多約束條件下戰斗機三維路徑規劃問題
2024-01-18 00:00:00楊平肖兵陳新唐璐琪
系統工程與電子技術 2024年12期
關鍵詞:路徑規劃;多約束條件;粒子群優化算法;聚合適應度函數;威脅源;極限曲率矩陣
中圖分類號:N37 文獻標志碼:A DOI:10.12305/j.issn.1001-506X.2024.12.30
0引言
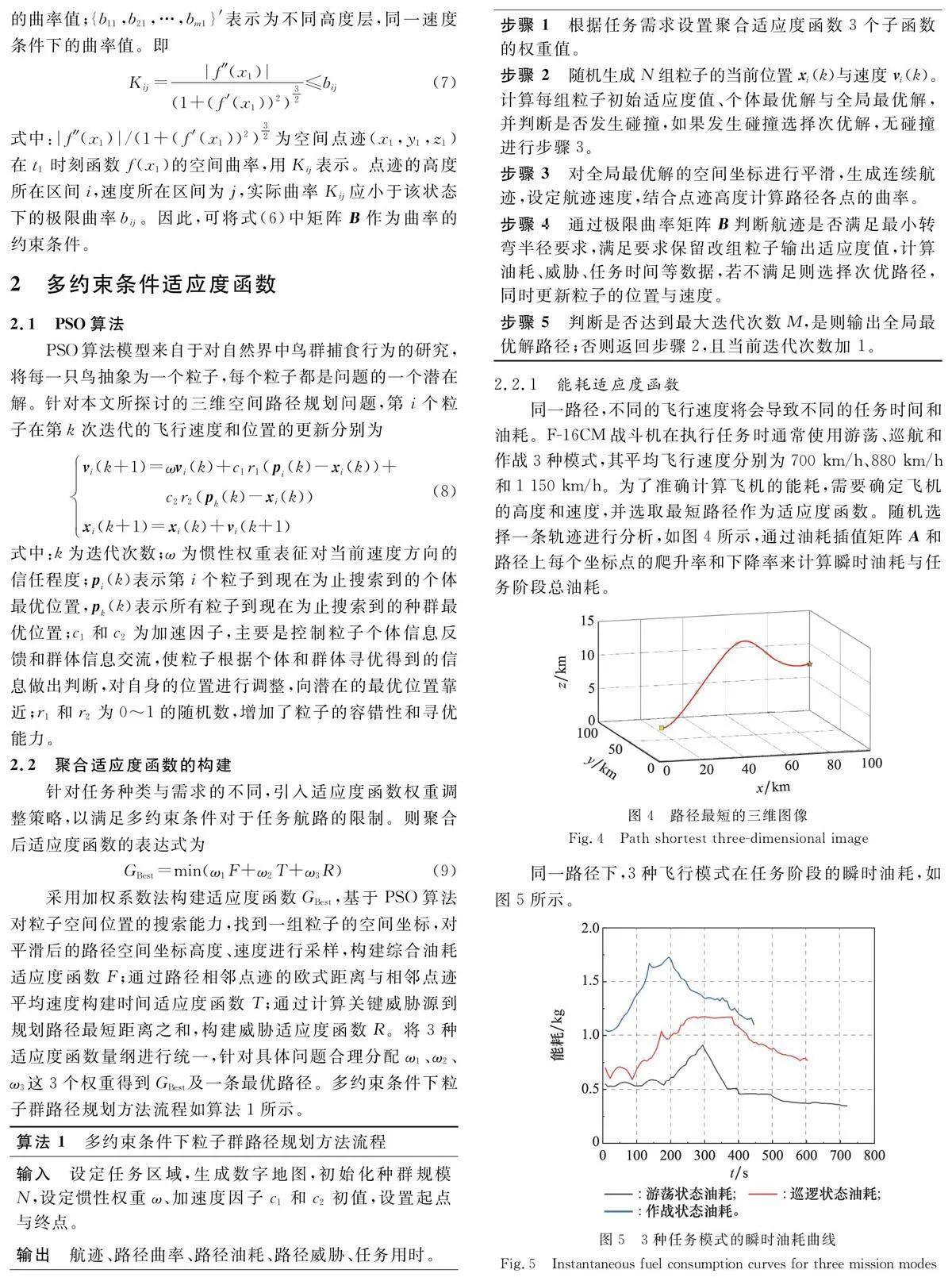
隨著智能研究在軍事領域的不斷深化,戰斗機的路徑規劃問題得到世界各國軍事領域的廣泛關注[13]。主要的路徑規劃算法大致可分為4 類:基于多項式的數學優化算法、基于幾何模型的搜索算法(快速擴展隨機數、模擬退火算法[45]、A等)、基于生物智能的算法(粒子群優化(particleswarmoptimization,PSO)算法、蟻群算法、細菌覓食算法、遺傳算法等)和人工勢場法[67]。除此之外,還有基于人工神經網絡和深度學習的路徑規劃方法[89],這些方法可以更加智能化和靈活化地規劃路徑,提高路徑規劃的效率和準確性。
