
車隊協同駕駛的車輛模型預測控制研究
2024-01-11 09:45:36馮挽強羅茶根張周平陳志偉涂培培
時代汽車 2023年23期
馮挽強 羅茶根 張周平 陳志偉 涂培培

摘 要:隨著科技的不斷發展,自動駕駛技術已經成為了當前汽車行業的研究熱點。其中,協同駕駛作為自動駕駛的一個重要分支,其目標是實現多輛車之間的信息共享和協同控制,以降低能耗、提高道路利用率和行駛安全性。然而,由于車輛間的通信延遲、不確定性以及環境復雜性等因素,協同駕駛的車隊模型預測控制算法還存在很多難點與挑戰。本文將對車隊協同駕駛的車隊模型預測控制算法進行研究,得出一種車隊協同駕駛的車隊模型預測控制算法。
關鍵詞:協同駕駛 模型預測 控制算法
1 概述
對于貨車、卡車等行駛軌跡相對固定的物流車而言,其高速行駛場景具備常見性,因此物流車高速場景有可能將成為最先實現的自動駕駛應用場景之一。協同駕駛,也稱為協同式自動駕駛,是自動駕駛的一個重要分支,其核心思想是在一定的區域內,多輛車通過共享信息并協同控制。協同駕駛的能明顯提高道路利用率和行駛安全性,除此之外,還能夠直接減低能源消耗,帶來可觀的經濟效益和社會效益。由車輛動力學方程可知,車輛車速超過80公里/小時,超過一半的驅動功率用于克服空氣阻力,商用車采用編隊行駛有利于減少空氣阻力降低能耗。研究表明,無人駕駛商用車輛如果采用車輛編隊方式行駛,可以降低約20%的車隊整體能源消耗。對于物流行業來說,車隊協同駕駛無疑是一個巨大的節能減排技術突破口。在目前“碳達峰、碳中和”的政策大環境下,車隊協同駕駛自然而然成為自動駕駛的研究熱點之一。
協同駕駛的實現,需要依賴先進智能網聯技術,包含通信技術、傳感器技術、決策控制技術等。由于車輛間的通信延遲、行駛意圖的不確定性以及環境復雜性等因素,協同駕駛的車隊模型預測控制算法還存在很多難點與挑戰。本文針對協同駕駛的車隊模型,進行預測控制算法研究,并行了仿真分析,得出一種車隊協同駕駛的車隊模型預測控制算法。
2 協同駕駛的車輛模型預測控制算法
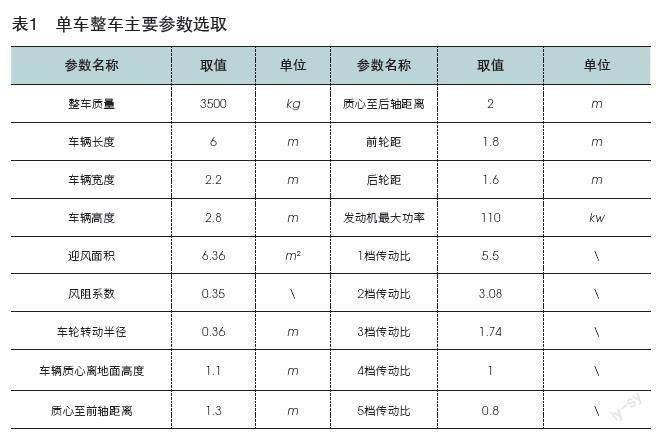
TruckSim是一款專門用于模擬多軸商用車和軍用車輛性能的軟件,該軟件具有直觀的用戶界面和強大的分析工具,使用戶可以構建復雜的場景并測試事件序列。TruckSim支持軟件在環、模型在環、硬件在環和駕駛員在環等模擬模式,優點是其動力學模型搭建過程簡單,并可以通過參數化配置整車參數。本文在仿真軟件Trucksim中建立單車動力學模型,單車的整車參數選取為見表1。
常見的車隊通信拓撲結構如下:
(1)前車跟隨式:每輛車只接收前面一輛車的信息;
(2)前車-首車跟隨式:每輛車接收前面一輛車和首車的信息;
(3)雙向跟隨式:每輛車接收前車和后車的信息;
(4)雙向-首車跟隨式:每輛車接收前車、后車和首車的信息;
(5)雙前車跟隨式:每輛車接收前面兩輛車的信息;
(6)雙前車-首車跟隨式:每輛車接收前面兩輛車和首車的信息
