城市實(shí)景模型結(jié)構(gòu)化線面特征重構(gòu)方法
2024-01-09 07:18:50曲英杰
梅 熙, 王 義, 曲英杰, 鄧 非
(1.中鐵二院工程集團(tuán)有限責(zé)任公司,四川 成都 610031;2.武漢大學(xué) 測(cè)繪學(xué)院,湖北 武漢 430072)
城市實(shí)景的三維重建技術(shù)是當(dāng)前攝影測(cè)量領(lǐng)域的研究熱點(diǎn)之一。利用飛行器在城市場(chǎng)景中進(jìn)行多角度拍攝,通過影像立體匹配技術(shù)生成密集點(diǎn)云,再對(duì)密集點(diǎn)云進(jìn)行構(gòu)網(wǎng),最終構(gòu)建出實(shí)景三維網(wǎng)格模型[1]。目前開源的網(wǎng)格重建算法[2-3]從全局優(yōu)化的角度求解表面,存在過度平滑的問題,使得構(gòu)建的城市實(shí)景模型邊緣模糊、表面起伏。城市場(chǎng)景最為顯著的特點(diǎn)是存在大量平面和直線,重構(gòu)這些結(jié)構(gòu)化線面特征有利于實(shí)景模型的展示和測(cè)量。此外,準(zhǔn)確提取三維線面特征對(duì)配準(zhǔn)[4]、定位[5]、標(biāo)定[6]、結(jié)構(gòu)化重建[7]等研究均有重要意義。
研究者們嘗試在網(wǎng)格模型上重構(gòu)線面特征。在平面提取方面,主流的網(wǎng)格平面提取方法包括RANSAC(random sample consensus)[8]方法和區(qū)域生長(zhǎng)方法[9]。RANSAC方法將網(wǎng)格頂點(diǎn)作為點(diǎn)云處理,通過隨機(jī)采樣提取點(diǎn)云中的平面,這忽略了網(wǎng)格自身的拓?fù)潢P(guān)系,平面提取結(jié)果可能在網(wǎng)格表面上并不連續(xù)。區(qū)域生長(zhǎng)方法則在網(wǎng)格上選取種子點(diǎn)進(jìn)行擴(kuò)散,聚類具有相近法向和距離的三角面。結(jié)構(gòu)感知建筑物網(wǎng)格多邊形化(SBMP)方法[10]在此基礎(chǔ)上進(jìn)行改進(jìn),以平面度方法取代距離度量,聚類具有相同平面度的三角面。這類方法將網(wǎng)格的所有三角面都作為處理對(duì)象,即使是彎曲或者不規(guī)則的三角面也作為平面對(duì)待,導(dǎo)致錯(cuò)誤的平面提取結(jié)果。無序點(diǎn)云的最優(yōu)平面估計(jì)(GoCoPP)方法[11]從全局能量函數(shù)的角度提取點(diǎn)云中的平面,并以增加、刪除、修改等5種幾何操作最小化能量函數(shù)實(shí)現(xiàn)點(diǎn)云中平面基元的提取,但所有平面基元僅貼附在一起,并不能保證拓?fù)溥B接。
