
滅火型消防無人機的地面站輔助瞄準方法
2024-01-09 05:09:22宋晨暉程子嘯
機電工程技術 2023年12期
關鍵詞:作業
宋晨暉,程子嘯
(廣州億航智能技術有限公司,廣州 510663)
0 引言
隨著城鎮化發展進程的加快,中心城市建筑密度不斷增加,垂直空間上持續增長的高樓成為了靚麗的城市風景線,但同時也帶來了巨大的消防隱患[1]。高層建筑的“煙囪效應”造成其火災具有破壞力大、撲救難度高、火災蔓延途徑多等特點,目前國內外對于高層建筑的火災撲救還依賴建筑內部的消防噴淋系統進行整體降溫,走火通道進行人員疏散,防火閘門進行物理隔斷,最后由消防員在外部使用云梯進行表面降溫,內部攜帶裝備徒步攻堅的方式進行撲救的方法[2-3]。因此,高層建筑的滅火救援一直是世界難題,給消防救援工作帶來巨大的挑戰。
傳統的云梯消防車模式受制于云梯高度限制,其噴射高度、舉升高度有限,加之消防車通道被占、展開環境受限、展開時間較長,許多火災現場都有撲救不及時的情況發生。同時此模式的設備使用和維護成本巨大,價格動輒千萬元以上,配置數量極為有限。隨著無人機技術的快速迭代,應用場景擴大,消防無人機作為消防救援活動的補充裝備應運而生[4-5]。輔助型消防無人機主要攜帶特種攝像裝備,將高處火災情況通過攝像頭、紅外雙光攝像機等設備實時傳至地面消防作業人員,輔助消防作業人員定位火災地點,為滅火方案制定研判依據,降低人員偵察帶來的風險因素,避免人員進入有毒、易燃等危險環境。滅火型消防無人機主要攜帶滅火消防設備,在火災現場執行高空消防作業,其載重一般在50~100 kg;載荷種類根據作業任務不同有水劑、干粉、滅火投擲彈等;其作業方式均為水平噴射或水平投擲;作業距離受噴射功率及滅火劑彌散性能的影響,在5~15 m不等;其作業目標為高層帶窗建筑,通過對建筑窗口內噴射滅火劑將室內火勢進行控制[6]。
通過使用消防無人機第一時間到達火場,對起火點進行偵察研判并實施精準撲滅,實現對高層建筑火災的“查早、打早、滅早”,并能夠有效保障消防員和現場受困人員的生命安全[7-8]。
