履帶式救援平臺機動性能仿真分析
2024-01-20 10:53:52侯步逸鞏銳王治國任博陳超康鐵宇李順李寶玉張文華
機械工程師 2024年1期
侯步逸,鞏銳,王治國,任博,陳超,康鐵宇,李順,李寶玉,張文華
(北京北方車輛集團有限公司,北京 100072)
0 引言
履帶式運動平臺通常因其良好的野外非結(jié)構(gòu)化環(huán)境的越野機動性能和越障通行能力,被廣泛應用于農(nóng)業(yè)、搜救、軍事、消防、林業(yè)、采礦和行星探索等領域[1]。在自然災害救援現(xiàn)場,大都為無法預知的復雜非結(jié)構(gòu)環(huán)境,要求進入災后現(xiàn)場執(zhí)行任務的機器人具有更強的運動能力,能夠輕松翻越或繞過災后現(xiàn)場各類障礙[2]。因此,對履帶式救援機器人運動平臺的越野機動能力和越障通行性能指標進行評估,是確保履帶救援具有良好的越野通行能力,并迅速進入救援作業(yè)場所的重要保障。文獻[3]開展了履帶式復合機器人的越障性能仿真,建立了主從履帶復合式越障機器人的虛擬樣機平臺,研究了機器人翻越臺階時的重心變化規(guī)律和重心軌跡算法,驗證了重心軌跡是越障能否成功的關鍵影響因素。文獻[4]建立了履帶救援機器人越障過程各階段的運動學和動力學模型,對越障過程的各動作序列進行了動力學建模和分析。本文以某型履帶式救援機器人運動平臺為對象,采用理論計算和多體動力學仿真相結(jié)合的方法,對履帶式救援平臺的爬坡角度、最大越野速度、跨越壕溝寬度和越障高度等機動性和通過性指標進行仿真驗證。為確定救援機器人在復雜環(huán)境中的適應能力提供技術(shù)依據(jù)。
1 履帶救援平臺多體動力學建模
