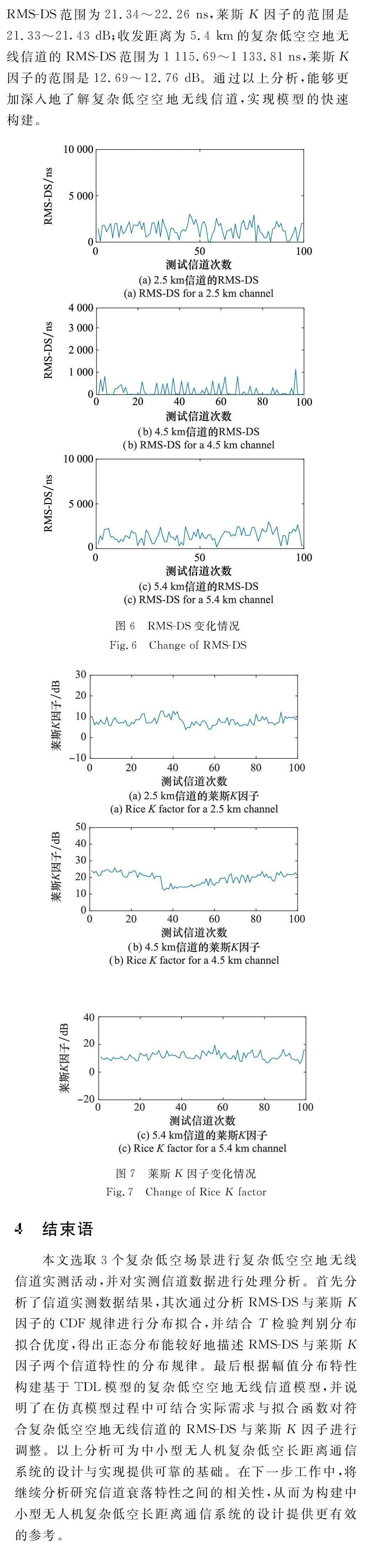
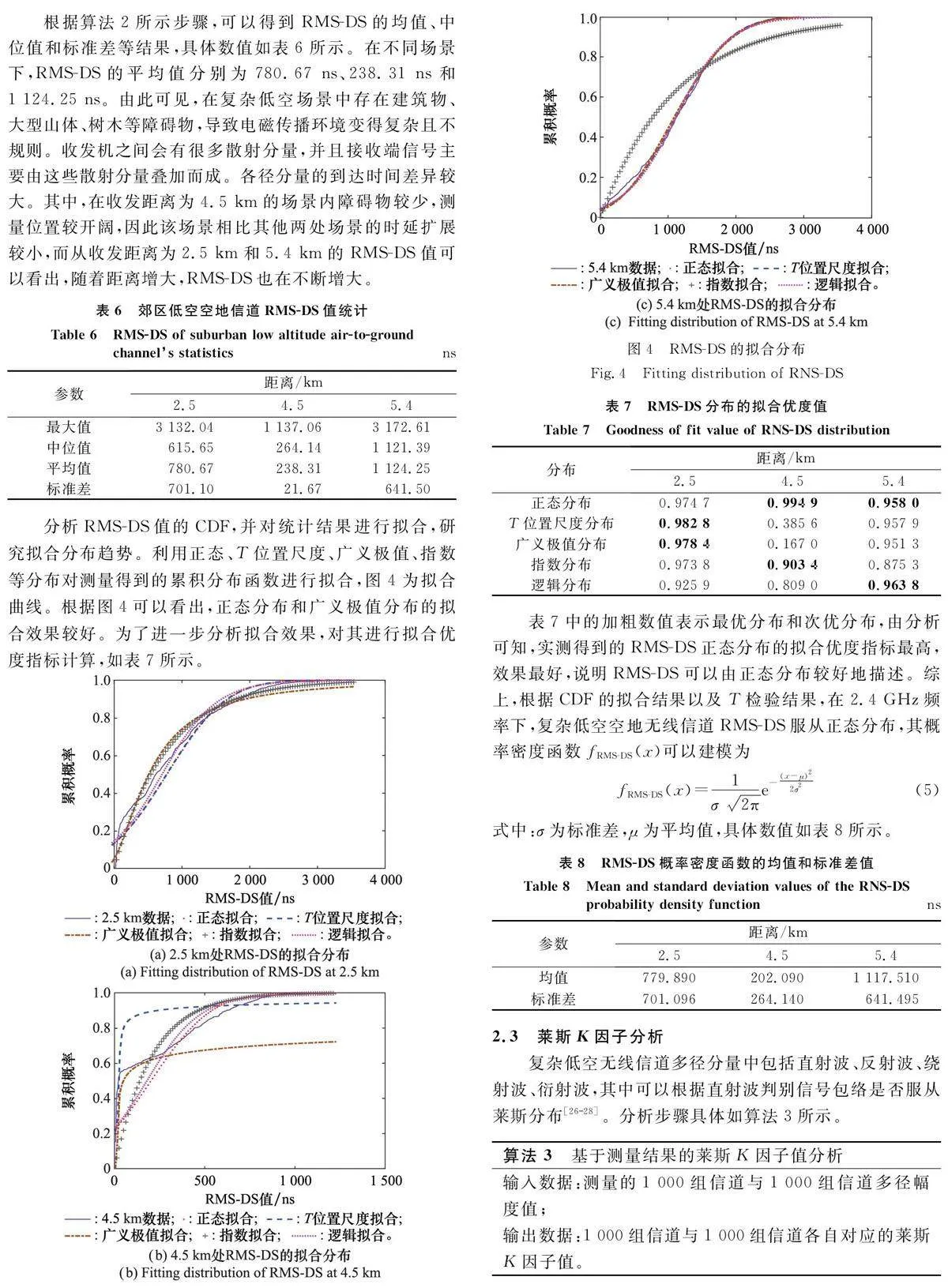
復雜低空空地無線信道測量與分析
2024-01-18 00:00:00于坤燦向新董鵬宇王鵬
系統工程與電子技術 2024年12期
關鍵詞:信道測量;復雜低空;均方根時延擴展;萊斯犓因子
中圖分類號:TN929.5 文獻標志碼:A DOI:10.12305/j.issn.1001-506X.2024.12.33
0引言
中小型無人機具有體積小、隱蔽性強、操作簡單、效費比高等特點[1],被廣泛應用于各個領域。在交通執法過程中,中小型無人機通過系統管控平臺實現自動懸停變焦,拍照取證處理違章、違法行為[2];在戰爭中,中小型無人機攜帶多種傳感器和通信設備,在目標信息提供和制導服務等方面發揮了顯著效果,中小型無人機低空通信在民用和軍事領域起到了至關重要的作用[3]。不同于高空通信場景[4],低空通信具有距離地面較近,附近山丘、地形凸起,建筑物以及樹木反射體、障礙物多等特點[5],導致視距鏈路衰減,反射體增加,多徑效應明顯,低空空地信道特性更加復雜多變。因此,在構建復雜低空空地無線信道模型時,分析時延擴展和萊斯犓因子等信道特性是至關重要的。對這些特性的準確把握是提高中小型無人機在復雜低空長距離通信方面可靠性的關鍵環節。
