多徑利用雷達目標探測技術綜述與展望
2024-01-21 13:15:08孔令講郭世盛陳家輝吳佩侖崔國龍
雷達學報 2024年1期
孔令講 郭世盛 陳家輝 吳佩侖 崔國龍
(電子科技大學信息與通信工程學院 成都 611731)
1 引言
當目標隱藏于建筑拐角或其他非直視(Non-Line-Of-Sight,NLOS)區域時,由于建筑物的遮擋,電磁波難以穿透多層建筑墻體以獲取目標信息,導致傳統直視(Line Of Sight,LOS)探測方法失效。為解決這一問題,多徑利用雷達(Multipath Exploitation Radar,MER)技術應運而生。該技術利用電磁波在街角盲區非直視傳播形成的衍射和多次反射信號,通過建立多路徑傳播模型和改進信號處理方法,實現對隱蔽目標的探測。正是因為其“拐彎探測”的能力,多徑利用雷達技術被廣泛應用于反恐維穩、區域監視和智能駕駛等領域,具有重要研究價值[1-5]。
基于空中平臺的多徑利用雷達技術憑借其靈活性、廣視域等優勢而被率先研究[6-24]。然而,空基多徑利用雷達一般采用“側下視”工作模式,其受雜波干擾嚴重,導致回波中地物雜波與有用多徑信號相互耦合。因此,在強雜波環境下分選出有用路徑信號,并將其與目標進行關聯是其研究的核心問題。相較于空中平臺,地面平臺采用“平視”工作模式,大大減少了雜波抑制的難度[25-90]。因此在該平臺下,多路徑回波綜合利用是多徑利用雷達的核心。
目前,多徑利用雷達已經在機載平臺和地基平臺上得到了成功應用,并在目標探測和場景估計等領域取得了顯著的進展。有鑒于此,本文首先介紹基于多徑信號的非直視目標探測原理,然后根據不同搭載平臺對多徑利用雷達目標探測技術的發展脈絡進行梳理與討論,最后對多徑利用雷達目標探測技術的發展特點進行總結,并展望其未來發展趨勢。
2 基于多徑信號的非直視目標探測原理
建筑環境的多樣性以及電磁波傳播現象的復雜性,綜合導致接收到的多路徑回波呈現時變和空變特性。因此,針對多樣化非視距場景,建立能夠準確表征電磁傳播路徑的回波映射函數是多徑探測的核心問題。
近年來,利用電磁波在建筑墻角的衍射和建筑表面的反射等多路徑傳播機理對建筑環境非直視目標進行檢測定位、成像及跟蹤,是實現建筑環境遮蔽目標探測的新質探測手段。城市環境中密集分布的各式各樣建筑物使得雷達到探測目標之間的電磁波傳播路徑復雜多變。同時,電磁波在建筑墻角的衍射、墻面的反射以及目標表面的散射等傳播特性關系到目標多路徑回波信號能否被有效利用。因此,建立典型城市環境下多路徑信號傳播模型并分析其中多路徑信號傳播特性是多路徑信號聯合探測的重要前提。通常,為了簡化模型以便分析,將電磁波的反射等效為鏡面反射,并利用射線追蹤(Ray-Tracing)構建電磁波傳播模型。
結合典型的城市建筑、街道等復雜城市環境多路徑探測場景,本文選取了具有代表性的城市建筑非直視目標探測場景--L形建筑。進一步地,本文針對該場景模型對多路徑信號傳播模型及傳播特性進行如下分析。將L形建筑拐角中三面墻分別命名為Wall-1,Wall-2和Wall-3,則有等效多徑傳播模型圖如圖1所示。
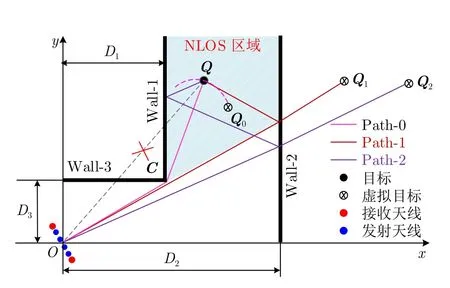
圖1 典型L形NLOS場景Fig.1 Typical L-shaped NLOS scenario
假設C為Wall-1和Wall-3形成的墻角,其坐標為C=[xC,yC]T,且Wall-1,Wall-2和Wall-3的位置和布局Dh,h=1,2,3已知。考慮I個遮蔽目標位于Wall-1和Wall-2構成的走廊之中,為了探測隱藏的目標,在角落的另一側放置了M個發射天線和N個接收天線的多通道雷達,雷達的中心坐標設置為[xO,yO]T。
假設第m個發射天線Tm=[xt,m,yt,m]T發射信號為s(t),則第n個接收天線Rn=[xr,n,yr,n]T接收的回波信號,表示為
其中,σ為發射衰減系數,表示發射路徑時延,為接收路徑時延。p和q分別為信號經衍射或反射到達目標的發射路徑數和接收路徑數。ξ(t)為雜波項,包含發射與接收之間的直耦信號以及墻體反射回波,ψ(t)為環境噪聲。
根據電磁波的多徑傳播特性,每條路徑都會形成等效的虛擬目標,表示為Q0—Q2。此外,為了實現目標定位,需要對不同路徑產生的虛擬目標進行參數化表示。不失一般性,假設單個目標Q位于[xt,yt]T。通過均勻幾何繞射理論(Uniform Geometric Theory of Diffraction,UTD),由衍射路徑Path-0生成的虛擬目標Q0可以表示為
其中,上標T表示矩陣轉置,lw表示拐角C到目標Q之間的距離。此外,每條反射路徑也會形成對應的虛擬目標Q1和Q2,表示為
其中,D1和D2分別為Wall-1和Wall-2對應的x軸坐標。
根據目標位置與多徑反射之間的幾何關系,可推導出發射和接收路徑的傳播時延,表示為
其中,c 為光速,‖·‖為向量二范數。雙程傳播時延即為發射和接收路徑時延之和。
而在實際探測環境中,為了提升雷達探測性能,在保證雷達不暴露于遮蔽目標的前提下,應盡量使得雷達天線靠近墻角且與建筑下側墻夾角盡量大[37]。