采用多體動力學建模軟件RecurDyn建立了履帶救援平臺多體動力學模型,如圖1所示。該模型主要由車體(含車體及安裝在車體上的所有部件)、車體兩側(cè)行動系統(tǒng)等組成。車體與負重輪之間根據(jù)車輛實際懸掛特性建模,負重輪、主動輪、誘導輪等各車輪之間的相對位置關系、質(zhì)量慣量屬性,行動系統(tǒng)各輪子與履帶之間的相互約束關系,負重輪-履帶-地面之間的相互作用關系根據(jù)車輛設計參數(shù)進行建模,因而能夠準確地反映履帶車輛在典型路面條件下的通過性及機動性等。
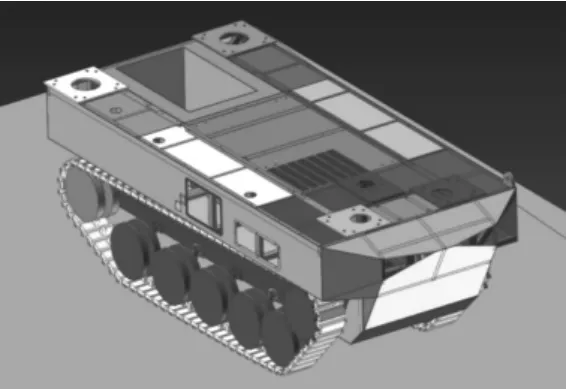
圖1 履帶救援平臺底盤多體動力學模型
根據(jù)履帶救援平臺的結(jié)構(gòu)特點,在適當簡化的基礎上,運用相對坐標運動學理論建立其動力學模型。履帶子系統(tǒng)被簡化為由一系列履帶板組成的履帶環(huán),各履帶板通過履帶銷及橡膠襯套首尾連接。為考慮履帶板對車輛動力學特性的貢獻,模型中將履帶板按剛性體簡化。模型中主要物體的拓撲結(jié)構(gòu)如圖2所示。履帶車輛懸掛系統(tǒng)、行動系統(tǒng)及負重輪-履帶-地面之間詳細力學關系模型的建模過程參見文獻[5]。
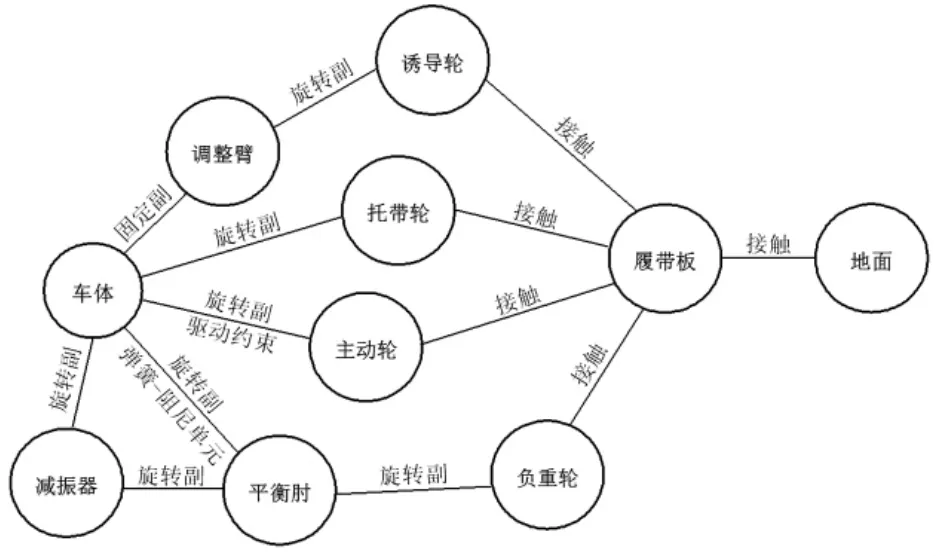
圖2 救援履帶車輛動力學模型拓撲結(jié)構(gòu)
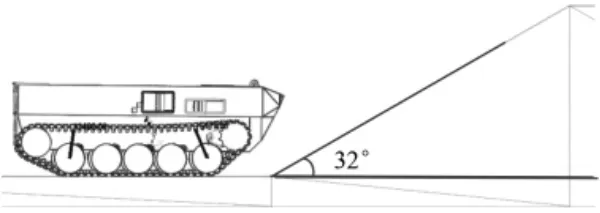
圖3 履帶救援車爬坡仿真動力學模型
2 履帶救援平臺機動性指標仿真校驗
主要采用動力學方程解算結(jié)合多體動力學仿真的方法對履帶救援平臺的最大爬坡度、最高行駛速度、越壕寬及越障高度等機動性和通過性指標進行仿真驗證。
2.1 救援平臺機動性考核指標
