基于先驗(yàn)地圖/GNSS/IMU融合的自動(dòng)駕駛車輛定位系統(tǒng)
2024-01-15 07:49:18熊華川
汽車工程師 2024年1期
熊華川
(重慶交通大學(xué),重慶 400074)
1 前言
精確的定位是自動(dòng)駕駛車輛實(shí)現(xiàn)自主導(dǎo)航的前提[1]。僅依靠單一傳感器的傳統(tǒng)定位方式無(wú)法克服復(fù)雜的環(huán)境條件,如全球衛(wèi)星導(dǎo)航系統(tǒng)(Global Navigation Satellite System,GNSS)在隧道、建筑遮擋條件下極易失效,不能滿足定位的穩(wěn)定性需求。針對(duì)復(fù)雜多變的環(huán)境,將多個(gè)傳感器的數(shù)據(jù)進(jìn)行融合實(shí)現(xiàn)定位是目前主流的定位方式。
其 中 ,GNSS/慣 性 測(cè) 量 單 元(Inertial Measurement Unit,IMU)融合定位是目前較流行的定位方案[2]。李慶成等[3]利用IMU 進(jìn)行位姿、速度等狀態(tài)預(yù)測(cè),再利用擴(kuò)展卡爾曼濾波(Extended Kalman Filter,EKF)算法融合GNSS 和車速傳感器數(shù)據(jù)來(lái)修正預(yù)測(cè)狀態(tài)值,從而為礦用車提供精準(zhǔn)的定位數(shù)據(jù)。Musavi 等[4]同樣通過(guò)融合GNSS 和IMU數(shù)據(jù)實(shí)現(xiàn)精確定位,不同的是采用的融合算法為自適應(yīng)神經(jīng)觀測(cè)器。李鵬等[5]在融合GNSS 和IMU 數(shù)據(jù)的基礎(chǔ)上,提出丟棄惡化的觀測(cè)量策略,以降低觀測(cè)量精度較差時(shí)系統(tǒng)所受影響。因此,GNSS 與IMU 融合的定位算法均利用IMU 通過(guò)航位推算技術(shù)進(jìn)行位姿估計(jì),IMU 長(zhǎng)時(shí)間積分會(huì)產(chǎn)生累積誤差[6],需通過(guò)GNSS 修正預(yù)測(cè)值。但當(dāng)GNSS 失效或者受環(huán)境影響變得低效時(shí),反而會(huì)降低定位系統(tǒng)的精度。
目前,利用激光雷達(dá)點(diǎn)云與先驗(yàn)地圖匹配定位的方法同樣是研究熱點(diǎn)。可以通過(guò)實(shí)時(shí)定位與地圖構(gòu)建(Simultaneous Localization and Mapping,SLAM)方法來(lái)構(gòu)建先驗(yàn)地圖,再利用激光雷達(dá)掃描得到的點(diǎn)云與先驗(yàn)地圖進(jìn)行匹配獲取位姿。基于迭代最近點(diǎn)匹配(Iterative Closest Point,ICP)算法是其中最常見(jiàn)的方法[7-8],但該方法適用于少量點(diǎn)云的匹配運(yùn)算。Droeschel 等[9]提出通過(guò)構(gòu)建柵格局部地圖與點(diǎn)云進(jìn)行匹配,并通過(guò)分層優(yōu)化的方式優(yōu)化匹配結(jié)果。