振動式根莖類中藥材收獲機挖掘裝置設計
2024-01-09 10:08:06祁玉卓張亞振張冰輝
農機化研究 2024年4期
關鍵詞:振動
陳 林,祁玉卓,高 波,張亞振,張冰輝
(1.河北省農業機械化研究所有限公司,石家莊 050070;2.河北農業大學 機電工程學院,河北 保定 071000;3.安國市輝騰農機具制造有限公司,河北 安國 071200)
0 引言
我國中藥材種植歷史悠久,在預防醫療、治療疾病和人體保健等方面發揮著越來越重要的作用[1-3]。目前,我國的中藥材以規模化種植方式為主,且根莖類中藥材收獲作業在中藥材全程機械化作業中任務最重,機械化水平也最高[4-5]。在實際作業時,通常采用兩步法完成收獲作業,即先剪除植物地上莖葉部分、再挖取地下根莖部分[6-9]。一般而言,中藥材適宜生長在排水性好的土壤條件下,通常在每年的春秋兩季耕地保持足夠干燥的條件下進行作業。
我國對中藥材收獲機械的研究起步較晚,隨著研究的開展,先后開發出不同種類的根莖類中藥材收獲機型,如4GJ-800型多功能根莖收獲機、4WZ-140型根莖類中藥材振動挖掘機、4Y-1200型藥材收獲機。上述機型采用曲柄搖桿機構驅動振動鏟進行振動挖掘,入土阻力小,深度適應性較好,但土壤破碎分離能力較差,挖掘過程中容易造成擁堵現象[10-12],故不適合在土壤含水率較高的地塊工作。這是因為土壤含水率高,工作阻力增大,影響工作效率。
華北平原長期處于缺水狀態,在開展中藥材作業時地塊含水率適中,開展收獲作業比較順利。2021年夏秋季降雨量遠高于歷年,很多地塊由于積水造成輪式拖拉機無法下地開展收獲作業,影響了一些作物的收獲,中藥材收獲也遇到了同樣的問題。除了引入履帶式拖拉機或加裝履帶裝置等措施外,挖掘鏟部件的設計及參數制定也要面臨土壤含水率增大后的耕作阻力加大等新問題。為此,本文設計了一款振動式根莖類中藥材收獲機。
1 結構組成及工作原理
1.1 結構組成
收獲機主要用于根莖類中藥材的挖掘收獲,由三點懸掛裝置、振動挖掘裝置、藥土分離裝置、變速箱、傳動裝置等組成。主要技術參數如表1所示,樣機結構如圖1所示。
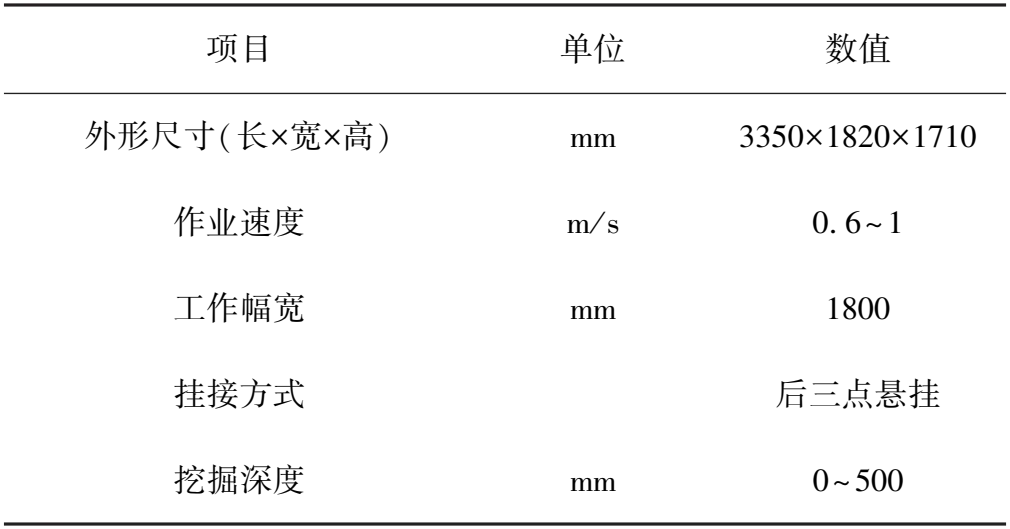