表1所示給出了履帶救援平臺的機動性指標要求,要求車輛的最大行駛速度大于35 km/h、最大爬坡角度不小于32°、越壕寬度不小于1 m、跨越障礙高度不小于0.6 m。
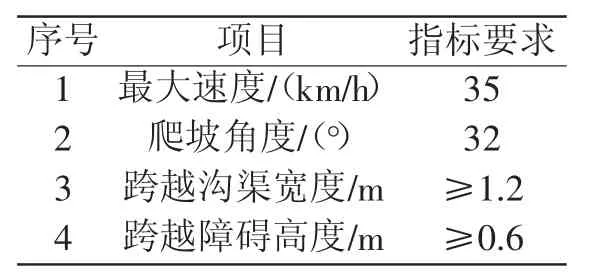
表1 履帶救援平臺機動性指標要求
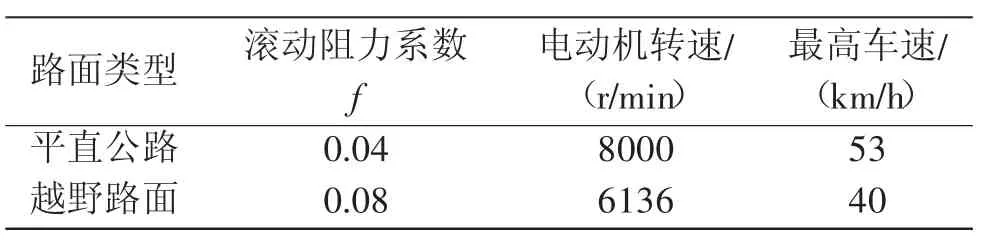
表2 不同路面最高車速
2.2 最高速度仿真計算
根據(jù)整車質(zhì)量m、主動輪半徑rz和滾動阻力系數(shù),計算車輛在不同路面下行駛時的驅(qū)動轉(zhuǎn)矩需求和總轉(zhuǎn)矩需求,采用的公式如下:
式中:Td為驅(qū)動轉(zhuǎn)矩需求,N·m;f為地面滾動阻力系數(shù);m為履帶車輛總質(zhì)量,kg;g為重力加速度;C為空氣阻力系數(shù),可在0.59~1.17范圍內(nèi)取值;ρ為空氣密度,ρ=1.2258 N·s2/m4;v為車速,m/s;rz為主動輪半徑,m;Tmr為驅(qū)動電動機的總轉(zhuǎn)矩需求,N·m;iz為傳動系統(tǒng)總傳動比;ηt為傳動部件效率,取0.92;ηd為驅(qū)動部件效率,取0.9;A為履帶車輛正面投影面積,A=κBH,B為履帶中心距,m;H為全車高,m;κ為修正系數(shù),取0.8~0.9。
根據(jù)動力電池組的標稱電壓及其持續(xù)放電電流,得到其持續(xù)放電功率。扣除用電附件的功率,考慮動力電池組和電動機的效率,可以得到電動機的總驅(qū)動功率采用的公式:
式中:Pbm為動力電池組的持續(xù)放電功率,kW;Vb為動力電池組的標稱電壓,數(shù)值為350 V;Ib為動力電池組的持續(xù)放電電流,數(shù)值為250 A。Pmr為電動機的總驅(qū)動功率,kW;Pf為用電附件的功率,取5 kW;ηb為動力電池組放電效率,取0.9;ηm為電動機效率,取0.9。