近年來,通過信道實測研究低空空地無線信道特性成為業內關注的熱點[615]。美國國家航空航天局[68]基于L波段和C波段對海域、郊區、丘陵、山脈、城市5種場景進行了多次實地低空信道測量活動,并對多徑分量、時延擴展等信道特性進行分析,發現信道的散射多徑分量在低空場景下存在隨機性和明顯間歇性。文獻[9 10]在由中低高度的建筑、開闊的草地、樹木、道路和湖泊組成的郊區場景下,選取水平距離為100~500 m 的位置,使用中小型無人機進行了低空空地信道測量,并根據測量結果分析了信道均方根時延擴展(root meansquaredelayspread,RMS-DS)、萊斯犓因子等信道特性。文獻[11]分別在地形平坦和單層住宅組成的城市場景以及僅有小于2 m 的高灌木、樹葉和山體組成的郊區場景下,進行水平距離175~180m的低空無人機無線信道測量活動,并基于測量數據分析了信道多徑小尺度衰落特性。文獻[12 13]對只有高度為15m的建筑物遮擋的開闊半城市場景下,選取水平距離350m 位置,分別進行了1GHz、4GHz、12GHz、24GHz4 種頻率的空地信道測量,并基于信道測量數據結果進行了經驗建模,分析了該信道的路徑損耗、陰影衰落、小尺度衰落,提出了一種新的陰影衰落自相關模型,并發現對數邏輯分布是最適合用來描述小尺度衰落的分布。