表1 收獲機主要技術參數
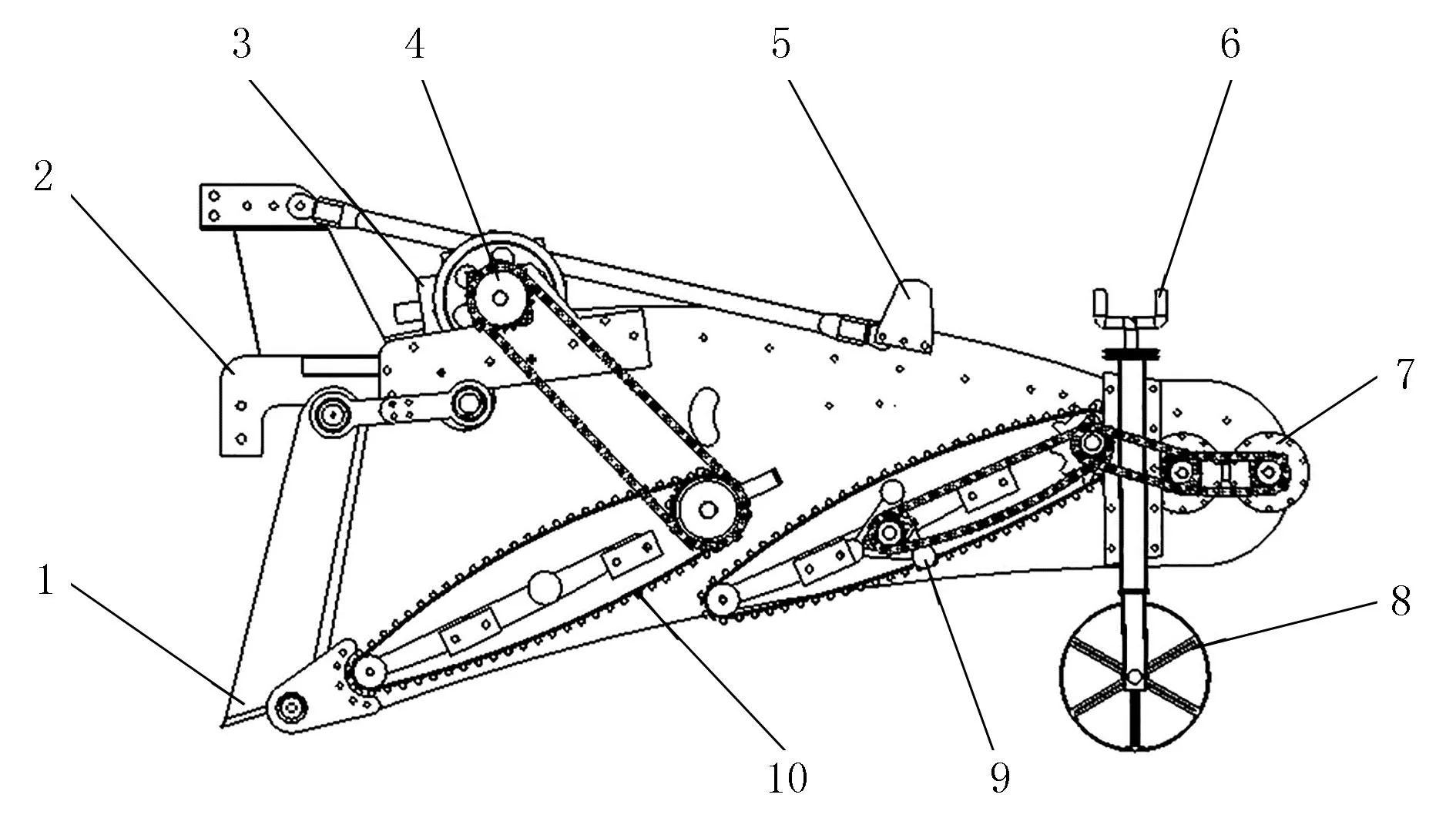
1.挖掘鏟 2.三點懸掛裝置 3.變速箱 4.主傳動軸 5.機架 6.限深輪調整裝置 7.后滾裝置 8.限深輪 9.輸送導向軸 10.分離篩圖1 收獲機整機結構示意圖Fig.1 Schematic diagram of harvester structure
1.2 挖掘裝置組成
振動挖掘裝置主要由變速箱、主傳動軸、皮帶輪(大、小)、前偏心軸、前拉臂、前軸和挖掘鏟等零件組成,如圖2所示。
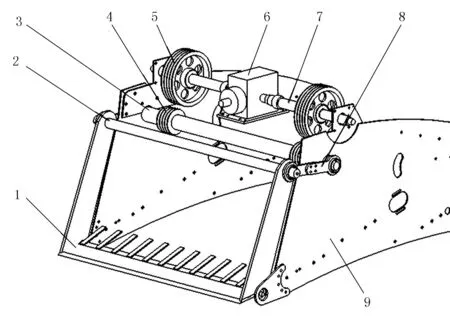
1.挖掘鏟 2.前軸 3.前偏心軸 4.小皮帶輪 5.大皮帶輪 6.變速箱 7.主傳動軸 8.前拉臂 9.側板圖2 挖掘裝置結構示意圖Fig.2 Schematic diagram ofminingdevice
1.3 工作原理
田間作業時,機具通過三點懸掛掛接在拖拉機后方,拖拉機動力輸出軸輸出的動力經變速箱傳遞至主傳動軸,主傳動軸經過皮帶傳動帶動前偏心軸轉動;然后,動力通過振動機構轉化為挖掘鏟的周期性振動,挖掘鏟的周期性振動給土壤施加交變載荷以振松土壤;隨著拖拉機的前進,可以實現藥土的初次分離。
主傳動軸和前偏心軸之間選用皮帶傳動的原因是:收獲機工作時,挖掘鏟會不斷受到沖擊載荷,皮帶傳動可以起到緩沖作用;當挖掘鏟遇到障礙物時,皮帶傳動也可以通過打滑來防止系統過載,起到保護系統和零件的作用[13]。
2 挖掘鏟設計
2.1 挖掘鏟結構設計
挖掘鏟在形式上可以分為固定式挖掘鏟和振動挖掘鏟。其中,固定式挖掘收獲裝備普遍存在牽引阻力大、耗能高、效率低的問題[14];而振動式土壤切削挖掘是一種重要的降低阻力的途徑。自20世紀中期以來,國內外學者針對振動式土壤作業機具做了大量的理論與試驗研究,研究結果和實際應用表明:相比傳統土壤作業方式,振動式切削挖掘能夠起到降低牽引阻力及提高機械效率的作用[15-17]。本文采用振動條形挖掘鏟,結構如圖3所示。
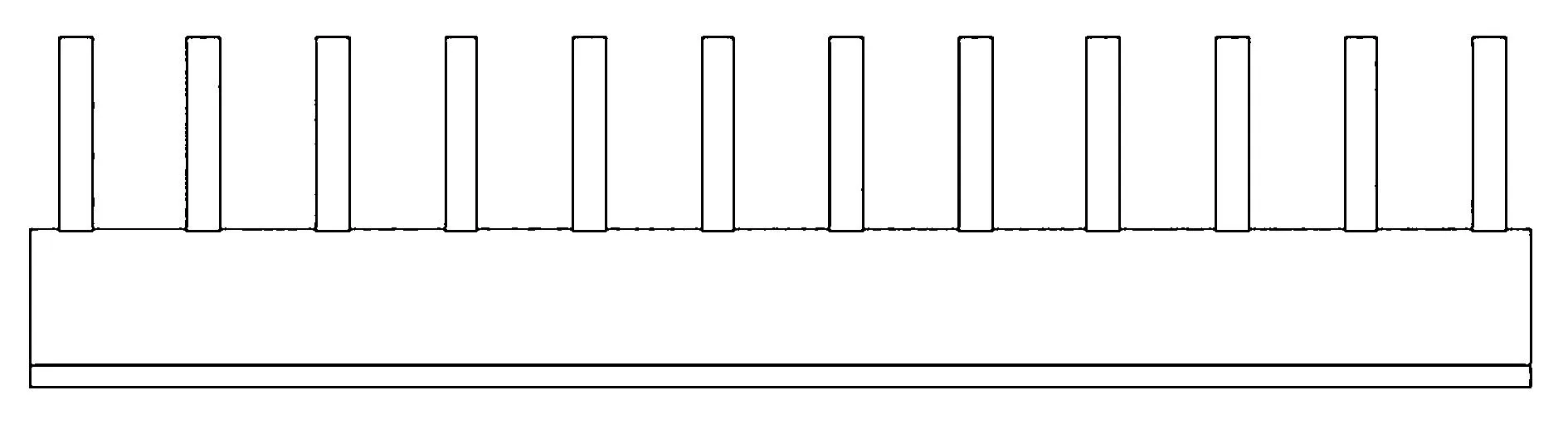
圖3 挖掘鏟結構簡圖Fig.3 Structure diagram ofdigging shovel
