基于最佳滑移率的摩托車轉彎制動系統設計
2024-01-18 10:13:46張曉東
寧德師范學院學報(自然科學版) 2023年4期
張曉東,潘 茹
(1.寧德師范學院 信息與機電工程學院,福建 寧德 352100;2.國網寧夏電力有限公司 超高壓公司,寧夏 銀川 750010)
汽車極大方便了人們的出行,然而汽車數量的增加也引發了城市交通擁堵、停車困難等諸多問題.摩托車因輕便靈活、占地面積小,在擁堵的城市中具有更高的機動性和出行效率,現已成為群眾短途出行的重要交通工具之一.根據中國公安部交通管理局發布的數據,2021年全國摩托車新注冊登記1 005萬輛,比2020年增加了179萬輛[1].摩托車的平均行駛速度高達80 km·h-1,然而摩托車結構類似于倒單擺,屬于靜態不穩定系統,在轉彎情況下具有較大的側傾角,存在車輛側翻的風險.如果在轉彎工況下施加制動,則側翻風險急劇增加.近年來,隨著智能控制技術的發展,主動安全系統如電子穩定程序(electrical speed controller,ESC)、車輛穩定控制(vehicle stability control,VSC)等已廣泛應用于汽車,有效提高了汽車的安全性,然而在摩托車領域應用較少.在中國制造向高質量發展的大背景下,摩托車由量產轉向高端制造已成必然趨勢,而且民眾的騎行安全意識也在逐漸提高,研究和開發摩托車主動安全系統,提高摩托車的安全性具有重要的現實意義[2-3].
制動系統是摩托車主動安全系統的重要組成部分,用于摩托車的防抱死制動系統(antilock brake system,ABS)于20 世紀80 年代末推出,通過在硬制動時保持車輪旋轉從而縮短制動距離.試驗表明:ABS 通常提供更短的停車距離,增加制動穩定性,防止摩托車手摔倒[4].為進一步提高制動性能,諸多學者開展了相關研究.Ganesh 等[5]提出了變制動力系統,該系統根據輪胎與地面之間的垂直載荷改變有效制動盤半徑來調整制動力;Thomas 等[6]提出了摩托車穩定控制(motorcycle stability control,MSC)系統,該系統結合了ABS、電子制動系統、牽引力控制和慣性傳感器,根據車輛狀態,調整制動或者牽引力以提高車輛安全性;Baumann 等[7]使用模型預測控制算法(model predictive control,MPC)在前輪和后輪之間分配制動力,以減少轉彎時的轉向力矩,以保持車輛方向穩定性;More 等[8]基于線性PID 控制策略,設計了用于摩托車的防抱死制動系統,電子控制單元根據輪速、車速計算滑移率,并反饋給PID 控制器,PID 控制器調整制動力矩以控制輪胎的滑移率為參考滑移率(-0.2);吳龍輝[9]通過分析摩托車制動器制動力、地面制動力與附著力之間的關系提出了摩托車在不同附著系數路面上前后輪制動器制動力理想分配曲線;Soni 等[10]通過分析直線與轉彎工況中的車輛側傾角、車身和路面摩擦系數的影響,確立前后輪制動力分配方法,并設計了聯合制動系統,最后利用BikeSim 和Simulink 軟件進行聯合仿真,驗證其合理性;Melnikov 等[11]提出的制動控制策略通過識別地面對車輪側向作用力的導數產生控制信號,當側向作用力導數為負,則輪胎出現側滑,有失穩的趨勢,應重新調整制動力,該系統類似于汽車的電子穩定控制系統(electronic stability program,ESP),增加了摩托車的制動穩定性和可控性;Lin 等[12-13]基于自適應控制算法提出了可變聯合制動系統,前后輪的制動器制動力分配比通過自適應算法進行調整;Fernandez 等[14]提出了基于模糊邏輯的防抱死制動系統,摩托車參數經過擴展性卡爾曼濾波器估測出滑移率與路面附著系數.將當前滑移率與最佳滑移率的偏差及偏差變化率、路面附著系數輸入至模糊邏輯產生控制命令,為改善模糊邏輯控制性能,采用協同進化算法進行控制參數優化;Phalke等[15]考慮懸架的影響,提出了前后輪聯合制動時的制動力最佳分配方法.
綜合上述研究現狀:文獻[6,7,9,10,12,13]只是基于防止輪胎抱死的角度,提出了摩托車制動系統,缺少對輪胎模型的系統研究.輪胎是車輛的重要組成部分,輪胎與地面的接觸力對車輛制動時的穩定性起著關鍵作用.文獻[8]基于輪胎滑移率進行制動控制,直接將最佳滑移率定義為縱向力最大時的對應值(-0.2),該制動策略在直線行駛制動時具有較高的制動性能,但是在轉彎情況下,可能會因側向力不足造成失穩.文獻[11]提出基于側向力變化率的制動系統保證了車輛的穩定性,但是對制動性能缺少相關分析.文獻[14]和[15]提出的制動系統主要適用于直線制動情形.Pacejka[16]的研究表明:當摩托車轉彎制動時,除了縱向制動力外,還存在由地面施加的側向力來抵消離心力.充足的側向力是保證車輛穩定的重要因素,但縱向力和側向力受摩擦橢圓的影響.鑒于此,文中通過輪胎模型分析縱向與側向特性并建立最佳滑移率決策模型,基于模糊PID 算法建立制動系統,最后利用Matlab/Simulink 和BikeSim聯合仿真對所提出的轉彎制動系統的制動性能進行仿真以驗證其合理性.
1 摩托車輪胎建模
車輛通過輪胎與地面接觸,地面對輪胎的作用力直接影響車輛的驅動、制動和轉向過程中的操縱穩定性.地面對輪胎的作用力與輪胎運動情況相關,輪胎建模旨在建立輪胎運動與地面作用力之間的數學模型.輪胎模型的輸入與輸出變量如圖1所示.

