基于雙目視覺的農(nóng)藥噴灑機器人識別系統(tǒng)
2024-01-20 11:13:14蒲燁鋒李心怡
農(nóng)業(yè)工程 2023年10期
張 謀, 蒲燁鋒, 江 雯, 王 鵬, 李心怡
(1.北京航天長征飛行器研究所,北京 100076; 2.華中科技大學(xué)航空航天學(xué)院,湖北 武漢 430074)
0 引言
玉米作為我國主要糧食作物,其產(chǎn)量直接影響我國糧食安全[1]。玉米的病蟲害防治是生產(chǎn)過程中的關(guān)鍵環(huán)節(jié),而現(xiàn)有農(nóng)藥噴灑方式仍存在效率低、成本高、易浪費和易污染等缺陷。近年來,智能算法已廣泛應(yīng)用于各領(lǐng)域的識別檢測任務(wù)中,利用智能算法優(yōu)化玉米苗期農(nóng)藥噴灑過程,不僅能節(jié)約成本、提高農(nóng)藥利用率,還能進一步提高農(nóng)業(yè)智能化水平。
目前,國內(nèi)外研究人員將視覺算法應(yīng)用在農(nóng)作物的識別檢測領(lǐng)域[2-3]。早期的機器視覺方法主要基于圖像處理算法。MILLER B K 等[4]結(jié)合陰影矯正與紅外圖像,分割缺陷區(qū)域?qū)μ易臃诸悺ARKAR N 等[5]基于莖和花的末端視圖建立了一種番茄分類方法。WOEBBECKE D M 等[6]通過顏色指數(shù)分割圖像實現(xiàn)對雜草的識別。馬志艷等[7]基于HSV 空間分割玉米苗圖像,利用形態(tài)運算與骨架提取算法提取輪廓信息、確定莖稈坐標(biāo),實現(xiàn)識別定位。
隨著計算機算力提升,機器學(xué)習(xí)在圖像識別、文字處理、人機交互等領(lǐng)域發(fā)展迅速,支持向量機、貝葉斯算法、神經(jīng)網(wǎng)絡(luò)算法等智能算法也逐漸代替圖像處理手段應(yīng)用在農(nóng)業(yè)檢測中[3,8-10]。KURTULMUS F等[11]將機器視覺與支持向量機算法相結(jié)合檢測玉米穗。ROMUALDO L 等[12]利用貝葉斯算法檢測玉米葉片中氮營養(yǎng)狀況。LU H 等[13]將神經(jīng)網(wǎng)絡(luò)算法用于玉米穗的分割任務(wù)。