礦井掘進工作面富水區多點電源高分辨電法探測
2024-01-09 09:40:16吳榮新
煤田地質與勘探 2023年12期
吳榮新,徐 輝
(1.煤炭安全精準開采國家地方聯合工程研究中心,安徽 淮南 232001;2.安徽理工大學 地球與環境學院,安徽 淮南 232001)
煤炭的精準開采,需要更加完善的礦山地質保障系統,要求在巷道掘進前能夠準確探查巷道前方地質條件[1-2]。《煤礦防治水細則》規定受水害威脅的礦井巷道掘進前要查明掘進工作面前方富水區的賦存情況,直流電法超前探測是廣泛采用的一種富水區探測方法[3-4]。前人對其進行了大量研究,發現其對巷道前方地質異常探測效果顯著。在直流電法超前探測方法研究方面:程久龍等[5]系統研究了兩點電源三極電阻率法超前探測數據采集與處理方法;劉青雯[6]研究了三點源三極超前探測方法;韓德品等[7]開展了四點電源七電極系含導水構造超前探測研究;胡雄武等[8]提出了多極供電電阻率法超前探測,運用多極偏移疊加方法處理數據;李術才等[9]開展了多同性源陣列電阻率法隧道超前探測方法研究;王敏等[10]提出了二極裝置U 型觀測系統及數據處理方法;直流電法超前探測與孔內視電阻率法相結合可準確探測導水裂隙帶、頂板垮落帶[11]。在電法超前探測數值模擬和物理模擬研究方面:黃俊革等[12-13]利用有限元數值模擬技術消除坑道空腔對視電阻率的影響,采用最小二乘法進行快速反演;劉斌等[14]對隧道含水構造進行了系統的理論推導、正反演運算及物理模型試驗;馬炳鎮等[15]通過數值模擬研究了巷道因素對電法超前探測的影響;Deng Xiaokang 等[16]采用三維有限元數值模擬對聚焦電流法超前探測進行了研究;張淼淼等[17]對巷道漸進式排列電法超前探測進行了正演模擬研究;劉路等[18]提出電法三維觀測系統,開展了不同異常體位置的數值模擬研究;周官群等[19]利用“三角錐”型鉆孔觀測系統對直流電法超前探測開展正演模擬研究。