圖1 輪胎模型的輸入與輸出變量
為描述輪胎的運動學與力學參數,建立輪胎坐標系如圖2所示.坐標系原點O為輪胎面和地面的交線與車輪旋轉軸線在地平面上投影線的交點;車輪面與地面的交線為x軸,向前為正方向;z軸垂直于地面,向上為正方向;根據右手定則,y軸方向隨之確定.相關運動學與動力學參數如圖2標注所示.

圖2 輪胎坐標系與相關參數
輪胎行駛方向示意圖如圖3 所示.輪胎受到路面側向傾斜、側向風力或離心力作用時,地面對輪胎產生側向作用力(Fy),由于輪胎側向彈性的因素,行駛速度方向偏離輪胎面,發生側偏現象,速度方向與x軸的夾角為側偏角(α).側偏角是影響輪胎側向力的重要因素.行駛速度(V)在x軸和y軸的投影分別為縱向速度(Vx)和側向速度(Vy).當摩托車在轉向制動情況下,除了存在側偏現象外,胎面與地面發生一定程度的相對滑動,輪胎處于邊滾邊滑的狀態,即存在縱向滑移速度(Vsx)與側向的滑移速度(Vsy),其中側向滑移速度等于(Vy).
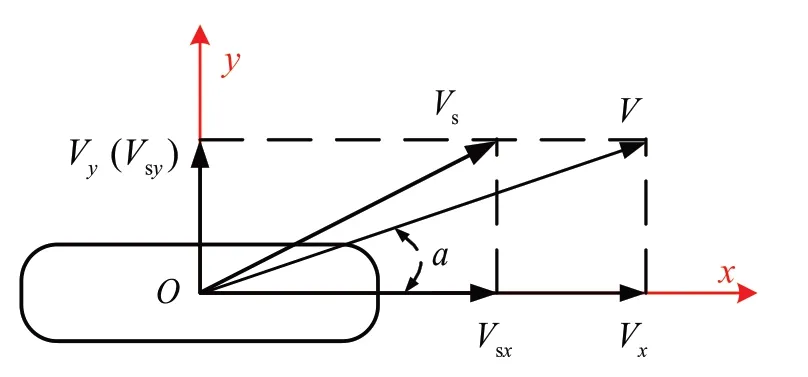
圖3 輪胎速度示意圖
縱向滑移率是輪胎產生縱向力的重要因素.縱向滑移率(κ)和側偏角(α)的計算式如下
在地面對輪胎的作用力中,縱向作用力直接影響車輛制動性能,側向力對車輛穩定性具有重要影響.當摩托車轉彎制動時,地面對輪胎同時施加縱向力與側向力,其中側向力用于抵消曲線運動產生的離心力,以保持車輛平衡,因此輪胎縱向和側向特性對車輛轉彎制動至關重要.為此首先需要建立輪胎力學模型,輪胎模型具有高度非線性,目前具有代表性的輪胎力學模型有:刷子模型、Filala模型、統一輪胎模型和魔術公式.其中,刷子模型、Fiala 模型和統一模型以汽車輪胎為研究對象,針對摩托車輪胎的研究較少.相比于汽車輪胎,摩托車輪胎具有較大的側傾角,Pacejka[16]提出的魔術公式是一種經驗模型,通過三角函數的組合擬合輪胎實驗數據,模型精度高、形式統一、魯棒性強,對摩托車輪胎也進行了深入研究.魔術公式已經有較為成熟的應用,如美國MSC 開發的BikeSim 軟件集成大量的輪胎實驗數據.魔術公式正在成為輪胎行業的標準.鑒于此,采用魔術公式建立輪胎模型.
當輪胎只有縱向滑移,沒有側向滑移時,縱向力計算式為
