光伏并網逆變器分數階滑模二自由度內模控制
2024-01-08 07:45:52張冬冬葛孟超李保宗于培培
電氣化鐵道 2023年6期
關鍵詞:系統(tǒng)
張冬冬,葛孟超,李保宗,于培培,李 達,逯 哲
0 引言
太陽能具有清潔無污染、可再生等優(yōu)勢,因此光伏發(fā)電技術成為直流微電網、孤島發(fā)電、衛(wèi)星通信、風光互補電站、城市軌道交通等領域的研究熱點[1-2]。并網逆變器是光伏發(fā)電系統(tǒng)與電網連接的關鍵設備,其控制性能直接影響電網的電能質量。光伏并網系統(tǒng)具有明顯的非線性[3-4],為提高系統(tǒng)動態(tài)性能和抗擾動能力,文獻[5]在傳統(tǒng)PI控制中加入滑模控制,提高系統(tǒng)的動態(tài)響應,但PI參數整定復雜且存在系統(tǒng)抖振;文獻[6-8]采用高階滑模控制算法,雖然在一定程度上改善了系統(tǒng)抖振問題,但高階滑模控制算法復雜,控制律設計困難;文獻[9-10]引入一自由度內模控制策略,該控制策略具有結構簡單、整定參數較少的優(yōu)勢,解決了PI控制參數整定復雜的問題,但無法兼顧系統(tǒng)的跟隨性和抗干擾性。