盡管直流電法超前探測研究已較為全面,但前人的研究主要關注掘進工作面超前方向的富水區,對掘進工作面側前方及后方的富水區缺少系統研究,這些區域存在水害安全隱患。高分辨地電阻率法是基于點電源場探測地下異常體的方法,對地下洞體探測具有快速、準確和結果直觀的特點[20],在煤田火燒區的探測中應用效果良好[21],在礦井煤層巷道側向無煤區的探測中也取得了良好的效果[22]。本文作者在多道電極觀測系統超前探測基礎上,結合高分辨地電阻率法數據處理技術,提出多點電源高分辨電法探測,以期準確探測掘進工作面前后富水區分布情況。
1 多點電源高分辨電法數據采集
直流電法超前探測的理論是基于電性均勻介質全空間探測原理,采用單極?偶極裝置(A-MN),B電極置于無窮遠處,在掘進工作面后方布置電極系統觀測視電阻率的變化,以判斷巷道前方是否存在地質異常體[5-7]。通常在掘進工作面后方布置3~4 個固定點電源[6-7]。掘進工作面多點電源高分辨電法以多道電極直流電法超前探測方法為基礎,探查掘進工作面前后電阻率異常體的分布情況,拓展掘進工作面后方固定點電源數可以達到8 個以上。
該探測系統通過在掘進工作面一次布置m道電極(通常m≥32),相鄰電極間距相等,電極陣列測線長度通常100~ 200 m,其中近工作面1/4 測線長度的電極依次做為供電電極(圖1)。以32 道電極系統、相鄰電極距5 m 為例,從掘進工作面位置沿巷道中心底板布置電極,1 號電極為A極供電時,依次取2―3、3―4、4―5,直到31―32 號電極為MN偶極,測量視電阻率值,參照微分電測深視電阻率值記錄點方式[23],可將各視電阻率值視為1 號點電源電測深視電阻率值,得到1 號點電源電測深曲線,各視電阻率值記錄深度H為MN中點到A極距離;2 號電極為A極供電時,依次取3―4、4―5、5―6,直到31―32 號電極為MN偶極,得到2 號點電源電測深曲線;依此類推,可得到1―8 號點電源供電電測深曲線,多點電源觀測系統數據采集結束。所測得的視電阻率數據記為ρs(i,j),i為點電源電極號,j為第i個點電源所測的第j個電阻率值序號。數據采集電法儀器可采用高密度電法儀或并行電法儀[24]。若電極測線總長度相當,且電極總數不少于32,電極數變化對富水區探查結果無明顯影響。