以上方法都是在點(diǎn)云特征的基礎(chǔ)上進(jìn)行計(jì)算優(yōu)化,當(dāng)出現(xiàn)大規(guī)模點(diǎn)云,以及兩幀之間數(shù)據(jù)變化劇烈等情況時(shí),點(diǎn)云配準(zhǔn)均出現(xiàn)耗時(shí)長(zhǎng)、準(zhǔn)確率低的現(xiàn)象。因此,僅依靠激光雷達(dá)的地圖匹配方法不能滿足定位系統(tǒng)的要求。
針對(duì)以上問(wèn)題,本文提出利用誤差卡爾曼濾波(Error State Kalman Filter,ESKF)算法融合GNSS、IMU 和先驗(yàn)地圖點(diǎn)云數(shù)據(jù),再通過(guò)引入矩陣校正方法,避免GNSS 失效或先驗(yàn)地圖匹配延遲等情況下系統(tǒng)無(wú)法獲取有效觀測(cè)值以修正位姿的問(wèn)題,使系統(tǒng)保持穩(wěn)定和高精度狀態(tài)。
2 多傳感器融合算法
本文算法的整體框架如圖1所示。本文采用的數(shù)據(jù)融合算法為ESKF 算法[10],相較于EKF 算法,其具有以下優(yōu)勢(shì)[11]:ESKF 主要針對(duì)誤差狀態(tài)量進(jìn)行處理,誤差狀態(tài)量通常較小,因此計(jì)算量小,且總是在原點(diǎn)附近,可避免奇異值,保證線性化的合理性和有效性;在旋轉(zhuǎn)處理方面,ESKF 可以用三維變量來(lái)表示旋轉(zhuǎn)增量。
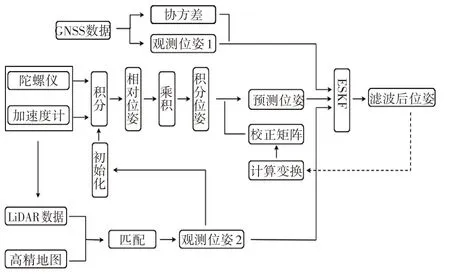
圖1 多傳感器融合定位系統(tǒng)框架
本文的整體框架分為3個(gè)部分:
a. 數(shù)據(jù)預(yù)處理。接收到IMU 原始數(shù)據(jù)和激光雷達(dá)數(shù)據(jù)后,根據(jù)IMU 推算出車輛在激光雷達(dá)幀內(nèi)的位姿變化,進(jìn)而完成點(diǎn)云去畸變。
b.激光與點(diǎn)云地圖匹配。通過(guò)SLAM 算法構(gòu)建先驗(yàn)地圖,并將GNSS 信息作為先驗(yàn)地圖的初始坐標(biāo),完成對(duì)多傳感器輸出位姿的坐標(biāo)系統(tǒng)一,再利用正態(tài)分布變換(Normal-Distributions Transform,NDT)算法將每一幀去畸變的點(diǎn)云與先驗(yàn)地圖進(jìn)行匹配輸出位姿。
c.濾波。利用ESKF 算法融合IMU 推算出的狀態(tài)值、激光雷達(dá)與先驗(yàn)地圖匹配輸出的位姿以及GNSS 輸出的位姿。通過(guò)觀測(cè)信息修正IMU 推算出的狀態(tài)值。
2.1 初始化
本文所使用的IMU 由陀螺儀和加速度計(jì)組成。根據(jù)二者特性可以對(duì)IMU 測(cè)量的加速度和角速度進(jìn)行數(shù)學(xué)建模:
式中,am、wm分別為IMU 加速度、角速度的測(cè)量值;at、wt分別為IMU 加速度、角速度的真實(shí)值;ba、bw分別為加速度零偏和角速度零偏;ηa、ηw分別為加速度、角速度測(cè)量噪聲;CNI為IMU 坐標(biāo)系到慣性坐標(biāo)系的變換矩陣;g為重力加速度。