MOHANTY S P 等[14]基于AlexNet 完成了對14 種農(nóng)作物和26 種病蟲害的識別診斷任務(wù)。張開興等[15]將圖像中的顏色與形狀特征作為BP 神經(jīng)網(wǎng)輸入,實現(xiàn)玉米葉病蟲害的識別。張偉榮等[16]將改進的Mask R-CNN 玉米苗冠層分割算法應(yīng)用在對靶施肥的任務(wù)中。遷移學(xué)習(xí)與數(shù)據(jù)增強也被證實在提高模型精度與魯棒性上具有良好效果。CONDORI R H M等[17]運用簡單的遷移學(xué)習(xí)方法,提高了對玉米葉片識別的成功率。陳桂芬等[18]結(jié)合遷移學(xué)習(xí)與數(shù)據(jù)增強兩種方法實現(xiàn)玉米病害識別。石新麗等[19]將二值化處理作為數(shù)據(jù)增強手段,利用YOLOv3 網(wǎng)絡(luò)鑒別玉米害蟲以提高識別準(zhǔn)確率。
綜合現(xiàn)有識別手段,本研究提出一種可搭載于農(nóng)藥噴灑機器人的視覺識別系統(tǒng),系統(tǒng)以ARM 集成板作為嵌入式硬件,雙目相機作為圖像采集設(shè)備,可對單株秧苗進行精確噴藥。
1 材料與方法
1.1 系統(tǒng)整體設(shè)計
視覺識別系統(tǒng)主要包括神經(jīng)網(wǎng)絡(luò)訓(xùn)練、識別測距程序集成和硬件集成。選擇“Raspberry Pi 4B”作為嵌入式集成板,植入雙目相機與識別測距程序,并將開發(fā)板固定在農(nóng)藥噴灑機器人上,利用上位機控制。搭建好的系統(tǒng)工作流程如圖1 所示,位于小車上的相機實時采集圖像信息,隨后將圖像傳至集成板處理,通過識別運算后輸出目標(biāo)分類、目標(biāo)置信度及目標(biāo)坐標(biāo),當(dāng)檢測到待噴藥玉米秧苗處于農(nóng)藥噴灑機器人噴灑范圍內(nèi)時,利用GPIO 模擬PWM 信號控制噴淋系統(tǒng),實現(xiàn)對單株秧苗精確噴藥。
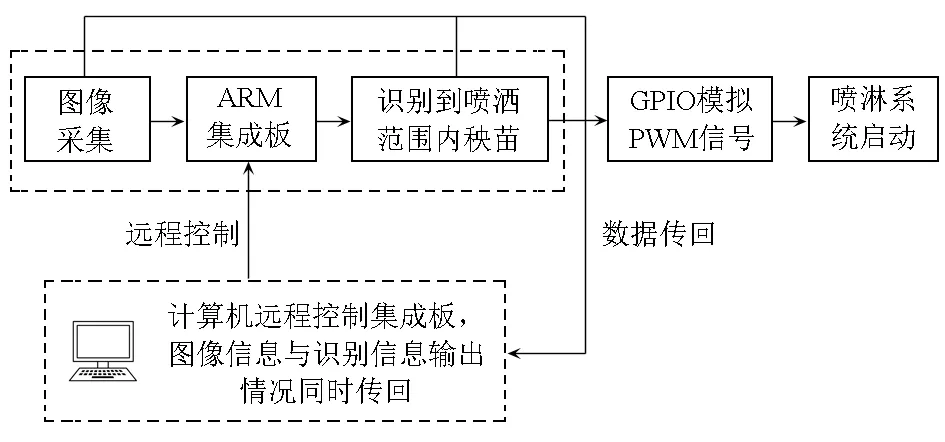
圖1 農(nóng)藥噴灑機器人視覺識別系統(tǒng)工作流程Fig.1 Workflow of visual identification system for pesticide spraying robot