相對于傳統(tǒng)一自由度控制結構,二自由度內模控制可同時實現跟蹤特性和干擾抑制特性的獨立調節(jié)[11-12],分數階滑模控制可有效削減系統(tǒng)抖振[13],二者結合,將有效改善系統(tǒng)內外環(huán)控制的魯棒性和抗干擾能力。
本文在深入研究三相PWM逆變器物理參量之間動態(tài)關系的基礎上,在傳統(tǒng)滑模控制中通過引入分數階微積分算子,電壓外環(huán)采用分數階滑模控制方法,電流內環(huán)采用二自由度內模控制方法,提出一種分數階滑模二自由度內模控制新方法,并對并網跟隨性和電壓暫升情況下進行對比測試驗證。結果表明,相對于傳統(tǒng)滑模一自由內模控制方法,新控制算法可快速跟隨網側電壓目標值,削弱系統(tǒng)抖振,提高系統(tǒng)的魯棒性。
1 三相PWM光伏逆變器控制模型分析
三相PWM光伏逆變器拓撲結構如圖1所示。

圖1 三相光伏逆變器拓撲結構
圖中:udc為逆變器輸入電壓;ipv為光伏陣列輸出電流;iin為逆變器輸入電流;uka、ukb、ukc為逆變器輸出電壓;ia、ib、ic為逆變器輸出相電流;ea、eb、ec為電網電壓;L為濾波電感;R為系統(tǒng)及濾波電感電阻;C為直流側穩(wěn)壓電容。
