目標與態勢三維可視化系統設計與實現
2024-01-10 04:05:56劉永海肖雅娟
網絡安全與數據管理 2023年12期
楊 垚,劉永海,肖雅娟,卞 泊
(解放軍92020部隊,山東 青島 266000)
0 引言
態勢是指戰場空間中兵力分布和戰場環境的當前狀態及發展變化趨勢的總稱[1]。設計并實現一個實用高效的態勢可視化系統十分必要。目前,對態勢可視化的研究主要集中在態勢實時監控[2-3]和態勢回放[4-5]兩方面。李帥等[6]實現了基于 Qt 的目標態勢的實時顯示系統,伍宗卿等[7-8]實現了基于Web的實時態勢顯示系統,但上述三者僅側重于態勢實時監控,無法提供態勢回溯功能。吳蕾等[9-12]實現了模擬演習中的戰場態勢回放系統,但態勢數據都存于本地磁盤,無法滿足海量態勢回放需求;張明杰等[13]實現了一個包含態勢實時顯示和態勢回放兩個功能的系統,但并未有效利用多源態勢數據且態勢展示方式單調;孟凡躍等[14]提出了態勢回放多形式顯示方法,但態勢顯示效率不高。
在實際應用中,隨著態勢持續時間和目標數量的持續增加,會產生海量的態勢數據,需要使用大數據存儲技術對其進行存儲[15-16];同時,海量態勢數據中包含了多源異構數據,需要對這些數據進行挖掘和利用來提升態勢展示效果[17];并且態勢回放過程中,通常需要查看目標的基本信息和能力覆蓋范圍,而現有態勢展示系統無法滿足上述三個需求。
針對以上問題,本文設計并實現了一個目標與態勢三維可視化系統,包含實時態勢監控、歷史態勢回放和目標三維可視化等功能。該系統實時接收和處理海量態勢數據,并對多源異構態勢數據進行數據融合,然后將其存儲至列數據庫中,最后基于GIS技術將目標與態勢進行三維可視化展示。
1 關鍵技術研究
1.1 數據處理
隨著物聯網技術的飛速發展,可獲取的態勢信息呈爆炸式增長,如何對海量多源異構態勢數據進行有效處理和融合是態勢可視化的關鍵技術之一。本節從數據清洗、數據插值、數據融合等方面對原始態勢信息進行處理。
1.1.1 數據清洗
本文采取一系列數據清洗規則對從傳感器設備、雷達設備和船舶自動識別系統(Automatic Identification System,AIS)獲取的數據進行處理,主要是過濾重復和異常數據。以AIS數據為例,處理策略如下:
(1)刪除唯一標識碼、時間戳、經度、緯度為空值的數據。
(2)刪除唯一標識相同且時間戳一樣的重復數據。
(3)刪除經度、緯度、航速和航向超出表1范圍的異常數據。
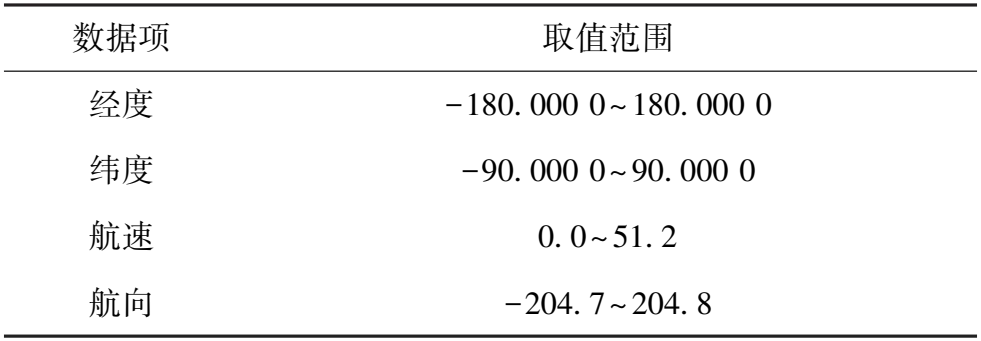
表1 AIS數據中部分數據項的有效取值范圍
1.1.2 數據插值
數據清洗會過濾掉一些重復和異常的航跡數據,并且傳感器設備上報數據周期并不規律,導致實際得到航跡數據的時間間隔并不固定,可能會出現很長時間間隔中沒有航跡數據,為了提升態勢顯示效果,需要采用數據插值方法進行處理。另外,在某時刻發生突發事件,需要在航跡點上進行標注,但在這一時刻并不一定存在真實的航跡點,因此也需要通過插值來添加航跡點。