上述多徑模型將反射近似為鏡面反射,而對漫反射等予以忽略。且該模型為通式,其會隨著電磁頻段、目標材質而有所不同。例如,當電磁波頻段較低時,測量損耗較小,衍射和高階反射多徑現象明顯,而電磁波頻段較高時,傳播損耗大,接收到的多徑大多為低階反射。此外,根據不同搭載平臺、探測場景,多徑模型也會有所不同。具體而言,基于空中平臺的多徑探測技術通常將問題簡化為二維平面分析,在這種情況下,電磁傳播距離遠,多徑衰減較大,再加之地雜波影響,綜合導致了回波信號復雜,因此如何提取其中的多徑信息是關鍵所在。而基于地面平臺的多徑探測技術往往場景小,電磁傳播距離近,多徑衰減較小,可利用多徑豐富,分選多徑則是研究重點。
3 基于空中平臺的多徑探測技術
空中平臺(飛機、高塔等)是較早引入多徑信息輔助進行目標探測的平臺,借助側下視的探測角度特點,其可在三維立體空間中充分利用多徑信號,擴大系統的覆蓋范圍,提升對地面非視距運動目標的探測性能。
3.1 可行性驗證
在美國國防部高級研究計劃局(Defense Advanced Research Projects Agency,DARPA)的支持下,Krolik等人[6]于2006年率先開展了利用電磁波多徑傳播效應提升地面動目標指示(Ground Moving Target Indicator,GMTI)系統性能的相關研究。通過推導目標位置估計的克拉美-羅下界(Cramer-Rao Lower Bound,CRLB),該團隊發現:隨著使用的多徑信號數量增加,GMTI系統的定位精度也會有所提高。同時,他們還分別計算了直視目標回波和非直視遮蔽目標回波的傳播概率,并通過仿真實驗驗證了利用多徑信號可顯著提升機載雷達探測覆蓋范圍和探測精度,如圖2所示。同樣地,為分析GMTI中多徑信號的影響因素,Linnehan等人[7]在實際城市場景中分析了動目標的多徑信號回波幅度及微多普勒特征,佐證了利用多徑信號實現非直視目標探測的可行性。
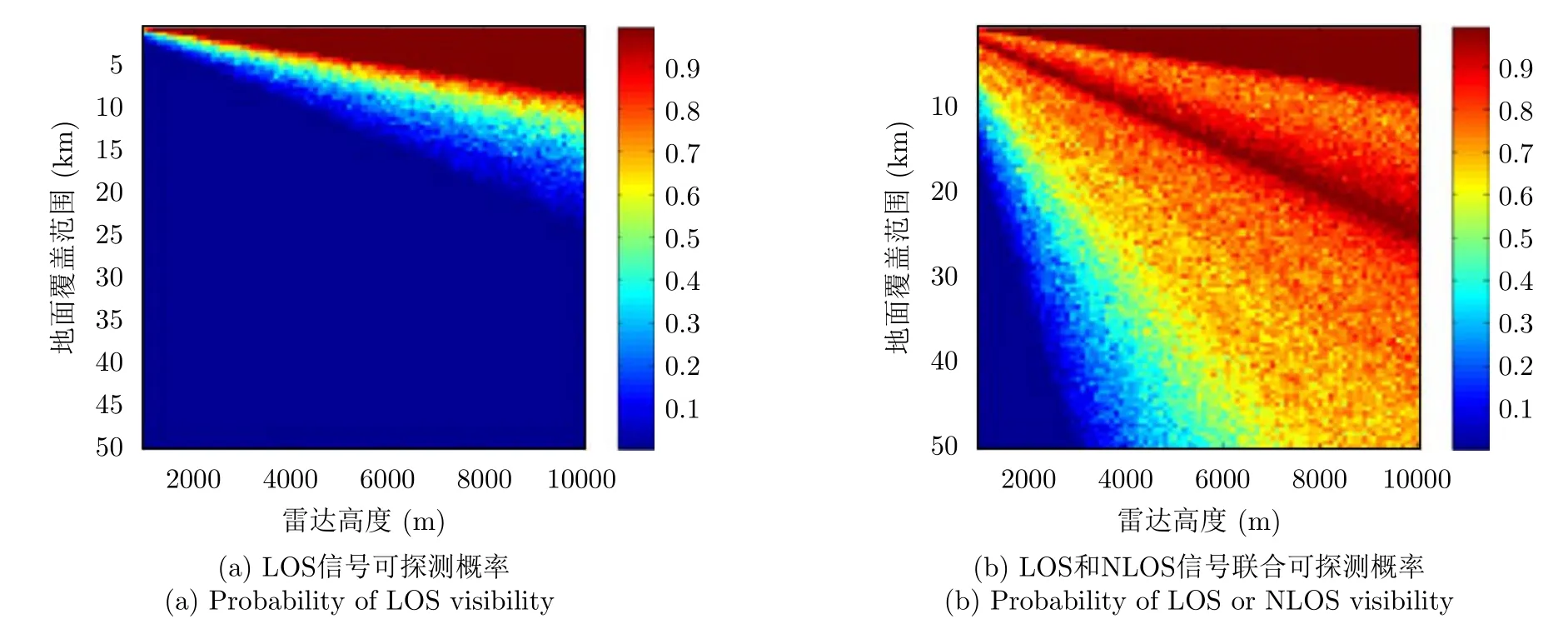
圖2 地面范圍覆蓋的概率與雷達高度的關系[6]Fig.2 The probability of ground range coverage versus radar altitude[6]
3.2 影響因素分析
為在GMTI系統中更有效地利用多徑信號,需要充分分析建筑材質、電磁波頻率和入射角等因素對多徑信號的影響。為此,美國空軍研究實驗室(Air Force Research Laboratory,AFRL)的Linnehan等人[8]在2009年基于近場積分方法,建立了點目標散射模型。基于該模型,其研究了墻壁粗糙度對多徑信號功率和多普勒響應的影響。而美國陸軍研究室(US Army Research Laboratory)的Tahmoush等人[9]則測量匯總了磚、灰泥、木板等多種建筑材料的反射特性,以期指導GMTI雷達系統的頻率和極化設計,其中不同極化的電磁波雙程傳播能量衰減隨頻率和墻壁材質的變化情況如表1所示。總體而言,當探測信號為低波段,如X波段時,多徑利用雷達在磚墻、粉刷墻面等城市建筑中的探測性能較好。而當探測信號為高波段,如Ku,Ka等波段時,多徑利用雷達在混凝土墻面等城市建筑中的探測性能較好。法國航空航天實驗室的Nouvel等人[10,11]利用搭載了Ka波段合成孔徑雷達(Synthetic Aperture Radar,SAR)的飛機在城市環境采集了大量數據,分析了電磁波的入射角度和建筑材料引起的NLOS信號衰減,并通過實際采集的雷達數據集對回波中的多徑成分進行了分析。
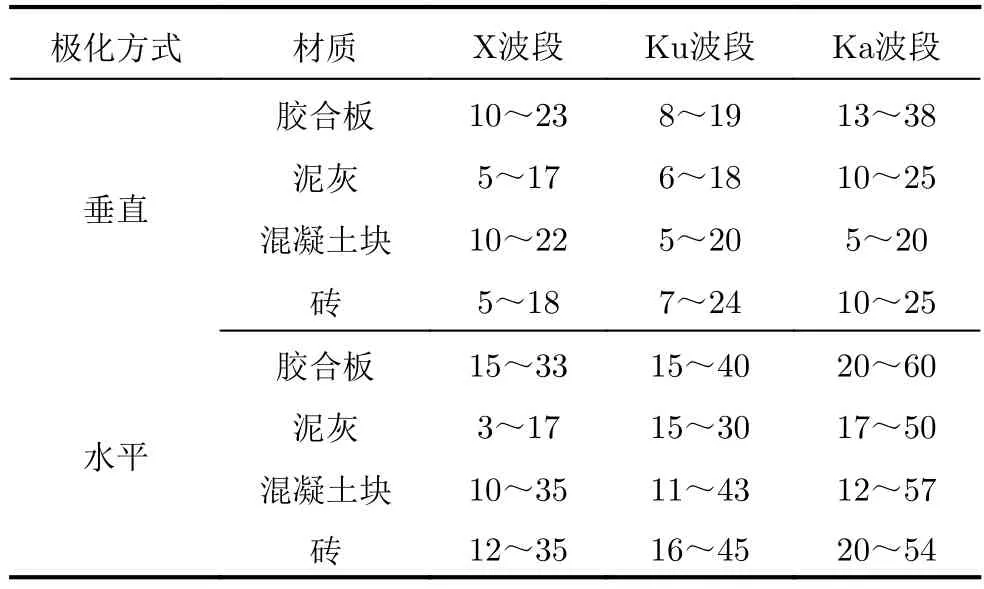
表1 不同極化電磁波雙程路徑衰減隨頻率和材質變化[9] (dB)Tab.1 Two-way attenuation of different polarized EM waves varies with frequency and material[9] (dB)
3.3 基于多徑信號的建筑環境感知
此外,除了上述利用多徑信號實現非直視目標探測的可行性及影響因素分析的研究工作,基于多徑信號的建筑布局感知技術也是目前的研究熱點。其中,中國科學院的Cheng等人[12,13]針對城市建筑環境感知問題,在2018年構建了建筑二面角結構的多徑散射理論模型,基于合成孔徑雷達層析成像原理,實現了對建筑物高度的估計。2022年,Li等人[14]在使用高分辨率層析合成孔徑雷達點云重建建筑物時發現,機載陣列層析合成孔徑雷達點云中高階散射點可以提供建筑物背面豐富的信息,由此提出了基于4次反射的建筑物背面重建方法,在屋頂點較差的情況下,例如由于遮擋而導致的屋頂反射點不完整,或者由于屋頂散射弱而導致的屋頂點稀疏時,依然可以實現建筑物背面的高精度重建。
3.4 基于多徑信號的非直視目標探測