挖掘鏟由鏟刃、鏟體和導桿組成,設計鏟型為條形鏟,鏟體后端設置有等間距導桿。振動式條形鏟與土壤接觸面積更大,受力均勻,深度適應性好,入土阻力小,適合根莖類中藥材的挖掘。工作過程中,條形鏟在拖拉機的牽引下切入土壤,對藥土混合物進行振動挖掘,最終藥土混合物通過振動在導桿進行初步分離,土壤掉落地面,藥材根莖被送至收獲機的分離裝置進行進一步的藥土分離。
2.2 挖掘鏟主要參數確定
挖掘鏟主要結構參數包括鏟寬B、工作深度H、入土角α和工作長度L,如圖4所示。
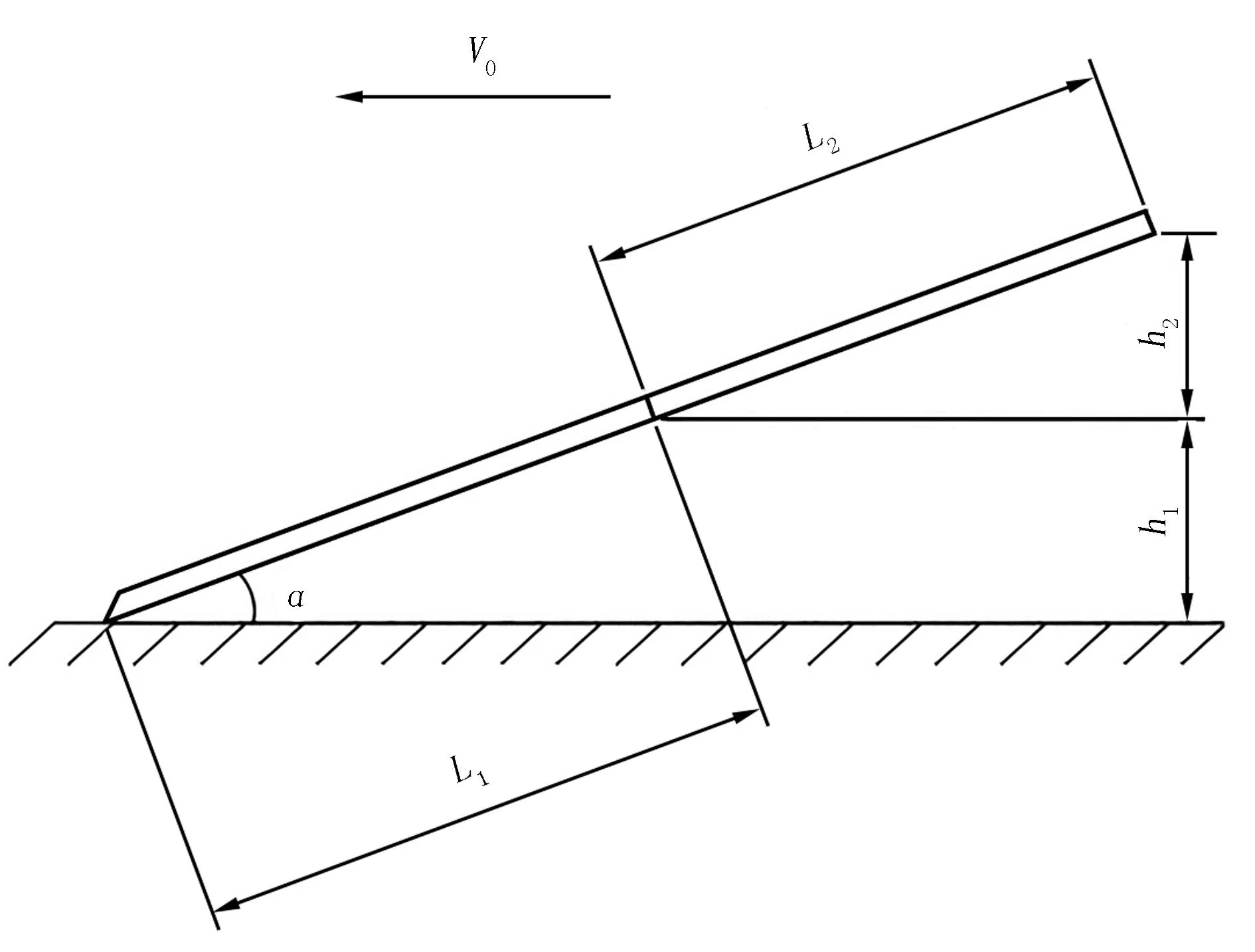
圖4 挖掘鏟示意圖Fig.4 Schematic diagram ofdigging shovel
1)鏟寬B。鏟寬與收獲機工作幅寬相等。根據文獻資料可得,幅寬主要與藥材在地下的分布情況、長勢、藥材種植的行距和株距、收獲機的工作路線偏差有關。本設計中,鏟寬初步確定為1800mm。
2)工作深度H。根據根莖類中藥材的生長特性,大部分根莖類中藥材的生長深度為5~43cm,藥材直徑為0.5~6cm[18]。由于藥材根莖分布不均,為保證收獲機的收獲質量,避免因破環中藥材根莖的完整性導致藥材的藥用價值和經濟價值下降,應保證挖掘鏟的挖掘深度大于50cm。
3)入土角α。挖掘鏟入土角的選擇與鏟的挖掘阻力、挖掘深度和挖掘鏟的碎土能力有重要關系。為得到合適的入土角,對鏟上藥土混合物進行受力分析,如圖5所示。
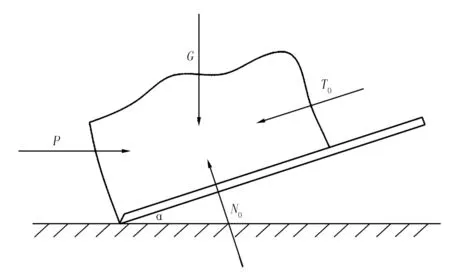
圖5 鏟上藥土混合物受力分析Fig.5 Stressanalysisofstemsoilmixture
根據圖5建立如下方程,即
Pcosα-T0-Gsinα=0
(1)
N0-Gcosα-Psinα=0
(2)
T0=N0tanφ
(3)
式中T0—挖掘鏟對土壤的摩擦力(N);
N0—挖掘鏟對土壤的支持力(N);
P—沿著挖掘鏟移動掘起物所需要的力(N);
G—鏟上藥土混合物重力(N);
φ—摩擦角(°);
α—入土角(°)。
由式(1)、式(2)可得挖掘鏟入土角α為
(4)