關于航跡點的插值方法有很多種,例如:線性插值、三次樣條插值。鑒于航跡數據實時性要求高且體量大,本文在兼顧效率和性能等因素的考慮下,采用結合航向和航速的插值方法[18]。假設在航跡點A(t1,x1,y1,v1,θ1)和B(t2,x2,y2,v2,θ2)之間插入一個新點,根據A點和B點的信息,可以分別計算出待插入點的一個預測值,如式(1)和式(2)所示:
(1)
(2)
其中,v和θ分別為A、B兩點的航速和航向,ti為待插入點時間戳。然后對(xi1,yi1)和(xi2,yi2)進行加權平均得到插入點坐標,權重通過ti、t1和t2之間的時間差進行計算。即:
(3)
其中,W1和W2為A、B兩點的權重。最終得到的預測值為:
(4)
1.1.3 數據融合
如圖1所示,雷達和AIS數據既有冗余又可互補,因此將其進行融合能夠提高態勢數據可靠性和展示維度。根據雷達和AIS數據各自特點,對二者進行數據融合一般可分為四個步驟:坐標轉換、時間同步、航跡關聯和航跡融合。
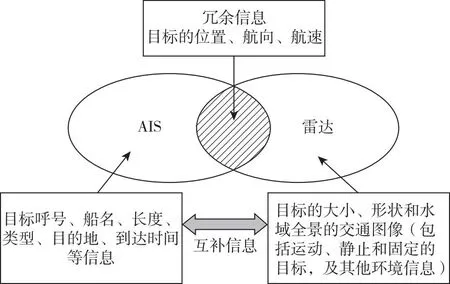
圖1 雷達和AIS數據冗余互補圖
(1)坐標轉換。考慮到轉換的效率和精度,本文將雷達和AIS獲取目標的航跡信息轉換到直角坐標系中。雷達獲取的目標位置是以雷達為原點的距離和方位角,可以采用極坐標進行轉換,具體轉換方法如下:
(5)
式中,(x,y)為雷達中心的經緯度坐標,R,θ分別為雷達測得的目標距離和方位角。而AIS數據是以經緯度來表示目標的位置信息,采用的是將 WGS-84 坐標系根據墨卡托投影方法將其轉換到直角坐標系。
(2)時間同步。雷達數據的更新周期為2~4 s,而AIS數據更新時間不固定,沒有周期性,因此,以雷達數據的時間為基準,對AIS數據進行插值操作來保證二者時間同步。插值算法采用1.1.2節中提出的結合航向和航速的插值方法。
(3)航跡關聯。在數據融合之前,需要判斷雷達和AIS獲取數據是否為同一個目標,本文綜合考慮距離、航速和航向等因素,采用多因素綜合關聯規則[19]。假設在某段時間內獲得N個雷達和N個AIS航跡點,(pi,vi,θi)表示第i個點的位置、航速和航向,(α1,α2,α3)表示距離、航速和航向3個因素的權重系數,通過式(6)~(8)分別計算上述3個因素的關聯程度:
(6)
(7)
(8)
M=α1P+α2V+α3θ
(9)
式中,M表示最終加權后的關聯度,若M小于預設的閾值,則認為雷達和AIS獲取的這兩段航跡是關聯的。
(4)航跡融合。面對海量的雷達和AIS數據,為提高數據處理速度,應選擇簡單高效、易于實現的航跡融合算法。基于以上考慮,本文使用加權平均融合算法[20]對雷達和AIS數據進行融合,具體公式如下:
(10)
式中,X表示融合后的數據,Xr,Xa分別表示雷達和AIS中需要融合的位置、航速和航向數據,Wr,Wa分別表示雷達和AIS的融合權重。權重大小與設備的觀測誤差σ2有關,觀測誤差越小,權重越大。根據最小均方誤差原則,可得到Wr,Wa的最優解為:
(11)
1.2 數據查詢
面對海量歷史態勢數據,如果一次性全部獲取,不僅獲取時間長而且容易造成內存溢出問題。本文基于分布式列數據庫設計了一種快速獲取態勢回放所需數據方法,具體如下:
(1)查詢滿足條件目標的最舊態勢記錄和最新態勢記錄,得到回放時間軸;
(2)采用按時間間隔分批獲取數據方式,查詢開始時間和時間間隔之間的目標態勢記錄;
(3)前端根據獲取的態勢記錄顯示態勢信息;
(4)若當前回放時間離上次獲取數據時間小于時間間隔,將開始時間設置為開始時間與時間間隔之和,重復執行步驟(2),直至開始時間大于回放結束時間。
如果用戶在態勢回放過程中設置倍速或快進,將重新設置開始時間和時間間隔,保證正常獲取回放數據。
1.3 數據可視化
1.3.1 目標可視化
該系統基于Web和GIS服務對目標的圖標、基本信息、能力等進行可視化展示。目標通常可分為靜態目標(如港口、機場、雷達站等)和動態目標(如汽車、艦船、飛機等)。靜態目標由于數量較多,考慮到顯示效率,一般使用小圖標表示;而動態目標需要在三維地圖上進行移動,為提升空間顯示效果,可使用三維小模型表示,但如果動態目標數量太多,考慮系統顯示效率,也應使用小圖標表示。具體圖標示例如圖2所示。目標的基本信息一般包括目標的圖片、文本描述、相關文本資料和音視頻等,這些信息通過前端頁面彈框的形式來展示。目標能力是指搭載某些裝備而具有的偵察預警、防空反導等能力,為直觀立體顯示能力覆蓋范圍,本文通過增加能力圖層方式顯示三維能力包絡。
1.3.2 態勢實時顯示
無論是日常態勢監控還是大規模演練都需要實時接收大量態勢數據,設計快速、穩定的態勢數據獲取方法是態勢實時顯示的關鍵。現有態勢實時顯示系統首次獲取態勢數據效率都不高,本系統在內存數據庫中存儲最新的態勢信息,能夠快速獲取最新態勢并顯示。同時,利用WebSocket技術與后端建立長連接,當后臺接收到新的態勢數據時,實時推送給前端展示,保證了態勢顯示的實時性和穩定性。
1.3.3 態勢回放顯示
態勢回放是將目標的歷史航跡、行為、事件等多維數據進行回放展示。系統獲取歷史態勢數據時采用1.2節中提出的分批獲取數據方式,使得目標態勢可以快速上顯,縮短系統等待時間。在回放過程中,系統支持設置回放倍速和快進操作,也支持點擊目標模型圖標查看目標基礎信息和展示目標三維能力包絡,并且目標三維能力包絡可跟隨航跡變化而動態移動。同時,當回放至異常告警或突發事件時,系統會自動彈出信息框,提醒用戶進行重點回看。