當前常見消防無人機作業模式通常為攜帶裝備到現場展開作業的操作方式,即消防員到達火災現場后就地展開無人機,在現場使用遙控器控制無人機并對火災場地進行初步偵察,確定起火位置后再使用滅火型無人機進行作業[9],其作業瞄準操作使用遙控器進行:操作員通過無人機搭載的攝像頭所拍攝實時圖傳與現場自身目視情況進行對比校正瞄準。由于高層建筑的火災現場作業區域脫離目視范圍情況較多,使用遙控器手動瞄準容易產生目視偏差,觀瞄準確度依賴現場執飛者經驗。因此需要找到一種適用于遠程控制瞄準的方法予以校正以提高滅火的精準性。基于此,本文對以上問題展開研究。
1 輔助瞄準方法原理
筆者所在團隊研制了一款大載重滅火型消防無人機,其具有快速響應、大載重、多種載荷配合作業的特點。預期用于高層建筑火災的消防應用,主要面向場景為消防車云梯所無法觸及的高層建筑火災。得益于大載重優勢特性,其載荷為100 kg 水劑/粉劑滅火劑,同時搭載破窗滅火彈6 枚,搭配4G 無線通信系統與地面控制站進行操縱。使用水平噴射方式對高層建筑室內火災進行滅火作業[10]。
滅火水劑/粉劑噴嘴固定安裝于無人機前向方位,作業有效范圍為一固定值;同樣安裝于無人機前向方位的可見光攝像頭則可以無人機視角采集現場畫面。使用地面控制站進行輔助瞄準方法的具體方法原理為:根據攝像機凸透鏡成像原理[11],在已知機載攝像機焦距f 的前提下,通過地面控制站計算傳輸到操作終端顯示屏中實時畫面的各要素相對位置關系,從而推算物理成像平面中真實物體的相對位置關系,如圖1 所示。通過該推算真實物體位置關系結合無人機環境感知數據(包括無人機當前實時坐標位置、無人機當前位置與建筑物或障礙物的距離),經換算轉化為無人機控制坐標系中的位移控制輸入指令,使無人機根據指令移動至目標位置點。
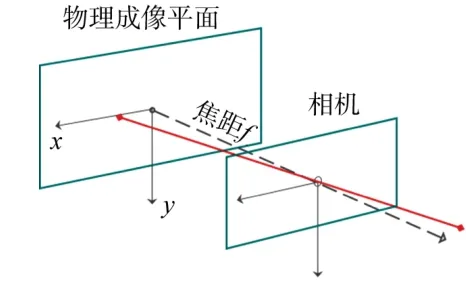
圖1 攝像機凸透鏡成像原
2 系統構建
滅火型消防無人機系統的構建包括機身結構系統、機載系統、地面控制站[12]。機身結構系統主要為滅火劑載荷提供裝載平臺,為其他機載設備提供安裝和工作條件,并把這些部件載荷有效的分配和傳遞,使之達到受力平衡。機載系統由飛行控制、障礙感知、能源供給、動力裝置、通信組件所構成[13]。飛行控制處理外部輸入的飛行指令,通過傳感器感知速度、高度、姿態、位置信息,實現對飛機空間位置和飛行狀態的控制;障礙感知為多組激光雷達及前向可見光攝像頭,激光雷達工作朝向覆蓋飛行作業方向,用于探測距飛機100 m 范圍內的典型障礙物(如建筑外立面),攝像頭用于提供作業過程中的實時圖像,并為操控員對飛行控制指令的輸入提供視覺參考;能源供給為多組鋰離子動力電池,提供飛行控制與機載系統工作所需能源;動力裝置接收飛行控制系統輸入指令并使用能源供給系統提供的能量,實時調節多組螺旋槳的轉速,實現整機飛行;通信組件通過商用4G移動通信網絡與地面控制站建立數據鏈,向機載系統傳輸人工指揮和控制指令,同時也向地面控制站傳輸實時圖像數據。