由式(4)可知:入土角α與沿著挖掘鏟移動掘起物所需要的力成正比,即入土角越小,挖掘阻力越小,則挖掘鏟的入土性能較好,但挖掘鏟的碎土能力降低,挖掘深度減小,且更容易產生壅土現象;反之,入土角越大,鏟的挖掘阻力會增大,但挖掘深度和碎土能力會增加。綜上所述,兼顧本次挖掘鏟的設計目的,選擇挖掘鏟入土角為20°[19]。
4)工作長度L。挖掘鏟的工作長度L分為兩部分,包括鏟體長度L1和導桿長度L2。因為鏟體的主要作用是挖掘藥土混合物,所以鏟體的長度可以通過鏟體入土角和鏟體的平均挖掘深度得出。導桿的作用是使藥土混合物沿導桿向后運動,所以在收獲機工作過程中被挖掘的藥土混合物的全部動能等于其被提升h2高度做功和在導桿上移動L2距離的摩擦力做功之和。因此,導桿長度L2可以根據能量守恒定律計算,即
(5)
E動=WG+Wf
(6)
(7)
FNμ=mgsinα1·tanφ
(8)
由式(2)~式(4)可得
(9)
式中L1—鏟體長度(m);
h1—挖掘鏟平均挖掘深度(m);
α—挖掘鏟入土角(°);
v0—收獲機前進速度(m/s);
g—重力加速度(m/s2);
h2—導桿的垂直高度(m);
φ—藥土混合物和導桿的摩擦角(°);
L2—導桿長度(m)。
收獲機工作過程中,機器前進速度v0=1m/s。查閱農業機械設計手冊后,可知重粘土對鋼的摩擦角為31°~42°,選取藥土混合物和導桿的摩擦角為31°。通過以上各式計算可得:L1=190mm,L2=93mm。因此,挖掘鏟總長度L=L1+L2=283mm。
3 偏心振動機構設計
將振動挖掘鏟簡化為平面運動簡圖,如圖6所示。圖6中,AB為鏟體,A為鏟尖,B點為鏟體和機架的鉸接點,BC是與鏟體焊接的立桿,CD為連桿,DE為偏心軸,E為偏心軸旋轉中心。BD兩點位置由機架確定:已知LBD=1065mm,連接BD兩點作為輔助線。根據整機尺寸初步確定兩搖桿LBC=830mm,LCD=410mm,設偏心距為e。根據曲柄搖桿機構的運動規律,可以得到兩個極限位置如圖6所示。圖6中,AB為挖掘鏟的上極限位置,此時C、D、E三點共線;A1B為挖掘鏟的下極限位置,此時C1、E、D三點共線。