三相PWM光伏逆變器在dq坐標軸下的數學模型表示為
其中:ukd=sdudc為d軸控制輸入,ukq=squdc為q軸控制輸入,sd、sq為開關函數;w為交流電網頻率;ed、eq為電網電壓d、q軸分量;id、iq為電網電流d、q軸分量。
忽略濾波電感L阻值和開關損耗,PWM逆變器直流輸入功率和交流輸出功率滿足
當輸出無功電流為0時,可得
根據電壓定向矢量控制原理設計分數階滑模控制器輸入為電壓跟蹤誤差,輸出項為電流內環(huán)d軸參考值。
將edq看作干擾信號,由式(1)、式(2)可得內環(huán)電流子系統(tǒng)模型為
2 分數階滑模二自由度內模控制實現
式中:D-α為分數階積分算子,α為分數階積分算子的階數,0<α<1;c1為正定調整參數。
對式(8)求導可得
選擇指數趨近律為
式中:ε>0,k>0。
由式(9)~式(11)可得電流內環(huán)參考值為
由內模控制器原理可知,二自由度內模控制系統(tǒng)輸出為
式中:R(s)為系統(tǒng)輸入;Y(s)為系統(tǒng)輸出;和為二自由度內模控制器;G(s)為實際被控對象;為被控對象數學模型;D(s)為擾動。內模控制器用于跟蹤目標信號,用于增強抗干擾能力和實現主動解耦。
由式(6)、式(7)可知:
為保證內模控制器的可實現性,提高系統(tǒng)穩(wěn)定性和魯棒性[14],引入低通濾波器L1(s)。由于PWM逆變器的開關頻率為10 kHz,電流內環(huán)可看作一階慣性系統(tǒng),內模控制器為
將式(17)、式(18)代入式(14)得
通過調節(jié)系統(tǒng)參數α1、α2可實現無靜差跟蹤,增強系統(tǒng)抗干擾能力。電流內環(huán)二自由度內模控制原理如圖2所示。
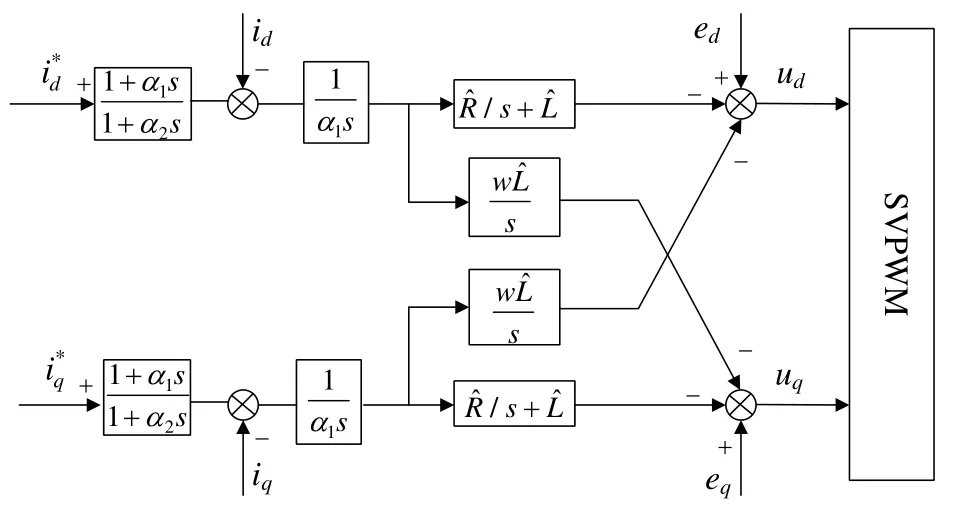
圖2 電流內環(huán)二自由度內模控制原理
光伏并網逆變器分數階滑模二自由度內模控制原理如圖3所示。
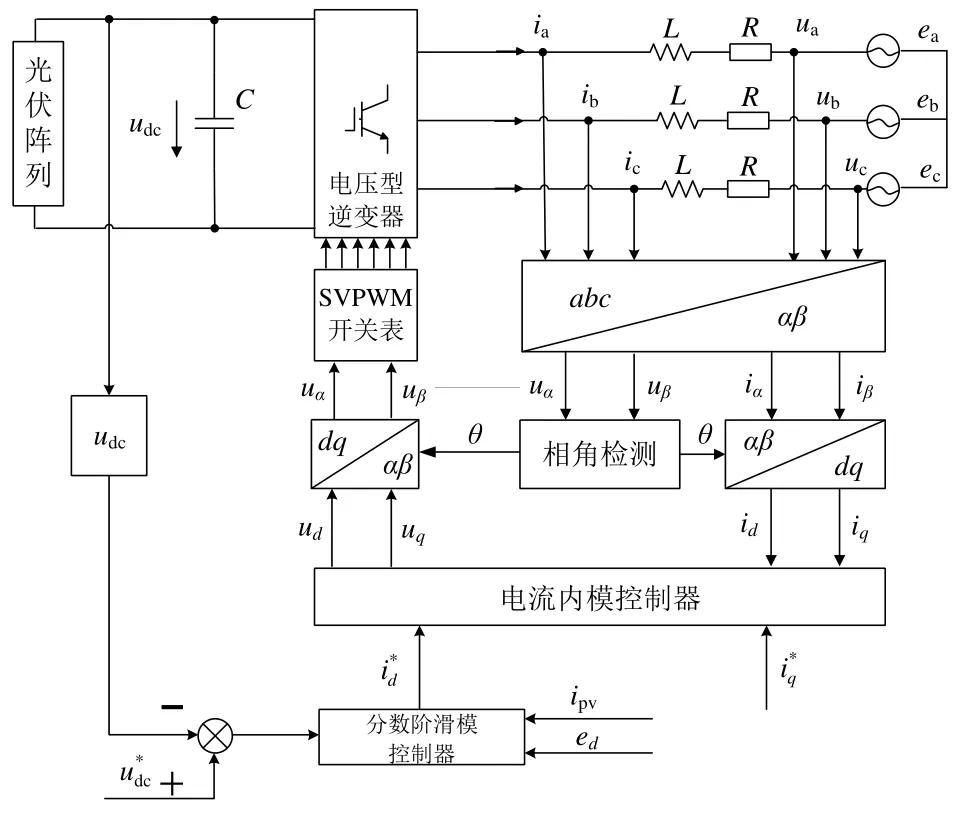
圖3 分數階滑模二自由度內模控制原理
三相靜止坐標系下的電壓ua、ub、uc和電流ia、ib、ic經過坐標變換,轉換為αβ坐標系下的電壓uα、uβ和電流iα、iβ。通過磁相角檢測計算出變換角θ,根據iα、iβ和θ,得到dq坐標系下id、iq。外環(huán)控制系統(tǒng)根據式(12)得出電流內環(huán)控制系統(tǒng)目標值,電流內環(huán)控制系統(tǒng)依據式(17)、式(18)求得控制量ud、uq,最終通過dq-αβ坐標變換得到整流器各相開關信號,實現對系統(tǒng)的穩(wěn)定控制。