地面控制站綜合處理機載系統回傳的各項關鍵飛行參數,并以特定人機交互界面向操控員提供飛機的實時飛行數據、地理位置信息、圖像采集信息、作業掛載工況信息。系統架構如圖2 所示。

圖2 滅火型消防無人機系統架構
3 輔助瞄準及計算過程
3.1 飛行控制
將滅火型消防無人機部署于城市中特定位置的消防站點,以該站點為中心負責管控半徑5 km內的所有高層建筑。消防站配置合適的起降場地,供滅火消防無人機直接在站點快速起飛,近距離飛往轄區內的高層建筑附近[14]。
起飛后可對該無人機進行遠程控制,在消防員地面出動到達現場之前提前偵察,向地面回傳數據并執行滅火作業。
3.2 態勢感知
無人機到達現場后操作員首先利用位于機身前方的可見光攝像頭對現場進行態勢研判,手動控制爬升/下降至對應起火點高度。使無人機靠近建筑物外立面約20~30 m處。機載雷達識別的障礙物數據回傳至地面控制站,并在地面控制站的地圖界面上形成散點分布。操作員通過散點分布狀態可判斷建筑物外立面輪廓形態。結合可見光攝像頭回傳的圖像信息增加現場環境認知。
3.3 鎖定方位
操作員通過地面控制站開啟輔助瞄準功能。此時飛機攝像頭將會進入前向鎖定模式,攝像頭回傳的圖像將與飛機前向噴嘴保持相對固定的狀態。操作員在地面控制站的地圖界面根據機載雷達識別到的障礙物數據繪制建筑物外立面輔助參考線。通過該輔助參考線,地面控制站可獲知飛機當前朝向方位與建筑物外立面參考線、外立面參考線垂直法線的夾角關系。如圖3 所示,虛線段“噴嘴指向方位”代表飛機當前朝向方位,虛線段“人工繪制輔助線”代表建筑物外立面參考線,滅火作業點為預期到達的作業方位。
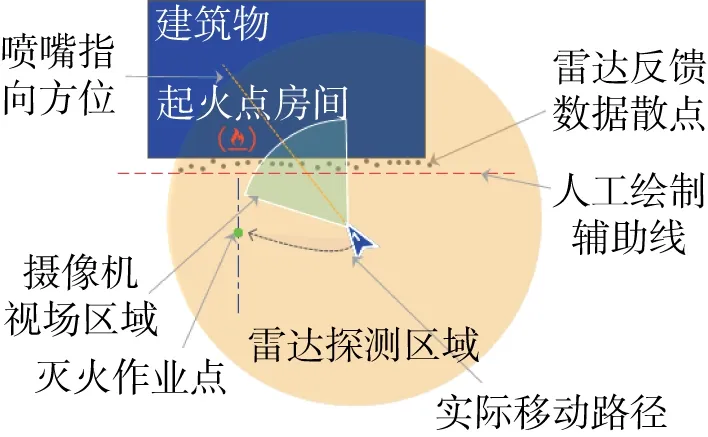
圖3 滅火作業平面示意圖
3.4 獲取瞄準方位夾角