在此基礎上,系統設計了3種態勢回放方式,即全景回放、概略回放和事件回放。全景回放是將某一時間段內的全部目標的所有態勢信息按照時間順序逐一回放,有利于清晰完整地呈現全目標態勢。概略回放是從關系數據庫中獲取態勢航跡中的關鍵點來呈現目標的遷徙路徑。事件回放是將事件發生前后的時間段內與事件相關的目標進行回放顯示,方便用戶進行事件分析。
2 系統結構設計
系統整體結構包括感知設備層、數據采集處理層、多級數據存儲層、支撐服務層、綜合展現層。系統結構設計圖如圖3所示。
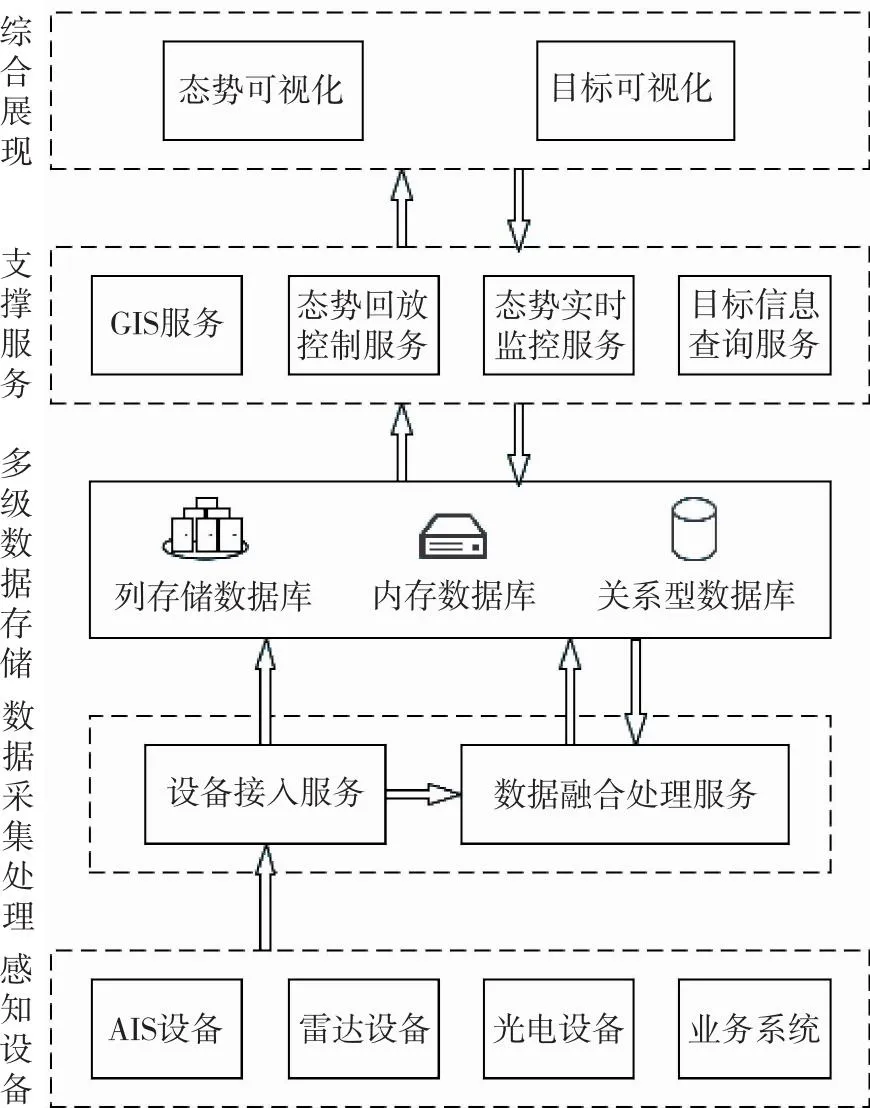
圖3 系統結構設計圖
(1)感知設備層。感知設備層包含了產生態勢數據的多類傳感設備和提供目標基礎數據的業務系統。該層為目標與態勢可視化提供原始數據,并通過各類傳輸協議發送至設備接入服務。
(2)數據采集處理層。設備接入服務支持多協議、多類型的數據實時采集與處理,采用多線程編程框架來提升服務并發能力。同時,該服務兼容HTTP、TCP和UDP等數據傳輸方式以支持各類傳感器設備和業務系統的數據接入。對于設備數據解析協議多樣的問題,該服務采用協議適配、協議解析技術從原始數據包中提取實際數據。
數據融合處理服務是對設備接入服務中解析出的原始數據進行清洗過濾、插值、關聯、融合等操作。數據清洗是將原始數據中的重復值和異常值進行過濾;數據插值用于補充突發事件航跡點和不同設備間航跡的時間校對;數據關聯用于判斷不同設備獲取的航跡是否為同一目標;數據融合是將不同設備獲取的同一目標的信息進行融合,有利于提升態勢展示維度和效果。
(3)多級數據存儲層。根據實際業務需求,該層設計了三種數據存儲模式來存儲不同類型數據。一是將目標基礎信息、重要態勢數據、異常告警、突發事件等數據存儲于關系型數據庫MySQl。其中重要態勢數據是對融合后的態勢在時間和航向兩個維度進行了篩選過濾,例如,在每個固定時間間隔并且航向變化超過特定閾值時進行一次數據存儲。二是使用內存數據庫Redis存儲查詢頻率高、訪問時延低的業務數據,如目標名稱和唯一標識對應關系、目標最新一條態勢數據等。內存數據庫查詢速度快、并發性高,可以提升整體系統的吞吐能力和業務數據加載效率。三是使用支持大數據、分布式的列數據庫Hbase存儲海量歷史態勢數據。列數據庫具有高并發寫入、大數據實時查詢等優勢,能夠滿足海量態勢數據實時處理和查詢要求。
(4)支撐服務層。支撐服務層包含GIS服務、態勢回放控制服務、態勢實時監控服務和目標信息查詢服務。GIS服務提供了三維地理空間可視化平臺,能夠綜合呈現目標的位置、方向、速度、軌跡、基礎信息和特殊能力等信息。態勢回放控制服務基于不同回放方式、回放條件和控制信息分別從列數據庫和關系數據庫獲取歷史態勢數據,保證了態勢回放效率和穩定性。態勢實時監控服務提供目標最新的態勢數據,當客戶端首次請求數據時,該服務從內存數據庫中獲取系統最新的態勢數據,通過與客戶端建立長連接的方式,向客戶端實時推送態勢數據。目標信息查詢服務為目標可視化提供基礎數據支持。