設計中,為了使得振動鏟通過振動來減小挖掘阻力又不會因為溝底不平度過大而影響挖掘鏟收獲質量,將挖掘鏟鏟尖振幅a設定為10mm,據此來確定偏心距e。為了達到該預設值,需要先計算鏟體AB的擺動角度。AB的擺動角度計算公式為
(10)
在挖掘鏟參數確定的理論計算中已知鏟體長度LAB=190mm,由式(10)可得∠A1BA約為0.0526rad。
在三角形BCE中,有
(11)
在三角形BC1E中,有
(12)
∠CBE-∠C1BE=∠CBC1
(13)
因為∠CBC1=∠A1BA,綜合式(10)~式(13)可得:e≈20mm。所以,要使鏟尖振幅為10mm左右,偏心軸偏心距應設置為20mm。
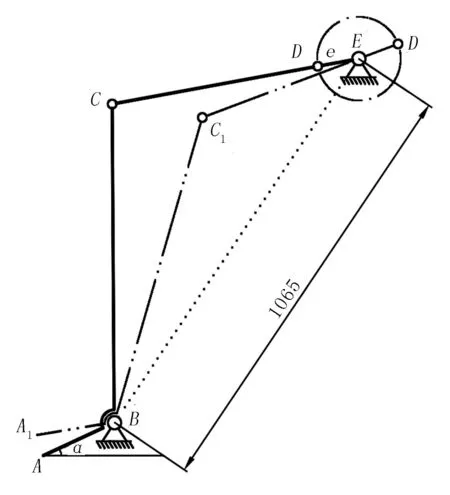
圖6 振動機構簡圖Fig.6 Sketch of vibration mechanism
4 挖掘鏟有限元分析
4.1 受力分析
收獲機工作時,假設其滿足以下條件:①挖掘鏟鏟面都參與工作;②鏟上土壤平均分布,密度均勻;③挖掘鏟挖掘深度(50mm)穩定。在這些條件下,鏟上藥土混合物受力分析如圖5所示,挖掘鏟鏟體受力如圖7所示。
鏟上土壤重力計算公式為
G=SLρg
(14)
式中S—土壤的沉切面積(m2);
L—挖掘鏟長度(m);
ρ—土壤密度(kg/m3)。
聯立式(1)、(2)、(3)、(14)可得:鏟上土壤重力G=4021.9N,沿著挖掘鏟移動崛起物所需要的力P=4926.6N,挖掘鏟對土壤的支持力N0=5455.6N,挖掘鏟對土壤的摩擦力T0=3273.4N,通過作用力與反作用力原理可得:挖掘鏟受力N1=5455.6N,T1=3273.4N。
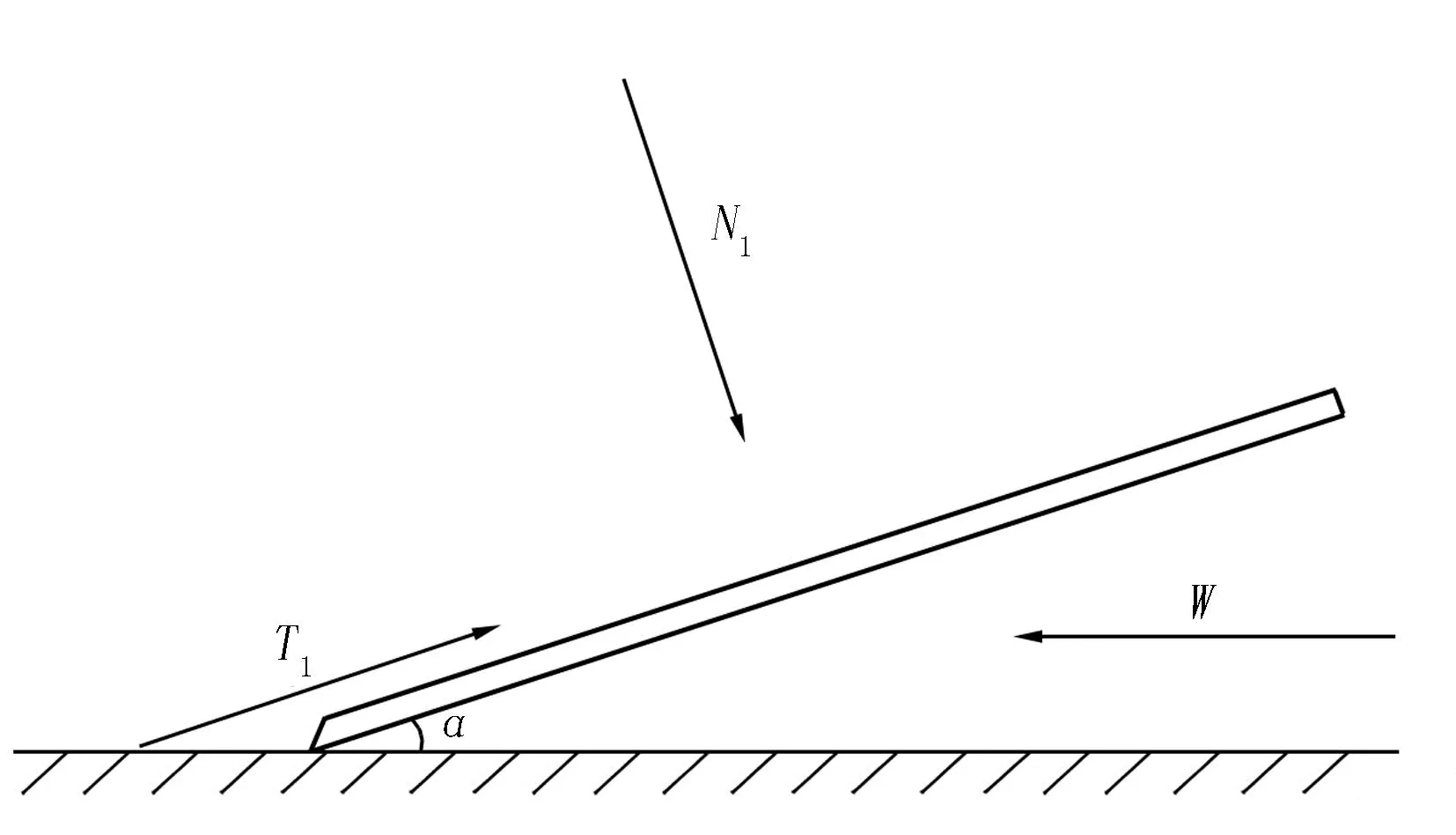
圖7 鏟體受力分析Fig.7 Stressanalysisofdigging shovel
4.2 模型創建與網格劃分
根據上文得到的挖掘鏟工作過程中受力的最大值,對挖掘鏟進行靜力學分析。在SolidWorks軟件中建立挖掘鏟鏟體的三維模型,保存成*.x_t格式后導入ANSYS Workbench中。選取挖掘鏟鏟體的材料為普通碳素鋼(Q235),該材料屈服強度為235MPa。
對挖掘鏟鏟體進行網格劃分,設置六面體網格單元尺寸為5mm,劃分后的單元和節點數分別為65 700、309 048,如圖8所示。