針對非直視目標探測這一問題,AFRL的Fertig等人[15]首次提出了“多徑利用雷達”概念,推導了復雜城市環境下目標定位與跟蹤的克拉美-羅下界,并利用實際城市場景中采集的數據驗證了多徑利用雷達可以獲得更精細的定位和跟蹤性能[16],雷達搭載平臺及實驗數據處理結果如圖3所示。其中,圖3(b)和圖3(c)分別為LOS信號的覆蓋區域和NLOS信號的覆蓋區域,可見NLOS信號的引入確實提高了機載多徑利用雷達的對地覆蓋范圍。而圖3(d)展示了城區內對兩個不同目標的跟蹤結果,分別用藍色和紅色表示,且用實線表示目標真實運動軌跡,用虛線表示估計運動軌跡,圖3(e)則給出了兩個目標的跟蹤誤差。法國航空航天實驗室的Nouvel等人[17]在之前工作[10,11]的基礎上,驗證了干涉測量信息可輔助判斷出非視距區域,并能夠很好地探測到地面非直視目標。美國亞利桑納州立大學的Chakraborty等人[18]提出了一種將多路徑利用和自適應波束形成相結合的方法,該方法基于多徑信號對復雜城市環境下的移動車輛進行定位跟蹤,通過動態設計發射波形參數的方式利用和優化多路徑回波信號,進而最小化地估計出目標軌跡的均方誤差,城市環境實驗結果表明,利用不同多徑的信息互補可有效提升目標跟蹤性能,其實驗場景及實驗結果如圖4所示。2019年,西安電子科技大學的胡劉博[19]基于多徑回波到達時間,通過構建虛擬鏡像探測源,利用橢圓交叉定位方法實現了非直視目標定位。與此同時,他還在交互多模型粒子濾波的基礎上,實現了基于多徑信息的非直視機動目標跟蹤[19]。
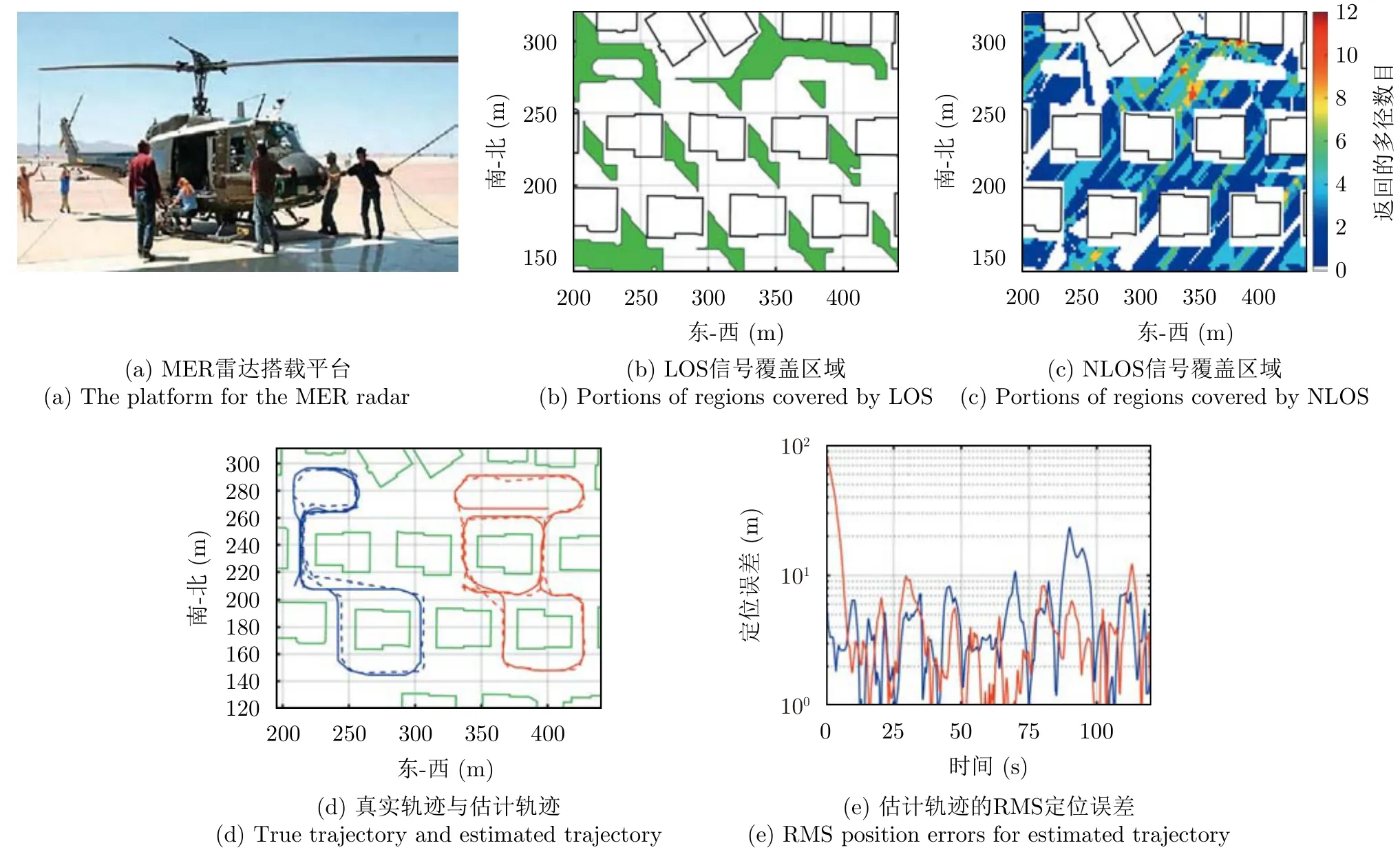
圖3 MER雷達輔助地面動目標定位跟蹤搭載平臺及實驗結果[16]Fig.3 MER radar assisted ground moving target tracking platform and experimental results[16]
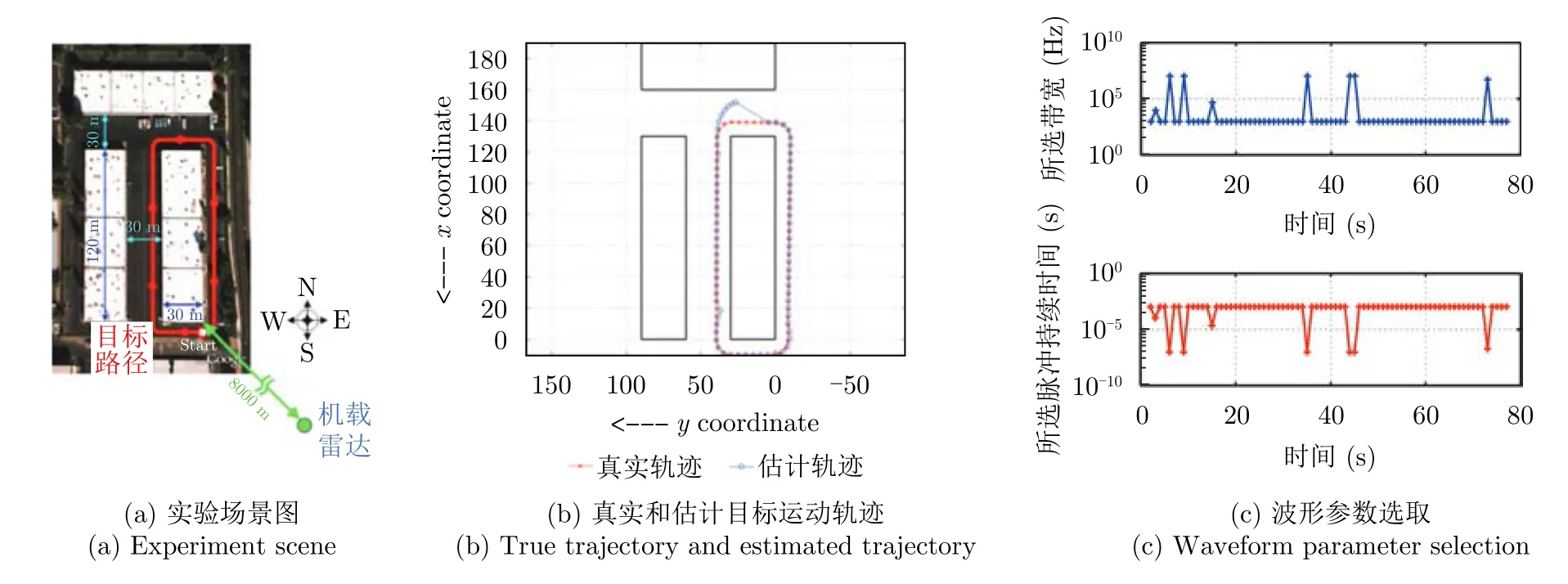
圖4 基于自適應波形設計的目標跟蹤方法實驗場景及實驗結果[18]Fig.4 Experimental scenario and results of target tracking method based on adaptive waveform design[18]
此外,多徑信息還可以應用于全球衛星導航系統(Global Navigation Satellite System,GNSS)[20-22]中,以提升車輛的定位精度。德國開姆尼茨工業大學的Obst等人[23]為減小衛星探測復雜城市環境中的目標時由多徑引入的定位誤差,基于城市建筑的三維模型提出了一種多星GNSS城市目標探測算法,通過光線追蹤概率模型來辨別多徑回波,從而估計出了目標運動軌跡,有效提高了復雜城市區域內目標的定位精度。受其啟發,Ng等人[24]將全球定位系統(Global Positioning System,GPS)的非視距信號視為鏡像位置處虛擬衛星的視距GPS信號,再通過直接位置估計獲得最大似然估計(Maximum Likelihood Estimate,MLE)的解。其通過實驗證明:與常規的GPS定位相比,所提出的算法水平定位精度提高了40 m。
4 基于地面平臺的多徑探測技術
基于空中平臺的非直視目標多徑探測技術主要搭載于衛星、大型直升機等空中平臺,導致其成本較高,難以滿足反恐維穩、城市巷戰、智能駕駛等應用需求。因此,為解決探測成本高、復雜城市環境下機動性差的問題,基于地面平臺的多徑探測技術逐漸得到發展。依據對非直視區域遮蔽目標信息的獲取能力,基于地面平臺的多徑探測技術可劃分為目標檢測、目標識別、二維目標定位、三維目標信息獲取等。
4.1 非直視目標檢測與識別
瑞典國防研究局的Sume等人[25]、荷蘭國家應用科學研究院Deiana等人[26]、法國航空航天實驗室的Rabaste等人[27]率先開展了城市環境非直視目標多徑探測研究,構建了電磁波在非直視場景的多徑傳播模型,并借助距離像等信息佐證了所建模型的正確性,由此驗證了利用墻面反射和墻角衍射信號實現非直視運動目標檢測的可能性。
Sume等人[28]利用短時傅里葉變換分析了墻角后隱蔽人體走動和呼吸產生的微多普勒信號,并結合運動目標指示(Moving Target Indication,MTI)技術提出了一種快速目標距離軌跡檢測算法。隨后,該團隊[29,30]在典型城市街道上開展了墻角隱蔽目標探測實驗,目標類型包括走動的人、騎自行車的人以及開汽車的人,通過對經多普勒濾波后的信號進行處理得到不同類型目標的距離信息和多普勒特征,其中不同多徑信號的多普勒特征和距離信息如圖5所示,其中黑色箭頭指向不同多徑貢獻的信號分量。Linnehan等人[31]從多徑信號傳播特性出發,在實際城市場景中,通過雙站雷達實驗分析了從粗糙墻面反射的多徑信號的空間相干性及能量分布特點,并利用車載單站雷達驗證了多徑響應的可預測性。
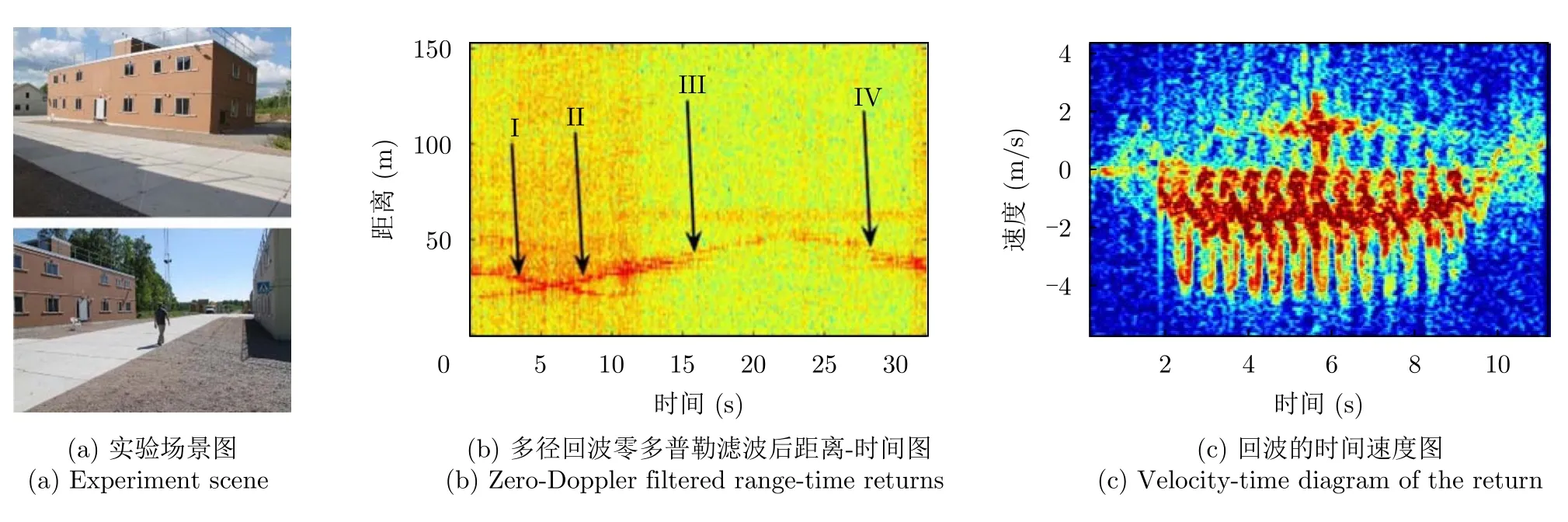
