電控正流量挖掘機(jī)分階段控制技術(shù)研究
2024-01-08 00:53:08魏森森杜常清徐玉兵
工程設(shè)計(jì)學(xué)報 2023年6期
關(guān)鍵詞:發(fā)動機(jī)
魏森森,杜常清,,鄒 斌,徐玉兵
(1. 武漢理工大學(xué) 汽車工程學(xué)院,湖北 武漢 430070;2. 武漢理工大學(xué) 現(xiàn)代汽車零部件技術(shù)湖北省重點(diǎn)實(shí)驗(yàn)室,湖北 武漢 430070)
液壓挖掘機(jī)作為一種多功能的工程機(jī)械,因能在惡劣的環(huán)境中連續(xù)工作,被廣泛應(yīng)用于工程建設(shè)。自挖掘機(jī)問世以來,其工作效率不高一直是科研人員想攻堅(jiān)的難題。現(xiàn)階段,在挖掘機(jī)工作時,僅有不到一半的發(fā)動機(jī)輸出功率轉(zhuǎn)化為有用功,其余大部分在傳遞過程中以熱能和勢能的形式損失了[1-2]。
挖掘機(jī)在工作過程中主要通過液壓油缸內(nèi)液壓油的體積變化來實(shí)現(xiàn)液壓能與機(jī)械能之間的相互轉(zhuǎn)化,故其液壓系統(tǒng)主要以流量控制為主[3]。目前,國內(nèi)外廣泛應(yīng)用的流量控制方式包括負(fù)載敏感控制、正流量控制和負(fù)流量控制,這3種流量控制方式的性能對比如表1所示[4]。在國內(nèi),大多數(shù)挖掘機(jī)采用負(fù)流量控制方式。雖然負(fù)流量控制在節(jié)能和穩(wěn)定性方面表現(xiàn)優(yōu)異,但是響應(yīng)速度較慢。為此,本文對挖掘機(jī)的液壓系統(tǒng)采用正流量控制方式[5]。
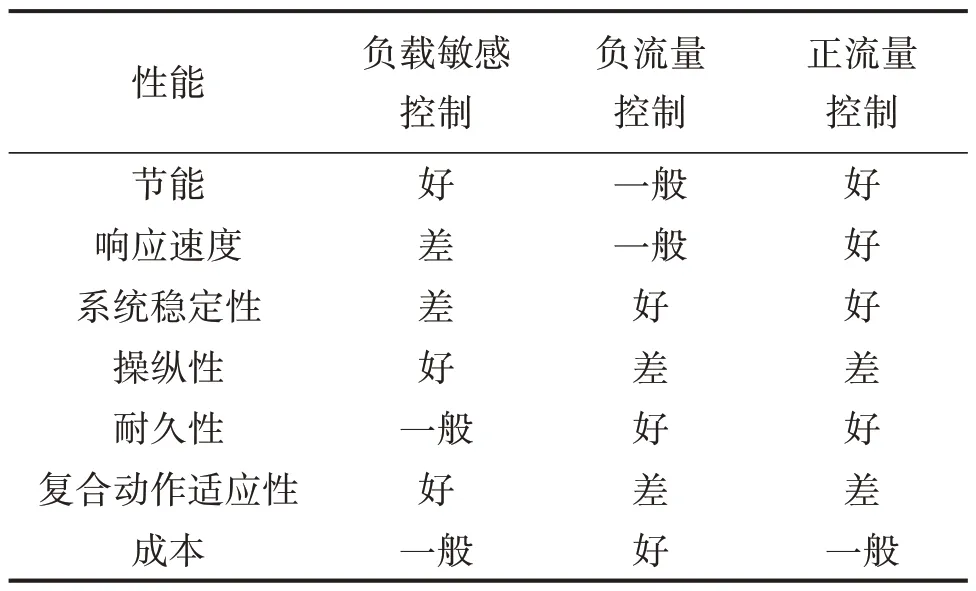
表1 不同流量控制方式的性能對比Table 1 Performance comparison of different flow control methods
除了液壓系統(tǒng)的流量控制方式外,發(fā)動機(jī)的工作模式也是制約挖掘機(jī)工作效率的重要因素。目前,國內(nèi)大部分挖掘機(jī)采用分工況控制方式[6]:將發(fā)動機(jī)的工作模式分為重負(fù)荷模式、標(biāo)準(zhǔn)模式和普通模式,每種工作模式下設(shè)有多個擋位供駕駛員選擇[7]。劉順安等人[8]采用分工況轉(zhuǎn)速感應(yīng)控制來調(diào)節(jié)變量泵的排量,以穩(wěn)定挖掘機(jī)中發(fā)動機(jī)的轉(zhuǎn)速;何清華等人[9]提出將變功率和恒功率控制策略相結(jié)合,實(shí)現(xiàn)了發(fā)動機(jī)-變量泵-負(fù)載的功率匹配。但是,上述方法忽略了2個重要問題[10]:1)分工況控制要求駕駛員有一定的操作經(jīng)驗(yàn),能夠根據(jù)實(shí)際情況合理地選擇發(fā)動機(jī)的工作模式;2)忽略了挖掘機(jī)在執(zhí)行不同動作時所需的功率是變化的[11]。高宇等人[12]雖在此基礎(chǔ)上提出了挖掘機(jī)的分階段控制方式,但未涉及如何識別挖掘機(jī)的不同作業(yè)階段。
基于挖掘機(jī)負(fù)流量控制和分工況控制的不足[13],筆者以某企業(yè)生產(chǎn)的正流量挖掘機(jī)為研究對象,采用分階段控制方式,基于AMESim和Simulink軟件搭建該挖掘機(jī)的聯(lián)合仿真模型,并通過聯(lián)合仿真和實(shí)車實(shí)驗(yàn)來驗(yàn)證所提出的控制策略的有效性。
1 電控正流量挖掘機(jī)分階段控制的特點(diǎn)
1.1 電控正流量液壓系統(tǒng)特點(diǎn)
正流量控制的特點(diǎn)是“所供即所需”,即變量泵的排量正好是執(zhí)行機(jī)構(gòu)需要的[14]。為滿足這一特性,正流量挖掘機(jī)通常要配備電控手柄,控制器對電控手柄傳來的信號進(jìn)行處理后輸出控制信號,分別用于控制多路閥的開關(guān)和變量泵排量的調(diào)節(jié)。本文電控正流量挖掘機(jī)的控制原理如圖1所示。