以上車隊通信拓撲結構中,前車-首車跟隨式在保證系統穩定性和安全性的同時有利于控制器的設計,故本文采用前車-首車跟隨模式。車隊運動學模型設置為在高速公路直道上從左至右同向行駛,第一輛車為領航首車,后車與前車期望間距為10米,車隊中包含首車一共有5臺車。
根據車輛幾何運動學相關理論,在車隊首車和后續車都處于平坦路面跟車狀態且可認為在瞬時的速度變化是連續的前提下,我們可以簡單得到關于車隊行駛的三階狀態空間方程,如式(1)所示:
式(1)中,S為車輛行駛縱向位移、V為車輛速度、α為車輛加速度,CD為空氣阻力系數,是當前速度下的慣性常數,matarget則是車輛的期望加速度。
在該控制系統內,通過反饋線性化不難得出,該控制系統與實際加速度的關系如式(2)所示:
式(2)中,K為慣性環節系統增益,τ為慣性環節時間常數。
通過聯立兩車間距物理模型,不難得出車隊兩車之間的誤差模型,如式(3)所示:
式(3)中,es為位移誤差,ev為速度誤差,S1為前車位移,S2為后車位移,dsafe為兩車最小安全距離,l為車長,對以上公式進行微分,可得到新的誤差模型,如式(4)所示:
式(4)中,c和μ為間距設定系數。
通過離散化和線性化,并通過前向歐拉差值,我們可以獲得車隊的模型預測控制狀態空間方程,如式(5)所示:
n為狀態量數,取為4;m為控制量數,取為1;所以其中是=
根據狀態空間的凸特性,我們可以構造二次性目標函數,本文構造的車隊的目標函數如式(6)所示:
式(6)中,為當前時刻輸出測量值,為輸出量的參考值,即間距誤差和速度誤差參考值,取為0;Q為誤差加權矩陣,反映對不同時刻逼近精度的比重程度;R為輸入加權矩陣,防止控制量過于劇烈變化;簡化后可得標準二次型目標函數,如式(7)所示:
至此,車隊協同駕駛的車輛預測控制模型建立完畢,下面進行仿真分析。
3 仿真分析
本文的仿真分析包括直道加減速和換道兩種工況。
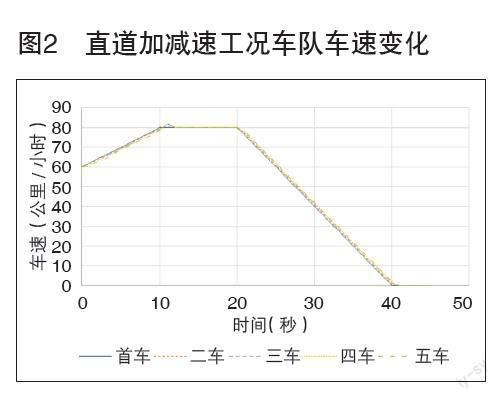
直道加減速工況:設置首車初始車速為60公里/小時,10秒內加速至80公里/小時,保持行駛10秒后,在20秒內從80公里/小時降至0公里/小時,仿真時間為50秒,仿真結果如圖1所示。
圖1的仿真結果表明:首車在0秒開始加速時,車隊后續車輛可以及時跟隨首車做出加速響應,車隊后續車輛跟隨首車速度依次存在一些延遲,車隊整體響應延遲時間在0.4秒以內,車速最大偏差在2公里/小時以內;首車在10秒時加速完畢,車速達到80公里/小時,車隊后續車輛跟隨首車速度在2秒達到一致,車隊后續車輛跟隨首車速度依次存在一些延遲,且后續車輛車速存在2公里以內的超調,車隊整體響應延遲時間在2秒以內;首車在20秒時開始減速,車隊后續車輛可以及時跟隨首車做出減速響應,車隊后續車輛跟隨首車速度依次存在一些延遲,車隊整體響應延遲時間在0.5秒以內,車速最大偏差在2公里/小時以內;首車在40秒時減速完畢,車速降至0公里/小時,車隊后續車輛跟隨首車速度在2秒達到一致,車隊后續車輛跟隨首車速度依次存在一些延遲,車隊整體存在2秒以內響應延遲時間。整個仿真過程中,車隊后續車輛車速依據距離首車遠近依次存在一些延遲,最終車速能隨首車收斂一致。