真實場景中,路徑規劃會受到多種限制因素的影響,包括地形碰撞約束、油耗約束、多種雷達威脅約束、載機最小轉彎半徑等。考慮如何根據任務要求,從起點到達指定區域,規劃一條更為優質的任務路徑是具有實際意義的。在約束條件較少時,大部分算法都能給出最優路徑。然而,計算能耗、任務用時以及實際路徑的轉彎半徑等方面需要結合路徑各點的空間坐標與飛行速度進行考慮。PSO算法對于空間坐標具有良好感知能力,且具有參數少、收斂速度快、實現簡單等優點。因此,在解決三維路徑規劃問題下的多約束條件時,PSO算法具有其獨特的優勢。
由于多種約束條件對路徑的影響存在差異,因此尋找最佳路徑是一個多目標非確定性問題,
例如,Moktader 等人[10] 提出一種動態鄰域PSO(dynamicneighborhood-PSO,n-PSO)算法,在三維環境中進行仿真并與廣泛使用的PSO 進行比較,該算法初始粒子更具多樣性,有助于提升路徑質量,并提出路徑規劃算法的時間成本分析。Abhishek等人[11]提出和諧搜索法、PSO 與遺傳算法集合的混合算法。付興武等人[12]提出一種結合天牛須搜索(beetleantennaesearch,BAS)算法的改進PSO,有效地避免了一些缺點。在能耗問題方面,董校成等人[13]改進PSO 算法實現了水下無人航行器(underwaterunmannedaerialvehicle,UUA)的能耗與任務時間的平衡。