1.2 SSD-MobileNetv1 網(wǎng)絡(luò)模型
SSD-MobileNetv1 神經(jīng)網(wǎng)絡(luò)模型是單階段目標(biāo)檢測算法SSD 與輕量級深度可分離卷積模型MobileNetv1的結(jié)合體。其中,SSD 算法是由LIU W 等[20]在2016年提出的一種基于回歸的單階段目標(biāo)檢測算法。該算法結(jié)合了YOLO 的回歸理念和Faster-RCNN 的錨定機制,在保證預(yù)測精度的同時也增加了運算速度。MobileNetv1 網(wǎng)絡(luò)(一種專為移動和嵌入式設(shè)備打造的輕量級網(wǎng)絡(luò))則采用深度可分卷積算法以進一步減少模型計算量[21]。
Google 團隊用MobileNetv1 替換SSD 網(wǎng)絡(luò)中的主干網(wǎng)絡(luò)VGG16,提出SSD-MobileNetv1 網(wǎng)絡(luò)模型。該網(wǎng)絡(luò)以MobileNetv1 為基礎(chǔ),并在Conv13 層后添加8個卷積塊,分別提取6 個不同尺度的特征圖,隨后利用錨定的思想生成眾多先驗框,分別進行類別與位置回歸,最后以非極大值抑制法得到圖片的目標(biāo)檢測結(jié)果。該網(wǎng)絡(luò)兼具SSD 與MobileNetv1 兩種網(wǎng)絡(luò)優(yōu)點,主要結(jié)構(gòu)如圖2 所示。
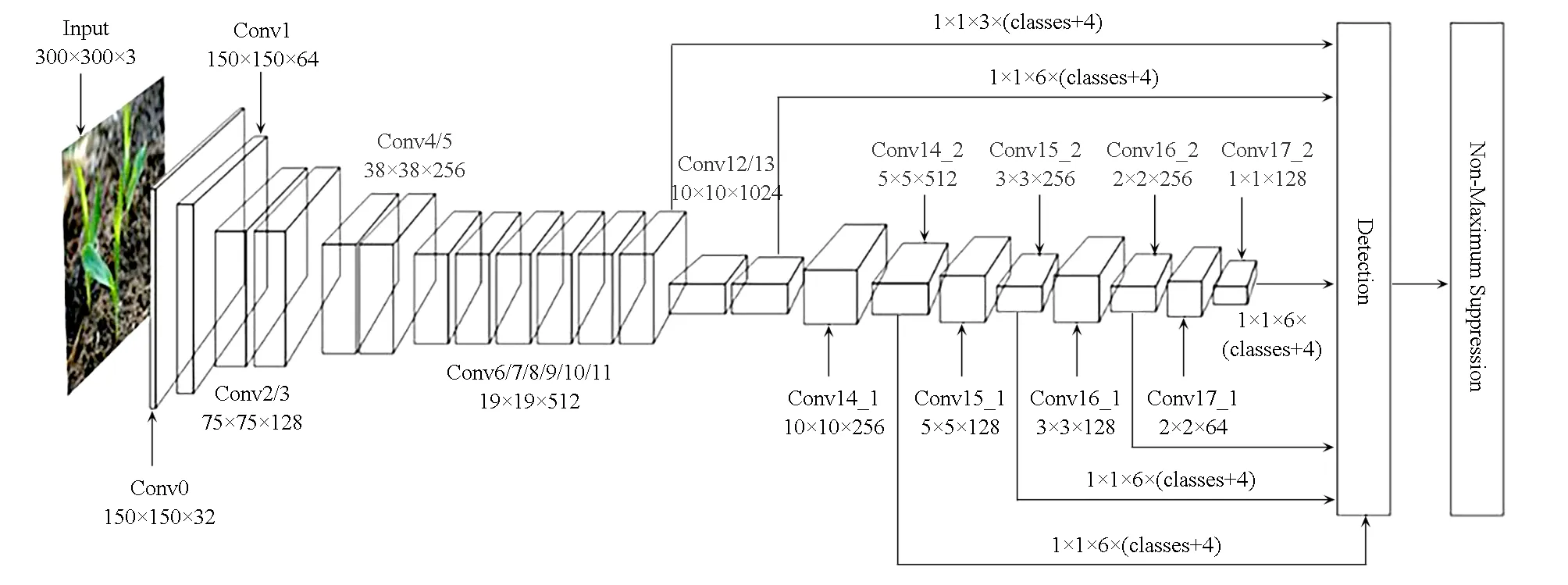
圖2 SSD-MobileNetv1 神經(jīng)網(wǎng)絡(luò)主要結(jié)構(gòu)Fig.2 Main structure of SSD-MobileNet neural network
1.3 雙目相機測距原理
雙目相機測距主要包括相機標(biāo)定、雙目校正、雙目匹配和計算深度信息4 個步驟[22]。對于已知相機參數(shù)且成像在同一平面上的雙目相機系統(tǒng),如圖3 所示,假定鏡頭焦距為f,相機光心分別為Oz1和Oz2,相機光心之間的距離為B,則空間內(nèi)一點p(x,y,z)在左右相機上成像點pl與pr的坐標(biāo)為