式中:Bx為剛度因子;Cx為形狀因子;Dx為峰值因子;Ex為曲率因子.水平位移SHx和垂直位移SVx分別表示簾布層轉向效應、圓錐度和滾動阻力的影響.
當輪胎同時存在縱向與側向滑移時,引入權重因子Gxα表征側向滑移對縱向力的影響.縱向力計算式為
同理,在純側向滑移工況下,側向力計算式為
對于聯合滑移工況,引入權重因子Gyκ表征縱向滑移對側向力的影響.聯合滑移時的側向力計算式為
在式(3~6)中,剛度因子、形狀因子、峰值因子和曲率因子受滑移率、側偏角、外傾角等運動學和動力學參數的影響.以180/55ZR17 摩托車輪胎為研究對象,借助BikeSim 軟件得到該輪胎的魔術公式參數.通過Matlab 軟件建立輪胎模型,并將BikeSim 中的參數代入模型中.令滑移率、側偏角和垂直載荷取不同的值,分析輪胎的縱向與側向特性.
輪胎縱向特性如圖4 所示.由圖可知:當滑移率為0.15~0 時.縱向力隨著滑移率絕對值的增加而增加,當滑移率進一步增加,縱向力下降.因此在制動工況下,滑移率絕對值過大會導致制動性能減弱.當車輛處于轉彎制動工況時,輪胎同時存在縱向滑移和側偏現象.由圖4(a)可知:側偏角度越大,縱向力越小,摩托車在制動過程中前后輪會發生荷載遷移,造成前后輪垂直載荷的變化;由圖4(b)可知:不同垂直載荷時的最大縱向力所對應的滑移率約為-0.15,摩托車與汽車最大的不同在于外傾角,汽車外傾角較小,摩托車轉彎工況下具有較大的外傾角;由圖4(c)可知:輪胎傾斜一定程度上導致縱向力減小.

圖4 輪胎的縱向特性
輪胎側向特性如圖5 所示.在轉彎制動工況下,側偏角較小時,地面對輪胎的側向力與側偏角呈線性變化.側偏角超過5°,側向力趨于定值,輪胎發生側滑.由圖5(a)可知:滑移率越大,地面能夠提供的側向力越小,當輪胎抱死,滑移率為-1,側向力幾乎為0,此時車輛將發生嚴重的側滑;圖5(b)為外傾角γ取不同值時對側偏特性的影響,外傾角越大,地面能夠提供的側向力越小,摩托車在轉彎工況下存在較大的外傾角,應注意防止側滑現象;縱向力對側偏特性的影響如圖5(c)所示,縱向力與側向力組成的摩擦橢圓,在側偏角一定的情況下,隨著縱向力的增加,由于輪胎側向彈性的改變,側向力有所減小.當縱向力很大時已經耗去大部分附著力,而側向能利用的附著力減少.因此在轉彎制動工況下,片面追求制動性能容易導致側向力不足造成側滑,需要保證側向穩定的前提下進行制動.