進行輔助瞄準計算的第一步需獲取視場內瞄準方向與無人機當前朝向的方位夾角。機載攝像頭此時為前向拍攝模式,根據機載攝像機鏡頭的水平及垂直可視視場角(∠FOV)度數(∠FOVx水平視角、∠FOVy垂直視角),結合已知攝像頭回傳的圖像分辨率水平及垂直像素點P(Px、Py),當操控員在地面控制站人機交互界面實時圖像傳輸畫面中點擊需要瞄準的滅火位置時,地面控制站記錄交互界面上位置點M坐標,得出M點距畫面中心O點的像素距離X′與Y′,根據三角形性質結合已知圖像分辨率P 與可視視場角∠FOV 可得∠M,最終可得圖像畫面中瞄準方位與攝像機CMOS 傳感器的水平夾角∠C(圖4)。受限于攝像機有限視場角范圍,獲取瞄準方位夾角僅適用于可被攝像機拍攝到的圖像內點位。
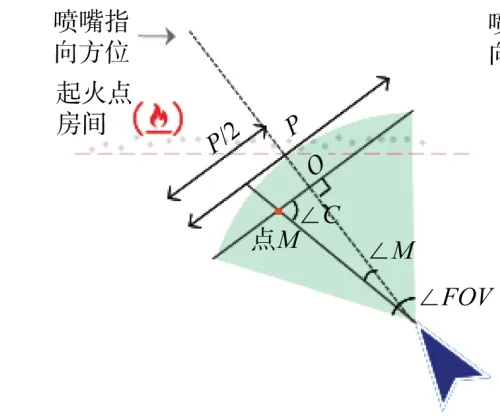
圖4 攝像機視場示意
3.5 計算瞄準點位與無人機距離
除獲取瞄準方位夾角以外,還需根據無人機環境感知數據計算無人機當前位置距離瞄準點位(起火點)的實際距離。根據前述系統構建中內容,無人機搭載了機載前向測距雷達,操作員可通過機載雷達讀數在地面控制站直觀地識別障礙物或建筑外立面輪廓,并以此在地面控制站的地圖仿真界面中根據建筑外立面輪廓設定該建筑的輔助參考線。則地面控制站可通過輔助線、夾角∠C計算無人機當前經緯度坐標與瞄準目標點的水平距離關系S(圖5)。
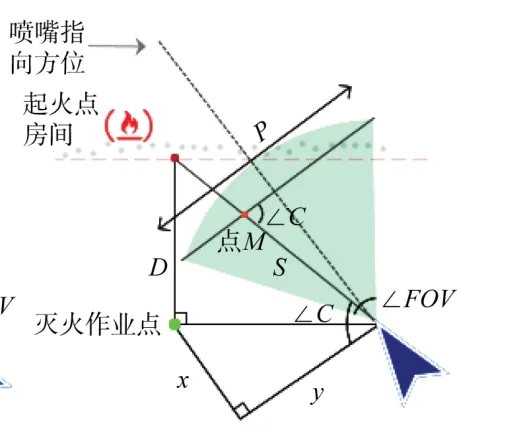
圖5 滅火作業點移動示意圖
以下給出一種通過地面控制站軟件接合內置地圖經緯坐標系計算距離S 的方法。以無人機當前位置作為坐標系原點的情況下,操作員在地圖設定的輔助參考線可表示為(結合地圖經緯度,則系數均為已知狀態):
而根據∠C(水平)可得在該無人機坐標系下,滅火目標點與無人機當前位置連線的表達為(系數已知):
聯立方程可得滅火目標點在無人機坐標系下的水平坐標T(xT,yT):
則該距離S為:
3.6 換算無人機位置控制指令
結合無人機搭載噴管的有效作業射程,可設定無人機預期滅火作業點垂直向距瞄準目標點(起火點)的距離為D(圖5)。此時瞄準目標點、滅火作業點、無人機當前位置在水平面內形成了一個三角形,且滅火作業點與瞄準目標點的連線位于建筑外立面輔助參考線的垂直法線上。已知滅火目標點與無人機水平距離S、預設滅火距離D、∠C(水平),根據三角函數可計算無人機距離滅火作業點所需最短移動距離,并依照該最短移動距離換算為無人機坐標系下拆分位移量x,y。地面控制站通過向飛行控制系統發送位移指令(x,y)使得無人機自動移動至滅火作業點,調整偏航角度指向建筑外立面輔助參考線的垂直法線,且使得無人機懸停在最佳作業距離待命。輔助瞄準及計算流程如圖6 所示。