圖1 探測系統布置Fig.1 Layout of the detection system
2 富水區視電阻率響應
電性均勻介質地層中的有限范圍相對富水區可以概化為低電阻率值的“等效球體”[14],對于單極?偶極探測裝置(圖2),其富水低電阻率球體的視電阻率ρsz響應公式[25]為:
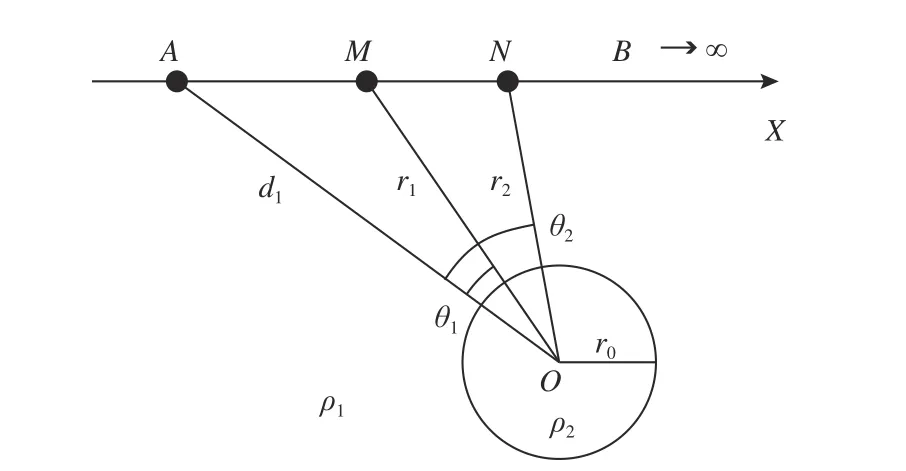
圖2 單極?偶極裝置幾何參數Fig.2 Geometric parameters of the monopole-dipole device
式中:ρ1為背景電阻率;ρ2為富水球體電阻率;r0為富水球體半徑;θ1為∠AOM;θ2為∠AON;d1為AO距離;r1為MO距離;r2為NO距離。
由式(1)可知,富水球體半徑越大,其產生的勘探體積效應越明顯,視電阻率值響應變化越明顯。根據礦井巖層電阻率值特征及前人電法超前探測電阻率值理論計算電阻率參數[5,13],設定背景電阻率值ρ1=100 Ω?m,富水球體電阻率值ρ2=10 Ω?m,球體半徑r0=10 m。以32 道電極系統、相鄰電極距5 m 為例,分析富水區在掘進工作面不同位置多點電源電法探測的視電阻率值響應特征(圖3)。將掘進工作面位置設定為坐標原點,向巷道后方為X軸正向,掘進工作面超前探測方向為負向,由式(1)計算得到不同位置的正演電阻率曲線(圖4)及成像結果(圖5)。
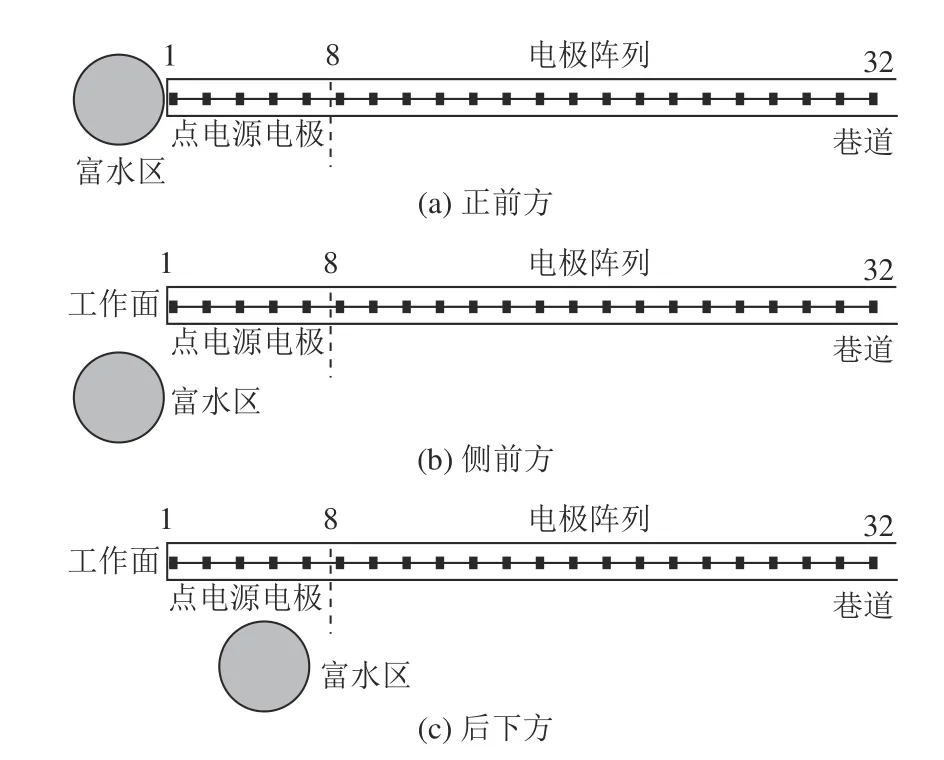
圖3 富水區位置Fig.3 Locations of water-rich areas
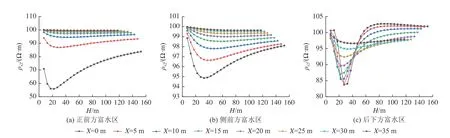
圖4 正演電阻率測深曲線Fig.4 Resistivity sounding curves derived from forward modeling
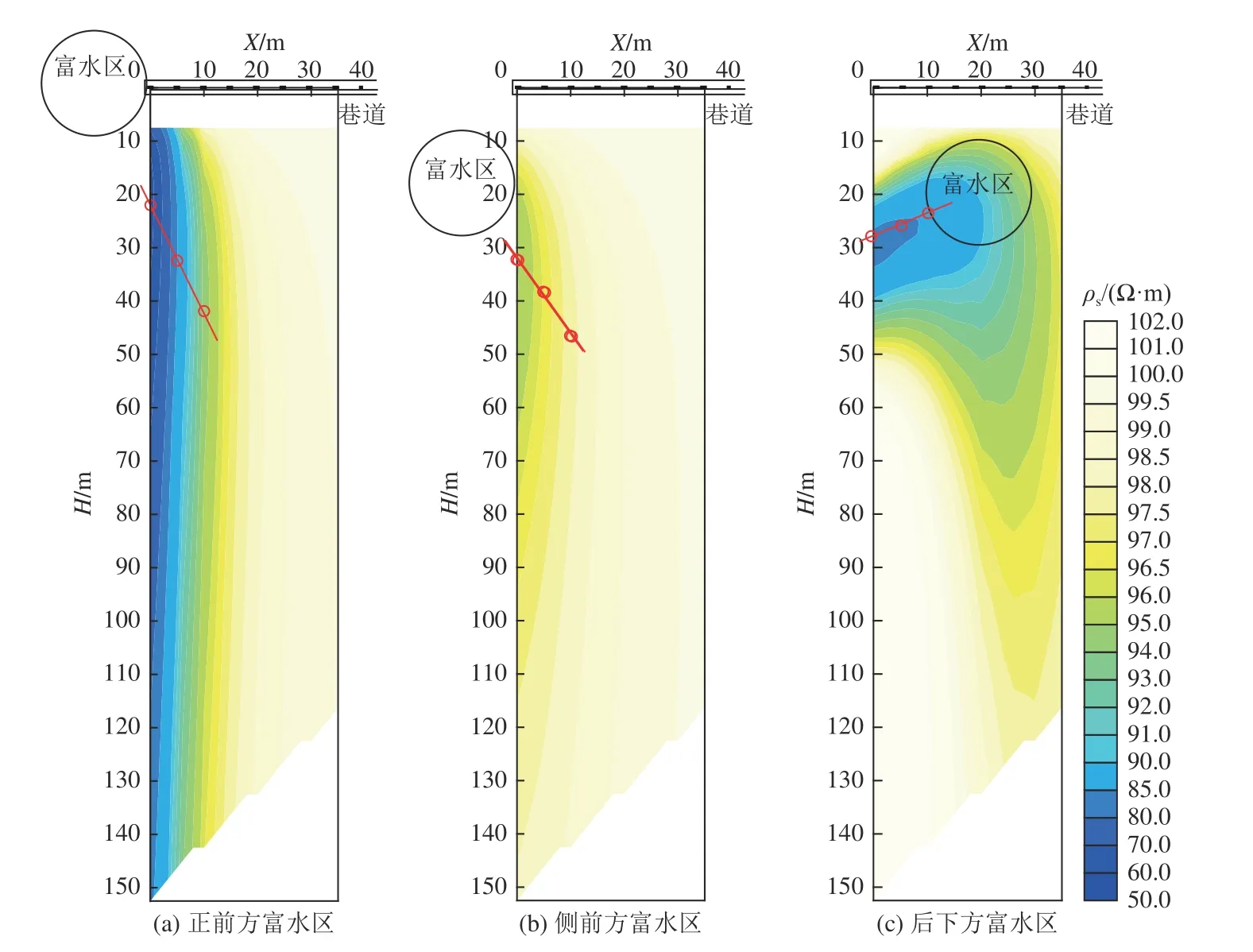