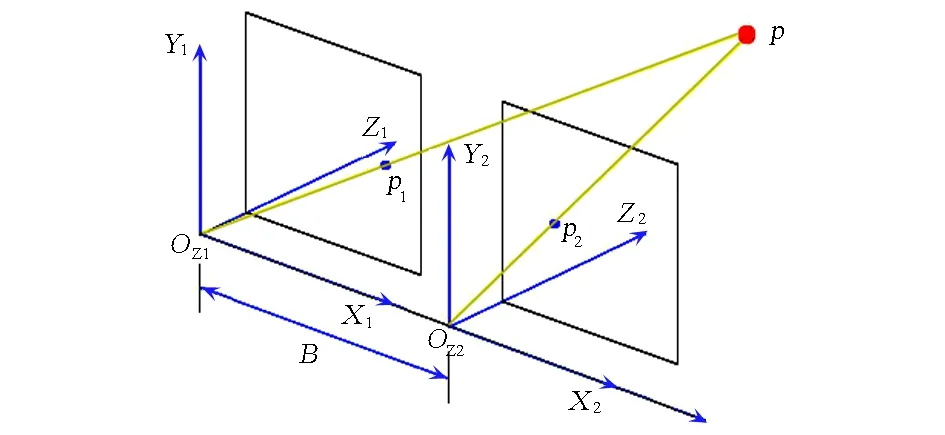
圖3 雙目相機光軸與成像平面Fig.3 Optical axis and imaging plane of binocular camera
1.4 識別與測距程序集成
1.4.1 圖像增強與數(shù)據(jù)集制作
在采集圖像時需根據(jù)農(nóng)藥噴灑機器人的實際應(yīng)用情況確定相機架設(shè)高度與偏向角度,固定相機焦距,并考慮光照與距離的影響。為增加圖像樣本多樣性,可在不同光線、不同距離下對玉米秧苗進行拍攝。模型訓(xùn)練效果通常與圖像樣本質(zhì)量、數(shù)量有關(guān),過少的樣本通常會導(dǎo)致模型陷入局部最優(yōu)解。為防止過擬合現(xiàn)象發(fā)生,還需對圖片數(shù)據(jù)集進行擴充。本研究利用OpenCV 軟件庫中的圖像處理函數(shù),隨機對圖像進行翻轉(zhuǎn)、剪裁、旋轉(zhuǎn)、增加噪聲和調(diào)整亮度等操作,將圖片數(shù)量擴充至原來的18 倍,如圖4 所示。擴充后的圖片按3∶1 的比例隨機分為訓(xùn)練集與測試集,利用LabelImg 圖像標(biāo)注工具,框選圖片中待識別的玉米秧苗,賦予標(biāo)簽,完成模型數(shù)據(jù)集的制作。
1.4.2 卷積神經(jīng)網(wǎng)絡(luò)訓(xùn)練
選擇開源的TensorFlow-object detection 框架,修改SSD-MobileNetv1 模型配置文件中的訓(xùn)練參數(shù)(設(shè)置初始學(xué)習(xí)率0.004,訓(xùn)練步數(shù)100 000 步、batch size 為8,衰減步數(shù)和衰減系數(shù)分別為100 和0.95)。為獲得更好的訓(xùn)練效果,加載預(yù)訓(xùn)練模型參數(shù)作為初始化參數(shù)進行訓(xùn)練。訓(xùn)練運行環(huán)境:基于Python3 編程語言的TensorFlow1.15 深度學(xué)習(xí)框架, 操作系統(tǒng)為Windows10-64 位專業(yè)版,CPU 為Intel(R) Core(TM)i5-3 470,GPU 為NVIDIA GTX1060Ti,基礎(chǔ)環(huán)境配置為Anaconda3、PyCharm2020。