在初始化階段,對(duì)IMU 的加速度零偏和角速度零偏進(jìn)行估計(jì)。具體而言,當(dāng)車輛靜止時(shí),除加速度計(jì)的Z向加速度與重力加速度相等外,IMU 的數(shù)值均應(yīng)為零,因此車輛靜止時(shí)IMU 的加速度和角速度測(cè)量結(jié)果即可認(rèn)為是IMU 的零偏值[12]。隨后,使用激光雷達(dá)匹配先驗(yàn)地圖輸出的位姿作為基準(zhǔn),對(duì)初始位姿進(jìn)行估計(jì)。這種方法使得系統(tǒng)能夠在任何地點(diǎn)進(jìn)行初始化,無(wú)需考慮GNSS的狀態(tài)。
2.2 運(yùn)動(dòng)模型
ESKF 將系統(tǒng)狀態(tài)分為不考慮噪聲的名義狀態(tài)和誤差狀態(tài)。二者相加即為真值狀態(tài):
式中,Xt為系統(tǒng)真值狀態(tài);Xn為系統(tǒng)名義狀態(tài);δX為系統(tǒng)誤差狀態(tài);p、δp分別為名義位置狀態(tài)量、誤差位置狀態(tài)量;v、δv分別為名義速度狀態(tài)量、誤差速度狀態(tài)量;q、δθ分別為名義姿態(tài)狀態(tài)量、角度誤差狀態(tài)量;δg為誤差重力加速度狀態(tài)量;δbw、δba分別為誤差角速度零偏狀態(tài)量、誤差加速度零偏狀態(tài)量。
根據(jù)IMU 航位推算算法,可以得到名義狀態(tài)的離散形式:
式中,pk、vk、qk、ba(k)、bw(k)、gk分別為k時(shí)刻名義位置狀態(tài)量、名義速度狀態(tài)量、名義姿態(tài)狀態(tài)量、加速度零偏狀態(tài)量、角速度零偏狀態(tài)量、重力加速度狀態(tài)量。
根據(jù)名義狀態(tài)與誤差狀態(tài)的關(guān)系可以推算出誤差狀態(tài)的離散形式:
式中,δpk、δvk、δθk、δba(k)、δbw(k)、δgk分別為k時(shí)刻誤差位置狀態(tài)量、誤差速度狀態(tài)量、角度誤差狀態(tài)量、誤差加速度零偏狀態(tài)量、誤差角速度零偏狀態(tài)量、誤差重力加速度狀態(tài)量;ηv、ηθ、ηba、ηbw為隨機(jī)噪聲;Δt為IMU采樣時(shí)間。
根據(jù)系統(tǒng)誤差狀態(tài)方程,可以得到ESKF 預(yù)測(cè)方程和預(yù)測(cè)的協(xié)方差矩陣:
2.3 觀測(cè)模型
本文的觀測(cè)數(shù)據(jù)分別由GNSS 和激光雷達(dá)與先驗(yàn)地圖提供。二者的觀測(cè)模型構(gòu)建為:
式中,YGNSS、YLiDAR為GNSS 觀測(cè)量、雷達(dá)匹配觀測(cè)量;h()、f()分別為GNSS 觀測(cè)方程、雷達(dá)匹配觀測(cè)方程;V、R分別為GNSS 觀測(cè)量的協(xié)方差矩陣、雷達(dá)匹配觀測(cè)量的協(xié)方差矩陣。
根據(jù)二者的輸出為位姿,可以將觀測(cè)模型統(tǒng)一寫作:
式中,Y為觀測(cè)量;F為觀測(cè)方程系數(shù)矩陣;Pobs為觀測(cè)量的協(xié)方差矩陣;H為觀測(cè)方程對(duì)誤差狀態(tài)的雅可比矩陣。
根據(jù)ESKF 的修正公式,可以分別得到對(duì)誤差狀態(tài)的修正值和協(xié)方差矩陣:
式中,K為卡爾曼增益;Xcertify(k+1)為(k+1)時(shí)刻修正后的狀態(tài)量;Xn(k+1)為(k+1)時(shí)刻名義狀態(tài)量;⊕表示廣義相加。
隨后,通過(guò)將修正后的誤差量與名義狀態(tài)量進(jìn)行廣義相加即可得到最終的系統(tǒng)真值狀態(tài)量。這一過(guò)程能夠有效減小預(yù)測(cè)值的誤差,提高系統(tǒng)的精度。
2.4 校正矩陣
GNSS 信號(hào)在高樓、隧道等環(huán)境下極易受到干擾,導(dǎo)致定位精度下降甚至失效,因此不能作為觀測(cè)值使用。激光雷達(dá)雖然可以克服環(huán)境的影響,但其匹配過(guò)程耗時(shí)較長(zhǎng),無(wú)法滿足車輛對(duì)實(shí)時(shí)定位的需求。另一方面,IMU 的采樣頻率遠(yuǎn)高于GNSS 和激光雷達(dá)的采樣頻率,不同頻率下的觀測(cè)值同樣不能實(shí)時(shí)更新,如圖2所示。針對(duì)以上問(wèn)題,本文提出一種矩陣校正方法,以在GNSS 失效或激光雷達(dá)匹配延遲的情況下近似估計(jì)系統(tǒng)的狀態(tài),避免系統(tǒng)因累積誤差快速發(fā)散。具體地,利用修正位姿與預(yù)測(cè)位姿之間的相對(duì)位姿作為校正矩陣,當(dāng)下一幀沒(méi)有合適的觀測(cè)值時(shí),則利用校正矩陣修正系統(tǒng)位姿,以彌補(bǔ)GNSS 和激光雷達(dá)的局限性,提高系統(tǒng)的實(shí)時(shí)性和定位精度:
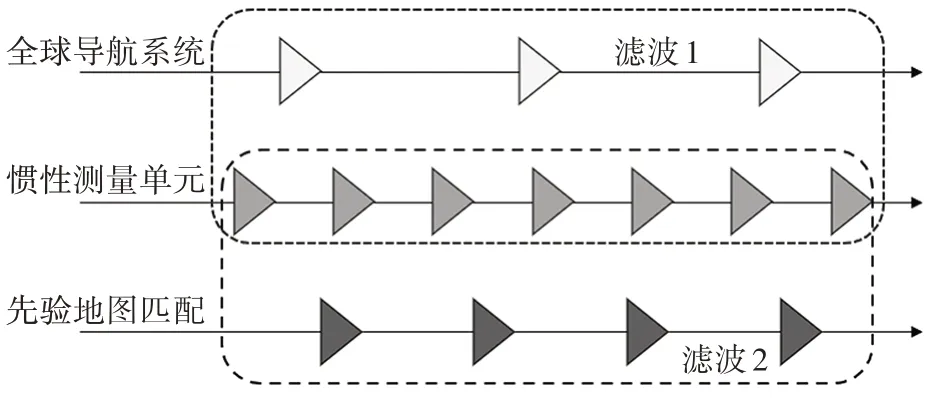
圖2 傳感器輸出對(duì)比
式中,ΔC為校正矩陣;Ccertify、Cpredict分別為位姿的修正矩陣和預(yù)測(cè)位姿。
3 試驗(yàn)驗(yàn)證
3.1 試驗(yàn)設(shè)備
本文試驗(yàn)由基于吉利博瑞改裝的智能車實(shí)現(xiàn),如圖3所示。智能車搭載的試驗(yàn)設(shè)備有:車頂前、后放置的2根GNSS蘑菇頭天線,車頂中央處3顆16線激光雷達(dá),后備箱處的GNSS信號(hào)接收機(jī)和IMU設(shè)備。

圖3 試驗(yàn)用智能車
3.2 試驗(yàn)數(shù)據(jù)
為驗(yàn)證本文算法的有效性,首先通過(guò)試驗(yàn)車在校園內(nèi)進(jìn)行GNSS、IMU 和激光雷達(dá)數(shù)據(jù)采集,采集路線如圖4所示,分別通過(guò)空曠路段、遮擋和隧道路段,來(lái)驗(yàn)證當(dāng)GNSS 失效或低效狀態(tài)下系統(tǒng)狀態(tài)的穩(wěn)定性。

圖4 數(shù)據(jù)采集路線
根據(jù)采集的激光雷達(dá)數(shù)據(jù),通過(guò)SLAM 算法構(gòu)建定位系統(tǒng)中的先驗(yàn)地圖,如圖5所示。