根據(jù)電動機的最大驅(qū)動功率和驅(qū)動轉(zhuǎn)矩需求,可以得到其在不同路面下能夠達到的最高轉(zhuǎn)速,根據(jù)電動機最高轉(zhuǎn)速、主動輪半徑和主傳動比,計算最高車速如下:
式中:nmr為不同路面下電動機能夠達到的最高轉(zhuǎn)速,r/min;vmax為理論最高車速,km/h。
2.3 最大爬坡度計算
最大爬坡度是指在特定地面下,車輛不利用慣性沖坡所能通過的最大縱向坡道角。車輛的最大爬坡度是要由車輛的動力性來保證,單位功率越大的車輛,理論上可以具有越大的爬坡度;同時最大爬坡度由地面附著條件制約。因此計算車輛的最大爬坡度時,需要計算車輛的動力性,也要計算車輛的附著特性。
1)最大爬坡度計算需滿足的動力條件。
式中,α為坡道角,履帶車輛爬坡時,車速較低,空氣阻力較小,可忽略。
式(4)可近一步簡化為滿足車輛動力條件的最大爬坡度計算公式為
2)最大爬坡度計算需滿足的附著條件。
式中,φ為地面附著系數(shù)。
根據(jù)表3中不同路面的滾動阻力系數(shù),代入式(5)可以得到驅(qū)動電動機的轉(zhuǎn)矩需求。由于設計選用驅(qū)動電動機的額定轉(zhuǎn)矩為150 N·m,峰值轉(zhuǎn)矩為360 N·m。因此,在平直公路和越野路面下,均能夠滿足爬32°坡的要求。

表3 不同路面爬坡電動機轉(zhuǎn)矩需求
在多體動力學模型中,建立了32°縱向坡道的仿真模型,進行履帶式救援平臺通過32°縱向坡道的動力學仿真計算,重點驗證履帶縱向坡道能夠為履帶車輛爬坡提供足夠的地面附著力。
圖4所示為履帶車輛爬越32°縱向坡道過程的動力學仿真計算動畫演示。從圖中可以看出履帶式救援運動平臺能夠在具有足夠的地面附著力下爬上32°縱向坡道。