圖1 電控正流量挖掘機(jī)控制原理Fig.1 Control principle of electronically controlled pos‐itive flow excavator
1.2 分階段控制功率需求
挖掘機(jī)的作業(yè)環(huán)境通常比較惡劣,因此其實(shí)時工況非常復(fù)雜。為了降低負(fù)載波動對發(fā)動機(jī)的影響[15],本文將挖掘機(jī)的一個作業(yè)循環(huán)分為不同階段,并以此為基礎(chǔ)來控制發(fā)動機(jī)的轉(zhuǎn)速。挖掘機(jī)的一個完整作業(yè)循環(huán)可分為4個階段:挖掘階段、滿載返回階段、卸載階段和空載返回階段。挖掘機(jī)在不同作業(yè)階段的功率需求如圖2所示。

圖2 挖掘機(jī)不同作業(yè)階段的功率需求Fig.2 Power demand of excavator at different working stages
1)挖掘階段。挖掘是一個作業(yè)循環(huán)的開始,駕駛員通過操縱電控手柄來使鏟斗系統(tǒng)工作,以使鏟斗內(nèi)裝滿待裝填的物料。由于挖掘階段要克服較大的挖掘阻力,因此需要發(fā)動機(jī)提供較大的功率[16]。
2)滿載返回階段。挖掘機(jī)在滿載返回階段主要執(zhí)行動臂、斗桿的提升和回轉(zhuǎn)動作,以將挖掘的物料轉(zhuǎn)移至目標(biāo)地點(diǎn)。滿載返回階段無需克服挖掘阻力,但要求液壓系統(tǒng)響應(yīng)快速,因此要提高發(fā)動機(jī)的轉(zhuǎn)速,以增大變量泵的排量[17]。
3)卸載階段。挖掘機(jī)卸載時,其鏟斗執(zhí)行機(jī)構(gòu)和斗桿執(zhí)行機(jī)構(gòu)交替工作,需要發(fā)動機(jī)提供較大的功率,以保證挖掘機(jī)的卸載動作能夠快速完成。
4)空載返回階段。挖掘機(jī)在空載返回階段要執(zhí)行的動作較多,鏟斗、斗桿、動臂等的執(zhí)行機(jī)構(gòu)均單獨(dú)動作,目的是使鏟斗移動至下一個挖掘點(diǎn)[18]。挖掘機(jī)在空載返回階段只需克服重力做功,故所需的功率不大,但仍要提高發(fā)動機(jī)的轉(zhuǎn)速,以使挖掘機(jī)各個動作響應(yīng)更快[19]。
1.3 發(fā)動機(jī)特性
本文所研究的挖掘機(jī)選用的發(fā)動機(jī)為柴油機(jī)。由于柴油機(jī)的工況復(fù)雜多變,難以建立精確的數(shù)學(xué)模型來描述其工作機(jī)理,因此本文借助圖3所示的柴油機(jī)萬有特性曲線來開展相關(guān)研究。

圖3 柴油機(jī)的萬有特性曲線Fig.3 Universal characteristic curve of diesel engine
從圖3中可以看出,柴油機(jī)的經(jīng)濟(jì)油耗區(qū)對應(yīng)的轉(zhuǎn)速區(qū)間為1 500~1 750 r/min。根據(jù)挖掘機(jī)分階段控制的功率需求,柴油機(jī)的轉(zhuǎn)速宜控制在1 500~1 750 r/min內(nèi),這樣能保證柴油機(jī)既滿足挖掘機(jī)不同作業(yè)階段的功率需求,又能始終在經(jīng)濟(jì)油耗區(qū)內(nèi)工作。
2 電控正流量挖掘機(jī)液壓系統(tǒng)建模
本文利用AMESim軟件來搭建電控正流量挖掘機(jī)液壓系統(tǒng)模型。AMESim軟件提供了豐富的元件庫和聯(lián)合仿真接口,對于具有特殊作用的液壓元件,如三位六通換向閥、閉鎖閥等,可直接利用液壓元件設(shè)計(jì)庫進(jìn)行封裝設(shè)計(jì)。
2.1 三位六通換向閥模型
為減少液壓油傳遞過程中的管道壓力損失以及簡化液壓油路,本文設(shè)計(jì)封裝了多個三位六通換向閥,其原理如圖4 所示[4]。其中,三位六通換向閥的A、B 口分別與挖掘機(jī)執(zhí)行機(jī)構(gòu)的無桿腔和有桿腔相連,D、P 口連接變量泵,T 口與回油油路相連,C 口與下一個三位六通換向閥的P 口相連。當(dāng)三位六通換向閥處于中位時,D口與變量泵直接相連,液壓油通過回油油路回到油箱;當(dāng)三位六通換向閥受到先導(dǎo)壓力時,其閥芯產(chǎn)生位移,此時換向閥根據(jù)閥口開度分配流向不同執(zhí)行機(jī)構(gòu)的流量[20]。