圖5 城市非視距環境中多個行人的微多普勒信號分析實驗場景及實驗結果[30]Fig.5 Experimental scenario and results of micro-Doppler signal analysis of multiple pedestrians in urban NLOS environment[30]
上述研究表明,不同類型非直視目標的微多普勒、回波距離像等均有所不同,因此,基于此類特征可實現對不同目標的分類。Gustafsson等人[32]基于離散短時傅里葉變換和自相關技術提取了無人機旋翼的時間-速度譜圖,通過分析無人機旋翼的微多普勒特征,實現了對不同材質旋翼的判別。圖6展示了金屬旋翼和塑料旋翼的時間-速度譜圖。而日本電氣通信大學的He等人[33,34]提出了一種基于機器學習的人體衍射信號識別算法,該算法在支持向量機(Support Vector Machines,SVM)中引入原始回波、時間倒數、時間偏移以及短時傅里葉變換(Short Time Fourier Transform,STFT)這4類特征,實現了人體和金屬物體的區分,證明了時變的特征向量在LOS和NLOS情況下對人體和人造物體都有較高識別率,結果如圖7和表2所示。2019年,在AFRL的資助下,Tian等人[35]提出了一種新的無人機檢測系統,在非直視條件下,檢測率高于97%。該系統利用慣性測量單元捕獲無人機運動,借助接收信號強度(Received Signal Strength,RSS)之間的差異,區分了LOS信號和NLOS信號,基于深度學習方法實現了對NLOS無人機的檢測。

表2 時變的特征向量在LOS和NLOS情況下對人體和圓柱體的分類結果[34]Tab.2 Classification results of human body and cylinder under LOS and NLOS by time-varying eigenvectors[34]
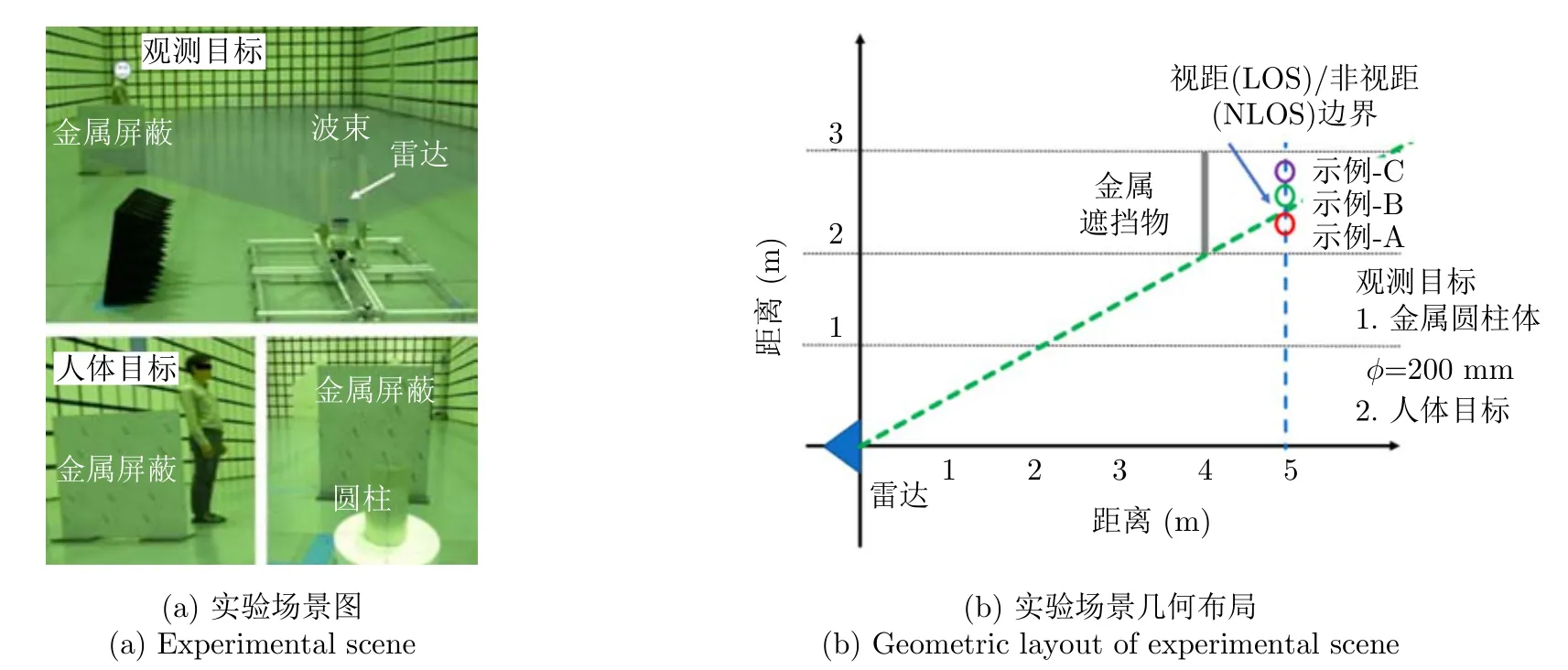
圖7 毫米波雷達基于衍射信號的人體識別實驗場景及實驗結果[34]Fig.7 Human body recognition experiment scene and experimental results of millimeter wave radar based on diffraction signal[34]
4.2 非直視目標二維定位
然而,上述關于非直視目標檢測與識別的相關研究僅獲取了目標的一維信息,判別了目標存在與否,并對存在的目標進行識別,未能滿足實際應用中獲取目標確切位置的需求。因此,后續眾多研究機構圍繞非直視目標位置信息的獲取展開了一系列研究。具體來說,非直視目標位置信息的獲取大體可以分為兩類:多徑積累和多徑分離。其中,前者主要利用多通道雷達獲取的多徑信息進行成像從而獲取目標位置信息;而后者則從回波層面將距離或者時間信息與其對應的多徑匹配再進行定位處理。通常這兩類方法均要求建筑布局先驗已知,從而結合場景信息進行輔助定位。
4.2.1 基于多徑積累的非直視目標成像方法
此類方法主要將多通道雷達獲取的多徑信息在圖像域進行融合/積累,從而提取出目標的位置。其無需將多徑回波峰值和電磁波理論傳播路徑對應,避免了部分路徑缺失導致的定位錯誤問題。
目前,應用在非視距目標探測領域的主流成像算法是后向投影(Back-Projection,BP)算法[36-44],其他的成像方法還包括:時間反轉成像算法(Time Reversal,TR)[45-47]、合成孔徑波束形成算法[48]、層析成像算法[49]等。
電子科技大學的Li等人[36]利用多發多收(Multiple Input Multiple Output,MIMO)雷達構建多徑成像字典,對不同路徑的多徑成像字典進行融合得到目標圖像。具體來說,在建筑布局已知的情況下,首先通過鏡面反射構建虛擬雷達,接著構建不同路徑的多徑成像字典,最終對不同成像結果進行非相干融合,進而得到僅保留真實目標的雷達圖像。然而上述方法使得多徑能量聚焦的同時也導致部分雜波能量匯集,此外,擴展目標也會引起距離像展寬,這些均致使圖像在非目標處亦積累出較高值,為真實目標的位置提取造成困擾。為此,Fan和Li等人[37-39]提出基于圖像域多徑鬼影關聯的多目標定位方法。與之前工作不同的是,該方法利用傳統BP算法進行成像,所得到的圖像中均為多徑信號產生的鬼影目標。隨后通過匹配的方式從其中篩選出真實目標位置所對應的一次多徑鬼影,進而基于一次多徑鬼影位置與真實目標位置鏡像對稱的關系實現定位,如圖8所示。基于類似的原理,成都理工大學的Tang等人[40,41]將該方法用于單發單收(Single Input Single Output,SISO)雷達,通過鏡面對稱構建了虛擬陣列,從而解決了單通道雷達無法成像的問題。與多通道BP算法類似,上述方法會使多徑能量在其他位置聚焦,從而產生較多鬼影,為此,Yang等人[42]提出了雙視角觀測方法,基于不同視角下多徑鬼影分布的差異性,通過圖像融合的方法抑制了多徑鬼影,實驗場景及結果如圖9所示。