Garrido等人[14]提出快速行進方程(fastmarchingsquare,FM2)方法來適應戰斗機的機動性能需求。De-Lima 等人[15]針對無人集群在三角形隊形情況下的路徑規劃問題,提出一種路徑規劃數學建模方法,并基于PSO、差分進化等算法的仿真驗證了該數學模型的可行性。Shao等人[16]提出一種基于粒子群的多約束條件下的路徑規劃方法,有效克服了一些其他算法的缺點。
在學術研究和實踐應用中,路徑規劃仍然存在一些亟待解決的問題。首先,當前大多數路徑規劃所采用的數字地圖模型相對簡單,無法充分反映雷達威脅源與實際情況之間的差異,因此給出的模型適用性并不強;其次,多約束條件下的路徑規劃是一個復雜的多目標優化問題,其中避障、路徑長度、任務時間、能耗等目標之間存在著復雜的非線性關系,需要建立更為合理的方法來處理這個問題;最后,在載機最小轉彎半徑與能耗的確定上,當前的規劃方案沒有考慮飛行速度和高度的影響。
針對以上問題,本文提出一種基于PSO 算法的全局路徑規劃方法。該方法首先構建更為真實和準確的數字地圖模型,同時將防御型雷達和地空導彈模型綜合到地形碰撞約束中,以提高路徑規劃的適用性;其次,根據F-16CM型戰機的性能參數,構建瞬時油耗插值矩陣及路徑極限曲率插值矩陣,并將其作為相應的能耗與最小轉彎半徑約束條件;然后,以距離關鍵威脅源歐式距離之和作為威脅源約束構建適應度函數。