圖4 三位六通換向閥原理Fig.4 Principle of three-position six-way directional valve
2.2 發(fā)動機(jī)-雙泵模型
為了提高挖掘機(jī)執(zhí)行機(jī)構(gòu)的運(yùn)行速度,執(zhí)行機(jī)構(gòu)由2個變量泵同時供油,變量泵直接由發(fā)動機(jī)驅(qū)動。控制器根據(jù)電控手柄的信號確定變量泵的排量,并將變量泵排量的控制信號傳輸至變量泵調(diào)節(jié)機(jī)構(gòu),以實(shí)現(xiàn)變量泵排量的調(diào)節(jié)。電控正流量液壓系統(tǒng)的發(fā)動機(jī)-雙泵模型如圖5所示。

圖5 發(fā)動機(jī)-雙泵模型Fig.5 Engine-dual pump model
2.3 電控正流量液壓系統(tǒng)模型
根據(jù)電控正流量挖掘機(jī)液壓系統(tǒng)的原理,利用AMESim軟件中的液壓庫和機(jī)械庫建立電控正流量液壓系統(tǒng)模型,如圖6所示。其中,挖掘機(jī)的動臂、斗桿和鏟斗執(zhí)行機(jī)構(gòu)的參數(shù)設(shè)置如表2所示;液壓油的相關(guān)參數(shù)均采用默認(rèn)值。
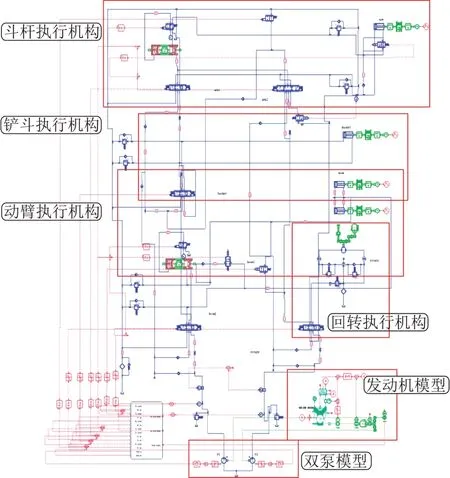
圖6 電控正流量挖掘機(jī)液壓系統(tǒng)模型Fig.6 Hydraulic system model of electronically controlled positive flow excavator

表2 挖掘機(jī)各執(zhí)行機(jī)構(gòu)參數(shù)設(shè)置Table 2 Parameter setting for each actuator of excavator 單位:mm
3 電控正流量挖掘機(jī)控制系統(tǒng)建模
Simulink 是MATLAB 軟件中的可視化仿真工具[21],被廣泛應(yīng)用于控制器的設(shè)計(jì)和嵌入式開發(fā)等。本文在MATLAB/Simulink環(huán)境中構(gòu)建電控正流量挖掘機(jī)控制系統(tǒng)模型,并聯(lián)合AMESim軟件進(jìn)行仿真驗(yàn)證。
本文電控正流量挖掘機(jī)的控制系統(tǒng)采用分層控制策略:上層控制器通過電控手柄信號判斷挖掘機(jī)各執(zhí)行機(jī)構(gòu)的流量需求和狀態(tài),以判定挖掘機(jī)所處的作業(yè)階段,從而確定發(fā)動機(jī)的基速;下層控制器接收來自上層控制器的發(fā)動機(jī)基速,并同步采集主供油泵的壓力信號,通過模糊控制對發(fā)動機(jī)的轉(zhuǎn)速進(jìn)行修正,以得到發(fā)動機(jī)的期望轉(zhuǎn)速。電控正流量挖掘機(jī)的分層控制流程如圖7所示。

圖7 電控正流量挖掘機(jī)分層控制流程Fig.7 Hierarchical control flow of electronically controlled positive flow excavator
3.1 上層控制器設(shè)計(jì)
3.1.1 電控手柄信號濾波處理
挖掘機(jī)在工作過程中產(chǎn)生的抖動可能會使駕駛員無意識地操作電控手柄。為了保證挖掘機(jī)能夠平穩(wěn)地工作,采用基于卡爾曼濾波器的PID(propor‐tional-integral-derivative,比例-積分-微分)控制算法[22],以準(zhǔn)確地追蹤電控手柄的信號。該算法的控制原理和控制模型分別如圖8和圖9所示。
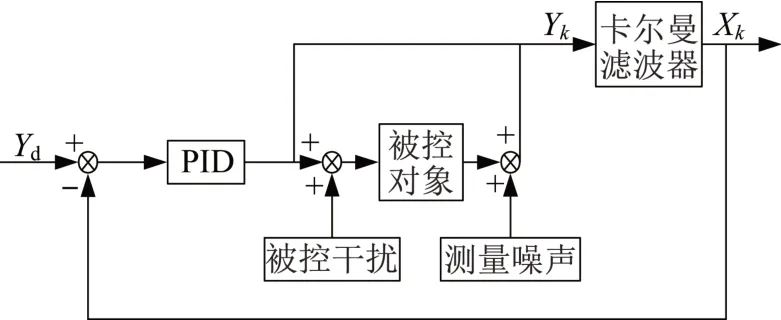
圖8 基于卡爾曼濾波器的PID控制原理Fig.8 PID control principle based on Kalman filter