為方便模型的調(diào)用與集成,使用OpenCV 深度神經(jīng)網(wǎng)絡(luò)模塊,將TensorFlow 訓(xùn)練生成的pb 模型文件轉(zhuǎn)換為OpenCV 軟件庫可讀取的文件格式,即在程序中可使用readNetFromTensorFlow 函數(shù)直接讀取模型文件。
1.4.3 雙目相機標(biāo)定
為了矯正由于鏡片透視失真造成的圖片變形,在獲取圖像中的三維信息時,需通過標(biāo)定確定兩臺相機之間的位置參數(shù)與畸變系數(shù)。選取市場上較便宜且質(zhì)量較輕的DS-3DW300 雙目攝像頭模組作為圖像采集設(shè)備。按照張正友標(biāo)定法準(zhǔn)備棋盤格標(biāo)定板,固定攝像頭位置,運行圖像采集程序,本例共收集左右攝像頭拍攝的標(biāo)定照片49 張。借助MATLAB 標(biāo)定工具箱完成相機標(biāo)定計算,得到相機參數(shù)如表1 所示。

表1 雙目相機參數(shù)標(biāo)定結(jié)果Tab.1 Internal calibration results of binocular camera
1.4.4 識別測距與噴藥程序
基于OpenCV 軟件庫提供的雙目矯正與立體匹配相關(guān)算法,首先利用標(biāo)定所得相機參數(shù)對圖像進行校正,隨后采用半全局匹配(SGBM)算法生成視差圖,根據(jù)視差圖中的信息計算得出每個像素點的三維坐標(biāo)。如圖5 所示,實時檢測與噴藥程序主要流程為初始化GPIO 模塊、加載模型文件、讀取左右目相機視頻流、矯正每幀圖像后匹配生成深度圖、識別圖像中玉米秧苗、輸出玉米秧苗坐標(biāo)與識別率及GPIO 模擬PWM 信號啟動噴淋系統(tǒng)。
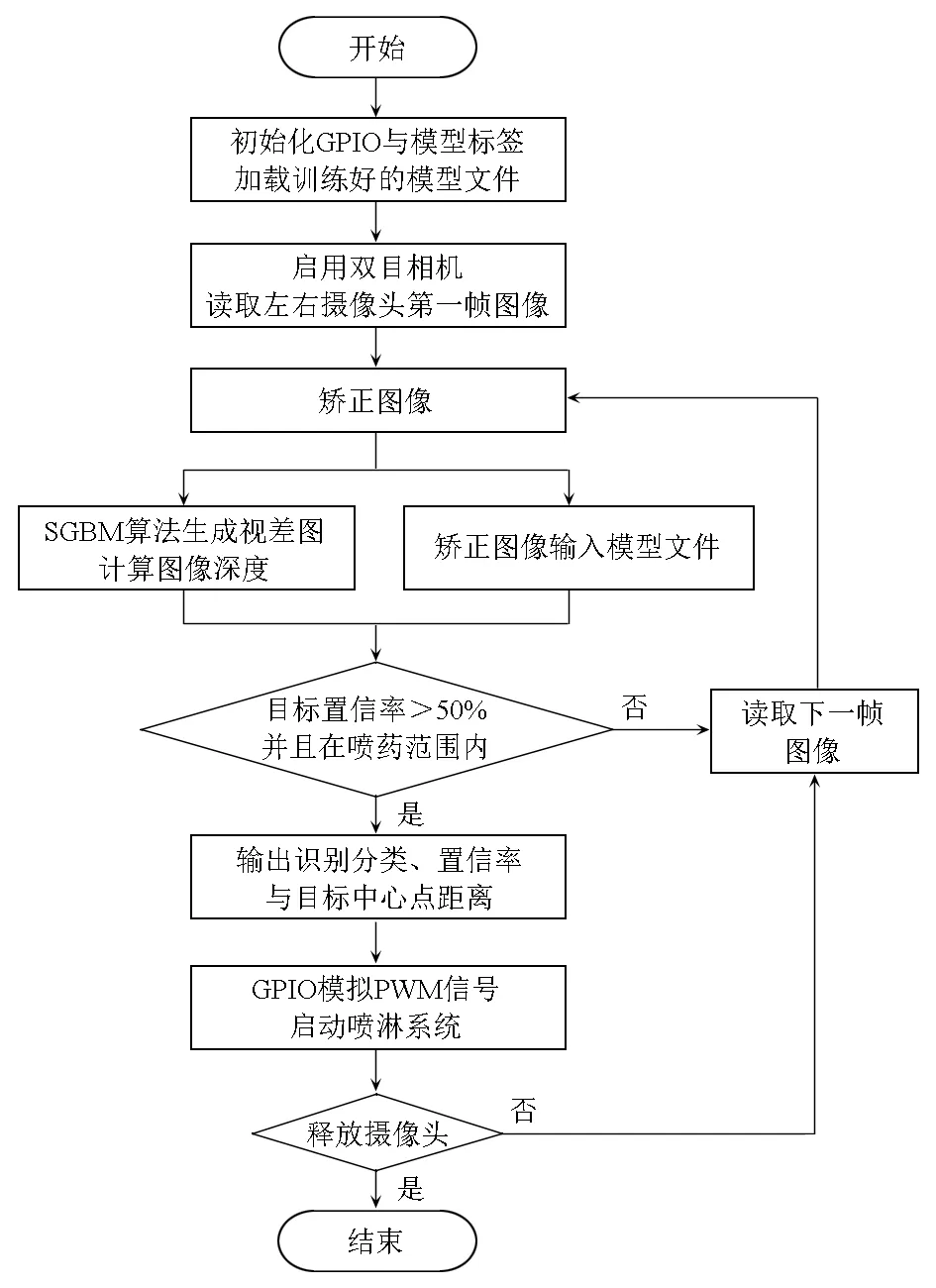
圖5 實時檢測噴藥程序流程Fig.5 Flow chart of spray procedure for real-time detection
2 結(jié)果與分析