圖5 正演電阻率測深成像Fig.5 Resistivity sounding images derived from forward modeling
2.1 掘進工作面正前方
當富水球體中心位于掘進工作面正前方10 m 時(圖3a),根據式(1),依次可計算出1―9 號點電源正演視電阻率值ρsz(i,j)。
由各點電源電阻率測深曲線(圖4a)可見,各條曲線富水區均表現出相對低電阻率值特征。距離富水區位置較近的點電源電測深曲線(X≤10 m,X為距工作面距離),視電阻率值多小于95 Ω?m,明顯小于背景電阻率值;距離富水區位置較遠的點電源電測深曲線(X≥15 m),視電阻率值均大于97 Ω?m,接近背景電阻率值;隨點電源遠離掘進工作面位置,電阻率曲線最小值快速接近背景電阻率值。
在視電阻率測深成像圖(圖5a)上,近富水區點電源對應視電阻率值表現為顯著的低電阻率值特征。掘進工作面向后3 點電源電測深曲線最小值(圖5a 紅色線圈所示)連線斜率為2,該連線與電極測線延長線的交點為富水區位置。
2.2 掘進工作面側前方
當富水球體中心位于掘進工作面側前方(圖3b)時,位置為掘進工作面正前方10 m,偏離電極軸線20 m。根據式(1),依次可以計算各點電源正演視電阻率值。
由各點電源電阻率測深曲線(圖4b)可見,各條曲線富水區均表現為相對低電阻率值特征。距離掘進工作面位置較近的點電源電測深曲線(X≤5 m),視電阻率值有較明顯響應,最小視電阻率值為95~97 Ω?m;距離掘進工作面位置較遠的點電源電測深曲線(X≥10 m),視電阻率值均大于97 Ω?m,視電阻率值接近背景電阻率值。
在電阻率測深成像圖(圖5b)上,近富水區點電源對應視電阻率值表現為相對較低的電阻率值特征。掘進工作面向后3 點電源電測深曲線最小值連線斜率范圍為1~2,富水區位置在該連線的延長線上。
2.3 掘進工作面后下方
當富水球體中心位于掘進工作面后下方時(圖3c),位置為掘進工作面后方20 m,底板深度20 m。根據式(1),依次可計算出各點電源正演視電阻率值。