文獻[14]在3.9GHz頻率下選取水平距離為85 m,場景特點為開放、建筑密度低、高度低的郊區場景進行了信道測量,分析了信道的路徑損耗、RMS-DS、多徑數量受周圍環境的影響等特性。文獻[15]設計了一款可供無人機攜帶的簡易軟件無線電平臺探測儀,由無人機實現信號的發射,地面進行接收的形式為在1.2~6GHz頻率下選取水平距離500m,對場景由大量的樹木、草坪和建筑物組成的信道進行測量,并根據實測信道數據提取原始的沖激響應,重構出更加實用的信道沖激響應,對信道測量的路徑損耗、信道延遲等參數進行了驗證。文獻[16]對地下空間隧道和房柱場景這種特殊的無線通信場景進行水平距離為200 m 的信道測量與建模,并通過最小均方誤差準則進行模型驗證,發現相對于3.5GHz頻段的信道,2.5GHz頻段信道的RMS-DS更大。相對于地下房柱場景,隧道場景的多普勒功率譜更加集中,且有明顯峰值出現。文獻[17 19]基于L波段和C波段對海域、郊區、丘陵、山脈、城市5種場景進行多次實地低空信道測量,并根據信道測量的數據對低空信道的多徑分量、時延擴展等信道參數進行分析,發現信道的散射多徑分量在低空場景下存在隨機性和明顯間歇性。
綜上所述,目前低空無線信道測量選取的水平距離均不超過500m,場景相對較為寬闊且障礙物較少。然而,在由高山、中低層建筑、非開闊樹木和道路等復雜障礙物組成的低空場景下[20],對大于500 m 水平長距離的低空空地無線信道的測量分析研究尚未被發現。