圖9 基于卡爾曼濾波器的PID控制模型Fig.9 PID control model based on Kalman filter
本文電控手柄的信號僅有一個維度且呈周期性變化,由于在傳遞過程中受到干擾和噪聲的作用,電控手柄信號Xk的遞推過程如下:
式中:ωk為隨機(jī)干擾,Yk為經(jīng)PID控制算法處理后的電控手柄信號,εk為隨機(jī)觀測噪聲,Ck為變化的系數(shù),k為時刻。
卡爾曼濾波的原理為:將傳感器的測量值與卡爾曼濾波模型的觀測值融合,以獲得準(zhǔn)確的電控手柄信號Xk作為上層控制器的輸入信號。具體遞推公式如下:
3.1.2 執(zhí)行機(jī)構(gòu)狀態(tài)判斷
在上層控制器中,先根據(jù)鑰匙狀態(tài)來判斷挖掘機(jī)中發(fā)動機(jī)的工作狀態(tài);若發(fā)動機(jī)處于工作狀態(tài),則控制器根據(jù)電控手柄的信號判斷執(zhí)行機(jī)構(gòu)的狀態(tài),進(jìn)而判斷挖掘機(jī)所處的作業(yè)階段,由此確定發(fā)動機(jī)的基速并傳遞給下層控制器。圖10和圖11所示分別為發(fā)動機(jī)工作狀態(tài)的切換邏輯及挖掘機(jī)執(zhí)行機(jī)構(gòu)狀態(tài)的判斷邏輯。

圖10 發(fā)動機(jī)工作狀態(tài)判斷邏輯Fig.10 Judgmental logic of working state of engine

圖11 挖掘機(jī)執(zhí)行機(jī)構(gòu)狀態(tài)判斷邏輯Fig.11 Judgmental logic of state of excavator actuator
3.2 下層控制器設(shè)計(jì)
3.2.1 發(fā)動機(jī)期望轉(zhuǎn)速計(jì)算
當(dāng)下層控制器接收到上層控制器的輸出信號后,利用模糊控制算法來修正發(fā)動機(jī)的轉(zhuǎn)速。由于挖掘機(jī)處于不同作業(yè)階段時,其主供油泵的壓力存在明顯區(qū)別,因此以主供油泵壓力p和主供油泵壓力變化率e作為模糊控制器的輸入,發(fā)動機(jī)轉(zhuǎn)速增量Δr作為輸出。定義模糊子集為{NB,NM,NS,ZO,PS,PM,PB},分別表示輸入p、e和輸出Δr的值為負(fù)大、負(fù)中、負(fù)小、零、正小、正中、正大;輸入、輸出均選用三角形隸屬度函數(shù)。相較于文獻(xiàn)[6]提出的僅采用主供油泵壓力來判斷挖掘機(jī)的作業(yè)階段,本文方法更加可靠。當(dāng)挖掘機(jī)處于挖掘階段時,其所受的負(fù)載變大,此時主供油泵壓力p為PB,主供油泵壓力變化率e為PB,說明此時挖掘機(jī)所需的功率較大,則輸出發(fā)動機(jī)轉(zhuǎn)速增量Δr為NB,即增大挖掘機(jī)的輸出功率。同理,可得到挖掘機(jī)處于其他作業(yè)階段時發(fā)動機(jī)轉(zhuǎn)速的模糊控制規(guī)則,具體如表3所示。
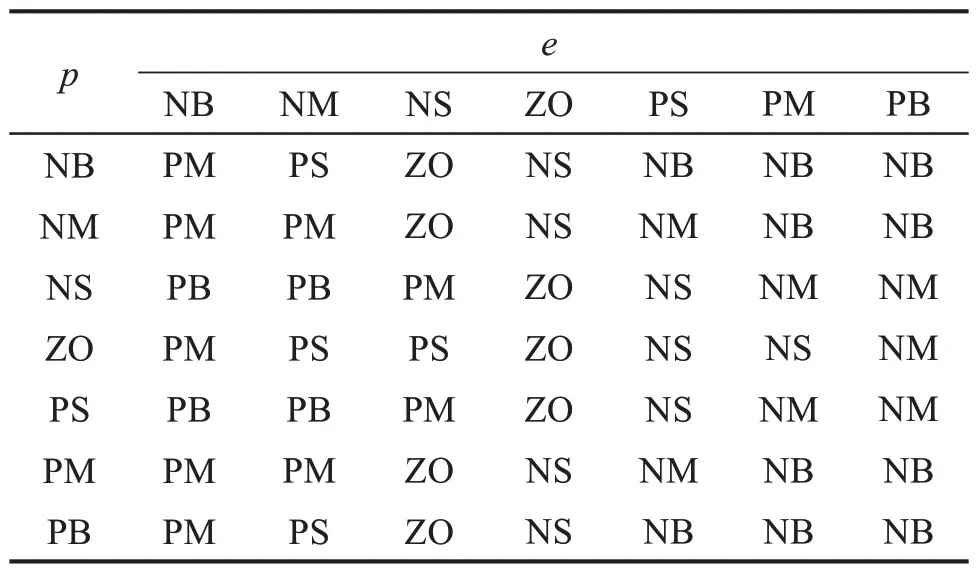
表3 發(fā)動機(jī)轉(zhuǎn)速的模糊控制規(guī)則Table 3 Fuzzy control rule for engine speed
根據(jù)模糊控制器的輸出,可得發(fā)動機(jī)的期望轉(zhuǎn)速re:
式中:r0為發(fā)動機(jī)的基速,來自上層控制器。
3.2.2 發(fā)動機(jī)轉(zhuǎn)速控制
在挖掘機(jī)分階段控制的研究中,發(fā)動機(jī)的轉(zhuǎn)速控制十分重要[23]。傳統(tǒng)的挖掘機(jī)一般采用PID 控制來穩(wěn)定發(fā)動機(jī)的轉(zhuǎn)速,但基于PID控制的轉(zhuǎn)速調(diào)節(jié)具有一定的滯后性且超調(diào)量較大,故本文采用滑模PID 控制算法來穩(wěn)定發(fā)動機(jī)的轉(zhuǎn)速。這種綜合控制方式既能快速穩(wěn)定發(fā)動機(jī)的轉(zhuǎn)速,又可在一定程度上消除PID控制調(diào)節(jié)轉(zhuǎn)速的弊端。
當(dāng)發(fā)動機(jī)的實(shí)際轉(zhuǎn)速與期望轉(zhuǎn)速的差值大于切換閾值時,采用滑模控制算法來穩(wěn)定發(fā)動機(jī)的轉(zhuǎn)速,此時須建立發(fā)動機(jī)及其調(diào)速系統(tǒng)的數(shù)學(xué)模型。本文發(fā)動機(jī)數(shù)學(xué)模型采用一階滯后模型,其調(diào)速系統(tǒng)的數(shù)學(xué)模型采用二階模型[24],分別表示為:
式中:T、Z分別為發(fā)動機(jī)的滯后時間和系統(tǒng)增益,T1為發(fā)動機(jī)加速度時間常數(shù),T2、m、n為與發(fā)動機(jī)調(diào)速系統(tǒng)執(zhí)行線圈的時間常數(shù)有關(guān)的待定系數(shù)。
選取發(fā)動機(jī)節(jié)氣門位置W、位置誤差E和位置誤差的一階導(dǎo)數(shù)?為狀態(tài)變量,基于式(9)和式(10)構(gòu)建發(fā)動機(jī)工作時的狀態(tài)空間方程:
其中:
式中:X為發(fā)動機(jī)的狀態(tài)變量,a0、a1、a2、b為常數(shù)。
將切換函數(shù)S設(shè)計(jì)為:
式中:D為系數(shù),D=0.1。
為了使發(fā)動機(jī)的轉(zhuǎn)速能沿滑模面快速向期望轉(zhuǎn)速趨近,采用比例切換函數(shù)設(shè)計(jì)相應(yīng)的輸入U,如式(13)所示,并以此為基礎(chǔ)搭建發(fā)動機(jī)的滑模控制模型,如圖12所示。