由各點電源電阻率測深曲線可見(圖4c),富水區范圍表現為較明顯的相對低電阻率值特征(83~98 Ω?m)。隨點電源遠離掘進工作面,電阻率曲線最小值逐漸升高;從掘進工作面位置到富水區中心位置的點電源電測深曲線(X≤20 m),視電阻率值有顯著響應,最小視電阻率值為83~90 Ω?m;隨電點源遠離富水區位置(X≥25 m),電阻率曲線最小值逐漸接近背景電阻率值。
在電阻率測深成像圖(圖5c)上,富水區影響范圍表現為顯著的低電阻率值特征(83~90 Ω?m)。掘進工作面向后3 點電源電測深曲線最小值連線斜率為負值;富水區位置在該連線的延長線上,為低電阻值范圍頂端。
以上分析可見,掘進工作面不同位置富水區均具有相對低電阻率值響應,在距掘進工作面不同距離的點電源電測深結果上具有規律性的視電阻率變化特征,特別是掘進工作面前方和后方的富水區視電阻率響應特征存在顯著的區別。利用多點電源電測深結果,可以快速判別掘進工作面是否存在相對富水區,判斷富水區是在掘進工作面前方還是后方。
3 數據處理與解釋
3.1 相關度參數計算
盡管根據各點電源電測深曲線和電阻率等值線圖可以判定是否存在富水區及其大致位置,但在實際應用探測中,受巷道條件、接地電極耦合等多種干擾因素影響,實測電阻率值有明顯的跳躍變化,難以準確識別巷道工作面前方富水區響應極值點[7],難以可靠地確定富水區位置。可以采用異常目標匹配濾波數據處理方法[23],通過與實測視電阻率資料進行比較來快速有效地確定異常目標位置。
該方法將多點電源范圍到掘進工作面前方一定距離(通常為100 m)向下一定深度(通常為50 m,根據實際情況探測深度可適當調整。)的空間,劃分為一系列“異常目標單元”(圖6),利用式(1)正演計算得到該異常目標單元的理論電阻率曲線,與實測電阻率曲線作相關度運算得到各目標單元的相關度值,由所有目標單元的相關度值可得到探測范圍的相關度成像圖。

圖6 目標單元網格剖分Fig.6 Target cell griding