圖8 鏟體網格劃分Fig.8 Mesh division of digging shovel
4.3 施加約束與載荷
根據挖掘鏟實際工作情況,對鏟體與兩側立桿及后端前刀軸連接處添加固定約束,并對鏟面施加垂直鏟面的力N1=5455.6N和平行于鏟面的力T1=3273.4N。
4.4 運行結果分析
運行仿真計算后,結果如圖9~圖11所示。由圖9可知:挖掘鏟工作時應力主要集中在鏟體與前刀軸連接處,故最大應力與最大應變都發生在鏟體與前刀軸連接處,最大應力值為3.07MPa,遠小于材料的屈服強度,滿足材料的強度要求。由圖10可知:最大應變為1.54×10-5,滿足材料使用要求。由圖11可知:鏟體工作時最大變形發生在鏟尖處,最大變形為1.26×10-5m,與鏟體尺寸相比該變形量很小,可以忽略不記。綜上所述,鏟體工作時的應力、應變與總變形量滿足使用要求,能夠完成作業任務,滿足設計要求。
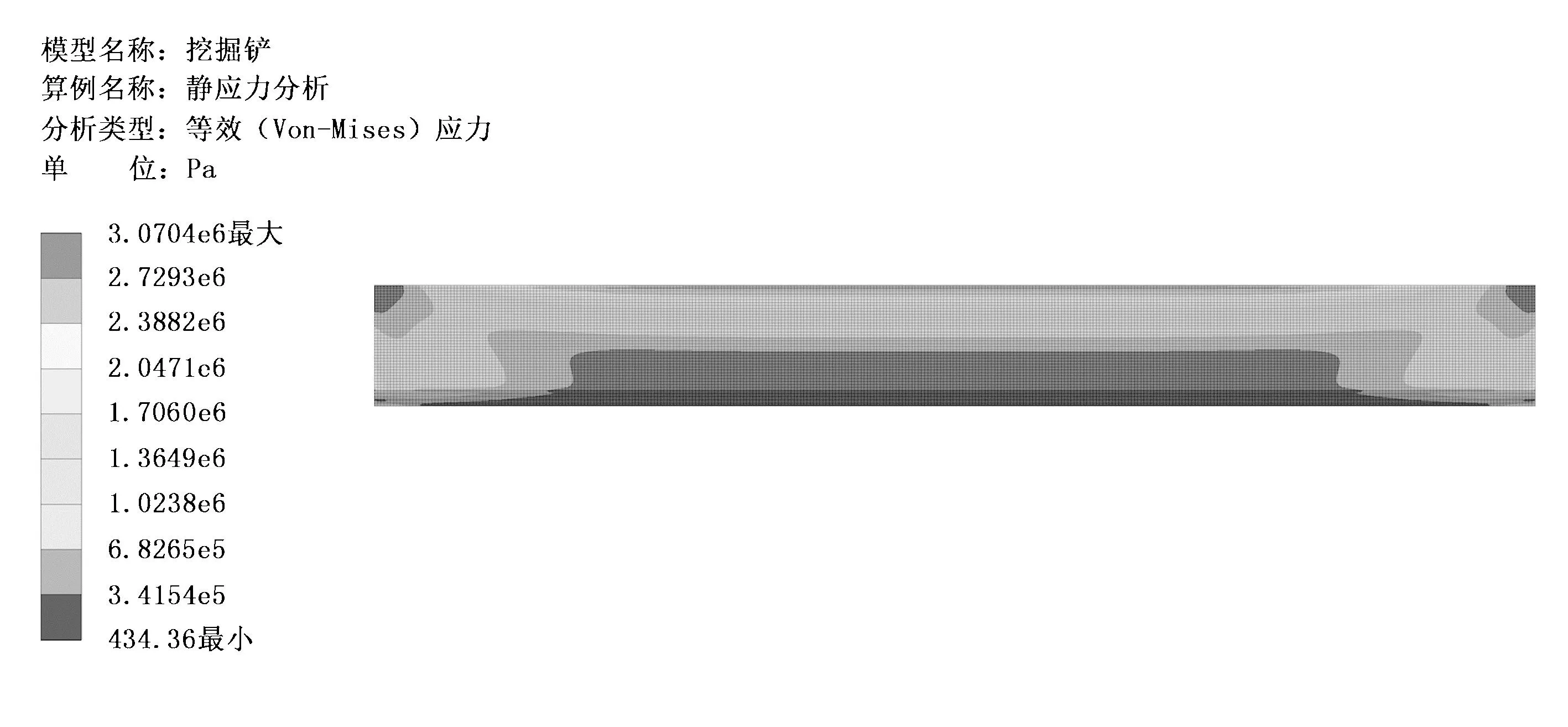
圖9 鏟體應力分布云圖Fig.9 Stress distribution graph of digging shovel
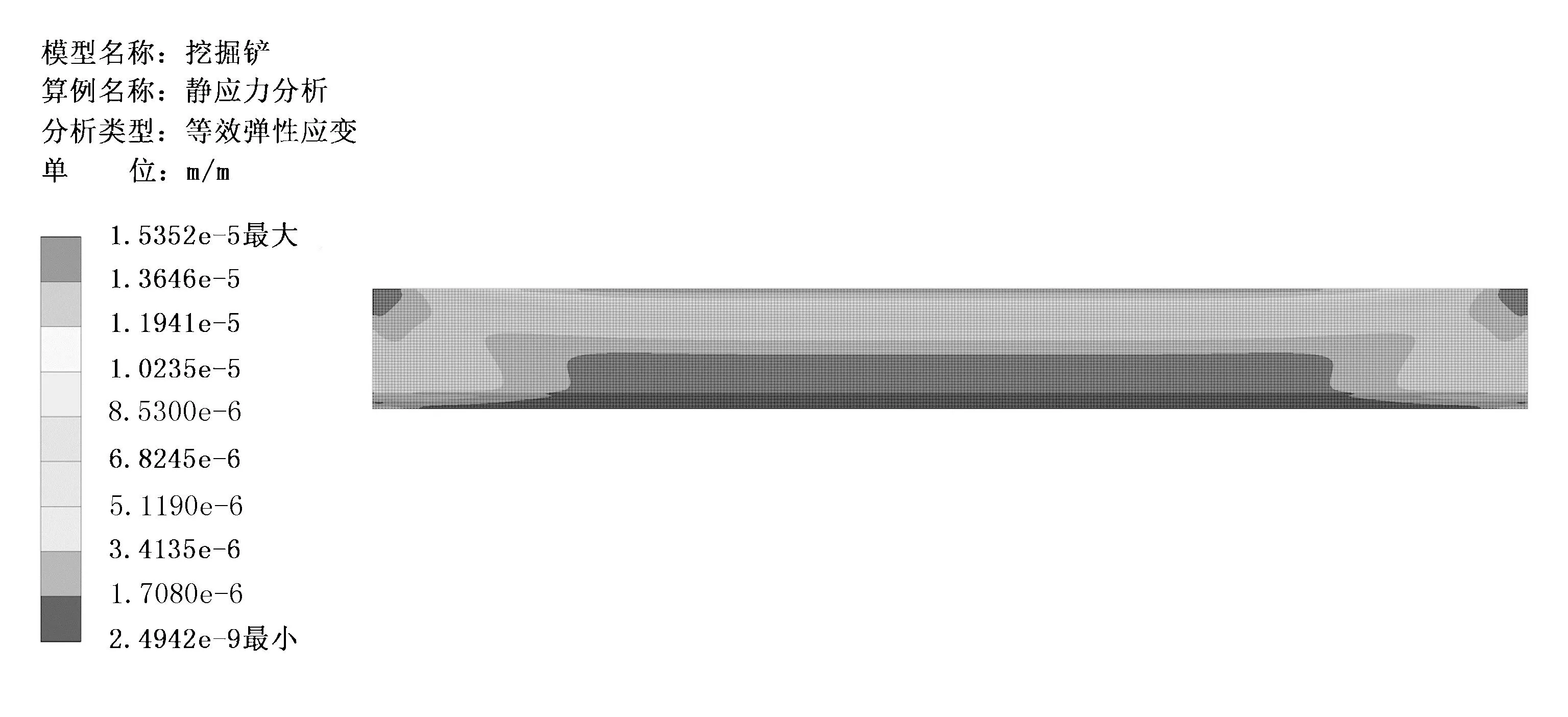
圖10 鏟體應變分布云圖Fig.10 Strain distribution graph of digging shovel
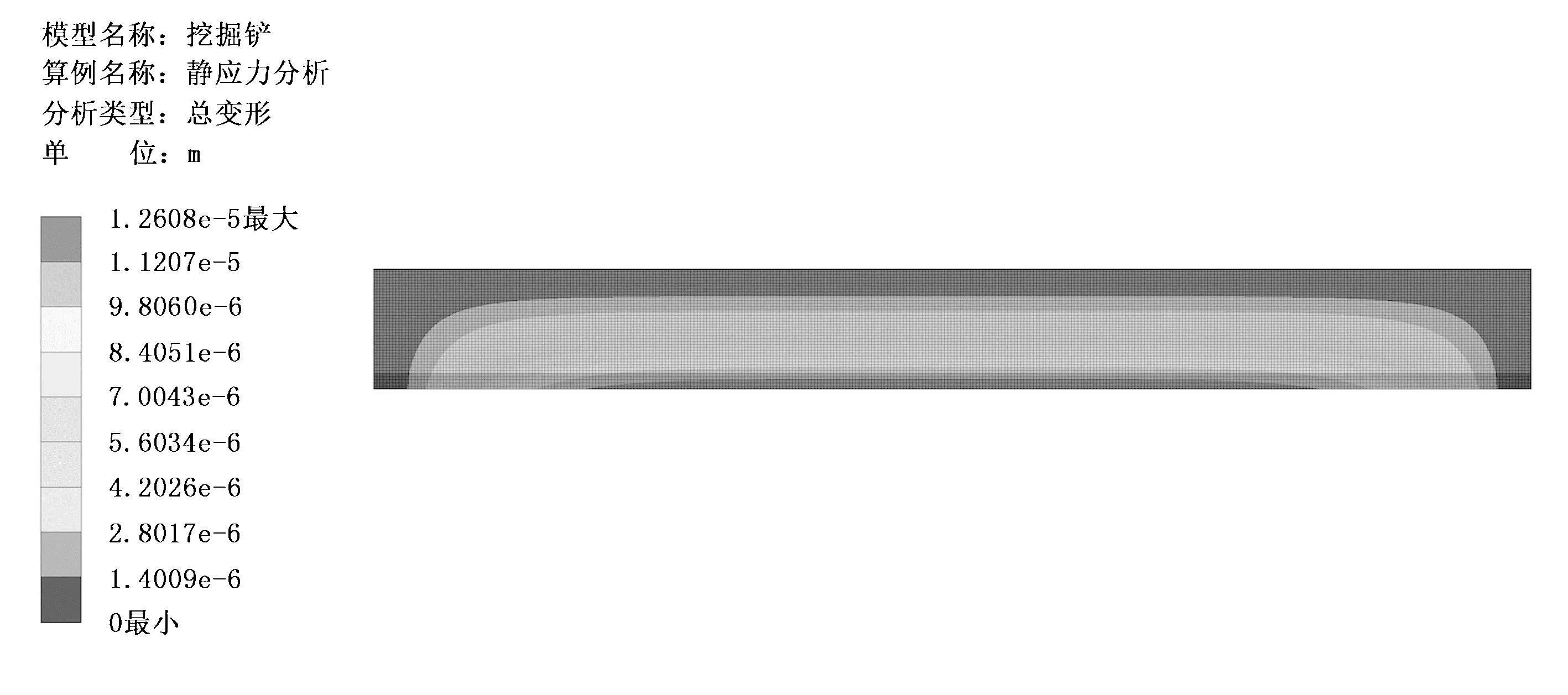
圖11 鏟體總變形云圖Fig.11 Distortion distribution graph ofdigging shovel
5 仿真分析
5.1 實驗模型
為分析該振動挖掘鏟工作情況下鏟尖的運動規律,利用ADAMS軟件對其進行仿真分析,在SolidWorks軟件中建立其三維模型(見圖12),保存成*.x_t格式導入ADAMS軟件中。
5.2 添加約束與驅動
在軟件中對模型進行材料添加、運動副設置、約束設置和驅動添加后進行運動學仿真分析,設置機器前進速度為1m/s,方向為x軸的反方向;偏心軸轉速為300r/min,方向為逆時針旋轉,在重力場中進行仿真,仿真持續時間2s,步數200,標記鏟尖一點為分析點,選取鏟尖運動到最低點時為位移的0點,由此得出振動鏟鏟尖的運動情況。