圖5 輪胎側向特性
綜合上述輪胎特性分析可知:地面對輪胎的作用力受到滑移率、側偏角、外傾角、垂直載荷的影響,其中滑移率可控性強,通過調整滑移率可以同時控制縱向力與側向力,滑移率越靠近0,側向力越大.當滑移率為-0.15時,縱向力最大,側向力有所減小.摩托車轉彎制動過程中,既需要側向力保持車輛穩定,又要有縱向力確保車輛制動停車,滑移率可以作為轉彎制動控制系統的輸入,實現對車輛穩定性與制動性的控制.
2 最佳滑移率決策模型
摩托車轉彎工況下的受力如圖6 所示,車身傾斜一定角度以平衡離心力.車身傾斜角(φ)導致輪胎產生外傾角(γ).在穩定轉彎的情況下,車身側傾角與輪胎外傾角相同,根據力平衡原理,作用在車輪上的離心力的計算式為

圖6 摩托車轉彎受力示意圖
式中:FC為離心力;φ為側傾角.車身側傾角越大,產生的離心力越大,需要地面提供更大的側向力(Fy)來保持車輛穩定.
當摩托車在轉彎剎車時,兩個車輪同時受到縱向力和側向力的作用.縱向力屬于制動力,決定了制動性能,側向力則關系到車輛的穩定性.輪胎模型分析表明:橫向力和縱向力受滑移率的影響,因此這兩個力可通過改變滑移率來控制.適當的滑移率可以讓車輛安全穩定的制動.摩托車失穩主要表現為側傾角急劇增大發生傾覆,因此對輪胎制動的最佳滑移率由較大時,摩托車有傾覆的危險,應減小滑移率,讓地面提供足夠的側向力保持車輛穩定.當較小時,摩托車相對安全,可適當調整滑移率接近-0.15,地面提供足夠的制動力.鑒于前輪側滑導致的傾覆風險高于后輪,經過反復試驗,令常數C取3,前輪采用高斯隸屬函數確立前輪最佳滑移率,高斯隸屬函數如式(8).前輪控制策略如圖7所示.

圖7 前輪最佳滑移率決策模型
后輪控制策略如圖8所示.后輪采用線性函數確定最佳滑移率,即

圖8 后輪最佳滑移率決策模型
3 轉彎制動系統設計與仿真
摩托車轉彎制動控制系統結構如圖9 所示.該系統由3 部分組成:前后輪最佳滑移率決策模型、控制系統和摩托車動力學模型.摩托車側傾角與側傾角速度輸入至前后輪最佳滑移率決策模型產生最佳滑移率,最佳滑移率與當前滑移率差值輸入至控制系統,控制系統產生控制信號控制前后輪滑移率,車輛動態反饋至滑移率決策模型和控制系統,形成了閉環控制.

圖9 摩托車轉彎制動系統示意圖
摩托車在靜止狀態不能保持穩定,轉彎工況下側傾角較大,是一個高度非線性系統.鑒于BikeSim 軟件在仿真摩托車動力學方面的成熟應用,采用BikeSim 模擬圖9中的摩托車動力學模型.摩托車屬于非線性系統,控制策略應該具備自適應、學習、推理功能[17].智能控制技術如模糊邏輯控制、神經網絡、滑模控制等為控制系統設計理論依據.其中,模糊邏輯控制原理如圖10 所示.該控制策略不依賴被控對象的數學模型,而是以人對被控對象的控制經驗和知識為依據,建立數據庫和規則庫.控制系統可以根據知識庫與規則庫進行模糊推理,向被控對象給出控制命令.模糊控制適用于傳統控制方式難以解決的問題,如建模困難、多變量強耦合、高度非線性等,對高度非線性系統具有魯棒性.然而,模糊控制的精度在很大程度上取決于數據庫和反復測試的規則庫,不易消除靜態誤差.

圖10 模糊控制原理
針對模糊控制容易存在穩態誤差的不足,采用模糊PID 控制策略對摩托車進行控制,模糊PID 控制由模糊邏輯和PID 控制器組成.PID 控制器由于其簡單、精確等優點,在許多領域得到了廣泛的應用.然而,對于數學模型未知的高度非線性系統,傳統PID控制參數如比例系數、積分系數、微分系數等固定不變,影響控制性能.模糊邏輯為PID參數自整定提供了可能,模糊PID控制系統原理如圖11所示.根據輸入誤差和及其變化率,采用模糊邏輯對PID 參數進行調整,既消除了穩態誤差,又提高了控制系統的自適應性.