由于異常目標匹配濾波法只比較正演曲線和實測曲線的相似程度,可將式(1)簡化為[23]:
采用此正演公式代替式(1),可以在不確定圍巖電阻率和異常體電阻率值以及異常體半徑的情況下,仍采用目標匹配濾波法進行資料處理與解釋,從而可以便捷地推廣應用。
對于任一目標單元(NX,NH),其相關度值計算方法為:首先以該目標單元中心坐標為低阻球體中心,按照實測各點電源電測深數據ρs(i,j)對應電極位置,按式(2)正演計算相應的理論視電阻率數據ρsz(i,j);然后計算該目標單元的相關度值Cor(NX,NH),計算公式為:
式中:ρsAV(i)為第i個點電源實測視電阻率平均值;ρszAV(i)為第i個點電源正演視電阻率平均值;K為每個點電源所測視電阻率數量;n為點電源數量。
利用自主研發的電法處理軟件,可以快速完成探測范圍的異常目標單元相關度值計算及相關度成像。
將圖4、圖5 中的富水區響應視電阻率值作為實測電阻率值數據,利用數據處理軟件進行異常目標單元剖分,計算各目標單元相關度值,可得到掘進工作面相應位置富水區的相關度成像結果(圖7)。掘進工作面正前方富水區范圍相關度≥0.8,與富水區位置吻合(圖7a);掘進工作面側前方富水區范圍相關度≥0.85,與富水區位置吻合,但高相關度值范圍比富水區模型范圍大(圖7b);掘進工作面后方富水區范圍相關度多大于0.7,與富水區位置較吻合,但高相關度值范圍與富水區模型范圍略有偏離(圖7c)。此結果表明,高相關度值范圍與富水區位置較吻合,采用異常目標匹配濾波法處理結果能夠有效地反映出富水區位置。
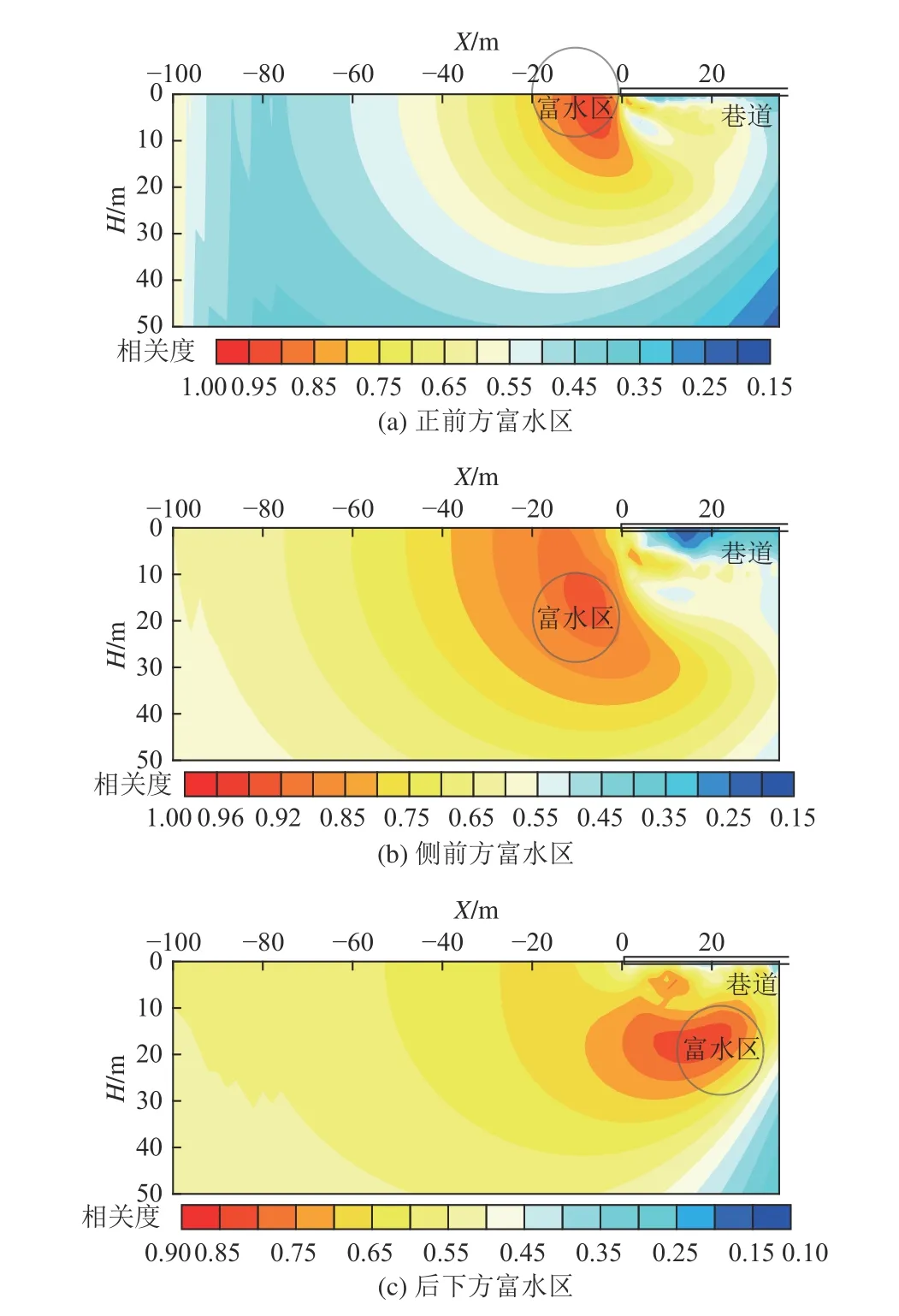
圖7 相關度結果成像Fig.7 Images of correlation results
3.2 視電阻率校正
受巷道空腔影響,近點電源視電阻率值明顯偏高[8,12,15];同時,煤系為層狀介質,電阻率值具有各向異性特征,礦井掘進工作面實測的各電點源電測深曲線包含了層狀介質電阻率特征[7];而電法超前探原理是基于均勻介質電性特征,因此,需對實測視電阻率曲線進行校正處理。采用比值法進行數據校正,可以有效消除巷道空腔及層狀介質各向異性影響。首先將掘進工作面所實測的n條點電源電測深曲線ρs(i,j)擬合成1條模板理論曲線ρT(j),計算公式為:
再將各點電源實測曲線ρs(i,j)除以該理論模板曲線,得到相應的各點電源電測深比值數據R(i,j):
該比值結果可以有效消除巷道空腔、層狀介質各向異性因素的影響。當R=1 時,無異常;當R>1 時,為高電阻率值異常,可能為無水裂隙區或高阻巖體;當R<1 時,為低電阻率值異常,可能為富水區。
4 應用實例
4.1 地質概況及數據采集
淮南礦業集團潘三礦12428 工作面,開采8 煤層,煤厚2~3 m。相鄰工作面曾揭露陷落柱,工作面所在采區斷層較為發育,相對富集砂巖裂隙水。因此,該工作面軌道巷道掘進時,可能會受到頂底板水害的威脅,需要探查掘進工作面前方富水區分布情況。采用多點電源高分辨電法進行探測。
軌道巷道掘進至Q10 測點前方60 m 時,使用并行電法儀采集數據,自掘進工作面向后布置32 個電極,電極間距5 m,1 號電極布置在巷道掘進工作面。采用AM法采集電法數據。以掘進工作面位置1 號電極為X軸原點,向巷道后方為X軸正向。
4.2 探測結果
對采集的AM數據文件進行數據解編,得到1—32 號電極依次供電時的單點電源電流和對應的電位值。提取1—8 號電極點電源探測數據,計算單極?偶極電阻率值結果,得到各點電源的視電阻率測深成像結果(圖8a)。由圖可見近點電源位置視電阻率值受巷道空腔影響明顯偏高,遠離巷道位置視電阻值相對較低,視電阻率值波動較大。
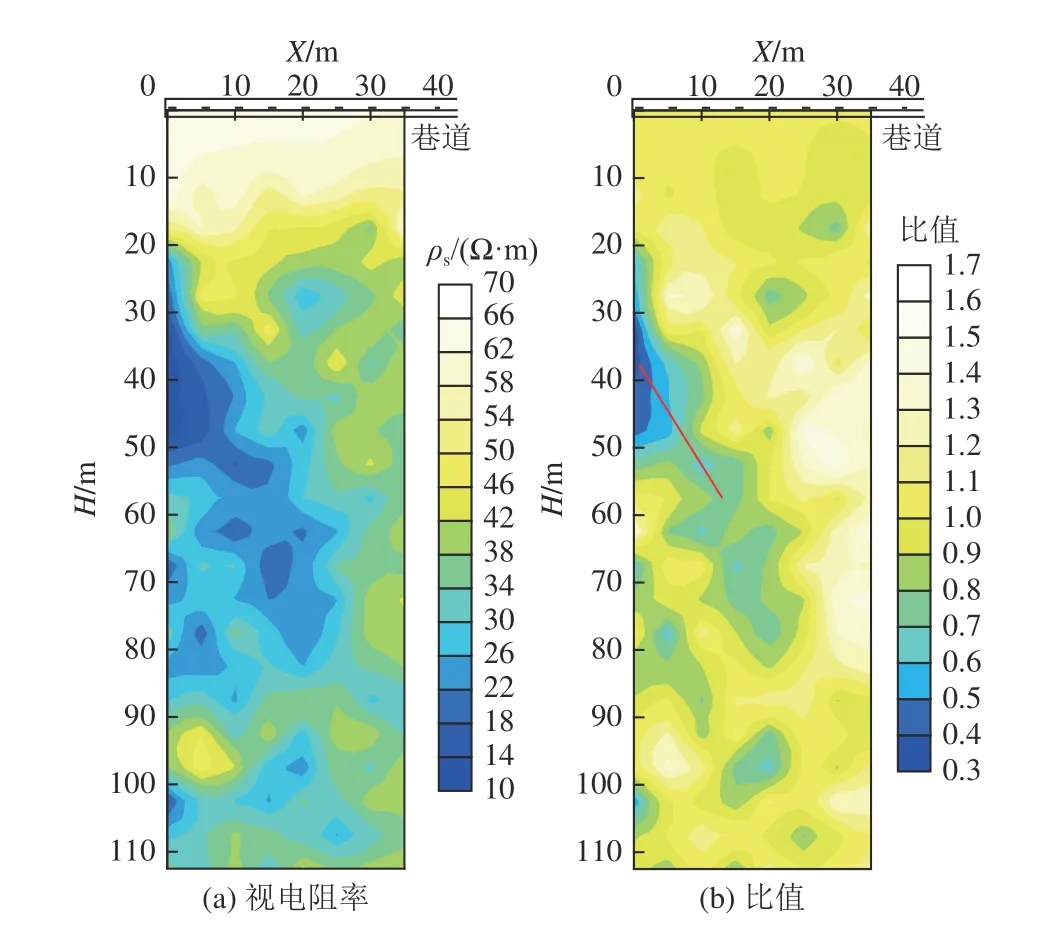
圖8 多點電源電測深結果Fig.8 Results of multipoint sources-based resistivity sounding