因此,本文在無線電頻率劃分規定下選擇了3種場景(即水平距離分別為2.5km、4.5km 和5.4km),并在2.4GHz頻率下進行了實際信道測試活動,以獲取信號幅度分布情況及多徑個數與比例分布情況,基于信道數據研究分析了RMS-DS和萊斯犓因子的累積分布函數擬合情況。同時,基于抽頭延時線(tappeddelayline,TDL)模型與實際測試數據構建出復雜低空空地無線信道模型,并提供仿真建模時調整信號參數的方法。該項工作可為提升中小型無人機在復雜低空場景中的通信性能奠定堅實基礎。
1復雜低空無線信道實測
1.1測量系統及方法
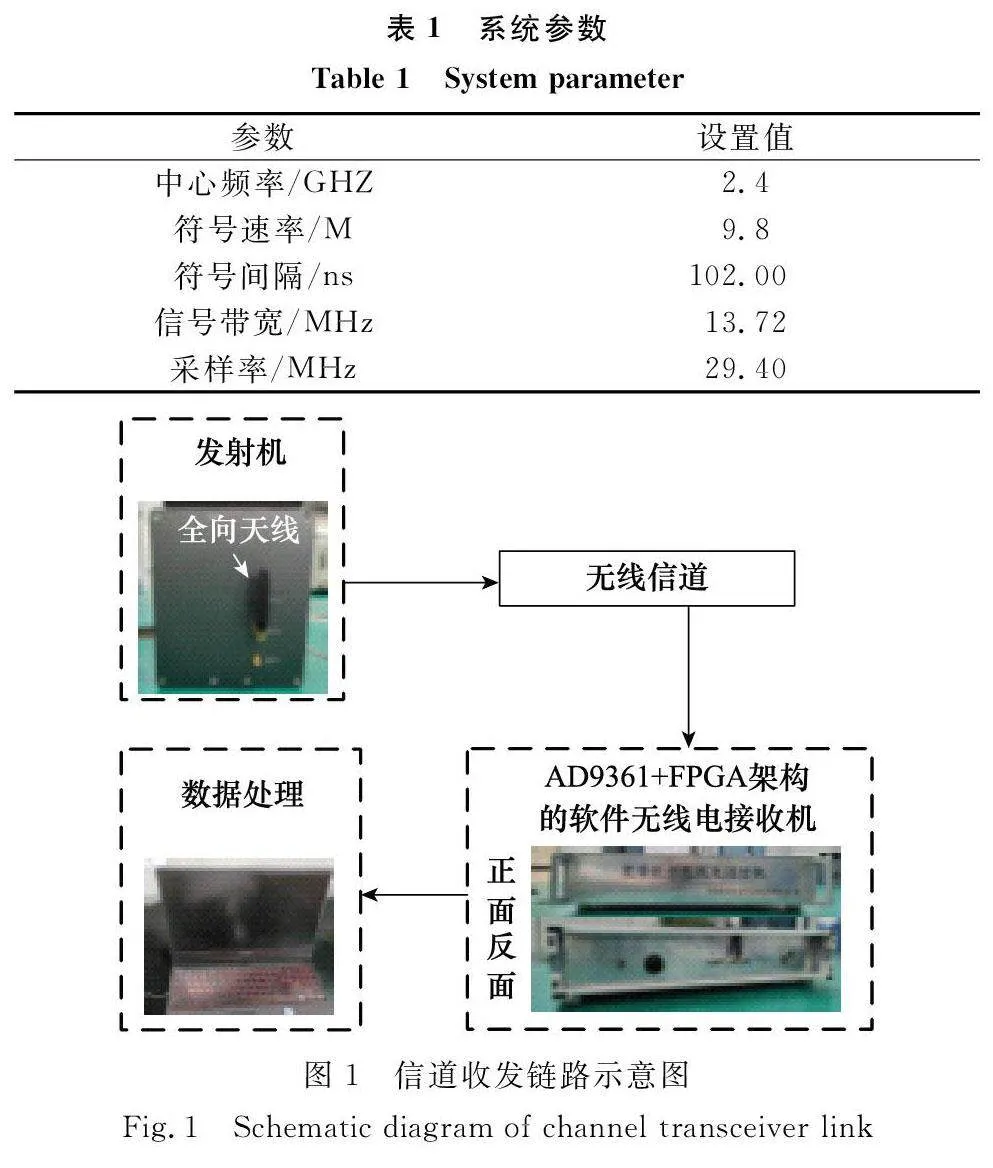
本文采用基于軟件無線電的收發機,并通過滑動相關法進行信道估計,完成信道測量。系統參數如表1所示,信道收發鏈路示意圖如圖1 所示,其中接收機是AD9361 和現場可編程門陣列(fieldprogrammablegatearray,FPGA)架構的軟件無線電接收機。發射端對已知偽噪聲(pseudonoise,PN)序列進行正交相移鍵控(quadraturephaseshiftkeying,QPSK)調制并由天線發送,通過網線直接將AD9361輸出的下變頻數據保存到上位機,之后由軟件接收程序進行處理。接收端完成匹配濾波與同步,并與本地PN 序列進行滑動相關來估計信道的沖激響應。
1.2測量場景描述