在網(wǎng)格線特征提取方面,文獻(xiàn)[12-13]中使用相似的思路,即首先提取三維平面,而后在每個(gè)平面中提取線。不同的是,文獻(xiàn)[12]中通過分割方法獲取平面中的邊界線,而文獻(xiàn)[13]中通過角點(diǎn)提取組成線。這些方法關(guān)注平面內(nèi)部線的重建,而對(duì)于平面與平面之間的線的重建研究較少。
綜上所述,現(xiàn)有的線面重構(gòu)方法多以頂點(diǎn)的位置和法向作為特征提取的依據(jù),而本研究中使用表達(dá)曲面彎曲程度的曲率信息引導(dǎo)結(jié)構(gòu)化線面特征重構(gòu)。首先,根據(jù)網(wǎng)格頂點(diǎn)的曲率將網(wǎng)格模型分割為平面、可展凹、可展凸以及不可展4類;然后,在平面分割結(jié)果中提取平面,再利用三角面的拓?fù)潢P(guān)系將平面以區(qū)域生長(zhǎng)的方式向可展凹和可展凸內(nèi)延伸,重構(gòu)直線特征,而不規(guī)則的不可展區(qū)域不作處理;最后,形成了一種帶有幾何特征的復(fù)合網(wǎng)格模型。
1 基于曲率的網(wǎng)格線面重構(gòu)方法
1.1 基于曲率分析的網(wǎng)格分割
在微分幾何中可展曲面被定義成高斯曲率為零的曲面[14],較為直觀的理解是沿著曲面母線對(duì)曲面進(jìn)行展開而不會(huì)受到阻礙。圖1 為曲面類型示意圖。可展曲面有一個(gè)重要的幾何特征,即母線方向存在一個(gè)為零的主曲率,根據(jù)另一個(gè)主曲率的正負(fù),可展曲面被分為可展凸和可展凹。不可展曲面是除了可展曲面以外的曲面,具有不規(guī)則的特點(diǎn)。如果2個(gè)主曲率都為零,該曲面就為平面;如果2個(gè)主曲率都不為零,該曲面就不可展。根據(jù)網(wǎng)格頂點(diǎn)的曲率特征,結(jié)合馬爾科夫隨機(jī)場(chǎng)(MRF)算法將網(wǎng)格模型表面分割為平面、可展凹、可展凸以及不可展。
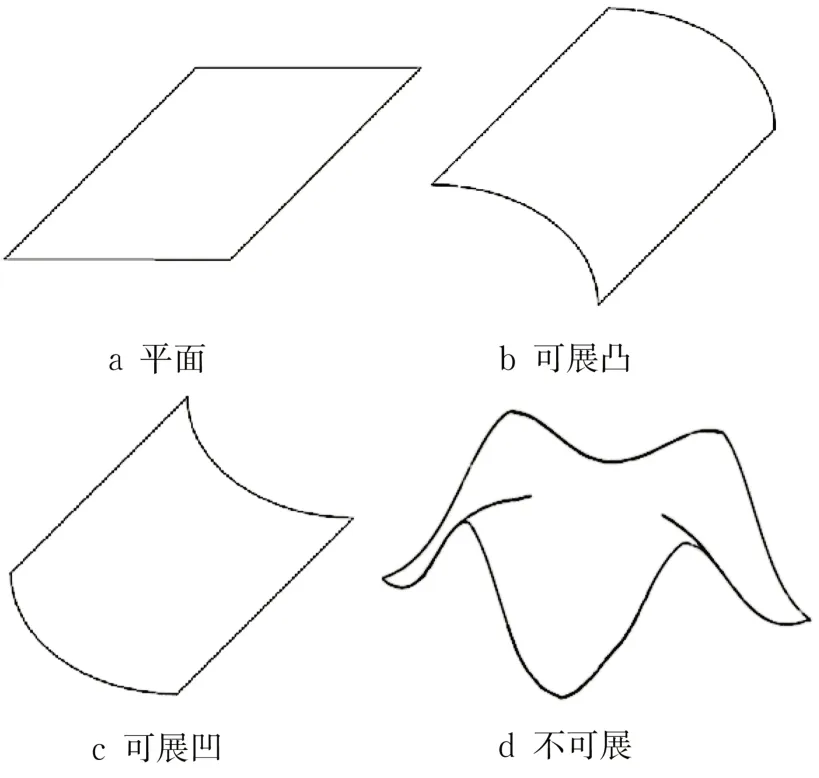