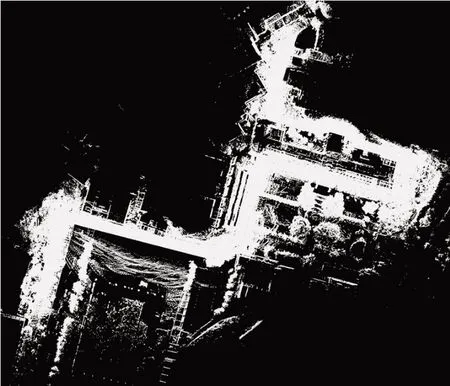
圖5 先驗(yàn)地圖
3.3 試驗(yàn)結(jié)果分析
為驗(yàn)證定位系統(tǒng)的有效性,根據(jù)采集的數(shù)據(jù)分別進(jìn)行IMU航位推算、GNSS/IMU組合定位和先驗(yàn)地圖/GNSS/IMU組合定位的算法驗(yàn)證以及結(jié)果對(duì)比。
如圖6 所示為IMU 進(jìn)行航位推算的結(jié)果,可見(jiàn)IMU 在積分時(shí)速度隨著誤差累積而發(fā)散,導(dǎo)致最終的軌跡和以四元數(shù)[qw,qx,qy,qz]T表示的位姿均隨之發(fā)散,由式(5)可知,發(fā)散的速度成指數(shù)級(jí)增長(zhǎng),因此需要其他數(shù)據(jù)來(lái)抑制IMU的誤差。
圖6 IMU航位推算軌跡、速度和位姿
分別利用GNSS/IMU組合定位算法和先驗(yàn)地圖/GNSS/IMU 組合定位算法生成定位軌跡,如圖7 所示。其中包括樹林遮擋、隧道等影響GNSS 狀態(tài)的路段,如圖8 所示。圖9 所示為整條軌跡中GNSS 狀態(tài)變化曲線,其中GNSS狀態(tài)定義如表1所示。由圖9 可以看出,經(jīng)過(guò)特殊路段時(shí),GNSS 的狀態(tài)都不為4,根據(jù)表1,GNSS 其處于精度較差甚至失效狀態(tài)。從圖7中可知,在空曠路段,兩類算法輸出的軌跡幾乎重合,且平滑性好。差別體現(xiàn)在GNSS 低效處,即圖7中特殊路段處,GNSS/IMU 組合算法明顯較先驗(yàn)地圖/GNSS/IMU 組合算法具有更大的誤差偏移。并且值得注意的是,當(dāng)GNSS 失效后,軌跡并沒(méi)有立即如圖6一樣發(fā)散,而是隨著GNSS失效后的時(shí)間推移而逐漸發(fā)散,這是校正矩陣作用的結(jié)果,校正矩陣可有效延緩系統(tǒng)狀態(tài)的發(fā)散。
表1 GNSS狀態(tài)定義
圖7 軌跡對(duì)比
圖8 特殊路段場(chǎng)景
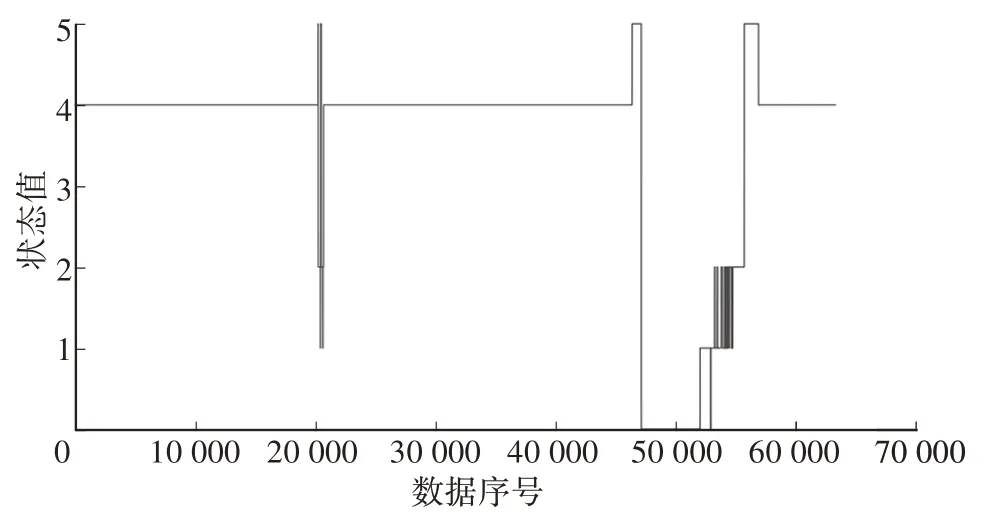
圖9 GNSS狀態(tài)
4 結(jié)束語(yǔ)
本文通過(guò)ESKF 算法融合GNSS/IMU/先驗(yàn)地圖構(gòu)建自動(dòng)駕駛車輛實(shí)時(shí)定位系統(tǒng),并引入校正矩陣提高了系統(tǒng)的魯棒性。試驗(yàn)結(jié)果表明,在GNSS 低效甚至失效的情況下,先驗(yàn)地圖/GNSS/IMU 組合算法能夠很好地抑制系統(tǒng)因誤差累積而發(fā)散,從而為自動(dòng)駕駛車輛提供穩(wěn)定、精準(zhǔn)的定位結(jié)果。
但是,本文提出的方法依賴于高精地圖,高精地圖的制作和維護(hù)將限制其應(yīng)用。下一步的改進(jìn)方向應(yīng)是從高精點(diǎn)云地圖中提取道路交通信息,以構(gòu)建矢量地圖。矢量地圖的維護(hù)成本遠(yuǎn)小于高精點(diǎn)云地圖的維護(hù)成本,且道路交通信息不會(huì)輕易改變。