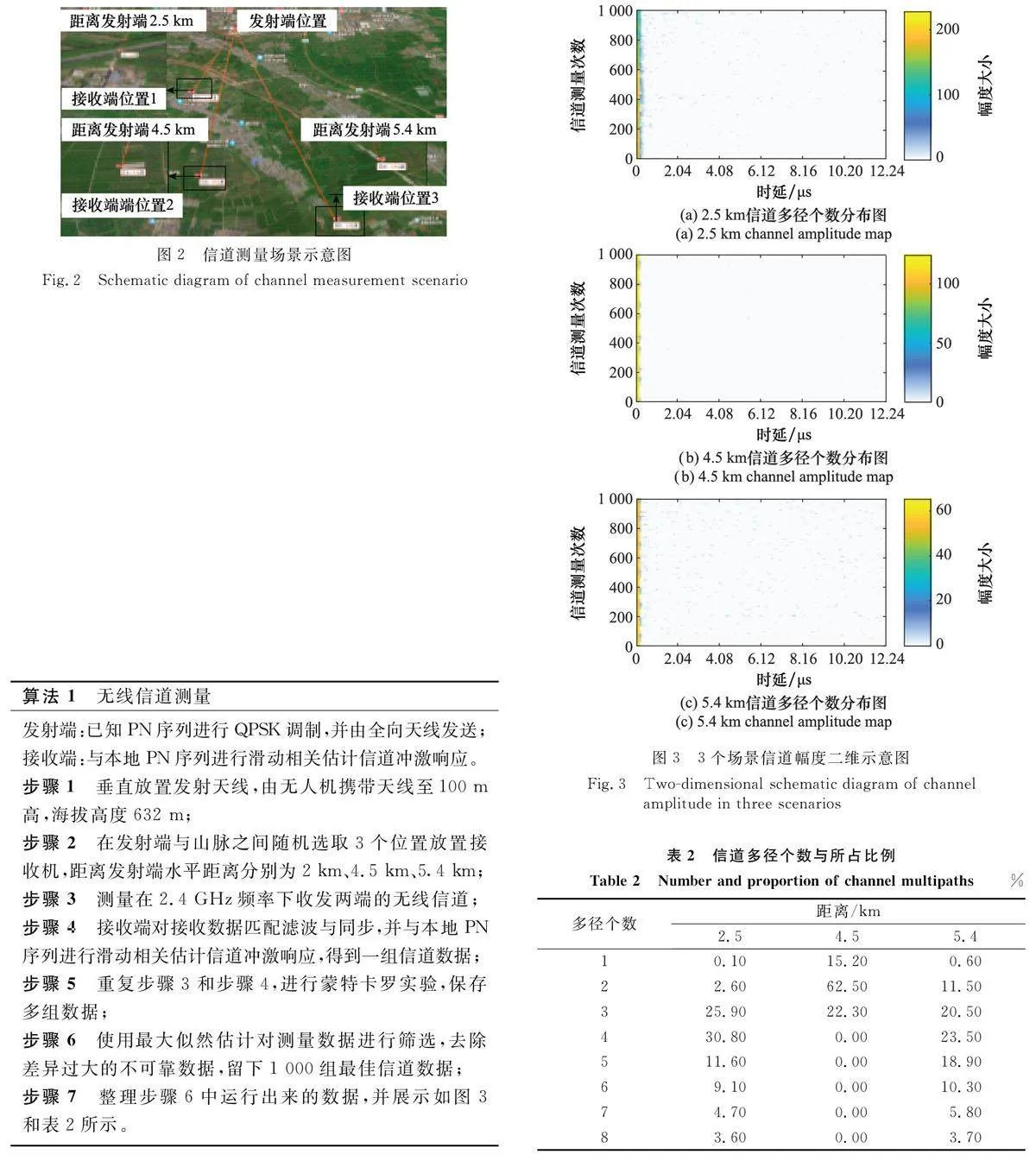
實測活動在一郊區靠近山體區域進行,測量場景如圖2所示。直線距離為20km,有麥田、居民區和來往車輛的公路,其中山脈是最大的反射體,其余障礙物為不同的散反射體,本文選用的低空測試場景具有復雜性和代表性。在測試過程中,使用無人機搭載發射天線,將上升到離地面100m高度的低空空域作為發射端搭載平臺,海拔632 m,并使用AD9361+FPGA 架構的軟件無線電作為接收端搭載平臺,采用全向天線進行信道實地測量。本文選取了水平距離分別為2.5km、4.5km、5.4km 的3個場景進行分析。其中2.5km 處的接收機前方有矮樹木遮擋,背后距墻1.5m,且靠近村落,海拔443m,信號散反射主要受到矮樹木、建筑物和山脈的影響。收發高度差為189m。4.5km 處的接收機位于非常空曠的麥田中,海拔549 m,信號散反射主要受山脈、建筑物的影響,視距無遮擋,收發高度差為83m。5.4km處的接收機位于一村莊附近,海拔為465m,信號散反射主要受到山脈、周圍麥田、建筑物和行駛在公路上的車輛等因素影響,視距在一定程度上受到樹木遮擋,收發高度差為167m。
1.3測量結果分析
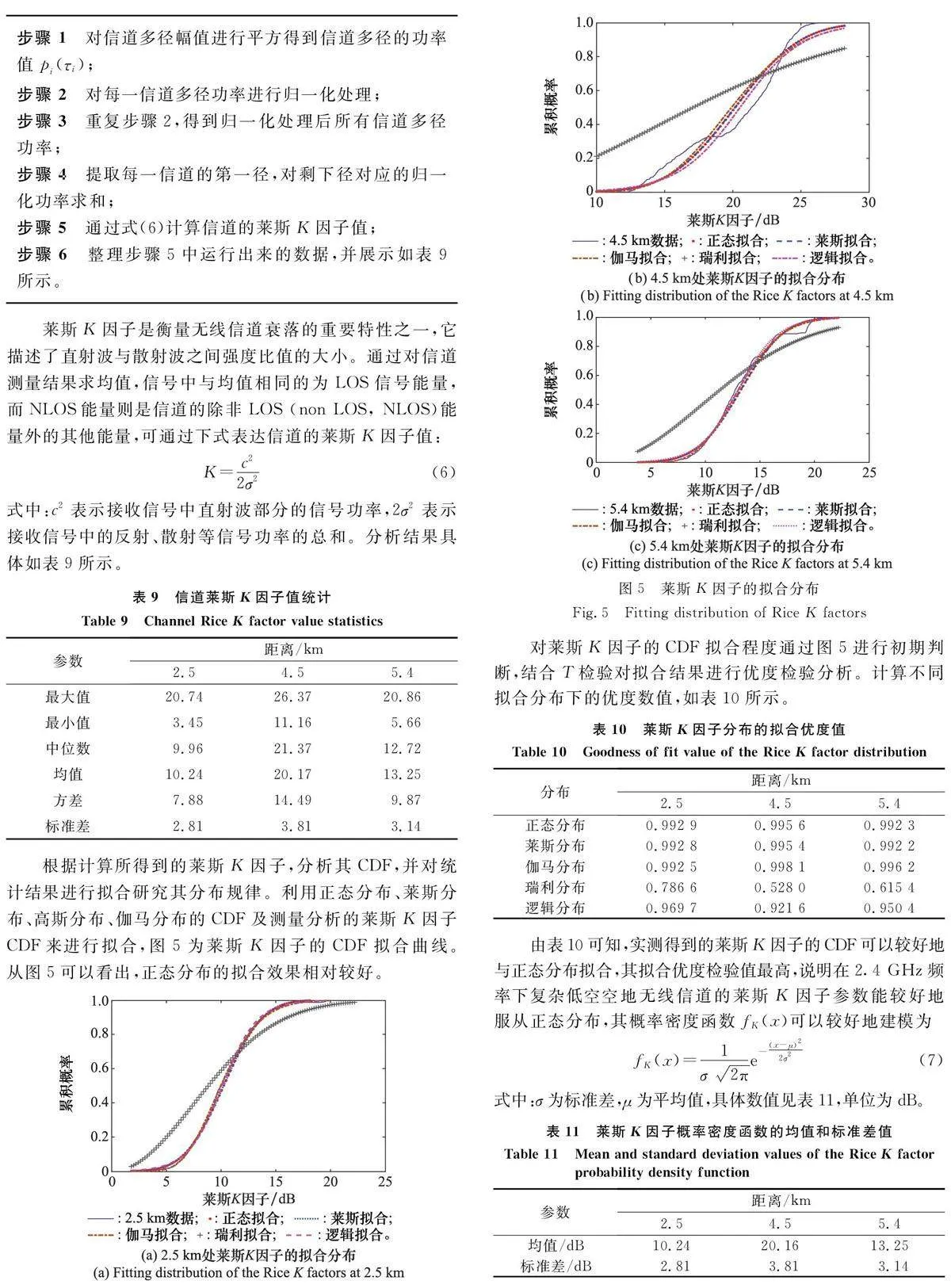