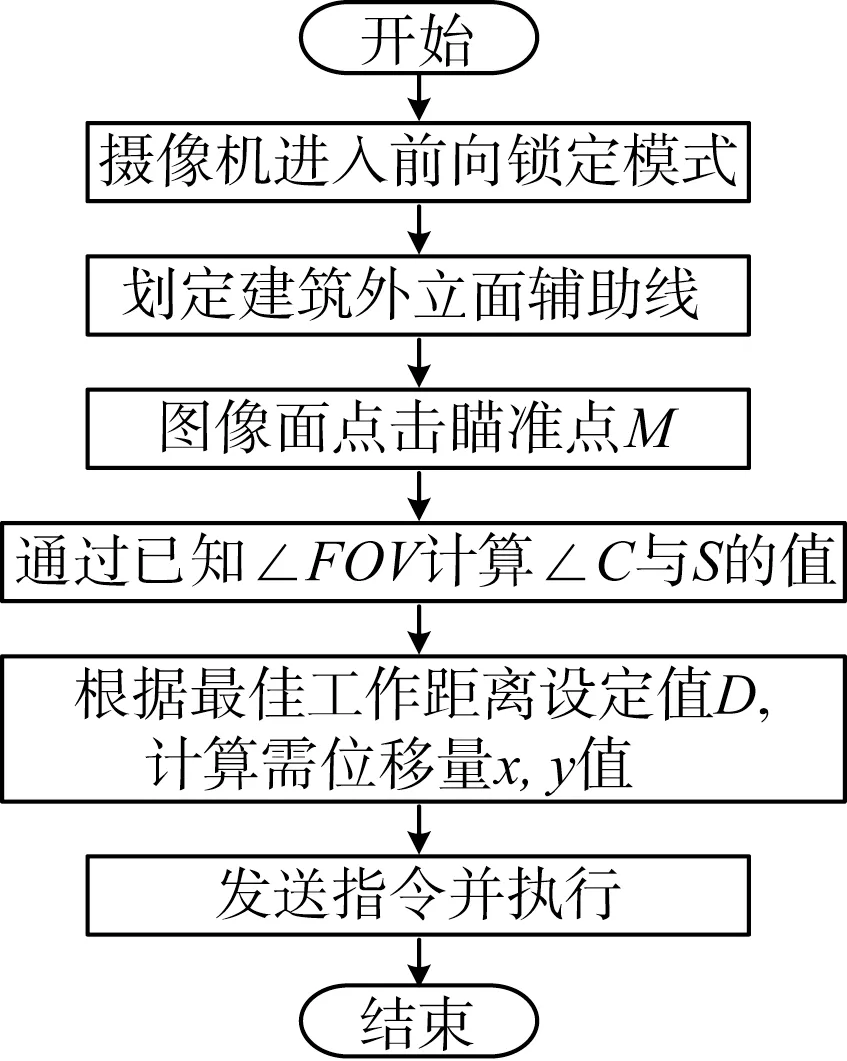
圖6 計算流程
3.7 開始作業
操控員通過地面控制站擊發機載水平發射滅火裝置,利用前部的滅火彈將房間從外部打開缺口,并讓滅火彈體在房間內引爆,進行小范圍撲滅。使用水平高壓噴管將機載滅火劑由缺口處灌入房間,對房間進行撲救,噴灑完畢后空機返回。
4 測試驗證與結果分析
使用該大載重滅火型消防無人機(型號EH216-F),裝載100 kg水基滅火劑,結合上述地面站系統輔助瞄準方法,協同改進了機載系統及地面控制站的配套功能[15],并在實際試驗中取得了良好的瞄準效果。經測試,EH216-F從瞄準操作的動作開始到無人機移動至最佳滅火工作點的平均時長約為15 s,無人機到位后噴灑作業效果能夠覆蓋試驗場地房間窗口(圖7)。操作員通過視頻信息實時監測火場信息,經幾步簡單點擊操作節省了作業過程中大量寶貴的調整時間,降低了操作員在操作大載重無人機時的工作負荷,提升了滅火型消防無人機在運行時的安全性及可用性。試驗證明了該消防無人機地面站輔助瞄準方法總體架構設計合理,操作功能正常[16]。

圖7 地面控制站界面及作業試驗
5 結束語
本文根據高層建筑滅火救援的痛點與難點,總結消防無人機存在的應用問題:滅火救援的現場作業使用遙控器進行瞄準操作,通過實時圖像與目視對比進行微調,全過程均極依賴操作員的個人經驗,面對高層建筑火災現場易產生偏差。據此本文提出了一種通過地面控制站輔助瞄準方法的設計研究。構建一種無人機系統,并利用環境感知系統與地面控制站的功能結合,根據攝像機成像原理通過地面控制站人機交互界面中對瞄準方位的記錄,推算瞄準方位夾角;操作員在地面控制站觀測環境感知數據并設定建筑外立面輔助線,由地面控制站計算瞄準點位與無人機當前距離;根據無人機噴灑作業有效距離換算無人機最佳作業點位,并將控制指令發送至無人機飛控系統。在實機驗證試驗中實現了良好的瞄準效果,整機平均移動時長15 s。有效節省了作業調整時間,降低操作人員工作負荷,取得令人滿意的結果。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