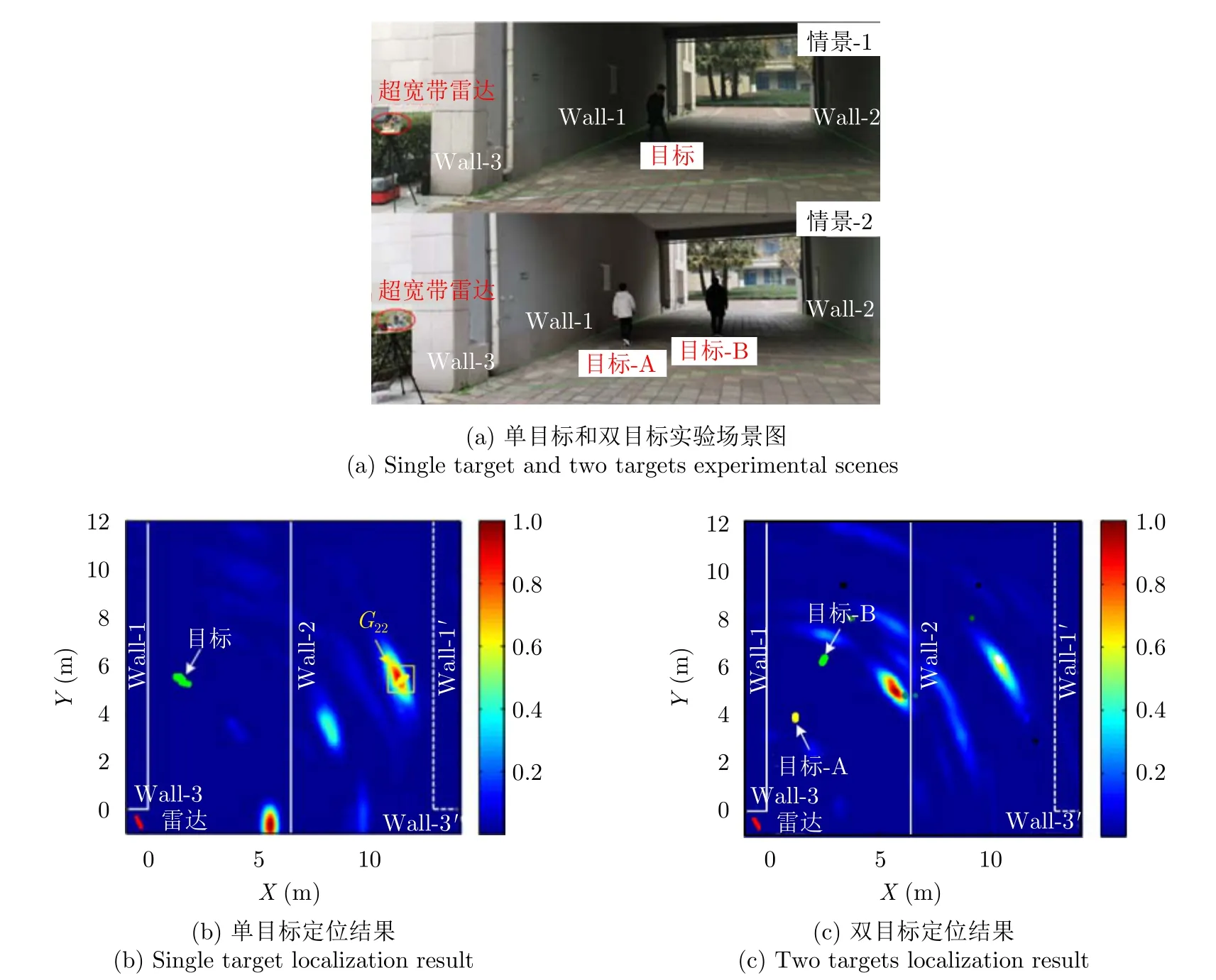
圖8 基于多徑鬼影空間位置匹配的非直視目標定位方法實驗場景及實驗結果[38]Fig.8 Experimental scenes and results of NLOS target localization method based on multipath ghost spatial position matching[38]
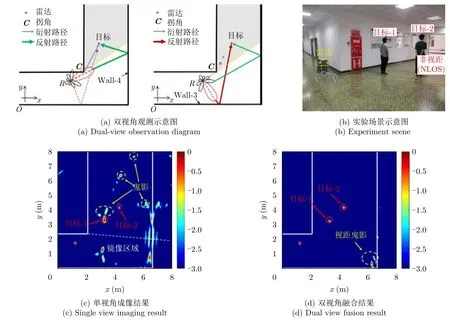
圖9 基于雙視角觀測的單通道雷達非直視目標定位方法實驗場景及實驗結果[42]Fig.9 Experimental scenario and results of NLOS target location detection based on dual-view observation with signal channel UWB radar[42]
采用類似于BP成像算法的思想,國防科技大學的Du等人[43]提出了一種基于網格匹配的目標定位算法。該算法基于多徑傳播模型計算每個網格點的到達時間并匹配最接近往返多徑到達時間,實驗證明,當傳播路徑數大于5條時,該算法具有較好的定位性能,測距誤差小于3 m。然而,該方法對回波信號的質量要求極高,且建筑布局位置偏差會直接影響目標定位的準確性,如圖10所示。除此之外,電子科技大學的Fan等人[44]提出了一種基于BP成像算法的墻壁位置估計算法。根據BP成像聚焦區域的對稱特性、旋轉陣列,獲取不同墻面位置,并基于此求解出目標的真實位置。圖11展示了該算法的實驗結果。
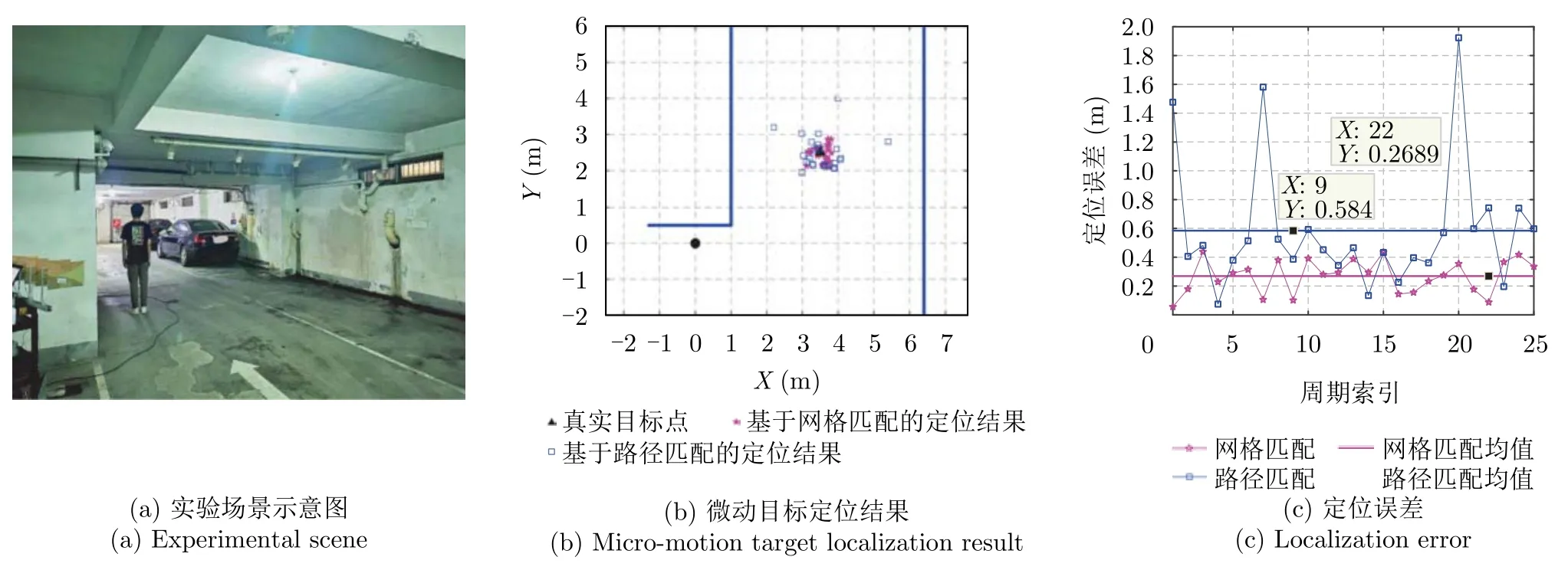
圖10 基于網格匹配的非視距目標定位方法實驗場景及實驗結果[43]Fig.10 Experimental scene and results of NLOS target localization method based on grid matching[43]
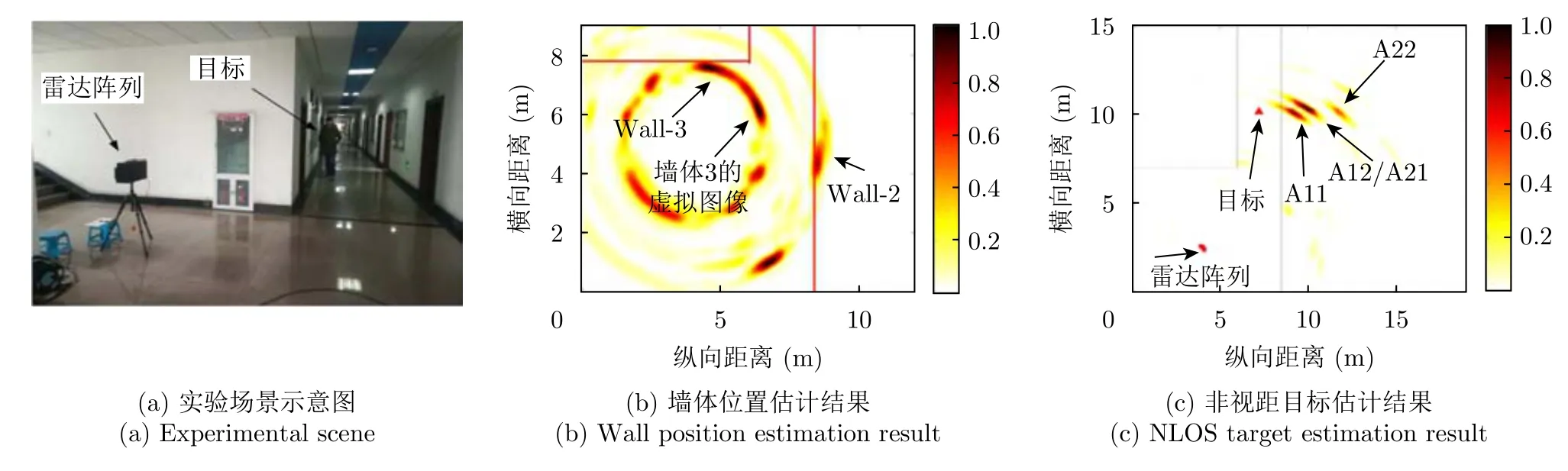
圖11 基于墻體位置估計的非視距目標探測方法實驗場景及實驗結果[44]Fig.11 Experimental scenes and results of NLOS target detection method based on wall position estimation[44]
與上述基于BP成像的非視距目標成像算法不同,日本京都大學的Fujita等人[45-47]基于TR和干涉測量法,提出了一種室內環境非直視目標成像算法,可估計得到目標的形狀。此外,該算法利用TR得到的近似目標位置以及估計回波在數據空間的傾角,去除了大部分的圖像假點。此外,2013年,AFRL的Setlur等人[48]在傳統合成孔徑波束形成算法基礎上,提出了兩種多徑利用方法。第1種方法利用點擴散函數對傳統波束圖像進行處理;第2種方法利用復合擴散函數直接從原始回波信號中提取出目標距離信息,降低了多徑引起的虛警。仿真結果表明,利用這兩種成像方法均能實現對非直視目標準確定位,如圖12所示。同年,意大利那不勒斯費德里克二世大學的Gennarelli等人[49]提出了一種二維層析成像方法,該方法結合了線性逆散射模型和時域有限差分(Finite Difference Time Domain,FDTD)方法。提出的方法可提供良好的聚焦圖像而不受多徑鬼影影響。這種方法利用多徑信號改進了橫向距離分辨率并且可以探測非直視區域的目標。瑞典國防研究局的Gustafsson[50]在探測場景布局信息已知的前提下,基于幾何光學方法和衍射分量計算出探測場景的參考信號,將其與目標后向散射信號進行相關,得到了隱蔽目標的圖像。
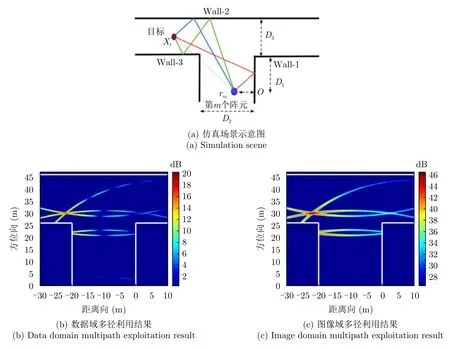
圖12 基于波束形成的數據域和圖像域非視距目標成像算法仿真場景及仿真結果[48]Fig.12 Simulation scene and simulation results of imaging algorithm for NLOS targets in data domain and image domain based on beamforming[48]
美國亞利桑那州立大學Doddalla等人[51]通過一種后向傳播SAR成像算法驗證了太赫茲波(Terahertz,THz)的非視距成像能力。然而,該方法僅適用于尺寸較小的環境,無法適應更為復雜的大尺度場景。電子科技大學的Wen等人[52]則利用毫米波雷達(Millimeter Wave,MMW),提出了一種非視距逆合成孔徑雷達(Inverse Synthetic Aperture Radar,ISAR)成像算法,實現了對遮蔽動目標的高分辨成像,該算法對飛機模型的成像結果如圖13所示。受SAR啟發,Wei等人[53]提出了一種有效的基于MIMO毫米波雷達的2D NLOS成像技術。該方法通過MIMO天線掃描合成二維虛擬天線陣列,利用多反射回波獲得二維NLOS成像。在此基礎上,提出了一種基于鏡面對稱反投影(Mirror Symmetry Back-Projection,MSBP)的非視距回波二維高精度聚焦算法,成像結果如圖14所示。