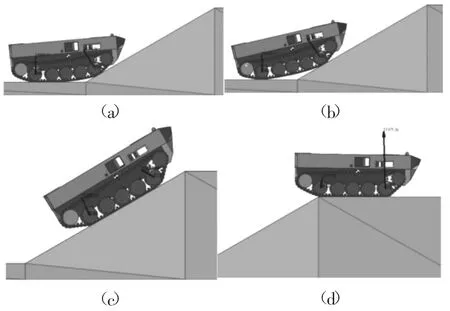
圖4 履帶救援平臺縱向爬坡動力學仿真
2.4 跨越壕溝寬度仿真計算
2.4.1 越壕寬理論計算
越壕寬是指車輛以低速行駛能跨越水平地面上硬邊緣壕溝的最大寬度,約等于車輛重心到主動輪和誘導輪中心的兩段距離中較小的一段長度。為了保證履帶車輛不會掉入溝中,在車輛駛?cè)牒緶蠒r,確保前輪能在車輛的重力作用線未越過駛?cè)脒呇厍按钌像偝鲞呇兀辉谲囕v駛出壕溝時,確保后輪在車輛重力作用線已越過駛出邊沿后才離開駛?cè)脒呇亍?/p>
圖5所示為履帶車輛越壕寬度的理論計算示意圖,從圖中看出,履帶車輛的越壕寬度取決于誘導輪中心A′在地面上的投影點A至重力作用線與下支履帶交點D的距離A1,以及或主動輪中心B′在地面上的投影點B至重力作用線與下支履帶交點D的距離A2。A1、A2中較小者即為履帶車輛越壕寬度。A1小則履帶車輛駛?cè)牒緶蠒r車頭易掉入溝內(nèi);A2小則履帶車輛駛出壕溝時車尾易掉入溝內(nèi)。誘導輪中心A′至重心C的水平距離為a,誘導輪中心距地高為h1,則
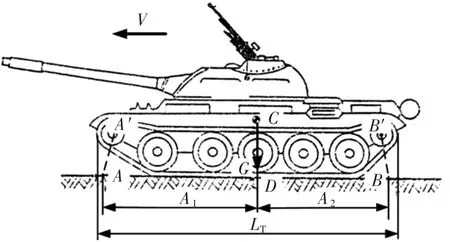
圖5 履帶救援車越壕寬度的理論計算示意圖
設主動輪中心B′,至重心C的水平距離為b,主動輪中心距地高為h2,則
此外,現(xiàn)代履帶車輛平地低速通過壕溝的寬度一般可以由下式近似得到:A=(0.3~0.4)LT。其中:A為越壕寬度,m;LT為車體長,m。
2.4.2 救援車越壕寬動力學仿真
在多體動力學軟件中,建立履帶救援車多體動力學模型和壕溝地面模型如圖6所示,地面壕溝寬度為1.6 m。
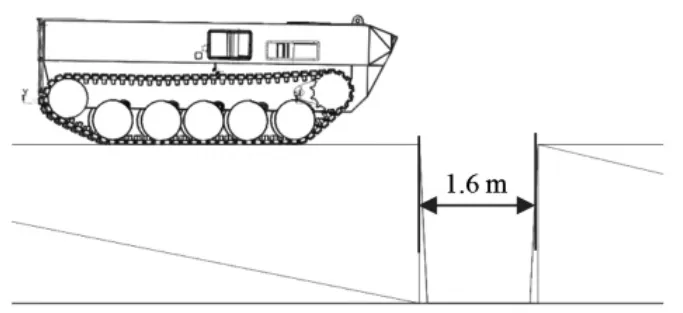