3 仿真分析
為驗證分數階滑模二自由度內模控制策略的可行性,搭建系統(tǒng)仿真模型,與傳統(tǒng)整數階滑模一自由度內模控制算法進行對比分析,系統(tǒng)相關參數見表1。
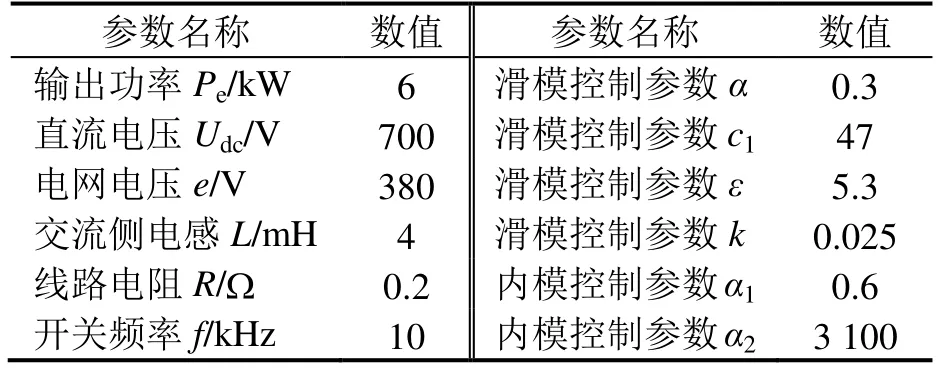
表1 系統(tǒng)相關參數
3.1 并網跟隨性測試
兩種控制算法并網跟隨性測試仿真結果分別如圖4、圖5所示。
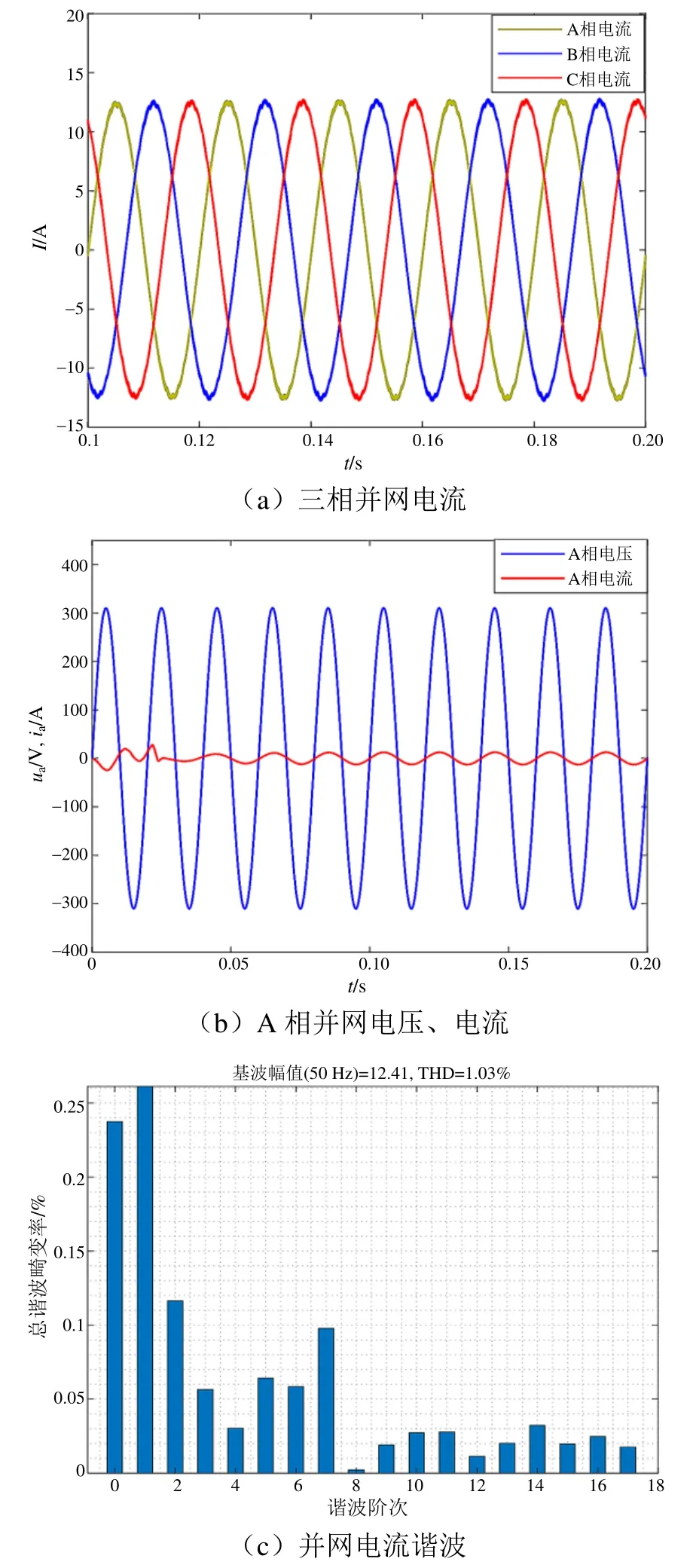
圖5 分數階滑模二自由度內模控制仿真結果
對比圖4、圖5可知,兩種控制算法均能實現單位功率因數運行,采用分數階滑模二自由度內模控制,三相并網電流脈動明顯改善,能快速跟隨目標值且超調較小,畸變率相較于整數階滑模一自由度內模控制降低0.96%,驗證了該控制方法可快速準確跟隨電網,改善并網電流脈動,降低諧波含量。
3.2 并網電壓暫升擾動對比測試
在0.3 s時,并網電壓由380 V上升至400 V,兩種控制算法仿真結果如圖6、圖7所示。
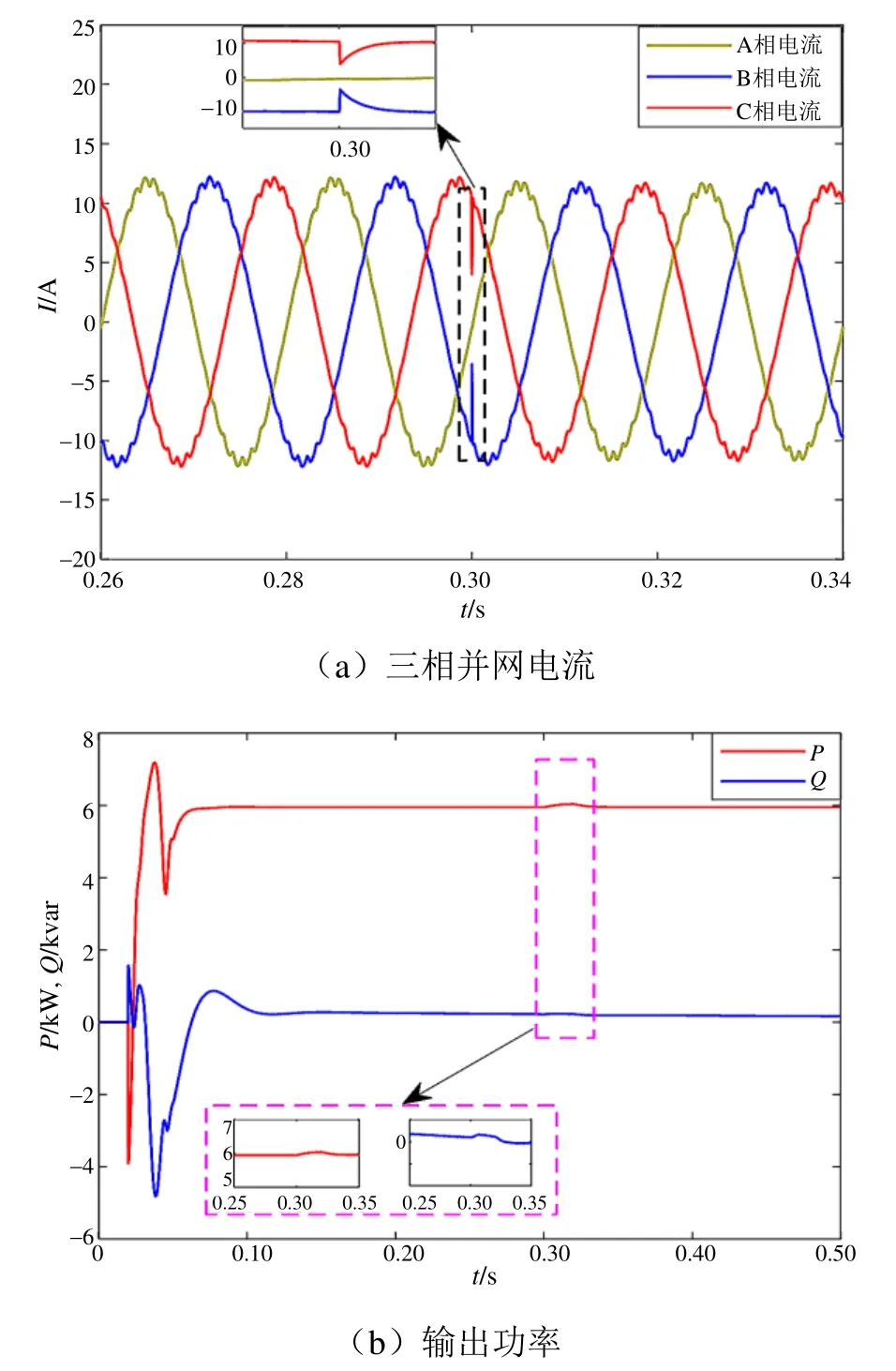