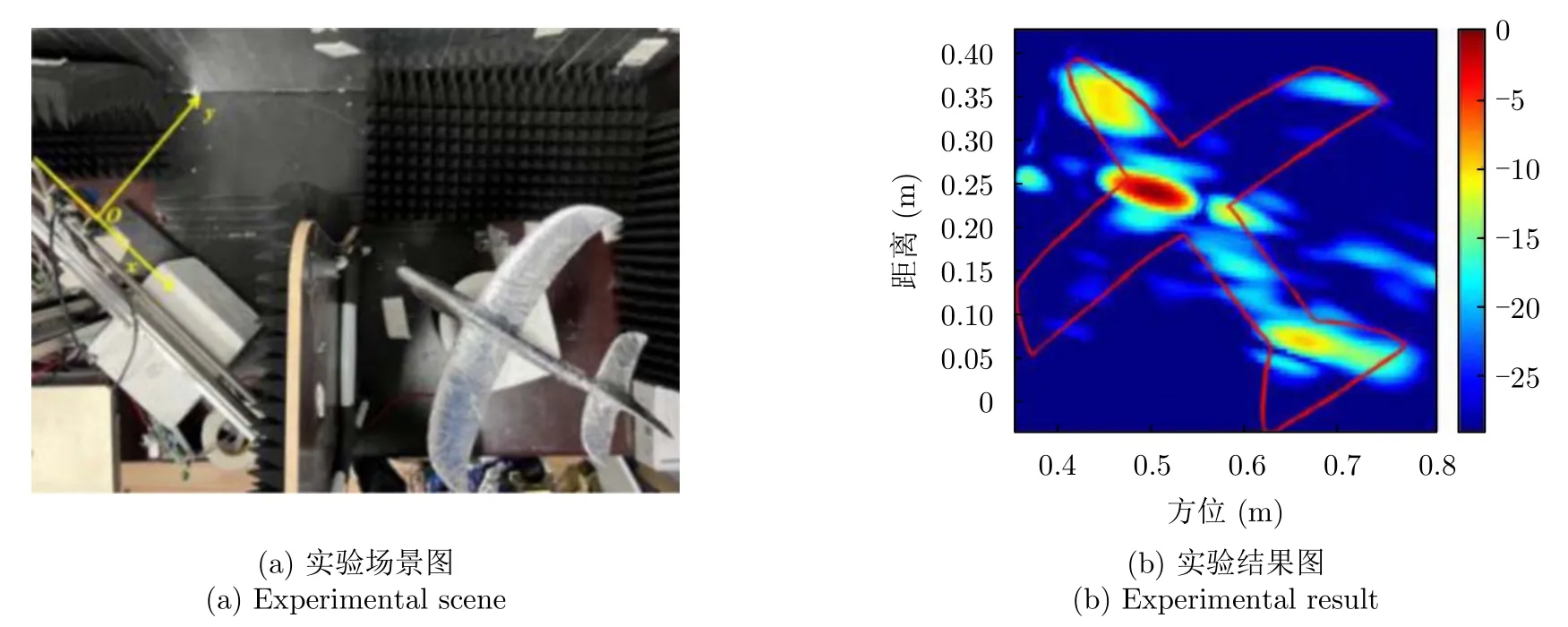
圖13 基于RMA的非視距動目標高精度成像方法實驗場景及實驗結果[52]Fig.13 Experimental scene and result of high-precision imaging method for NLOS moving target based on range migration algorithm[52]
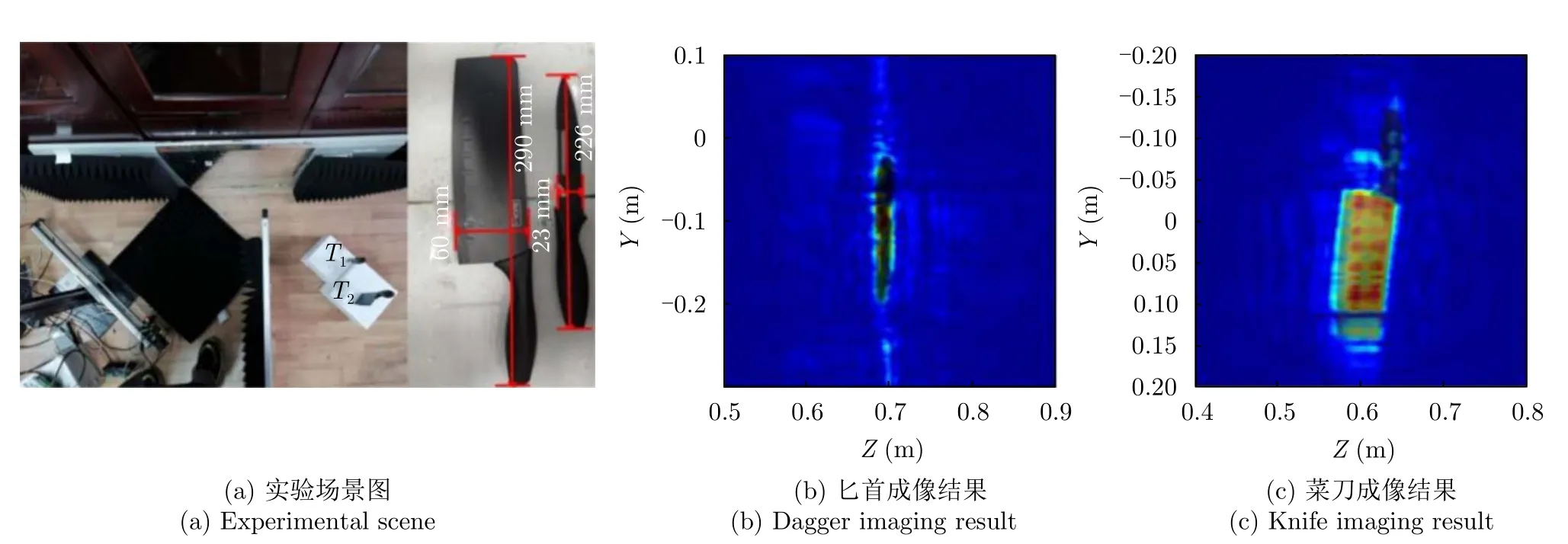
圖14 基于鏡面對稱反投影的非視距二維高精度成像算法實驗場景及實驗結果圖[53]Fig.14 Experimental scenes and results of NLOS 2D high-precision imaging algorithm based on MSBP[53]
4.2.2 基于多徑分離的非直視目標定位方法
此類方法主要將回波中的不同多路徑信號識別出來,從而借助其攜帶的時間信息或多徑信號之間的關聯性進行非直視目標定位。
2012年德國伊爾瑪瑙理工大學的Zetik等人[54]率先提出了一種基于多徑反射幾何關系的非直視目標定位算法。具體而言,該算法在場景布局先驗和目標橫坐標已知的前提下,從距離像中識別并提取出非視距目標一次多徑反射所對應的距離值,再借助一次鏡面反射的幾何對稱關系,實現了對于L形建筑拐角場景中水平運動的非直視目標定位。然而,僅憑一次多徑反射的幾何關系無法推算出目標的二維坐標。針對該問題,瑞典國防研究局的Johansson等人[55]采用一種X波段窄波束掃描雷達系統,利用一次和二次鏡面反射實現了拐角后非直視目標的定位。仿真結果表明,在已知場景幾何結構的情況下,該系統可探測距離拐角8 m遠的目標,實驗結果如圖15所示。
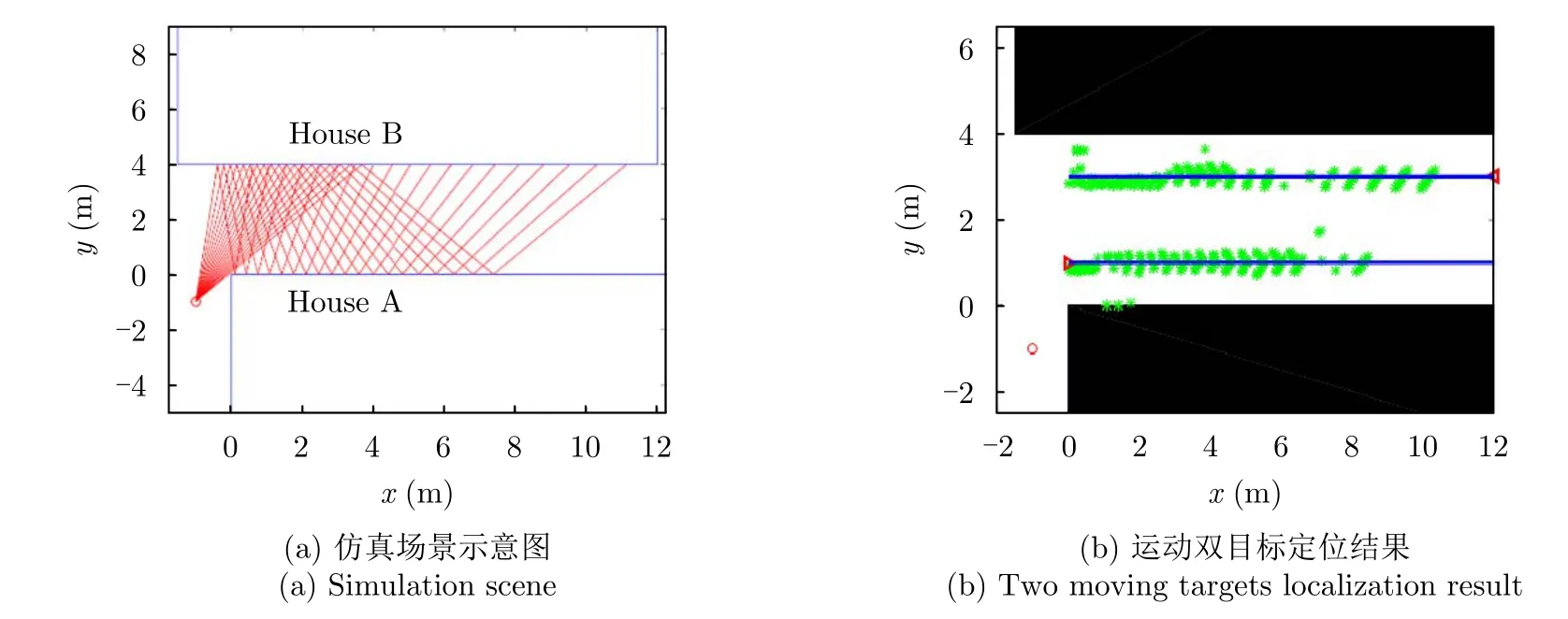
圖15 X波段窄波束掃描雷達非視距目標定位仿真場景及仿真結果[55]Fig.15 Simulation scene and simulation result of NLOS target localization for X-band narrow-beam scanning radar[55]
除了盡可能多地使用多路徑反射,進而解算出目標二維位置,還可以將一次多徑反射對應的距離值和到達方向(Direction Of Arrival,DOA)估計結合起來。電子科技大學的Zhao等人[56-58]基于毫米波雷達波束窄、角分辨率高的特性,在得到一次反射多徑所對應的距離值后,再利用比相法得到其對應的角度,由此得到目標的鏡像位置,進而結合對稱特性獲取得到目標的真實位置,其實驗場景及結果如圖16所示。除了比相法,北京航空航天大學的Wei等人[59]利用多信號分類方法(MUltiple SIgnal Classification,MUSIC)以實現多徑信號角度測量。此外,其還提出了一種新的非視距運動目標檢測方法。該方法采用多項式擬合方法抑制靜態噪聲,采用距離門控方法濾除了NLOS目標范圍之外的距離門噪聲,有效提升了非視距目標的檢測概率。與之不同,國防科技大學的Du等人[60]利用合成雙基毫米波雷達提出了一種新的非直視目標定位算法。其原理是聯合處理雷達位于不同位置時一階反射所對應的到達時間(Time Of Arrival,TOA),再結合場景布局信息即可實現角度的計算,從而避免了由隨機相位引起的DOA估計不精確的問題。但是該方法準確定位的前提是目標在兩次測量期間位置不變。而中國科學技術大學的Li等人[61]則通過旋轉雷達角度的方式獲取了多路徑對應的角度信息。值得一提的是,其進一步通過對不同距離單元的不同多徑回波信號進行提取,從而實現了非視距區域靜止人體目標呼吸速率的準確估計。而電子科技大學的Chen等人[62]則利用L波段雷達測量角度信息,并結合TOA信息實現了多路徑的識別。具體來說,該方法首先利用矩陣束算法估計得到不同多路徑對應的TOA,再通過最小方差無畸變響應波束形成(Minimum Variance Distortionless Response,MVDR)算法估計得到回波的角度,進一步地,基于匹配的思想實現了測量TOA和理論多徑的配對,進而確定了真實目標的位置,其實驗場景及結果如圖17所示。

圖16 基于比相測角的非視距目標定位方法實驗場景及實驗結果[58]Fig.16 Experimental scene and result of NLOS target localization method based on phase comparison angle measurement[58]
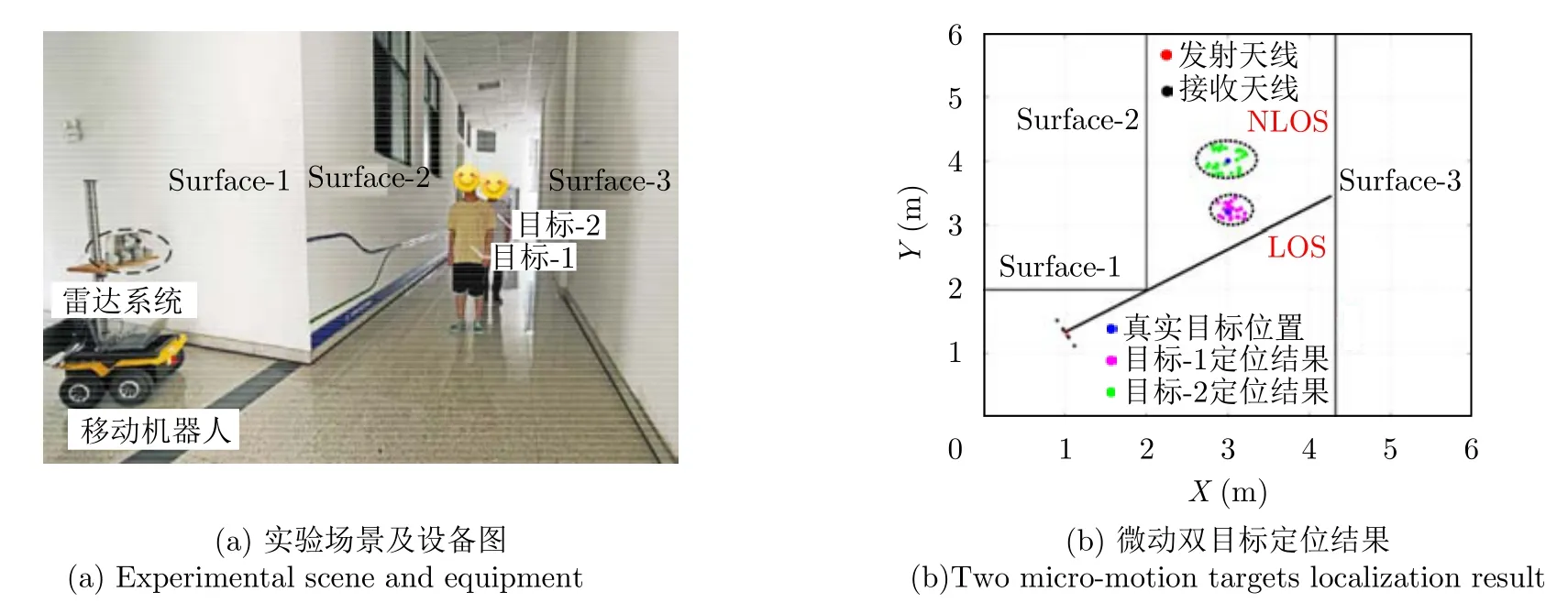