圖6 履帶救援車跨越壕溝動力學模型
圖7 所示為動力學仿真計算得到的履帶式救援車跨越壕溝的動力學仿真過程動畫,圖中的箭頭表示為前后負重輪及主動輪在車輛跨越壕溝過程的動態(tài)沖擊載荷大小。從圖中可以看出,越障時救援車低速接近壕溝障礙,車輛前部負重輪依次通過壕溝障礙,隨著重心的前移,第1負重輪前端和壕溝右側(cè)壁面發(fā)生撞擊,如果壕溝跨度過大,則履帶前端無法順利跨上壕溝右側(cè)壁,或者因重心位置變化大,導致履帶前端與壕溝右側(cè)壁發(fā)生很大剛性撞擊,破壞履帶和前側(cè)負重輪;隨后到前端負重輪和履帶順利搭上壕溝右側(cè)壁時,其余負重輪則依次前進,直到最后一個負重輪也順利搭上壕溝右側(cè)壁時,整個履帶車輛完全通過壕溝障礙。
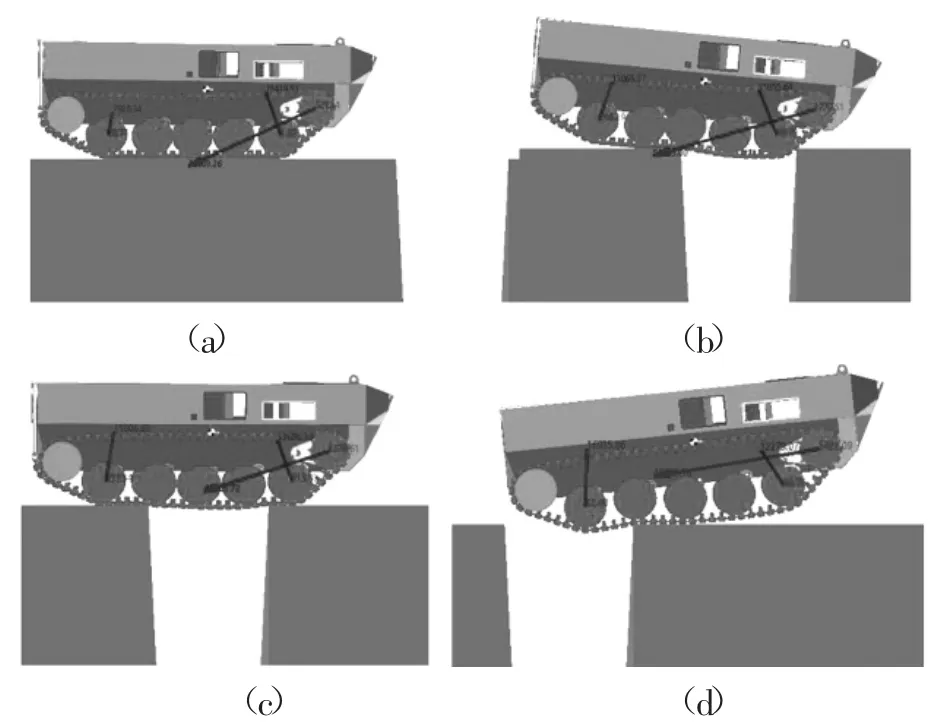
圖7 履帶救援車跨越壕溝動力學仿真過程
圖8(a)所示為履帶救援車跨越壕溝障礙過程中,車體質(zhì)心位置在垂直方向的變化曲線。從圖中看出,當前側(cè)負重輪位于壕溝上方而處于懸空狀態(tài)時,車輛呈現(xiàn)向下俯仰狀態(tài),質(zhì)心位置在垂向方向上數(shù)值變小;隨后隨著后側(cè)負重輪依次通過壕溝障礙,重心逐漸恢復到原先高度,當最后一個負重輪即將通過壕溝障礙時,車輛處于向上俯仰狀態(tài),支撐質(zhì)心在垂直方向的數(shù)值最大。圖8(b)所示為前側(cè)主動輪軸上的沖擊載荷變化曲線,從該曲線可以看出,當車輛前側(cè)負重輪位于壕溝上方而處于懸空狀態(tài)時,主動輪上的沖擊載荷最小;當前側(cè)負重輪剛剛跨上壕溝右側(cè)壁時,由于車輛俯仰慣性的作用,位于車輛前側(cè)的主動輪和壕溝右側(cè)壁之間會產(chǎn)生很大的撞擊,會產(chǎn)生一個峰值撞擊力。