在3個場景下,根據算法1實測步驟分別獲得1000組信道測量數據,并對信道數據進行處理分析。通過此過程,得到了3種場景的信道幅度顏色圖,如圖3所示。其中,狓軸表示時延,狔軸表示信道測量次數,用顏色表示幅度的大小。從圖3中可以看出,在收發水平距離為2.5km 的低空空地無線信道中,存在較多的稀疏多徑現象,4徑出現的概率比其他徑高;而在收發水平距離為4.5km 的低空空地無線信道中,主要為2徑出現,其他徑出現概率較小;最后,在收發水平距離為5.4km 的低空空地無線信道中,多徑個數分布在3~6之間。進一步分析信道多徑比例,如算法1所示。
經過信道測量,統計了3 個場景下每次信道測量多徑個數的分布情況,并對可能出現的多徑個數進行比例計算。根據表2所示數據可知,在收發距離為2.5km 的低空空地無線信道中,多徑個數為4的概率最高,達到30.8%,主要多徑個數集中在3~5之間;而在收發距離為4.5km 的低空空地無線信道中,多徑個數以2 出現的概率最高,達到62.5%;在收發距離為5.4km 的低空空地無線信道中,多徑個數以4出現的概率最高,達到23.5%。
作者簡介
于坤燦(1997—),女,碩士研究生,主要研究方向為無線通信、航空通信。
向新(1974—),男,教授,博士,主要研究方向為無線電通信、機器學習、信號識別、信號處理。
董鵬宇(1995—),男,博士研究生,主要研究方向為無線信號處理識別。
王鵬(1996—),男,博士研究生,主要研究方向為無線信號處理識別。