圖1 曲面類型Fig.1 Surface types
具體地,令kmax、kmin分別為最大曲率和最小曲率。平面的主曲率特征為kmax=kmin=0;可展凸的主曲率特征為kmin=0 <kmax;可展凹的主曲率特征為kmin<kmax=0;不可展的主曲率特征為kmin≠0 且kmax≠0。將以上4種特征標(biāo)記為L(zhǎng)={1,2,3,4},l={l1,l2,…,lN}表示N個(gè)格網(wǎng)頂點(diǎn)所屬類型的集合。為描述網(wǎng)格頂點(diǎn)的所屬類別,將曲率k進(jìn)行歸一化,即Gσ(k)=exp(-k2/2σ2),其中σ為網(wǎng)格曲率標(biāo)準(zhǔn)方差,則每個(gè)頂點(diǎn)屬于各個(gè)類型的概率為
式中:P(li|(kmin,kmax))表示每個(gè)頂點(diǎn)屬于每個(gè)類型的概率。對(duì)網(wǎng)格M的每個(gè)頂點(diǎn)求其分類器結(jié)果,取最大值作為初始分類結(jié)果,該結(jié)果僅考慮了獨(dú)立頂點(diǎn)的曲率信息,類別結(jié)果存在噪聲(如圖2 第二行所示)。因此,構(gòu)建MRF 模型,將曲率分析結(jié)果作為MRF模型的數(shù)據(jù)項(xiàng),并根據(jù)頂點(diǎn)之間的鄰接拓?fù)潢P(guān)系構(gòu)建平滑項(xiàng)。優(yōu)化全局能量函數(shù)U(l)。N個(gè)網(wǎng)格頂點(diǎn)l的能量總和為U(l),即每個(gè)頂點(diǎn)數(shù)據(jù)項(xiàng)Di(li)和平滑項(xiàng)Vij(li,lj)的和,表示為
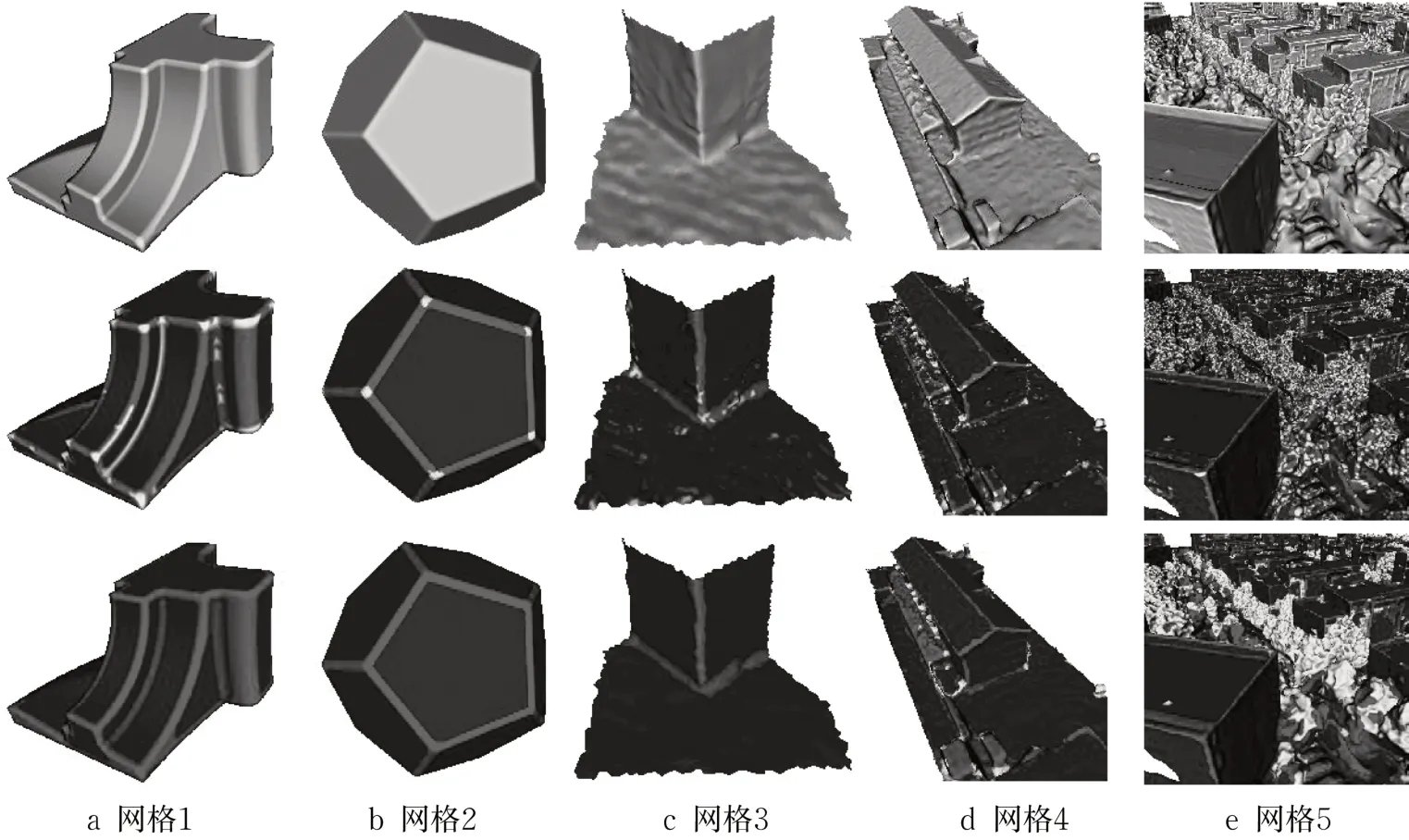
圖2 基于曲率分析的網(wǎng)格分割結(jié)果Fig.2 Mesh segmentation results based on curvature analysis
式中:V為網(wǎng)格頂點(diǎn)集合;E為網(wǎng)格邊集合。Di(li)表示網(wǎng)格頂點(diǎn)作為不同類型所產(chǎn)生的代價(jià),計(jì)算式如下所示:
Vij(li,lj)表示鄰接頂點(diǎn)i和頂點(diǎn)j的類別相同與不同時(shí)的代價(jià),Vij(li,lj)計(jì)算式如下所示:
Vij起到使相鄰頂點(diǎn)標(biāo)簽一致的作用,即在馬爾科夫假設(shè)下相鄰頂點(diǎn)應(yīng)有相同的標(biāo)簽。
為使能量函數(shù)U(l)最小,采用α-expansion[15]算法求解全局最優(yōu)解。求解結(jié)果如圖2 所示,第一行為原始網(wǎng)格,第二行為根據(jù)曲率分析計(jì)算的初始分割結(jié)果,第三行為MRF算法優(yōu)化后的分割結(jié)果。經(jīng)MRF算法優(yōu)化后,類別結(jié)果趨于相同。對(duì)分割的平面塊內(nèi)的頂點(diǎn)使用RANSAC算法進(jìn)行平面擬合,可得到初始的平面結(jié)果。
1.2 基于區(qū)域生長(zhǎng)的平面擴(kuò)展
城市場(chǎng)景中存在大量的平面和線特征,但由于網(wǎng)格重建方法存在過度平滑問題,網(wǎng)格模型總是在邊界處形成彎曲的弧形,該弧形具有凸或凹的特點(diǎn),被本方法識(shí)別為可展凹或可展凸(見圖2)。因此,在網(wǎng)格分割的基礎(chǔ)上,將已經(jīng)分割出的平面通過區(qū)域生長(zhǎng)的方式[6]向可展的凸或凹進(jìn)行延伸,重構(gòu)出線特征(見圖3)。具體地,每個(gè)平面的邊緣頂點(diǎn)向鄰接的可展凹或可展凸內(nèi)的一鄰域頂點(diǎn)延伸,若2 個(gè)頂點(diǎn)法向之間的夾角小于45°且頂點(diǎn)到平面的距離小于網(wǎng)格模型所有邊的平均邊長(zhǎng),則延伸成功,該點(diǎn)成為平面點(diǎn),繼續(xù)向一鄰域延伸,反之則停止延伸。如果在延伸過程中產(chǎn)生拓?fù)溧徑樱ㄒ妶D3),即2個(gè)鄰域頂點(diǎn)所屬的平面不同,就將2 個(gè)頂點(diǎn)中距離交線最近的點(diǎn)投影到交線上。目前,平面與平面之間線的重建研究尚少,本研究通過曲率分割方法預(yù)估交線的范圍,并通過平面延伸重構(gòu)交線,而對(duì)于網(wǎng)格模型中不規(guī)則的不可展區(qū)域,不進(jìn)行處理。
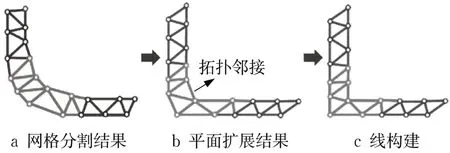
圖3 線構(gòu)建過程Fig.3 Line construction process
1.3 基于線面特征的網(wǎng)格簡(jiǎn)化