而后撞擊力逐漸減小,履帶車輛在通過壕溝障礙的過程中,主動輪上的履帶作用力會產(chǎn)生很大的波動,當車輛完全通過壕溝障礙時,主動輪上的沖擊力恢復到平穩(wěn)狀態(tài)。
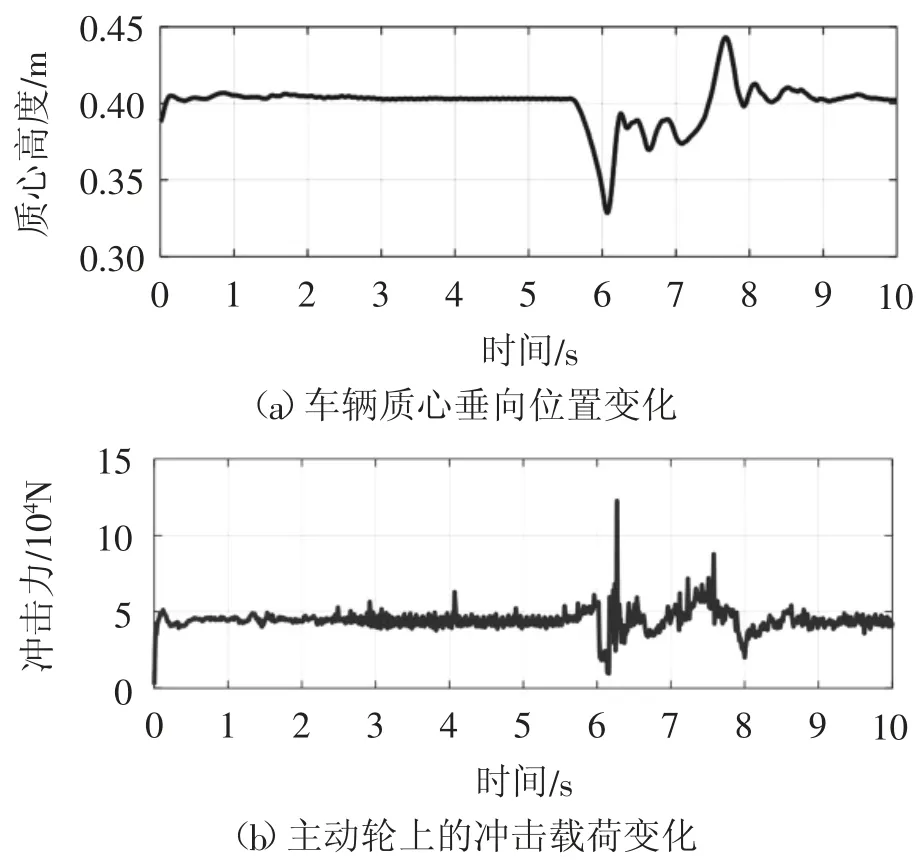
圖8 履帶救援車跨越壕溝過程動態(tài)響應仿真結(jié)果
2.5 跨越障礙高度仿真計算
2.5.1 跨越障礙高度計算方法
過垂直墻高度是在車輛不作特殊準備的情況下,所能攀登的水平地面上堅實垂直壁的最大高度。過垂直墻高度通常由前輪中心高度決定,也與地面附著力和車輛重心位置等有關。圖9所示為履帶車輛通過垂直墻障礙示意圖。
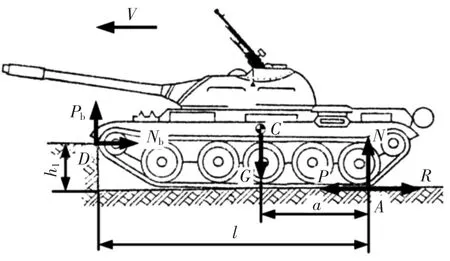
圖9 履帶車輛過垂直墻障礙示意圖
以往研究表明:履帶車輛前輪中心距地高h1越高,通過崖壁的高度也越高;車體越長,AD兩點連線在水平方向上的距離l越長,則攀登階段車體與水平面之間的夾角也越小,越便于車輛躍上臺階。履帶車輛通過崖壁的高度約等于前輪中心距地高。
2.5.2 救援車越障高度動力學仿真
在多體動力學軟件中,建立履帶救援車多體動力學模型和地形障礙物模型如圖10所示,障礙高度為0.6 m。
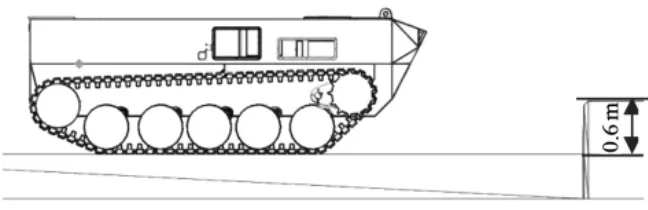
圖10 履帶救援車越障高度動力學仿真模型
仿真履帶救援車跨越垂直障礙物時,按照使用規(guī)范要求采用低速接近低速通過的原則實施。圖11給出了履帶救援車通過0.6 m高垂直障礙的動力學仿真過程,履帶救援車低速接近垂直障礙時,位于履帶前側(cè)的主動輪部位先與垂直障礙物接觸。然后在車輛驅(qū)動力的作用下,履帶前端逐漸爬上垂直障礙物;后面負重輪依次爬上垂直障礙;當所有負重輪均爬上垂直障礙后,即完成越障通過性能的指標仿真計算。