圖6 整數階滑模一自由度內模控制仿真
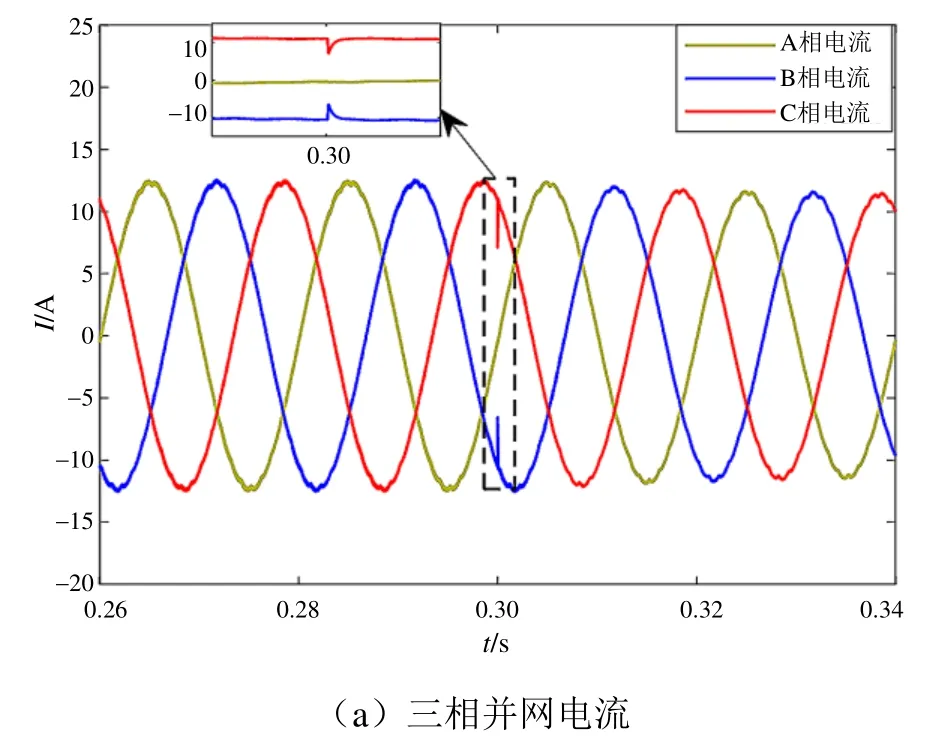
圖7 分數階滑模二自由度內模控制仿真結果
由圖6、圖7可知,在并網電壓暫升情況下,采用分數階滑模二自由度內模控制,輸出功率幾乎不受影響,并網電流畸變明顯減小,僅需0.02 s即可達到新的穩(wěn)定狀態(tài)。由此可知,新控制方法具有較強的抗干擾能力和良好的魯棒性。
4 結語
為抑制整數階滑模控制存在抖振,改善一自由度內模控制無法兼顧系統(tǒng)跟隨性和抗干擾性的局限性,通過引入分數階微積分算子和二自由度內模控制算法,提出光伏并網逆變器分數階滑模二自由度內模控制新方法。為驗證新控制方法的可行性和高效性,分別進行了并網跟隨性和電壓暫升擾動情況下的對比仿真驗證。仿真結果表明,相對于傳統(tǒng)整數階滑模一自由度內模控制方法,新方法能準確快速實現電網電壓的跟蹤,有效改善并網電流脈動,降低諧波含量,增強系統(tǒng)的抗干擾能力,對提升光伏并網系統(tǒng)魯棒穩(wěn)定控制性能具有重要意義。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32