網(wǎng)格簡(jiǎn)化算法以降低網(wǎng)格模型的精度換取三角面數(shù)量的減少,而本研究只針對(duì)重構(gòu)的平面區(qū)域進(jìn)行簡(jiǎn)化,網(wǎng)格形狀不會(huì)因簡(jiǎn)化而改變。分別在每個(gè)平面提取結(jié)果所覆蓋的三角面中實(shí)施經(jīng)典的Quadric 簡(jiǎn)化算法[16]。Quadric 簡(jiǎn)化算法計(jì)算網(wǎng)格中每條邊的二次誤差度量并排序,依次折疊二次誤差度量最大的邊,使三角面數(shù)量減少,直到三角面數(shù)目減少到設(shè)置的閾值時(shí)停止。實(shí)際中,每個(gè)平面停止簡(jiǎn)化的閾值設(shè)置為原有三角面數(shù)量的5%。
2 實(shí)驗(yàn)分析與驗(yàn)證
在多視立體技術(shù)生成[17]的城市實(shí)景模型上進(jìn)行測(cè)試。定性實(shí)驗(yàn)評(píng)估本方法的視覺結(jié)果,定量實(shí)驗(yàn)評(píng)估本方法提取平面和直線特征的準(zhǔn)確性。
2.1 定性實(shí)驗(yàn)
定性實(shí)驗(yàn)數(shù)據(jù)采用2組無人機(jī)影像構(gòu)建的實(shí)景數(shù)據(jù)。實(shí)景數(shù)據(jù)1采集于武漢市某地,包括114張像素分辨率為5 456×3 632 的影像,無人機(jī)飛行高度約為100 m,地面分辨率約為3 cm。實(shí)景數(shù)據(jù)2采集于奉化市某地,包含224 張像素分辨率為6 000×4 000的影像,無人機(jī)飛行高度約為150 m,地面分辨率約為4 cm。2 組數(shù)據(jù)包含了寫字樓、住房、廠房、樹、車等典型地物。
2.1.1 平面提取結(jié)果
將初始網(wǎng)格模型重構(gòu)為包含幾何特征的復(fù)合網(wǎng)格模型,其中平面采用隨機(jī)彩色渲染,非平面以灰色渲染,如圖4 所示。實(shí)景數(shù)據(jù)1 包含了大量的樹木,復(fù)合模型很好地適應(yīng)了該復(fù)雜場(chǎng)景。樹地物在初始網(wǎng)格上表現(xiàn)得極為彎曲,基于曲率網(wǎng)格分割方法將其分割為不可展面(見圖2e),不參與平面提取處理,從而保證了平面提取的準(zhǔn)確性。實(shí)景數(shù)據(jù)2的場(chǎng)景相對(duì)較為簡(jiǎn)單,提取的彩色平面幾乎將場(chǎng)景全部覆蓋。