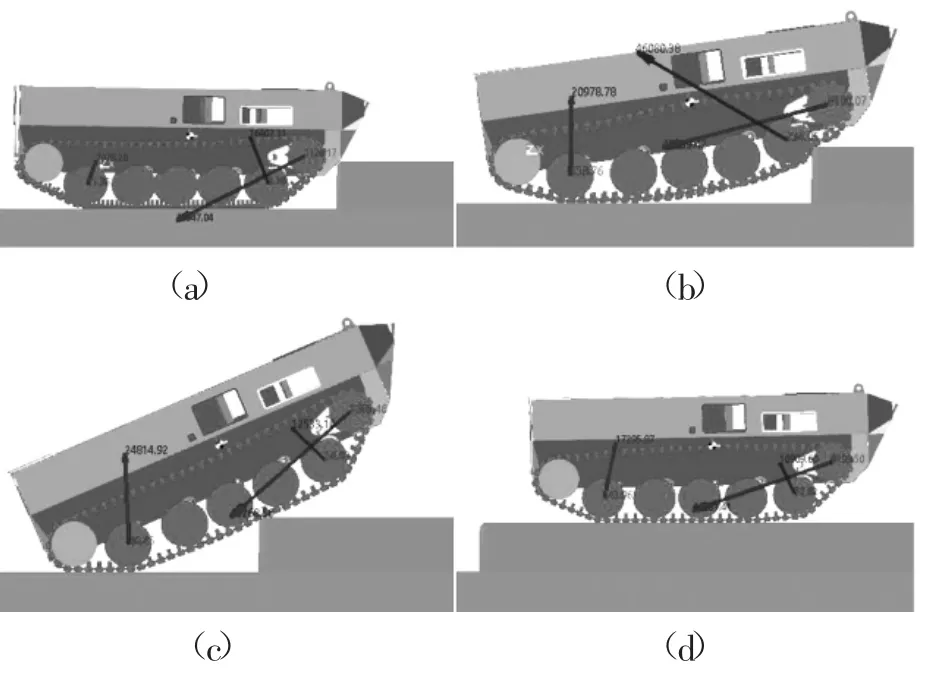
圖11 履帶救援車越障高度仿真過程
履帶救援車跨越垂直障礙時,有兩個階段容易導致車輛無法通過垂直障礙。第一個階段是前側(cè)的主動輪剛剛與垂直障礙接觸時刻,在該時刻如果車速過快,位于履帶前側(cè)的主動輪會與垂直障礙之間產(chǎn)生非常大的撞擊力,在該撞擊力作用下,容易引起主動輪和前側(cè)履帶的破壞,同時由于撞擊形成大的反力,使得車輛無法正常通過垂直障礙。第二個階段是履帶救援車履帶接地段的中心點剛好與垂直障礙接觸時,此時履帶車輛的重心位置對于車輛能否順利跨越垂直障礙非常關鍵。
圖12所示為履帶救援車越障高度仿真過程中車輛質(zhì)心垂向位置和主動輪上沖擊力的變化。由于仿真過程中履帶車輛采用低速方式來通行,因此主動輪上的沖擊載荷的動載系數(shù)相對較小。
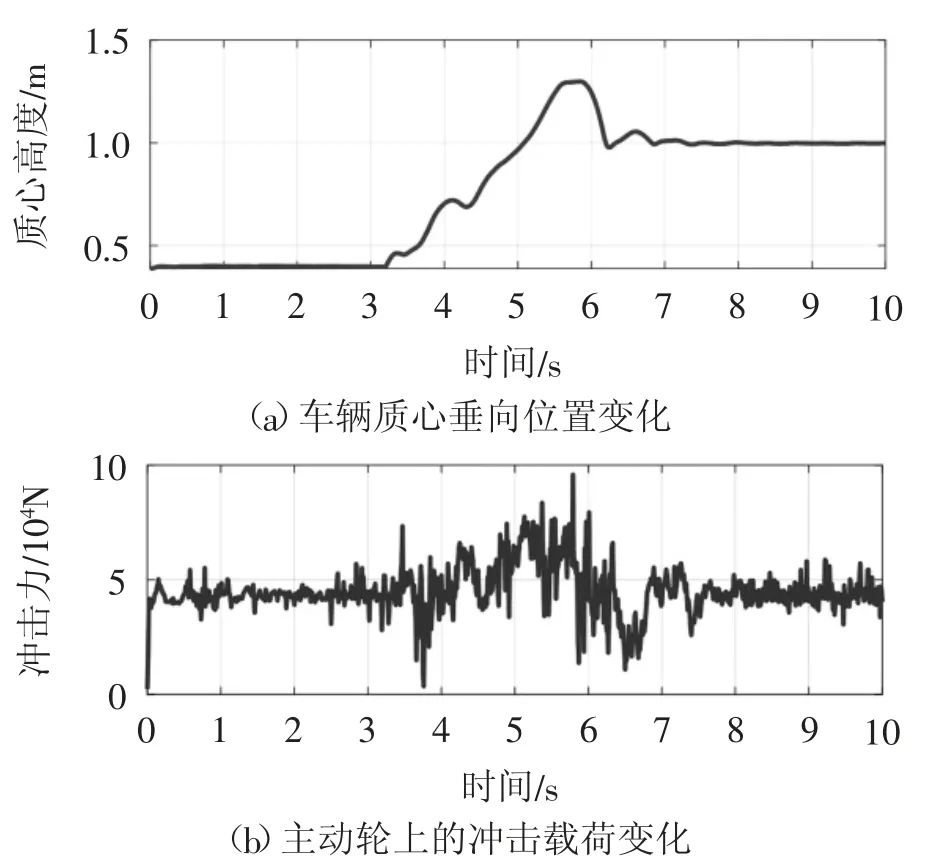
圖12 履帶救援車越障高過程動態(tài)響應仿真結(jié)果
3 結(jié)語
為了能夠在設計階段對履帶式救援車的機動性指標進行驗證。本研究采用理論計算和多體動力學仿真分析相結(jié)合的方法,建立了履帶底盤行動系統(tǒng)的多體動力學模型,開展了履帶式救援平臺最高速度、最大爬坡度、越壕寬度及跨越障礙高度等機動性和通過性指標的考核驗證。從理論計算和多體動力學仿真計算結(jié)果來看,提出的履帶平臺的機動性指標均能得到滿足。多體動力學仿真計算過程中,還給出了車輛通過障礙過程的姿態(tài)和載荷的變化趨勢,為進一步優(yōu)化履帶救援平臺的方案設計提供了支撐。