最后,將各約束條件的適應度函數進行統一,并引入適當的約束條件權重調整策略來得到多目標聚合適應度函數,以迭代出最優路徑及任務油耗、任務完成時間、最佳飛行速度等數據。通過充分利用PSO 算法在空間坐標方面的優化能力,本方法能夠為實現更為真實和合理的優化路徑提供可靠的支持。
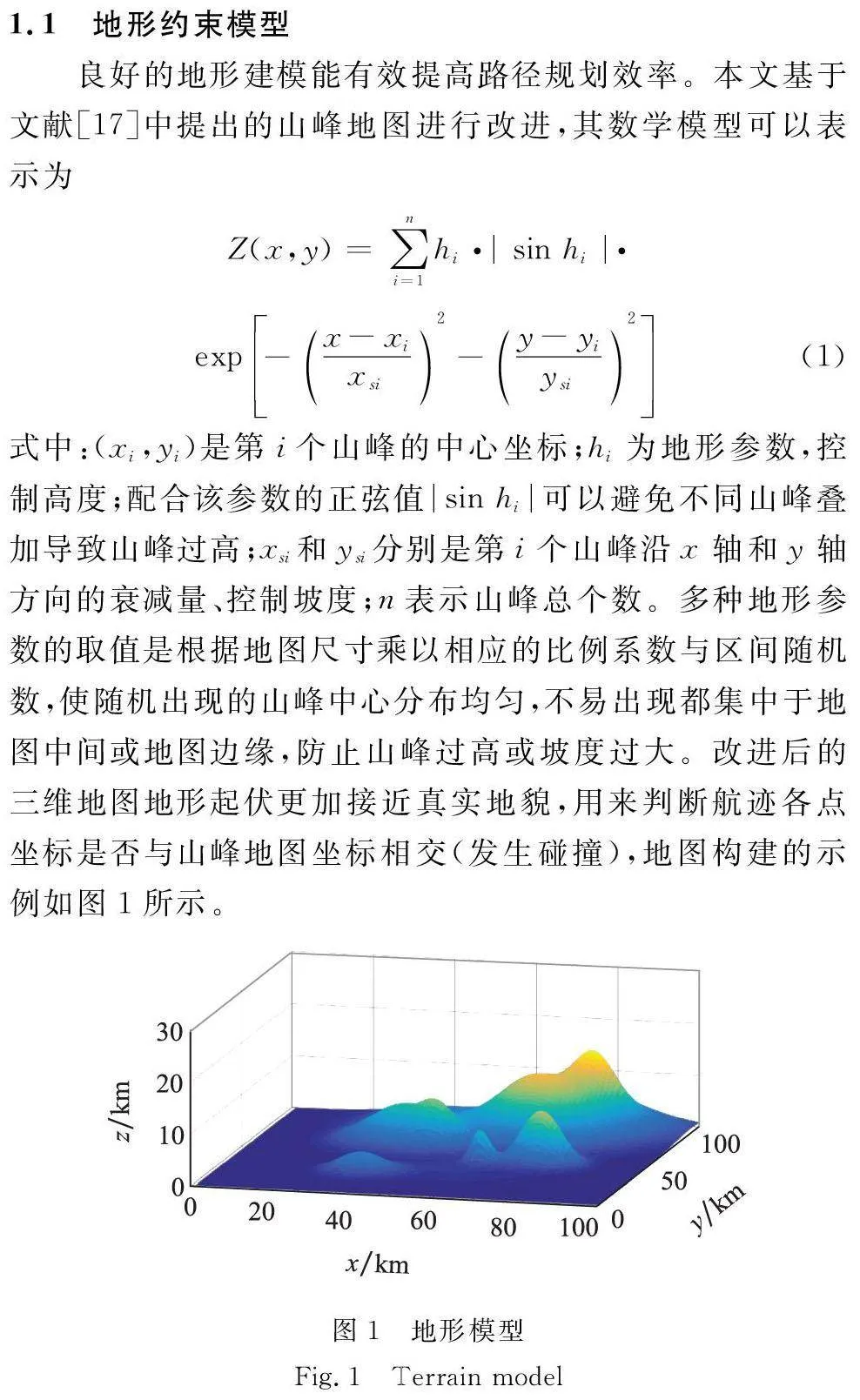
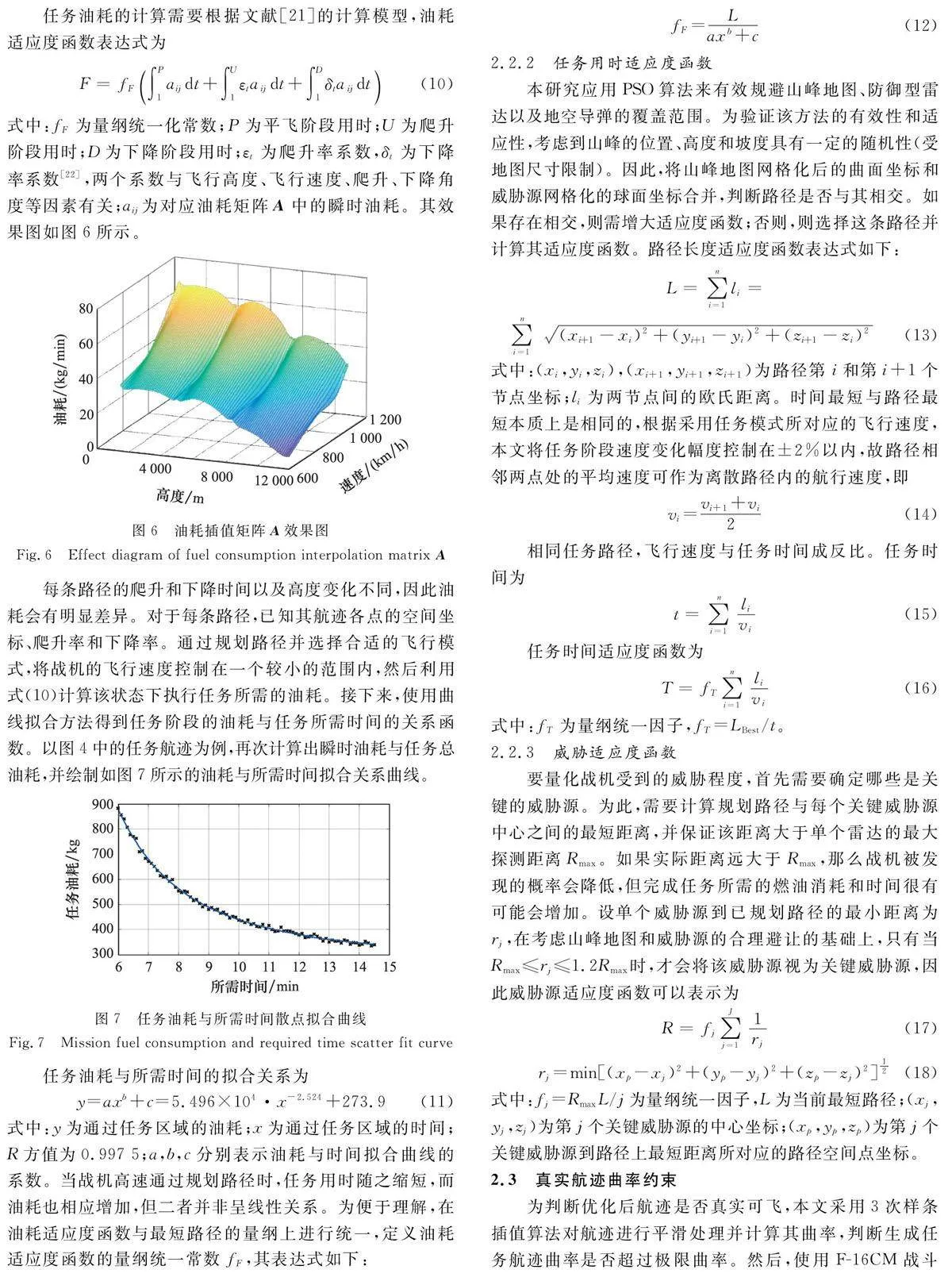
1航跡規劃約束條件
為保證能夠得到更優質的任務路徑,需要同時考慮飛行器自身性能、地形、威脅源分布、任務時間等約束條件。因此,需要將上述約束條件模型化。
1.2威脅源約束模型
戰斗機受到的威脅通常可分為兩類,一類是來自防空導彈的威脅,另一類是布設在海拔位置較高處的防御型雷達(包括警戒雷達、火控雷達)威脅。因此,需要對兩類威脅源進行合理的避讓。
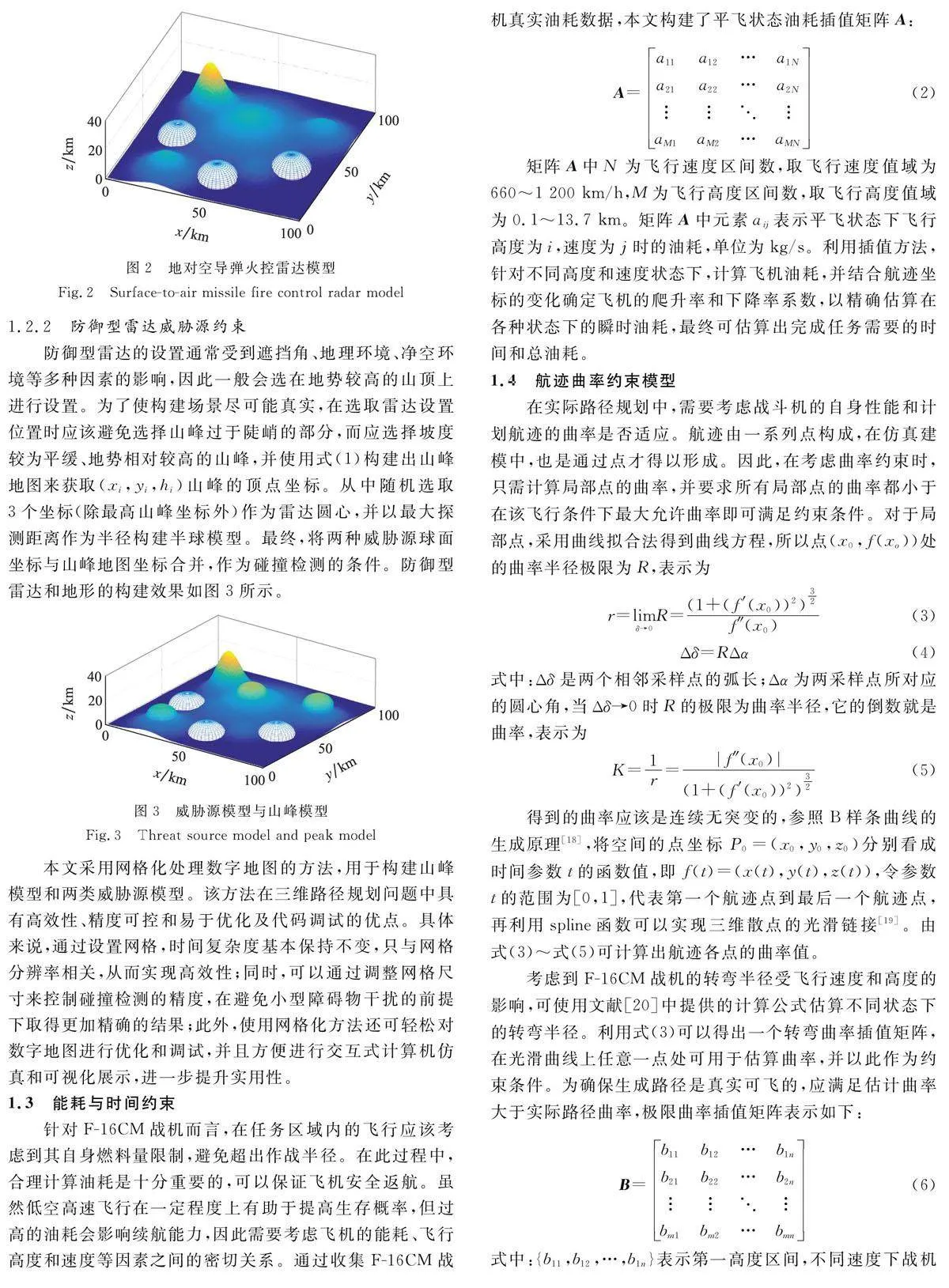
1.2.1地空導彈威脅源約束