圖4 本算法平面提取結(jié)果Fig.4 Plane extraction results of the algorithm in this paper
2.1.2 結(jié)構(gòu)化線面特征重構(gòu)結(jié)果
對(duì)比了初始網(wǎng)格與線面特征重構(gòu)網(wǎng)格的可視化結(jié)果(見圖5和圖6)。初始網(wǎng)格的屋頂、立面和地面存在起伏(見圖5),而本方法結(jié)果更為平整,平面上沒有噪聲。此外,本方法生成的網(wǎng)格模型在平面相交部分較初始網(wǎng)格更為“銳化”,能夠清楚地確定交線的位置,即使是在屋頂邊緣矮墻結(jié)構(gòu)中(見圖5)。最后,本網(wǎng)格相較于初始網(wǎng)格使用數(shù)量更少,采用更大的三角面構(gòu)建平面(見圖6)。
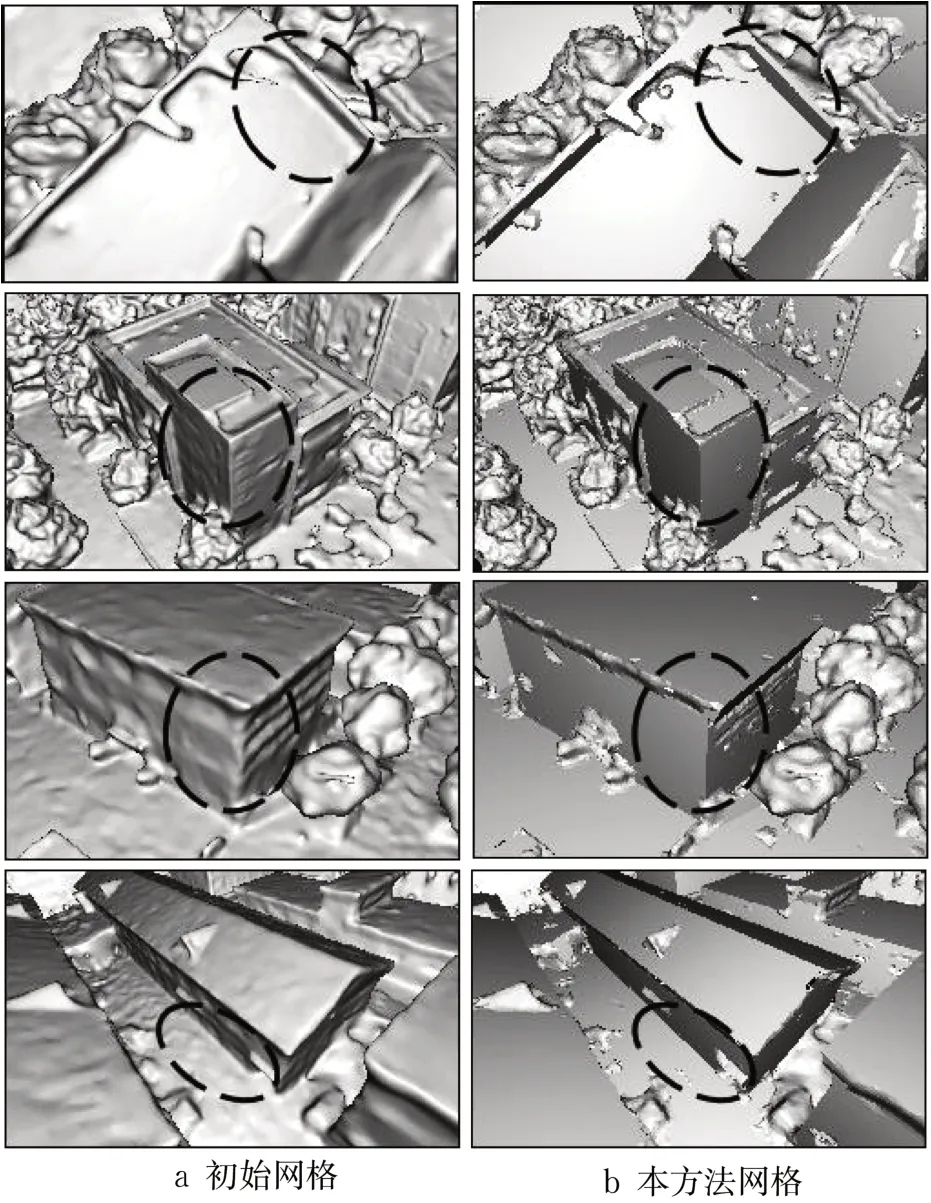
圖5 結(jié)構(gòu)化線面特征重構(gòu)結(jié)果Fig.5 Reconstructed results of the structured line and plane features

圖6 網(wǎng)格密度對(duì)比Fig.6 Comparison of mesh density
線面特征數(shù)量與簡(jiǎn)化率的量化統(tǒng)計(jì)如表1 所示。簡(jiǎn)化率的計(jì)算方法為1-ndec/nori,其中ndec為簡(jiǎn)化后的三角面數(shù)量,nori為原始三角面數(shù)量。由于實(shí)景數(shù)據(jù)1 存在更多沒有被簡(jiǎn)化的樹結(jié)構(gòu),因此簡(jiǎn)化率低于實(shí)景數(shù)據(jù)2。綜上所述,本網(wǎng)格使用更少的頂點(diǎn)和三角面得到了更為平整且邊結(jié)構(gòu)“銳化”的網(wǎng)格模型。

表1 線面特征與簡(jiǎn)化率的量化統(tǒng)計(jì)Tab.1 Quantitative statistics of the line and plane feature and compression rates
2.2 定量實(shí)驗(yàn)
2.2.1 數(shù)據(jù)與評(píng)價(jià)指標(biāo)