圖11 模糊PID控制系統
為驗證轉彎制動系統的合理性,根據圖9 在Matlab/Simulink 環境中創建轉彎制動系統仿真模型,包括最優滑移率決策模型和模糊PID 控制器.BikeSim 仿真的摩托車動力學參數通過交互接口傳輸至Simulink,由此形成BikeSim與Matlab的聯合仿真.
基于最佳滑移率的制動系統仿真結果如圖12所示.摩托車初始狀態如圖12(a)所示,所示初始速度為80 km·h-1,初始側傾角為-21°.摩托車開始制動,其動力學參數變化曲線如圖12(b~f).在3.5 s內車身側傾角〔圖12(b)〕逐漸減小至5°,同時車速〔圖12(c)〕也降低至0,摩托車平穩停車.當車速較小且側傾角也較小的情況下,輪胎抱死,制動效率高.在3.3 s時,速度小于5 km·h-1,兩個輪胎抱死,輪速存在一定的突變.前后輪側偏角變化曲線如圖12(d)所示,側偏角在-2°和2°之間,因此制動系統具有較好的方向穩定性.制動減速度和制動距離如圖12(e)和圖12(f)所示,平均制動減速度為-6.6 m·s-2,制動距離為40 m,驗證了制動系統具有優良的制動性能.前后輪滑移率變化曲線如圖12(g)和圖12(h)所示,由于側傾角與側傾角速度的變化,前后輪最佳滑移率隨之實時調整,兼顧了制動性與方向穩定性,輪胎滑移率與最佳滑移率保持一致,模糊PID控制性能良好.

圖12 基于最佳滑移率的制動系統仿真
根據輪胎動力學分析,最大附著系數出現在滑差率在-0.15 至-0.2 之間,傳統的防抱死制動系統往往將制動系統的最佳滑移率固定為-0.2.為了進行對比分析,應用文獻[8]的ABS對轉彎的摩托車進行制動仿真,該制動系統的最佳滑移率為固定值(-0.2).除了最佳滑移率不同外,設定相同的仿真條件:初始車速為80 km·h-1,初始側傾角為-21°,仿真結果如圖13 所示.由圖13(a)可知:1 s 內車身側傾角度迅速增大到80°左右,摩托車突然發生側翻;由圖13(b)可知,由于側向力不足,兩個輪胎側滑角發生較大變化,導致側滑翻車,將滑移率固定為-0.2不適用于轉彎制動情形,最佳滑移率宜根據車輛動態實時調整,通過對比兩種制動系統的性能,驗證了所提出的轉彎制動系統提高了摩托車的制動性和方向穩定性.

圖13 基于固定滑移率的制動系統仿真
4 結論
摩托車是日常生活中常用的短途交通工具,但固有的不穩定性導致轉彎和制動過程中存在安全隱患.因此,對摩托車主動安全系統的研究具有重要的現實意義.通過分析摩托車輪胎模型特性確立了最佳滑移率決策模型,提出了基于模糊PID 的轉彎制動控制系統.通過Matlab 與BikeSim 聯合仿真驗證了控制系統的有效性,并與傳統ABS進行了對比研究,得到如下幾點主要結論.
1)分析了滑移率、側偏角、外傾角和垂直載荷對輪胎縱向與側向特性的影響.結果表明:通過調整滑移率可以同時控制縱向力與側向力,滑移率越靠近0,側向力越大;當滑移率為-0.15時,縱向力最大,側向力有所減小.確立滑移率作為轉彎制動控制系統的控制變量.
2)基于輪胎特性分析,借助高斯函數與線性函數確立了最佳滑移率決策模型,模型的輸入為車身側傾角與側傾角速度加權和,輸出為最佳滑移率.由此實現最佳滑移率隨著摩托車運動參數的變化而調整,是兼顧制動性能和車輛穩定性的最優解.
3)提出基于模糊PID 的轉彎制動系統,該系統由最佳滑移率決策模型和模糊PID 控制器組成.最佳滑移率決策模型根據車輛運動參數及時調整最佳滑移率并輸入至模糊PID 控制器,控制器產生控制力矩作用于輪胎,以控制滑移率,進而控制車輛動態,車輛動態再反饋至制動系統形成閉環控制.Matlab與BikeSim 聯合仿真結果表明:所提出的轉彎制動系統能合理調整最佳滑移率,車速在3.5 s內從80 km·h-1降為0 km·h-1,而且輪胎側偏角不超過2°,沒有發生側滑,制動系統具有良好的制動性和方向穩定性.
轉彎制動系統需要車速、側傾角和側傾角速度,然而目前的傳感器很難直接準確測量以上參數,可通過慣性測量單元得到的運動學參數進行狀態估測,從而獲得制動系統所需的車速、側傾角等信息.未來將開展車速和車身側傾角估測方面的研究.
[責任編輯 郭 涓]
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19