構建防空導彈威脅模型的過程,主要基于導彈在不同高度和速度下的有效射程以及戰場地形環境。地形對導彈發射和控制都有很大的影響,例如在平原、山區等不同地形中部署、控制和指揮都會存在著相應的不同情況。因此,在選擇具體的部署位置時需要綜合考慮地形等多種因素,尋找相對平穩且視野較好的區域進行布設。防空導彈打擊范圍可近似為一個半球體,球的半徑為導彈的有效射程。本文選用隨機生成的數字地圖,并通過手動添加球心點坐標來構建防空導彈威脅模型。為了使試驗結果更加真實可靠,選擇相距較遠山峰的中間地帶作為點的位置,同時保證該區域地形較為平緩,示意圖如圖2所示。
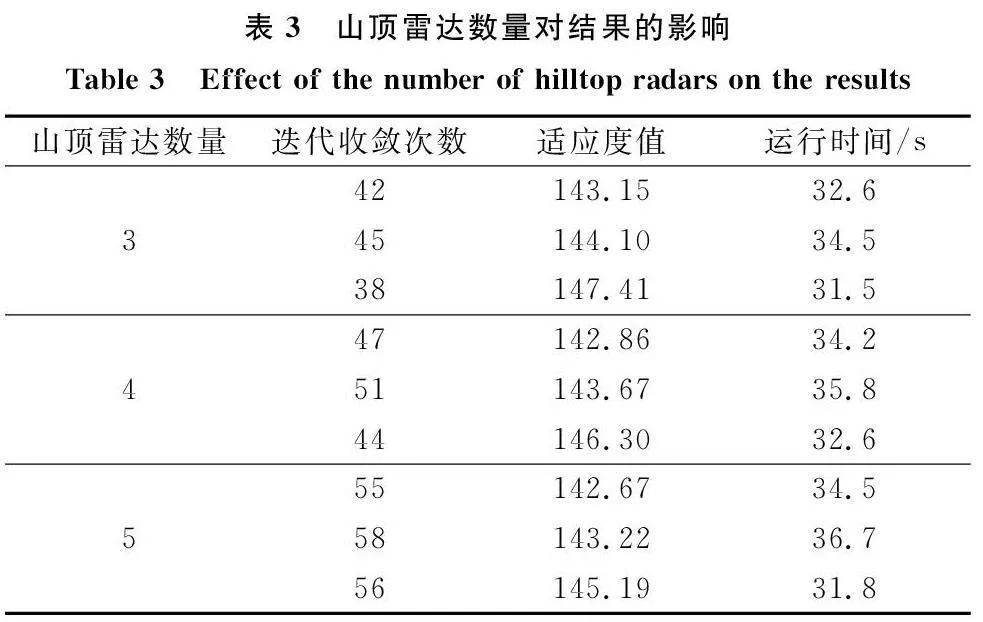
如表3所示,在山峰數量為10的前提下,迭代收斂次數隨著山頂雷達數量的增加而增加,但適應度值與山頂雷達數量并沒有明顯的線性關系,僅與隨機出現的山峰和雷達的空間位置有關。程序運行時間與迭代收斂次數之間也沒有明顯的線性關系,但與適應度值呈負相關。相同數量的山頂雷達存在位置差異較大的情況,可能導致不同迭代收斂次數。
4結束語
本文針對戰斗機的三維路徑規劃問題,提出一種基于PSO算法的全局路徑規劃方法,該方法考慮了多種約束條件。參考F-16CM 型戰機的性能參數,構建戰機的能耗模型、任務用時模型、山峰、威脅源等障礙物的模型,以及檢驗生成路徑可飛性的極限曲率矩陣。將路徑規劃問題轉化為一個具有多個約束條件的優化問題,并重新定義聚合適應度函數,在PSO群算法中考慮這些約束條件。