圖12 發(fā)動機(jī)滑模控制模型Fig.12 Sliding mode control model of engine
式中:α、β為系數(shù),α=0.94、β=0.05。
當(dāng)發(fā)動機(jī)的實(shí)際轉(zhuǎn)速與期望轉(zhuǎn)速的差值小于切換閾值時,采用PID控制來穩(wěn)定發(fā)動機(jī)的轉(zhuǎn)速,直接用PID 控制模塊代替滑模控制模塊即可,其中PID控制參數(shù)設(shè)置如下:Kp=1.64,Ki=0.2,Kd=0.03。
3.2.3 主、副閥流量分配
本文電控正流量挖掘機(jī)的液壓系統(tǒng)采用雙變量泵供油。其中,主供油泵與主三位六通換向閥相連,副供油泵與副三位六通換向閥相連,2 個變量泵同時為挖掘機(jī)的執(zhí)行機(jī)構(gòu)供油。當(dāng)不同的執(zhí)行機(jī)構(gòu)動作時,執(zhí)行不同的供油規(guī)則,如表4所示。
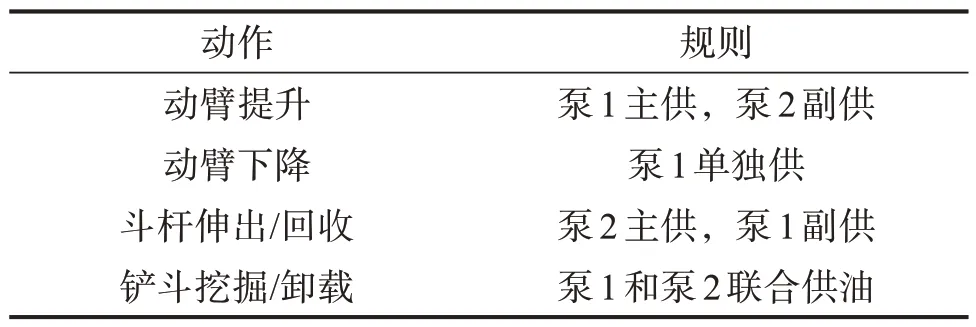
表4 挖掘機(jī)變量泵的供油規(guī)則Table 4 Oil supply rules for variable pump in excavator
當(dāng)確定挖掘機(jī)執(zhí)行機(jī)構(gòu)的流量需求后,在變量泵的作用下,液壓油經(jīng)過三位六通換向閥流入執(zhí)行機(jī)構(gòu)的液壓油缸。為了確定三位六通換向閥的閥芯開度,須對需求流量進(jìn)行分配。主、副閥的流量分配控制策略如圖13所示。
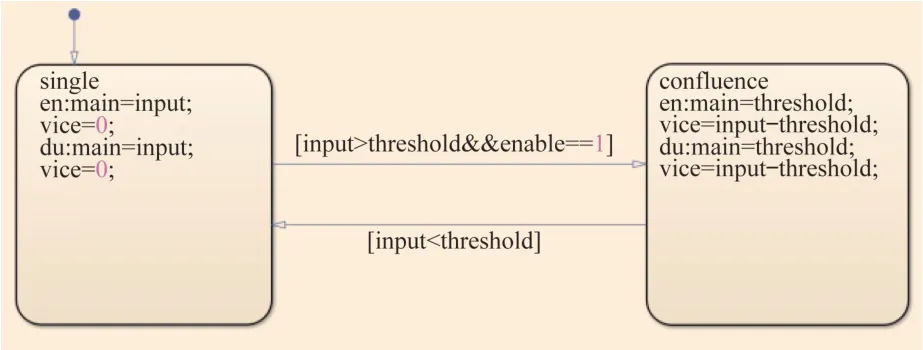
圖13 主、副三位六通換向閥流量分配控制策略Fig.13 Flow distribution control strategy of master and aux‐iliary three-position six-way directional valve
確定了主、副三位六通換向閥的流量后,需要進(jìn)一步計(jì)算其閥芯的開度。三位六通換向閥閥口的流量特性如下:
式中:c為流量系數(shù);ρ為液壓油密度;A為閥口開度面積;L為流經(jīng)閥口的流量,即相應(yīng)執(zhí)行機(jī)構(gòu)所需的流量;Δp為流過控制閥前后液壓油的壓力差。
4 電控正流量挖掘機(jī)仿真分析
4.1 聯(lián)合仿真接口構(gòu)建
完成電控正流量挖掘機(jī)液壓系統(tǒng)和控制系統(tǒng)建模后,搭建聯(lián)合仿真模型,以驗(yàn)證所采用控制策略的有效性,具體流程如下。
1)在AMESim 軟件中創(chuàng)建SimuCoSim 接口,完成挖掘機(jī)液壓系統(tǒng)建模后,在進(jìn)行聯(lián)合仿真時該接口會生成一個mex64文件。
2)在Simulink 軟件中創(chuàng)建AME2SLCoSim 接口并讀取mex64文件,完成聯(lián)合仿真接口配置。
在聯(lián)合仿真時,AMESim軟件將變量泵出口壓力和發(fā)動機(jī)轉(zhuǎn)速信號傳遞至Simulink軟件;Simulink軟件將變量泵排量和三位六通換向閥的閥芯開度信號傳遞至AMESim 軟件。圖14 和圖15 分別為挖掘機(jī)聯(lián)合仿真的Simulink接口和AMESim接口。