5.3 仿真結果分析
仿真得到的鏟尖一點在Y軸方向上位移、速度、加速度曲線如圖13~圖15所示。
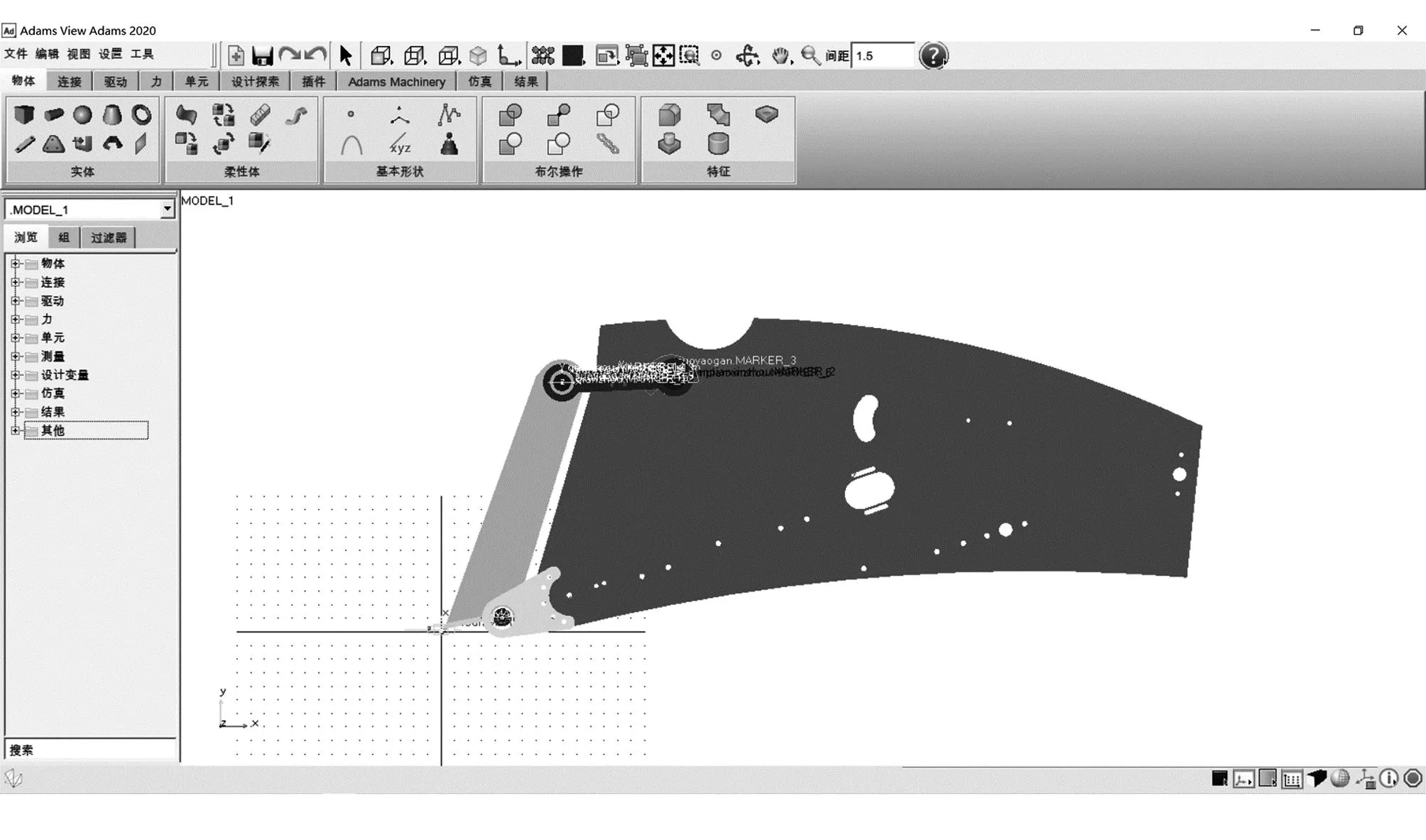
圖12 仿真模型Fig.12 Simulation model
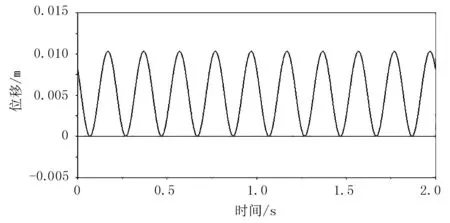
圖13 Y軸方向上時間—位移變化曲線Fig.13 Time-displacement change curve in y-axis direction
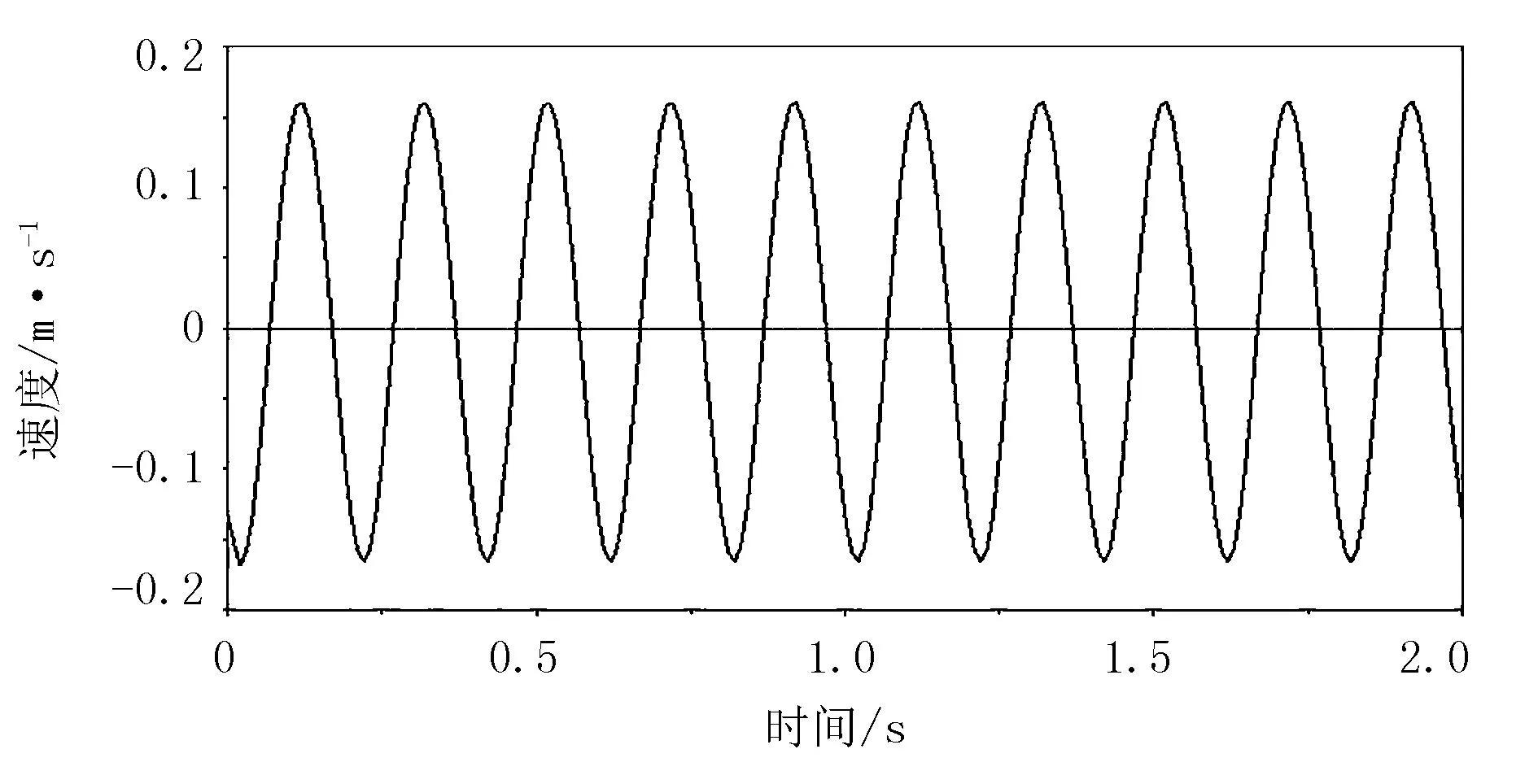
圖14 Y軸方向上時間—速度變化曲線Fig.14 Time-velocity change curve in y-axis direction
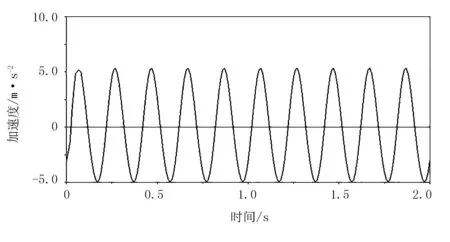
圖15 Y軸方向上時間—加速度變化曲線Fig.15 Time-acceleration change curve in y-axis direction
由圖13~圖15可知:振動鏟鏟尖的振動幅度約為10.4mm,滿足振幅不低于10mm的設計要求,挖掘鏟鏟尖速度最大值為0.16m/s,加速度最大值為5.06m/s2;鏟尖位移和速度在Y軸方向上隨時間變化平穩,沒有明顯波動;鏟尖工作時的運動規律符合簡諧運動,運動特性符合設計要求。
6 收獲機工作阻力試驗
通過理論計算得出中藥材收獲機為固定鏟時的工作阻力,實際振動鏟的工作阻力由試驗測得,將兩力大小進行對比,即可得到振動鏟的減阻效果。
查閱農業機械設計手冊,可得固定鏟式挖掘機械與拖拉機聯接裝置的牽引力公式為
Rc=SLρgtan(α+φ)+KS+KpG2
(15)
P=Gtan(α+φ)=SLρg(α+φ)
(16)
式中Rc—拖拉機聯接裝置牽引力(N);
K—犁溝土壤比阻(N/m2);
Kp—機器沿壟驅動的阻力系數;
G2—機器和鏟上土壤的重力(N)。