SSD-MobileNet 網(wǎng)絡(luò)模型經(jīng)過100 000 步的訓(xùn)練,最終得到模型的分類損失2.932,定位損失0.917,總損失4.286,對玉米秧苗識別準(zhǔn)確率可達到84.18%。玉米秧苗圖像識別效果如圖6 所示。
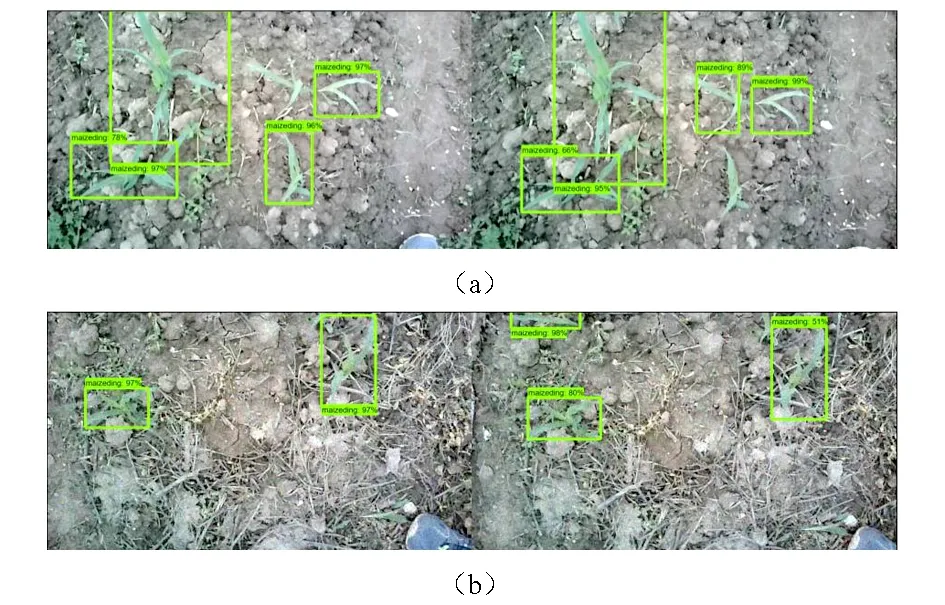
圖6 雙目相機下玉米秧苗識別效果Fig.6 Identification effect of maize seedling under binocular camera
通過固定相機拍攝角度與高度,在玉米試驗田中測試系統(tǒng)的識別與測距效果,經(jīng)過SGBM 算法立體匹配與深度計算,輸出效果如圖7 所示。該系統(tǒng)基本滿足農(nóng)藥噴灑機器人在作業(yè)時對玉米秧苗的識別與測距要求。
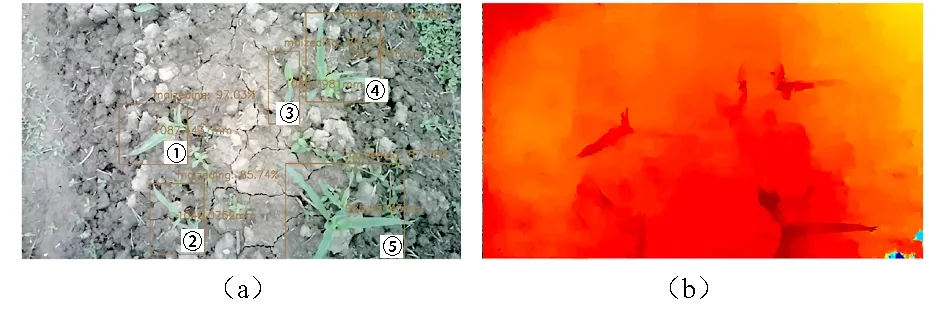
圖7 玉米秧苗左目圖像與視差Fig.7 Left camera image and parallax map of maize seedling
3 結(jié)束語
將深度學(xué)習(xí)的方法應(yīng)用于農(nóng)業(yè)生產(chǎn)環(huán)境下的玉米秧苗目標(biāo)檢測,基于SSD-MobileNetv1 網(wǎng)絡(luò)和ARM 集成板搭建了一種可以用于農(nóng)藥噴灑機器人的視覺識別與噴藥系統(tǒng)。輕量級神經(jīng)網(wǎng)絡(luò)SSD-MobileNetv1 具有運算速度快、精度高的優(yōu)點,適用于嵌入式設(shè)備;而樹莓派開發(fā)板體積小、方便搭載于各種尺寸的移動機器人上,并且成本低、可集成功能多,是性價比較高的嵌入式設(shè)備。搭建好的秧苗識別系統(tǒng)可以滿足田間對玉米秧苗基本檢測的需求,實現(xiàn)對單株玉米秧苗的農(nóng)藥噴灑,也可改變算法網(wǎng)絡(luò)與數(shù)據(jù)集,將該系統(tǒng)應(yīng)用于其他農(nóng)作物的農(nóng)藥、肥料噴灑作業(yè)中。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12