圖14 挖掘機(jī)聯(lián)合仿真的Simulink接口Fig.14 Simulink interface for co-simulation of excavator
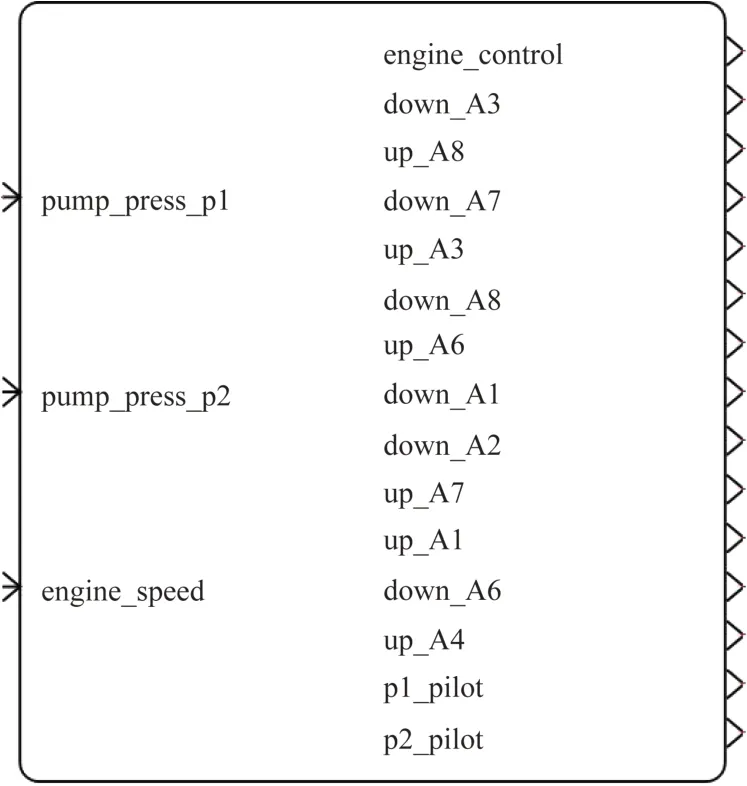
圖15 挖掘機(jī)聯(lián)合仿真的AMESim接口Fig.15 AMESim interface for co-simulation of excavator
挖掘機(jī)在工作時大多以單動作為主,少量場景下會使用復(fù)合動作。在聯(lián)合仿真時,通過改變變量泵壓力和發(fā)動機(jī)轉(zhuǎn)速來觀察挖掘機(jī)執(zhí)行機(jī)構(gòu)的響應(yīng)情況。
4.2 挖掘機(jī)單動作仿真分析
挖掘機(jī)的鏟斗、動臂和斗桿均可進(jìn)行正反2個方向的運(yùn)動。本文選擇功率需求最大的鏟斗內(nèi)收動作進(jìn)行仿真分析。挖掘機(jī)在執(zhí)行鏟斗內(nèi)收動作時,發(fā)動機(jī)轉(zhuǎn)速和鏟斗油缸壓力的仿真曲線分別如圖16和圖17所示。由圖可知,在仿真開始階段,電控手柄不動作,此時發(fā)動機(jī)以1 700 r/min 的轉(zhuǎn)速運(yùn)行,鏟斗油缸的壓力基本為0 Pa。當(dāng)t=1 s時,在先導(dǎo)壓力的作用下,三位六通換向閥的閥芯產(chǎn)生位移,液壓油在變量泵的作用下經(jīng)過油路進(jìn)入鏟斗油缸,此時鏟斗油缸無桿腔和有桿腔的壓力急速上升,發(fā)動機(jī)的轉(zhuǎn)速也因負(fù)載波動而產(chǎn)生突變。當(dāng)t=1.8 s左右時,鏟斗油缸有桿腔和無桿腔的壓力達(dá)到最大,說明鏟斗開始動作。當(dāng)t=2.2 s左右時,發(fā)動機(jī)轉(zhuǎn)速穩(wěn)定在1 600 r/min,由此驗(yàn)證了滑模PID 控制算法的有效性。

圖16 鏟斗動作時發(fā)動機(jī)轉(zhuǎn)速的仿真曲線Fig.16 Simulation curve of engine speed during bucket action