(5)綜合展現層。綜合展現層基于瀏覽器實現態勢可視化和目標可視化。
3 系統實現
系統采用B/S(瀏覽器/服務器)模式作為基礎架構。瀏覽器端基于Vue3.0框架和UI控件Ant-design來構建可視化界面;采用Cesium三維地圖框架實現圖層、模型、目標能力及態勢航跡的渲染和繪制。服務器端基于Spring Boot框架實現態勢回放控制服務、態勢實時監控服務和目標信息查詢服務;通過發布離線瓦片地圖服務為瀏覽器端提供基礎地圖數據。接入服務基于Go語言框架開發,利用其協程特性提升服務的并發能力;數據融合處理服務采用Flink流處理技術對數據進行實時處理。
目前,該系統已經實現,并且應用于大型模擬對抗訓練中。系統運行部分截圖如圖4所示。該圖是對艦船和飛機的模擬數據進行了全景態勢回放,與一般的態勢回放系統不同,該系統增加了態勢與目標的聯合顯示。首先,圖中展示了部分機場、港口等靜態目標,同時可根據實際需求勾選展示更多靜態目標;其次,將艦船、飛機等動態目標的特殊能力進行三維可視化展示,并且隨態勢變化而移動,能夠清晰直觀地顯示動態目標的雷達探測范圍、火力打擊范圍等重要信息。圖5所示為目標能力三維可視化效果圖,其中(a)為艦船能力三維可視化圖,(b)為飛機能力三維可視化圖。表2給出了不同目標數量下態勢實時監控和態勢回放的系統平均響應時間,從表中結果可以看出,該系統在目標數量較多時仍能保持較快的響應時間。

圖5 目標能力三維可視化效果
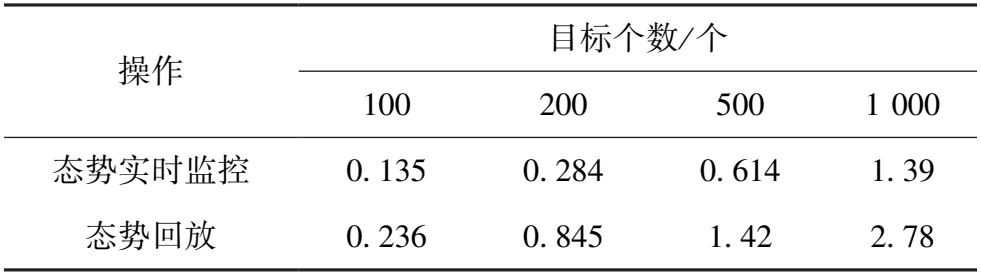
表2 不同目標數量下系統平均響應時間(s)
4 結論
本文設計并實現了一個目標與態勢三維可視化系統,首先討論了數據清洗、數據插值、數據融合、數據查詢等關鍵技術,接著通過系統結構分析,明確了系統的層次結構及各層之間的相互關系,最后從圖標、基本信息和特殊能力三個維度對目標進行可視化,從實時態勢監控和歷史態勢回放兩種方式對態勢進行展示,并且實現了態勢與目標的聯動展示。在實際應用中,該系統響應速度快、顯示內容豐富,對大型模擬對抗演習中目標與態勢的展示分析起到重要支撐作用。
猜你喜歡
世界科學技術-中醫藥現代化(2022年3期)2022-08-22 00:32:50
今日農業(2021年19期)2022-01-12 06:16:36
云南化工(2021年8期)2021-12-21 06:37:54
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
海洋信息技術與應用(2020年1期)2020-06-11 12:43:56
今日農業(2019年12期)2019-08-15 00:56:32
傳媒評論(2019年4期)2019-07-13 05:49:14
今日農業(2019年10期)2019-01-04 04:28:15