換道工況:設置車隊初始車速60公里,首車車速不變向左變道,首車行駛軌跡為給定軌跡,后續車輛不做同時變道響應,期望行駛軌跡為跟隨首車軌跡在同一區域變道。變道區域長度100米,寬度8米,仿真結果如圖3所示。
圖2中的曲線,是將整個車隊通過變道區域時每臺車輛的行駛軌跡疊加到一起得到。圖2中,橫坐標為車輛通過變道區域時車輛行駛軌跡的沿著行駛方向的坐標值,縱坐標為車輛通過變道區域時垂直于行駛方向的坐標值。仿真結果表明:在變道區域,車隊隨首車行駛軌跡變道,車隊后續車輛的行駛軌跡與首車存在偏差,且偏差值與后續車輛在車隊中位置沒有明顯依次增大關系。在通過沿行駛方向的同樣位置時,沿垂直于行駛方向的最大誤差在0.3米以內,車隊后續車輛行駛軌跡沿首車軌跡的跟隨性較好,車隊后續車輛最終行駛軌跡能隨首車行駛軌跡收斂一致。
4 總結
本文對車輛協同駕駛的車隊模型預測控制算法進行研究,并進行了仿真分析。仿真分析結果表明,在直道加減速工況和換道工況下,車隊的車速和行駛軌跡能跟隨首車車速和行駛軌跡變化,誤差較小,最后能隨首車的車速和軌跡收斂。因此,本文的車隊車輛協同駕駛的模型預測算法有效,可以為車隊協同駕駛提供一定的理論支持。未來的研究中可以增加更多的車聯運行工況,如車隊加入切入車輛作為干擾車輛,對更復雜的交通環境進行研究分析,也更加貼合實際車隊實際行駛運行環境。
車隊協同駕駛技術的落地,在技術突破的同時,也需要政策層面的支持。例如,交通法規對于高速路上車隊行駛間距的要求是大于10米的,要推動車隊協同駕駛落地,需要制定相關的法規和標準,在保證車輛的安全性和環保性的同時滿足制度合規性;需要建設協同駕駛相應的基礎設施,如高精度地圖、通信網絡等,以滿足車輛的協同駕駛的軟硬件技術需求。
參考文獻:
[1]Salari K,Sreenivas K,Taylor L. DOEs Effort to Reduce Truck Aerodynamic Drag through Joint Experiments and Computations[J].IEEE Transactions on Vehicular Technology,2005.
[2]Jennifer Chu,Sertac Karaman. Analysis finds autonomous trucks that drive in packs could save time and fuel [EB/OL]. December 20,2016[March 16,2022].https://news.mit.edu/2016/driverless-truck-platoons-save-time-fuel-1221.
[3]郭孔輝.非結構環境下智能車輛自主跟隨前車控制方法研究[D].北京理工大學,2017.
[4]靳林岳.自動駕駛車隊協同控制策略研究[D].北京交通大學,2022.
[5]張榮輝,游峰,初鑫男,等.車-車協同下無人駕駛車輛的換道匯入控制方法[J]. 中國公路學報,2018,31(4).