圖17 鏟斗油缸壓力仿真曲線Fig.17 Simulation curve of bucket cylinder pressure
4.3 挖掘機(jī)復(fù)合動作仿真分析
在挖掘機(jī)的實(shí)際操縱中,最常見的復(fù)合動作為動臂和斗桿同時動作。選取動臂提升和斗桿外伸這一復(fù)合動作進(jìn)行仿真分析。挖掘機(jī)在同時執(zhí)行動臂提升和斗桿外伸時,發(fā)動機(jī)的轉(zhuǎn)速、動臂油缸壓力和斗桿油缸壓力的仿真曲線分別如圖18 至圖20 所示。由圖可知,在仿真開始階段,電控手柄不動作,動臂油缸和斗桿油缸的壓力基本為0 Pa,發(fā)動機(jī)以1 700 r/min的轉(zhuǎn)速運(yùn)行。當(dāng)t=1 s時,在先導(dǎo)壓力的作用下,三位六通換向閥的閥芯產(chǎn)生位移,液壓油在變量泵的作用下經(jīng)過油路進(jìn)入動臂油缸和斗桿油缸,此時動臂油缸和斗桿油缸的無桿腔和有桿腔的壓力均急速上升,發(fā)動機(jī)轉(zhuǎn)速因負(fù)載波動而產(chǎn)生突變;最終發(fā)動機(jī)的轉(zhuǎn)速穩(wěn)定在1 700 r/min左右。對比圖17、圖19 和圖20 可知,動臂油缸和斗桿油缸的壓力明顯小于鏟斗油缸的壓力,說明挖掘機(jī)在執(zhí)行復(fù)合動作時,變量泵排出的流量同時流向動臂油缸和斗桿油缸,導(dǎo)致其壓力較執(zhí)行單動作時小,進(jìn)而影響執(zhí)行機(jī)構(gòu)的響應(yīng)速度,該仿真結(jié)果符合預(yù)期。

圖18 動臂、斗桿動作時發(fā)動機(jī)轉(zhuǎn)速的仿真曲線Fig.18 Simulation curve of engine speed during action of boom and stick

圖19 斗桿油缸壓力仿真曲線Fig.19 Simulation curve of stick cylinder pressure

圖20 動臂油缸壓力仿真曲線Fig.20 Simulation curve of boom cylinder pressure
4.4 挖掘機(jī)油耗仿真分析
本文的電控正流量挖掘機(jī)采用分階段控制方式。為了驗(yàn)證該控制方式的優(yōu)越性,以分工況控制方式為對比,通過聯(lián)合仿真比較2種控制方式下發(fā)動機(jī)的油耗情況。在AMESim軟件中,將發(fā)動機(jī)轉(zhuǎn)速設(shè)為固定值,即可將分階段控制轉(zhuǎn)換為分工況控制。在2種控制方式下,挖掘機(jī)均完成一個完整的作業(yè)循環(huán)。不同控制方式下發(fā)動機(jī)的油耗對比如圖21所示。

圖21 不同控制方式下發(fā)動機(jī)的油耗對比Fig.21 Comparison of engine fuel consumption under different control methods
從圖21中可以看出,在一個作業(yè)循環(huán)內(nèi),當(dāng)挖掘機(jī)采用分階段控制時,發(fā)動機(jī)在不同作業(yè)階段的油耗存在明顯變化,尤其是空載返回階段,該階段的油耗為192 g/(kW·h)左右;當(dāng)采用分工況控制時,發(fā)動機(jī)的油耗始終為220 g/(kW·h)左右,與分階段控制相比,空載返回階段的能量浪費(fèi)嚴(yán)重。綜上,對于正流量挖掘機(jī)而言,分階段控制優(yōu)于分工況控制。
5 電控正流量挖掘機(jī)實(shí)驗(yàn)研究
5.1 實(shí)驗(yàn)設(shè)備
通過聯(lián)合仿真驗(yàn)證了電控正流量挖掘機(jī)分階段控制策略的有效性,但是任何模型的仿真結(jié)果均與實(shí)際結(jié)果存在一定誤差。因此,開展實(shí)車驗(yàn)證是十分有必要的。圖22所示為實(shí)車驗(yàn)證時所采用的挖掘機(jī)機(jī)型。

