以傳統信號系統ATO控制的思路來看,后車可以以RBD原則下的授權距離為參照,將速度貼近并控制在EB觸發速度下。因為前車正在移動,后車的授權終點在下一周期也隨之移動,后車的運行控制表現為將速度控制在前車移動幅度(也就是前車速度)的相對穩態。此外,該控制思路還應考慮前車加減速、安全工況變化帶來的擾動,以及避免車隊對擾動層層傳遞的放大。
另一種思路將虛擬編組后的車隊作為一個整體控制:雖然車隊中的不同個體具有各自獨立的ATO控制系統,但以分布式的方式統籌計算、協商車隊整體系統目標和個體的任務分配。車路協同、模型預測控制、多智能體系統任務規劃[5]等控制算法在相關行業、相關技術已有大量應用和研究成果,不再贅述,軌道交通行業通過吸收轉化可形成特有工程應用特點。
此外,虛擬編組列車之間雖然不設置傳統意義的有線列車控制網絡用于牽引制動分配,但因無線通信技術的發展,通過高速穩定的無線網傳輸也能構建出牽引制動底層協作的通信網絡,相應的信號系統也需要結合底層控制特點進行適配性調整。
2.3 統一地面防護
行車過程中車地控制是同時存在的,統一的地面防護在虛擬編組系統運行同樣必不可少。基于獨立不重疊的動態包絡,現有信號系統中同一時刻的某個地面元素實際只被一列車使用,如鎖閉在行車方向的道岔;但在虛擬編組系統中,同一時刻某個地面元素需要能夠被不同列車重疊的動態包絡占有,即被車隊共有。這種共享預留方式在“車-車通信”的分布式控制系統中已有體現[6],如不同列車可同時分別向OC預留道岔,若命令不沖突,多個列車分別對道岔的鎖閉結果可同時存在。也即若編組列車均以同方向通過該道岔,則中間過程道岔不解鎖,此時道岔被車隊或車隊中的多個列車同時預留在同一位置。
以地面為主的CBTC控制系統中,相同路徑的不同列車不能共用同一授權;“車-車通信”系統雖然以列車為主進行防護計算,但列車之間各自獨立防護下確保安全行車間隔[7],也不需要共用行車路權;虛擬編組系統中完全可以將編組的物理列車之間視為“車鉤相連”,取決于列車之間的架構設計和數據流關系,同時需考慮行車組織是否將車隊進行統籌設計后車隊允許共用一個進路授權。
虛擬編組縮短了列車通過時的行車間隔,但在前車靜止(如站停)時不體現RBD原則的優勢,因此線路上需要有對應的站臺或側線設計和與之配合的地面防護,提供與通過間隔匹配的多車停站間隔。
RBD原則不能解決分歧道岔的共享問題,畢竟前車“軟墻”越過了道岔而靜態包絡實際未通過道岔時,道岔位置不在后車所需通過路徑上,后車的移動授權也無法越過道岔,也就是說一段可被運用虛擬編組的線路兩端道岔處可能會成為提升行車效率的瓶頸。提供分析這一問題的兩個思路:一是在列車接近道岔前降速,可以縮短兩車分離聚合的間隔,并與追蹤間隔匹配;二是研制與虛擬編組技術匹配的新型道岔,道岔具有類似擠岔通過特性,或具備利用編組的前后兩車靜態包絡前后占用道岔的間隙確保道岔安全移動到位的新型特性。
2.4 編隊調度組織
對比鐵路系統廣泛應用的實體編組技術[8],虛擬編組系統在調度組織方面具有編組配置更為靈活的特點,這提高了運輸組織的自由度,也提高了線路的運輸及通過能力[5]。例如,一個長編組列車才能完成的任務,在虛擬編組系統中可以由一個虛擬車隊完成,系統可呈現為統一編號、統一控制操作的整體,方便行車組織和調度操作;又如,線網運行業務繁忙的干線上,調度通過設置一段線路的間隔方式,允許不同列車以虛擬編組和不同車次的方式提高該段線路的運行效率,系統相應地生成與之匹配的行車計劃;再如,遇到突發客流、臨時任務時,調度員可以安排列車加入到現有列車之間,形成虛擬編組關系行車。在分歧處,除需要道岔的安全控制,虛擬編組的車隊也在此處根據計劃解編為多個車隊/列車個體。
因為虛擬編組縮短了行車間隔,一些原本受限的運行組織方式可能更易被實現,如小車快跑、網絡化運營[9]、定制化運營等行車組織方式,此時需要相應的ATS、ATO等信號子系統功能與之匹配。
在城市軌道交通一些客流時空分布不均的具體應用場景,虛擬編組技術可根據客流情況在線動態調整列車編組,相較實體編組更為高效和經濟,可實現車輛等資源的高效利用和客流-車流的精確匹配,實現城市軌道交通節能降碳增效。
3 安全風險與挑戰
對比采用絕對制動距離原則進行防護的傳統信號防護,應用虛擬編組技術時系統邊界條件的限制更多,結合當下應用場景對虛擬編組技術的實現提出以下幾點思考:
(1)采用相對制動距離RBD原則后,前后車間隔更小,對于異常情況的處理需要謹慎分析。例如雨雪天氣引起后車打滑,列車將很難維持足夠的減速能力,虛擬編組的追尾風險概率將增大。此外,按照相對制動距離原則,常規工況下前車不會超過設計的最大減速度,若前車發生碰撞、脫軌等危害極大的事故時(小概率但可能發生),前車減速度可能會超過設計范疇,后車可能會因為沒有足夠制動距離而產生沖撞,加重損失。
(2)若為防護站臺的靜止列車設計了虛擬編組的兩車之間存在吸能裝置(如自動車鉤),還需考慮可能撞擊下發生列車位移對乘客乘降帶來的次生風險。
(3)虛擬編組列車在道岔處分離聚合時,若將道岔危險區域也進行“軟撞墻”防護,則對道岔設計提出更高的要求。
(4)虛擬編組在聯掛、摘解[3]過程中全部由系統控制實現,過程中的控制安全需進行額外的安全防護設計。
(5)根據虛擬編組列控系統的實現架構,安全設計時需考慮各子系統之間信息傳輸延遲、錯誤指令、設備故障或性能降低等方面帶來的危害。
4 結語
本文從信號技術角度研究了虛擬編組技術,進行了一些思考,也列舉了部分未形成共識的問題。信號技術需要發展、正在發展,一項新技術的應用應進行科學系統地研究才能助力行業穩定健康發展。隨著行業對新技術的研究突破,我國軌道交通的運輸服務質量和運輸效率將得到大幅提升。