選取城市攝影測(cè)量數(shù)據(jù)集Ai3dr[18]進(jìn)行定量實(shí)驗(yàn),該數(shù)據(jù)集包括了美國(guó)Dublin市的2個(gè)區(qū)域Area1和Area2。每個(gè)場(chǎng)景有下視和傾斜視角的無人機(jī)影像以及機(jī)載雷達(dá)點(diǎn)云。下視影像的圖像分辨率為9 000×6 732,地面分辨率為3.4 cm。激光雷達(dá)點(diǎn)云的密度為335 m-2。以機(jī)載雷達(dá)數(shù)據(jù)為參考評(píng)價(jià)網(wǎng)格。以所有平面和線上點(diǎn)到最近雷達(dá)點(diǎn)的距離的均值(μM2L)和均方根誤差(σR2L)評(píng)價(jià)精度。此外,所提取的線面特征應(yīng)盡量貼近于原始網(wǎng)格,因此以所有平面和線上點(diǎn)到初始網(wǎng)格表面距離的均值(μM2M)和方差(σR2M)評(píng)價(jià)保真度。
2.2.2 平面特征評(píng)價(jià)
針對(duì)平面提取結(jié)果,對(duì)比了經(jīng)典的RANSAC方法[8]、Region Growing 方法[9]以及SBMP 方法[10](這里對(duì)比方法中平面提取部分)和GoCoPP方法[11](見圖7)。RANSAC 方法沒有考慮網(wǎng)格頂點(diǎn)的鄰接關(guān)系,出現(xiàn)跨區(qū)域的平面提取結(jié)果,導(dǎo)致網(wǎng)格嚴(yán)重失真。GoCoPP 方法構(gòu)建的結(jié)果最為簡(jiǎn)單,但忽略了最多的細(xì)節(jié),提取的平面之間存在空隙,丟棄了原始網(wǎng)格的拓?fù)湫畔ⅰegion Growing方法和SBMP方法具有相似的結(jié)果,都將網(wǎng)格模型的所有部分表達(dá)為平面,這使得小的不規(guī)則的屋頂結(jié)構(gòu)和樹結(jié)構(gòu)出現(xiàn)錯(cuò)誤的平面提取結(jié)果。本方法基于曲率信息預(yù)先設(shè)置平面特征的潛在范圍,在窗戶部分獲得了更精細(xì)的平面分割結(jié)果(見圖7 第一行和第三行)。此外,原始網(wǎng)格中較為不規(guī)則的部分被平面提取跳過(見圖7 第一行中的建筑物屋頂、圖7 第三行中的樹木以及圖7第四行中的車),而其余方法將網(wǎng)格所有部分都變成平面,產(chǎn)生失真的結(jié)果。表2 為所有方法提取的平面精度。RANSAC 方法和GoCoPP 方法嚴(yán)重失真,導(dǎo)致誤差較大,而Region Growing方法和SBMP 方法由于過度的平面擬合導(dǎo)致精度不高。本方法有更為精細(xì)的平面提取結(jié)果,同時(shí)對(duì)于樹木等不規(guī)則網(wǎng)格部分沒有提取平面,因此具有最高的保真度和精度。