根據不同約束條件采用不同權重分配方案來優化路徑規劃質量,并通過實驗結果分析發現,路徑規劃質量與聚合適應度函數中各約束條件子函數及其權重分配密切相關。還進行了隨機地圖模型和不同威脅源數量的仿真實驗,并取得良好的實驗效果。這表明本文所提出的路徑規劃方法具有普適性和實際應用價值,能夠滿足實際任務需求并保證生成路徑的真實可飛行性。
未來可以在以下方面對路徑規劃方法進行改進:① 目前的路徑規劃方法主要處理靜態環境下的問題,未來應將其擴展至動態環境,考慮飛機與其他運動物體的交互影響,以實現更智能的路徑規劃;② 可以研究將機器學習技術應用于路徑規劃中,通過學習大量歷史路徑數據和飛行經驗,提升路徑規劃算法的智能性和適應性;③ 進一步與實際飛行環境進行結合,借助虛擬仿真技術,通過真實飛行數據驗證路徑規劃算法的可行性和有效性。
作者簡介
楊平(1985—),男,工程師,博士研究生,主要研究方向為機載空地制導武器的數據挖掘與實際應用。肖 兵(1966—),女,教授,博士,主要研究方向為復雜系統分析與評估。
陳 新(1982—),男,教授,博士,主要研究方向為云計算智能博弈、協同智能處理。
唐璐琪(1987—),男,工程師,主要研究方向為機載武器實際應用與管理。