圖17 基于角度和距離的多徑識別非視距目標定位方法實驗場景及實驗結果[62]Fig.17 Experimental scene and result of multipath identification of NLOS target localization method based on angle and range[62]
而對于單建筑拐角場景而言,由于缺乏反射面,利用鏡面反射的幾何關系求解目標位置的方法不再適用。為此,電子科技大學的Li等人[63,64]針對電磁波在單建筑街角場景下的非視距傳播情況進行了分析,建立了電磁波衍射-墻面反射組合傳播模型,并基于UWB雷達采集的街角后隱蔽目標回波距離像結果驗證了該模型的正確性。與之類似,國防科技大學的Du等人[65]也基于同樣的傳播模型實現了單建筑非視距目標定位,并通過數值模擬分析了多徑衍射特性,為有效利用衍射信號提供了理論指導。
2015年,德國伊爾瑪瑙理工大學的Zetik等人[66]利用單發單收UWB雷達,基于平行閾值檢測器與全局最近鄰(Global Nearest Neighbour,GNN)算法實現了多徑回波與物理傳播路徑的對應,再通過求解衍射和一次反射對應的軌跡方程交點,實現對L形場景中非直視目標的定位。
值得一提的是,文獻[66]首次提出了非視距區域的劃分方案,區域劃分模型如圖18所示,衍射路徑的理論覆蓋區域是整個走廊,然而根據均勻衍射理論,衍射到非視距區域的電磁波具有較少的功率,因此,將衍射的覆蓋區域限制為三角形區域CRD。依據射線追蹤模型,連接雷達A和拐角C的直線AR是視距與非視距區域的邊界,該路徑的鏡面反射路徑RT是一次反射的邊界,因此反射的覆蓋區域被規定為三角形區域CRT。
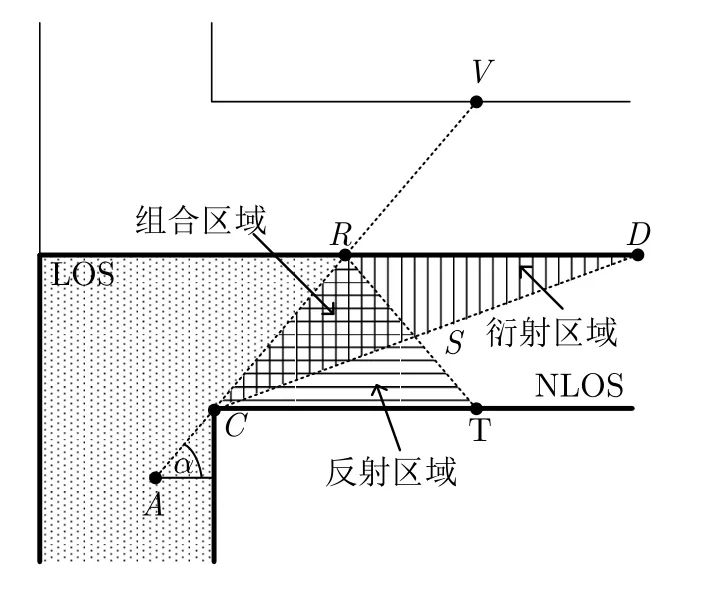
圖18 非視距區域劃分[66]Fig.18 NLOS area division[66]
電子科技大學的Wu等人[67]實現了更為復雜的U形非視距場景中的目標定位。首先分析了電磁波在該場景中的傳播模型,并提取構建了5類主要的電磁傳播路徑。利用橢圓交叉的方法獲得了鏡像目標位置,再基于場景中鏡面反射的幾何關系校正得到目標的真實位置。
但是上述方法僅提取利用傳播距離較短的多徑,無法很好地應對多路徑缺失的情況。為此,電子科技大學的Fan等人[68,69]則主要基于峰值匹配的思想識別出多徑回波中幅值最強的兩峰值對應的物理傳播路徑,進而通過求解其軌跡方程對應的橢圓交點實現目標定位,實驗場景及定位結果如圖19所示。國防科技大學的Wu等人[70-72]利用收發分置的多基地雷達提出了一種基于鏡面定位的非直視目標定位方法。該算法通過構建虛擬鏡像發射天線,將非直視問題轉化為視距問題,再利用TOA技術對拐角后隱蔽目標進行定位,這一方法本質上依然是橢圓交叉定位算法。其實驗場景及定位結果如圖20所示。然而,基于橢圓交叉的定位方法需要精確判別多徑回波中峰值所對應的物理傳播路徑以構造正確的軌跡方程。此外,目標的擴展往往會導致獲取的多徑回波峰值和理論值存在偏差,進而影響軌跡方程交點的求解。因此,該方法的定位魯棒性較低。
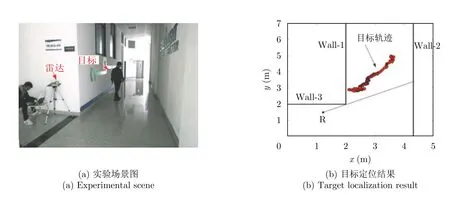
圖19 基于TOA匹配的目標定位方法實驗結果[68]Fig.19 Experimental result of target localization method based on TOA matching[68]
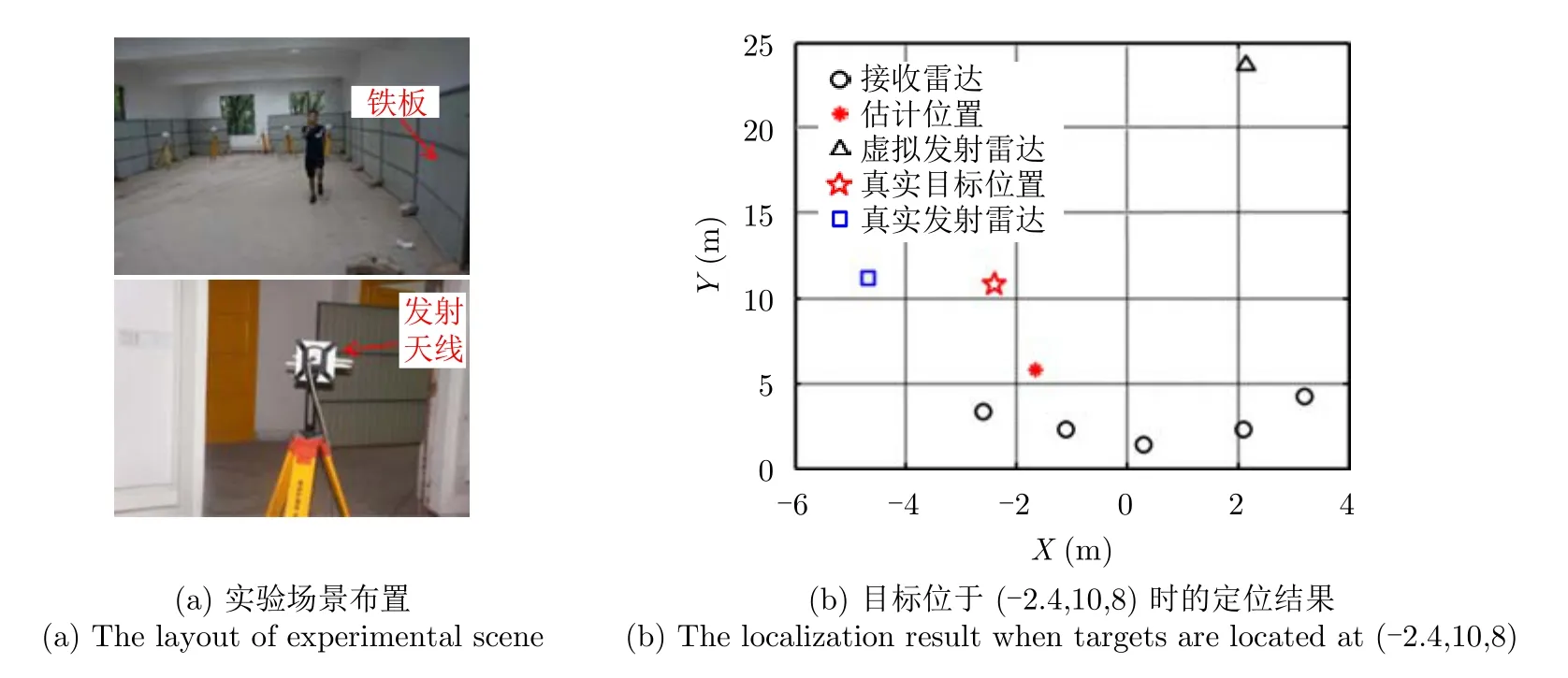
圖20 基于鏡像目標定位方法實驗結果[70]Fig.20 Experimental result based on the mirror target localization method[70]
結合TOA信息與深度學習網絡,國防科技大學的Ding等人[73]提出了一種利用多徑到達時間關聯的單站雷達兩階段定位方法。在離線階段,生成不同位置的參考TOA數據;在線階段則通過稀疏重建方法估計來自目標的多徑回波TOA集合。然后基于有限集統計理論,提出了一種基于網絡的多觀測數據關聯算法作為給定候選位置的多徑測量似然函數,進而利用MLE得到目標位置。
4.2.3 其他非直視目標二維定位方法
除了上述多徑利用技術外,還有兩種非直視目標二維定位技術。一種利用原始信號,基于假設檢驗構造了多徑匹配濾波器,以實現非視距目標的檢測和估計;另一種則聚焦于非視距場景布局信息未知的情形。本節將介紹這兩種技術。對于前者,法國航空航天實驗室的Thai等人[74]構建了典型街區拐角場景中多徑信號傳播模型,利用毫米波雷達,在場景布局已知的前提下,提出一種基于多徑匹配濾波器(Multipath Matched Filter,MPF)的建筑拐角隱蔽目標定位算法,并利用實測數據驗證了該算法的有效性,實驗場景及定位結果如圖21所示。
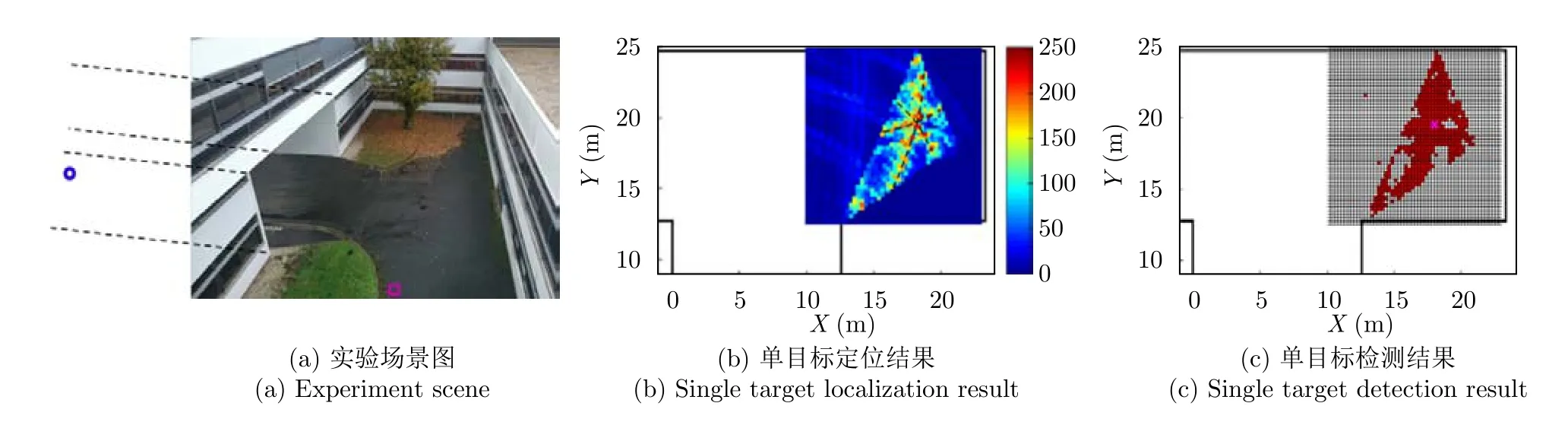