將1—8 號電極點電源電測深曲線擬合得到1 條模板理論曲線,根據式(3)對各條曲線進行比值校正,得到各點電源的電阻率比值測深成像結果(圖8b),該比值結果較好地消除了巷道空腔影響及層狀介質影響。圖中低比值范圍值為0.3~0.9,其軸線(紅色直線)呈正斜率(值約1.5),與側前方富水區電阻率響應等值線(圖4b)相類似,反映富水區中心位置位于掘進工作面側前方,巷道后下方無明顯富水區。
對掘進工作面后方多點電源范圍至巷道超前前方100 m、深50 m 范圍進行異常目標匹配濾波處理,處理數據為多點電源測深比值,得到探測范圍相關度成像結果(圖9)。由圖可見,高相關度值中心范圍位于巷道側前方,反映了富水區的中心位置。在巷道掘進前方10~58 m 范圍相關度值達0.80 以上,解釋為相對富水區影響范圍,其中15~40 m 范圍(相關度值0.84以上)為較強富水區范圍。
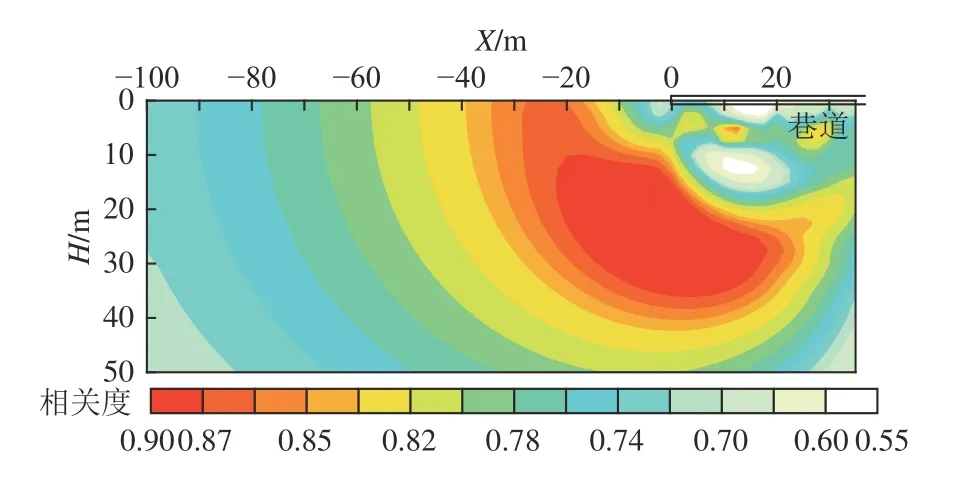
圖9 相關度成像Fig.9 Correlation image
巷道掘進后揭露探測掘進工作面前方10~60 m 范圍均為頂板滴淋水范圍(圖10)。其中掘進工作面前方15~40 m 范圍為斷層裂隙帶(圖10 藍色范圍),揭露4 條正斷層,主斷層為F4,產狀130°∠40°,落差h=3.0 m;巷道掘進至該范圍頂板嚴重淋水。巷道掘進揭露情況與多點電源高分辨電法探測解釋結果一致。
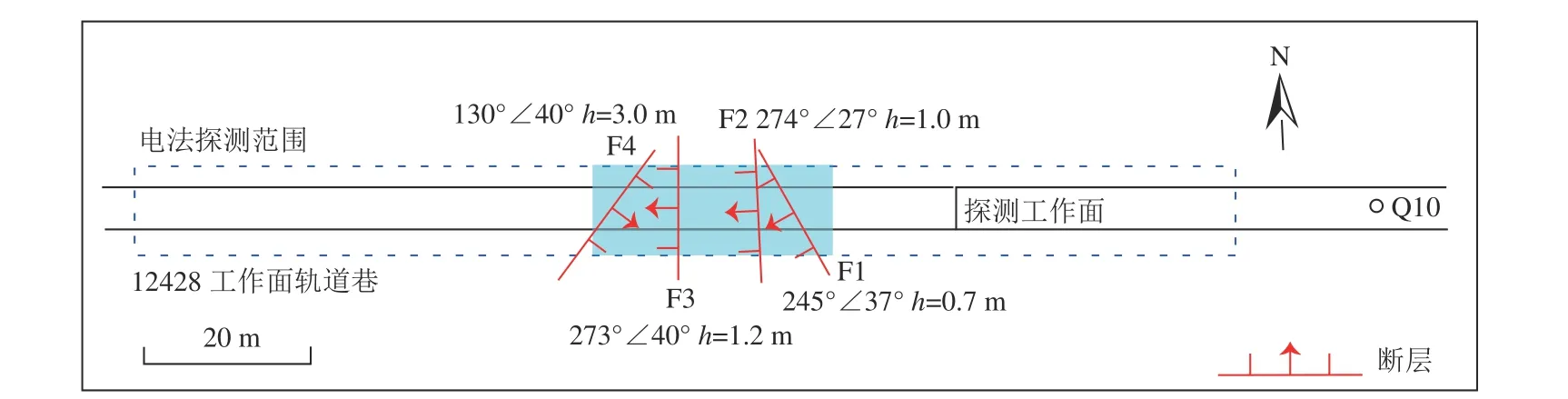
圖10 掘進巷道平面圖Fig.10 Plan of a heading roadway
5 結論
a.利用多點電源電測深數據可以更加客觀地擬合理論模板曲線,采用比值法校正,能夠較好消除巷道空腔及層狀地層影響因素對各點電源電測深曲線的影響。
b.掘進工作面正前方、側前方及后下方位置富水區在多點電源單極?偶極裝置電測深曲線及成像圖上具有不同的低電阻率值響應特征,利用實測的多點電源電測深結果能夠有效判識掘進工作面是否存在富水區,能夠初步判定富水區的位置。
c.采用異常目標匹配濾波方法對探測空間進行相關度運算,可得到掘進工作面前方及后方探測范圍相關度成像結果,其高相關值范圍能夠準確地反映富水區的空間位置。