表2 平面提取精度Tab.2 Accuracy of the extracted plane
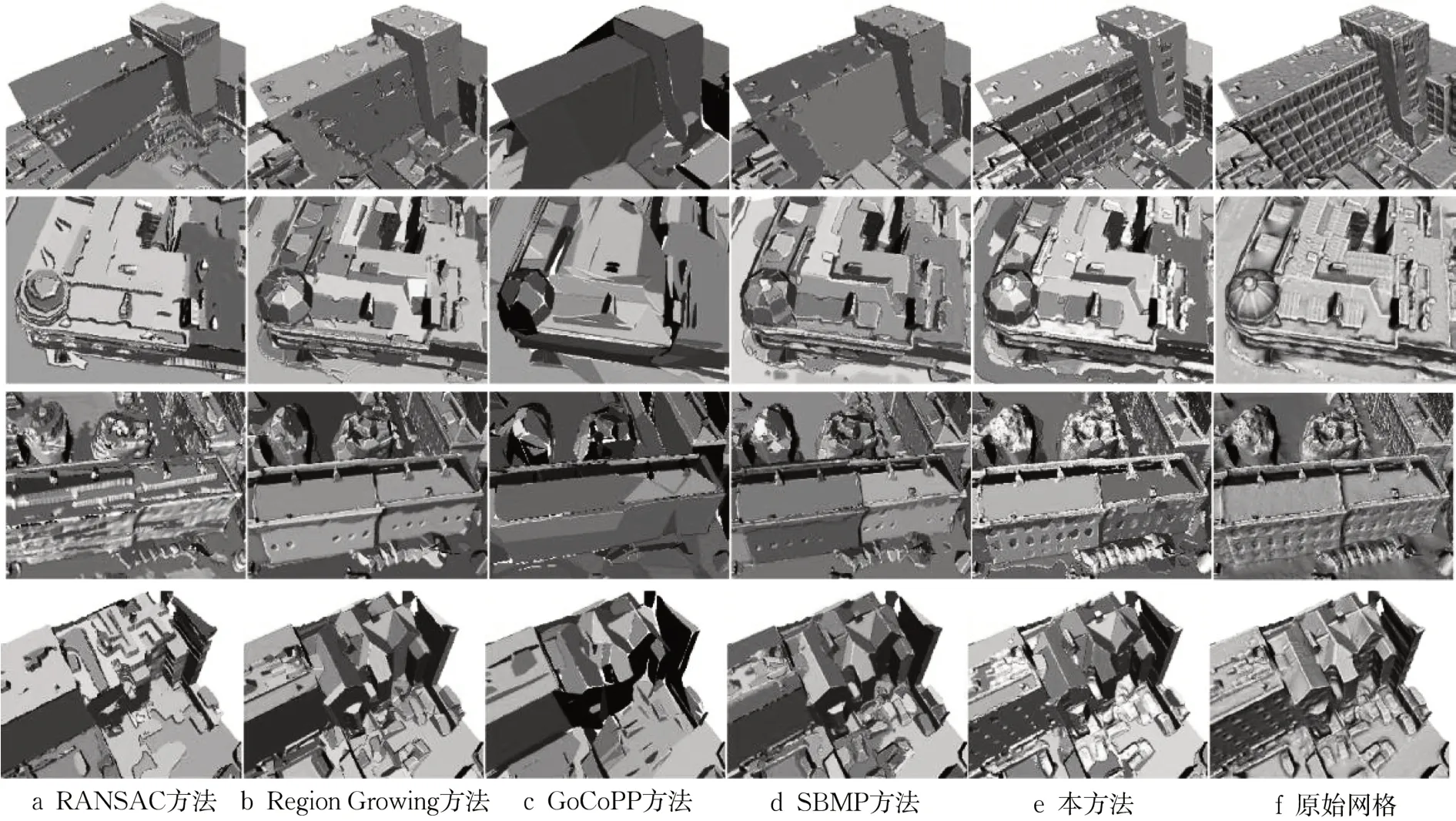
圖7 平面提取結(jié)果Fig.7 Results of plane extraction
2.2.3 線特征評(píng)價(jià)
針對(duì)線特征提取結(jié)果,對(duì)比了快速檢測(cè)三維線段(LFP)方法[13]。LFP方法和本方法都基于空間信息直接提取三維線特征。圖8第一行展示了整個(gè)測(cè)區(qū)的線提取結(jié)果,第二行和第三行展示了線特征與原始網(wǎng)格模型的疊加結(jié)果。本方法的線由面面相交獲得,能夠有效重構(gòu)出建筑的結(jié)構(gòu)線輪廓,相比LFP方法,本方法線特征與網(wǎng)格模型更加貼合,具有更高的精度(見表3)。

表3 線提取精度Tab.3 Accuracy of the extracted line

圖8 線提取結(jié)果Fig.8 Results of line extraction
3 結(jié)語
重構(gòu)城市實(shí)景模型中的結(jié)構(gòu)化線面特征,有助于實(shí)現(xiàn)實(shí)景模型的語義化與結(jié)構(gòu)化。通過曲率將網(wǎng)格分割為平面、可展凸、可展凹和不可展曲面,重構(gòu)線面特征,改善網(wǎng)格模型邊角模糊問題,同時(shí)對(duì)平面結(jié)構(gòu)進(jìn)行簡(jiǎn)化,大量減少網(wǎng)格三角形數(shù)量。重構(gòu)的平面特征幾乎覆蓋建筑物,未來將建立起平面之間的拓?fù)潢P(guān)系,將建筑物分離為單體,完成結(jié)構(gòu)化重建。
作者貢獻(xiàn)聲明:
梅 熙:研究選題,提供研究思路和技術(shù)指導(dǎo),論文審定。
王 義:實(shí)驗(yàn)數(shù)據(jù)獲取,論文撰寫與審定。
曲英杰:數(shù)據(jù)處理,方法實(shí)現(xiàn),論文整體構(gòu)思與撰寫。
鄧 非:?jiǎn)栴}探討,論文審定。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