圖22 挖掘機(jī)實(shí)驗(yàn)機(jī)型Fig.22 Experimental excavator model
5.2 實(shí)車實(shí)驗(yàn)
在實(shí)車實(shí)驗(yàn)中,挖掘機(jī)無論是采用分階段控制還是采用分工況控制,在挖掘開始前鏟斗均已轉(zhuǎn)移到挖掘點(diǎn),通過操縱電控手柄完成一個完整的作業(yè)循環(huán)。基本流程如下:在0—5 s階段,挖掘機(jī)的鏟斗完成挖掘動作;在5—11 s階段,鏟斗完成從挖掘點(diǎn)到卸載點(diǎn)的轉(zhuǎn)移;在11—15 s階段,挖掘機(jī)完成卸載;在15—25 s 階段,鏟斗返回至新的挖掘點(diǎn),準(zhǔn)備開始下一個作業(yè)循環(huán)。在分階段控制下挖掘機(jī)的發(fā)動機(jī)轉(zhuǎn)速、主供油泵出口壓力以及主供油泵出口流量的實(shí)測曲線分別如圖23 至圖25 所示。分階段和分工況控制下挖掘機(jī)發(fā)動機(jī)的工作點(diǎn)分布分別如圖26和圖27所示。
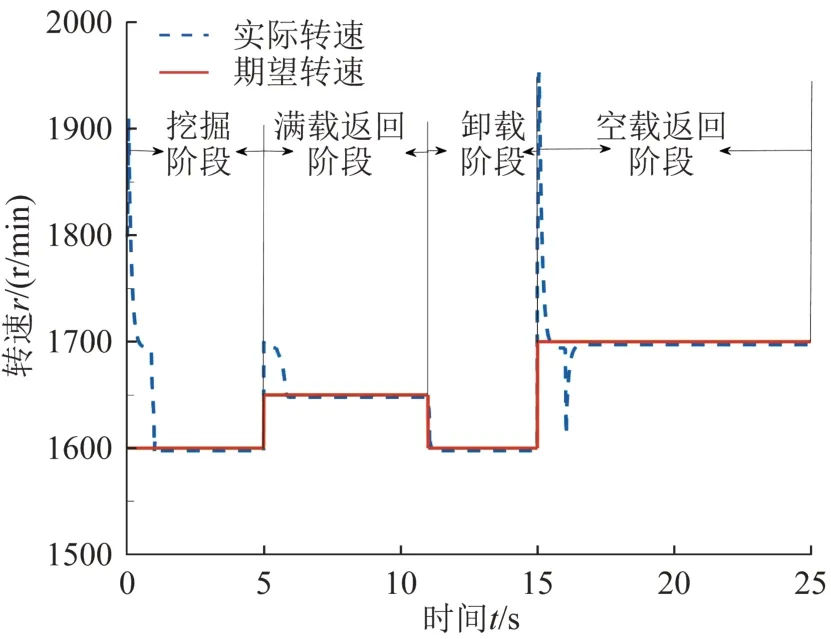
圖23 分階段控制下發(fā)動機(jī)轉(zhuǎn)速的實(shí)測曲線Fig.23 Measured curve of engine speed under phased control
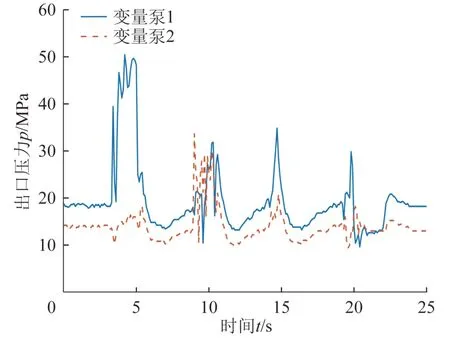
圖24 分階段控制下主供油泵出口壓力實(shí)測曲線Fig.24 Measured curve of main oil feed pump outlet pressure under phased control

圖25 分階段控制下主供油泵出口流量實(shí)測曲線Fig.25 Measured curve of main oil feed pump outlet flow under phased control

圖26 分階段控制下發(fā)動機(jī)工作點(diǎn)分布Fig.26 Distribution of engine operating points under phased control
從圖23中可以看出,當(dāng)挖掘機(jī)采用分階段控制時,發(fā)動機(jī)在不同作業(yè)階段的實(shí)際轉(zhuǎn)速均能穩(wěn)定在期望轉(zhuǎn)速附近,進(jìn)一步驗(yàn)證了所采用的滑模PID控制算法的有效性。此外,發(fā)動機(jī)轉(zhuǎn)速和主供油泵壓力的變化均符合挖掘機(jī)在一個作業(yè)循環(huán)內(nèi)的負(fù)載變化規(guī)律:在挖掘階段和卸載階段功率需求較大,主供油泵壓力較大,發(fā)動機(jī)轉(zhuǎn)速較低;其他作業(yè)階段功率需求較小,主供油泵壓力較小,發(fā)動機(jī)轉(zhuǎn)速較高。對比圖26 和圖27 可知,在分階段控制下,發(fā)動機(jī)在一個作業(yè)循環(huán)內(nèi)的大多數(shù)工作點(diǎn)均在經(jīng)濟(jì)油耗區(qū),而分工況控制下發(fā)動機(jī)僅有小部分工作點(diǎn)在經(jīng)濟(jì)油耗區(qū)內(nèi)。由此可知,采用分階段控制時發(fā)動機(jī)的工作點(diǎn)分布更加合理,能量利用率更高。

圖27 分工況控制下發(fā)動機(jī)工作點(diǎn)分布Fig.27 Distribution of engine operating points under control by different working conditions
6 結(jié) 論
本文以某電控正流量挖掘機(jī)為研究對象,提出了一種分階段控制策略。將挖掘機(jī)的一個作業(yè)循環(huán)分為4個階段:挖掘階段、滿載返回階段、卸載階段和空載返回階段。同時,基于AMESim與Simulink軟件建立了電控正流量挖掘機(jī)液壓系統(tǒng)和控制系統(tǒng)的仿真模型,通過聯(lián)合仿真驗(yàn)證了所提出的分階段控制策略的有效性。最后,通過實(shí)車實(shí)驗(yàn)證明,挖掘機(jī)處于不同作業(yè)階段時的功率需求不同,采用分階段控制可以及時調(diào)整發(fā)動機(jī)的轉(zhuǎn)速,改善了發(fā)動機(jī)工作點(diǎn)的分布并降低了發(fā)動機(jī)的油耗。
猜你喜歡
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:30
汽車維修與保養(yǎng)(2021年8期)2021-02-16 00:28:18
汽車維修與保養(yǎng)(2020年11期)2020-06-09 05:42:06
民用飛機(jī)設(shè)計(jì)與研究(2019年2期)2019-08-05 01:33:40
汽車維護(hù)與修理(2016年3期)2016-02-28 13:16:54
汽車維修與保養(yǎng)(2015年1期)2015-04-17 03:25:30
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年6期)2014-02-27 12:10:49
汽車與新動力(2014年5期)2014-02-27 12:10:41
汽車與新動力(2014年2期)2014-02-27 12:10:15