試驗土壤的含水率比較大,犁溝土壤比阻K=30 000N/m2,機器沿壟驅動的阻力系數Kp=0.17,機器質量1.7t。經計算,Rc=35 442.51N。即在此試驗環境下,拖拉機牽引搭載固定式挖掘鏟的同一型號的中藥材收獲機理論上需要35 442.51N的牽引力。
田間試驗于2021年11月19日在河北元氏縣蘇村閑置耕地進行,采用東方紅1504型拖拉機提供動力,如圖16所示。測得土壤平均含水率35.5%,平均土壤硬度92.4N,平均挖掘深度48.5mm。作業現場機組工作順暢,未有明顯的動力不足或壅土現象。

圖16 田間試驗Fig.16 Fieldtest
在拖拉機與收獲機三點懸掛裝置聯接處連接3個拉力傳感器,拖拉機牽引收獲機工作時記錄傳感器數據。通過求1000組數據的平均值來計算拖拉機對該振動鏟收獲機的牽引力大小,計算得到拉力F1的平均值為1097.6N,拉力F2的平均值為29527.4N,拉力F3的平均值為1078N,合力F合為31 703N。
試驗證明:振動鏟收獲機的工作阻力小于固定式挖掘鏟,振動式挖掘鏟減阻效果明顯,設計可行。
7 結論
1)針對中藥材收獲機入土阻力大、挖掘深度較淺、碎土能力差等問題,設計了一種深根莖中藥材振動挖掘裝置。采用曲柄搖桿機構驅動挖掘鏟進行振動挖掘,挖掘鏟鏟形采用條形鏟,工作幅寬B=1800mm,工作深度H=500mm,入土角α=20°,挖掘鏟總長L=283mm。根據整機尺寸確定各桿尺寸,按10mm的振動幅度計算得偏心軸的偏心距為20mm。
2)根據挖掘鏟工作受力對其進行有限元靜力學分析,得到該挖掘鏟的應力、應變及總變形云圖。結果顯示:最大應力發生在鏟體與前刀軸連接處,且最大應力遠小于材料的的屈服強度;最大變形發生在鏟尖處,形變較小,滿足材料的使用要求。
3)使用ADAMS軟件對該挖掘鏟進行運動學仿真,得到鏟尖在Y軸方向上的位移-時間、速度-時間、加速度-時間曲線。分析曲線可知:挖掘鏟工作時鏟尖的運動為簡諧運動,其運動特性符合設計要求。
4)通過試驗測得拖拉機對振動式挖掘鏟收獲機的牽引力,并將其與理論計算得到的固定式挖掘鏟收獲機所需牽引力進行對比,結果表明:振動式挖掘鏟減阻效果明顯。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00