圖21 基于子空間匹配濾波器的遮蔽目標定位方法實驗場景及實驗結果[74]Fig.21 Experimental scene and results of conceal target localization method based on subspace matching filter[74]
2019年,Thai等人[75]又提出了一種基于平方律組合器(Square Law Combiner,SLC)的非直視目標定位方法。然而上述兩種方法的性能都取決于所選取的路徑數,且當路徑數過多時,定位結果中會殘余由多徑回波強模糊引入的虛假目標。為了解決這一問題,該團隊[76]利用非直視目標位置與不同多徑時延的非線性關系,將廣義似然比(Generalized Likelihood Ratio Test,GLRT)粒子濾波器用于非直視目標位置估計,該方法通過重要密度函數對目標狀態和多徑幅值分別進行了采樣。其目標定位精度較高,但仍未解決其他多徑帶來的模糊問題。
現階段大部分非直視目標探測方法可用的前提是場景信息先驗已知或場景布局相對簡單規則,這對多徑目標探測技術在實際中的應用產生了較大的限制。為此,電子科技大學的Wu等人[77]基于不同類型的多徑信號成像結果的幾何分布特征,提出了一種基于多假設檢驗理論的非視距目標定位方法,實現了對非視距場景通道寬度和遮蔽目標位置的聯合估計。更進一步地,該單位的Chen等人[78]實現了非視距建筑場景的墻體夾角和目標二維位置信息的聯合估計。具體而言,首先將建筑物布局簡化為參數未知的組合線性方程組,根據多徑傳播模型,將其應用于圖像重建與布局估計問題。然后提出形狀重構組稀疏約束算法,并結合粒子群優化方法,同時實現了場景布局和隱藏目標重建任務,其實驗場景及結果如圖22所示。
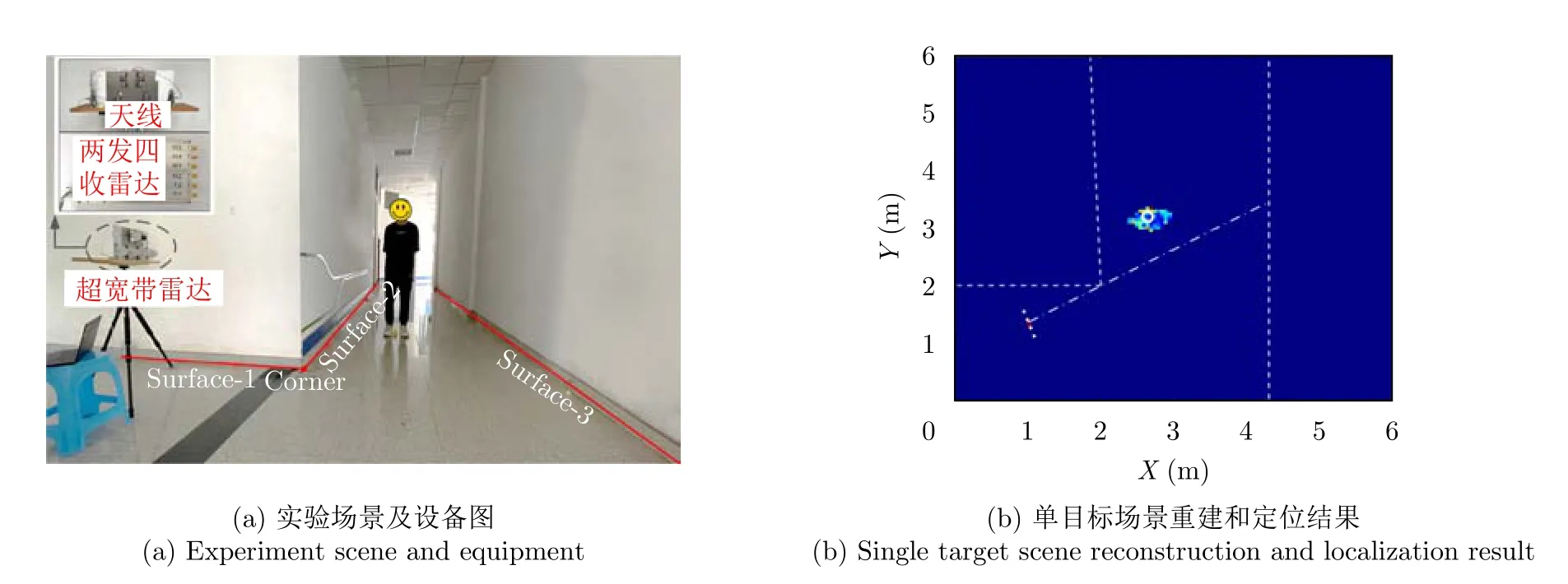
圖22 基于稀疏度驅動的建筑布局和目標位置聯合估計方法實驗場景及實驗結果[78]Fig.22 Experiment scene and joint estimation of NLOS building layout and target via sparsity-driven approach[78]
4.3 非直視目標三維信息獲取
在實際應用中,除了需要知道目標在二維坐標系中的位置,往往還希望得到目標的高度信息,以獲取目標的動作姿態等人體行為特征。為此,電子科技大學的Liu等人[79]基于MIMO毫米波雷達,利用場景稀疏性和反射面的鏡面散射特性,提出了一種基于貝葉斯壓縮感知稀疏重建和反射面投影的NLOS三維雷達成像方法。Wei等人[80]基于MIMO毫米波雷達,以時域相干完整性消除了非主路徑回波的影響。在不需要其他傳感器如激光雷達(Light Detection And Ranging,LiDAR)等輔助手段的情況下,通過LOS信號感知反射面,通過二維切片成像提取反射面,利用鏡像對稱獲得盲區目標的三維信息,如圖23所示。
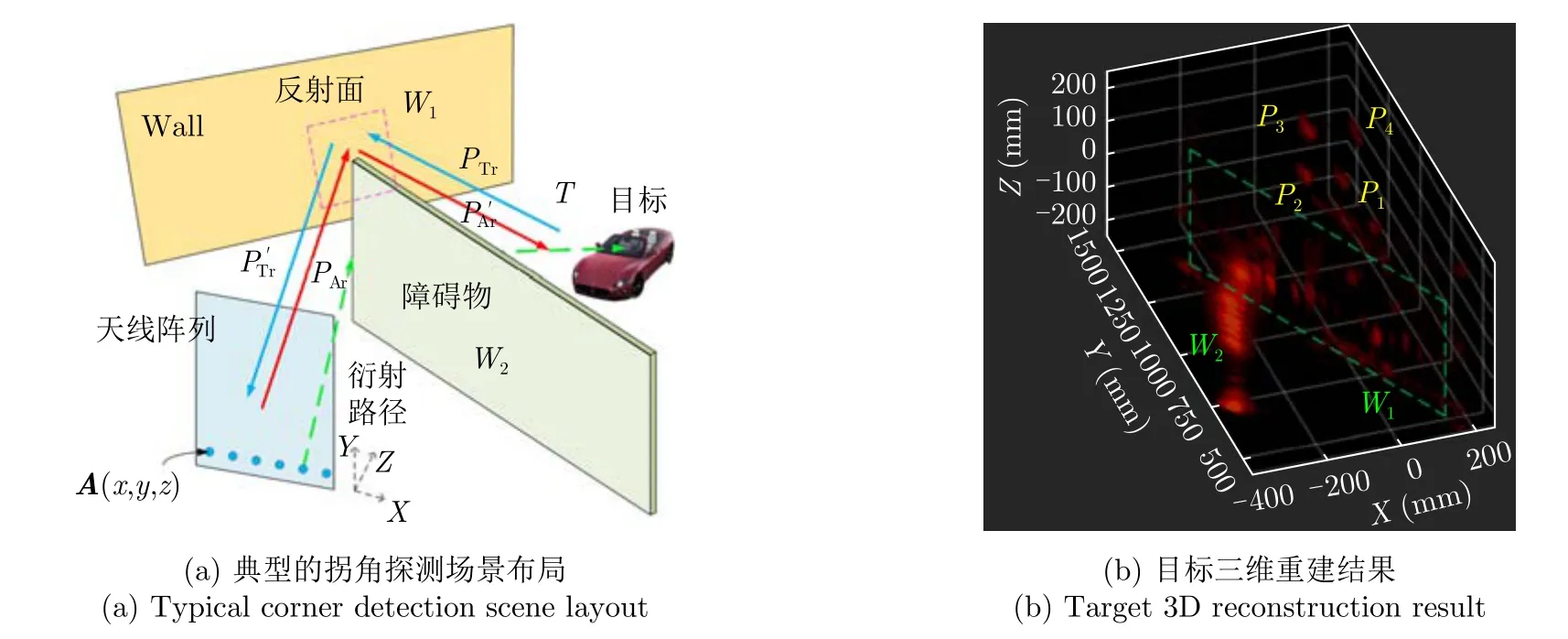
圖23 基于毫米波雷達的三維MSBP重建算法實驗結果[80]Fig.23 Experimental result of 3D MSBP reconstruction algorithm based on millimeter wave radar[80]
除此以外,美國亞利桑那州立大學的Cui等人[81,82]提出一種基于太赫茲雷達的NLOS目標三維重建技術。該技術利用鏡像折疊的方法校正原始成像數據,實現了非視距目標厘米級的三維高精度重建。如圖24所示,其中重建圖像的水平橫截面展示了成像結果,重建圖像垂直橫截面顯示了人體模型的幾何形狀和姿勢。
4.4 新型非直視目標探測方法
針對現有方法僅適用于一次、二次等小范圍非視距區域,且探測性能受墻體等反射面粗糙度影響較大等問題,芬蘭坦佩雷大學的Solomitckii等人[83-85]在拐角區域引入了被動反射器,從而輔助電磁波進行更好的反射,反射面模型如圖25所示。
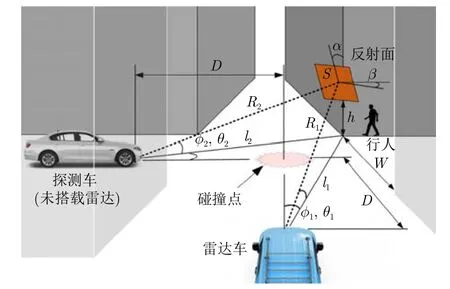
圖25 基于被動反射面的非視距車輛探測方法示意圖[84]Fig.25 The graph of NLOS vehicle detection method based on passive reflector[84]
此外,該團隊還通過分析推導簡化了車輛模型的雷達截面積(Radar Cross Section,RCS),確認了保險杠是檢測車輛的重要區域,并研究了后向散射功率與反射器空間方向的關系。但是這一探測方案有可能導致同信道干擾,從而限制其發揮作用。而意大利那不勒斯大學的Aubry等人[86]則將可重構智能面(Reconfigurable Intelligent Surfaces,RISs),即智能反射面應用在了NLOS目標探測領域,模型如圖26所示。與被動反射面僅提供一種較為理想的反射面不同,RIS是人造數字可控元表面,能夠通過適當的電子控制改變入射信號的電場分布。因此,當雷達將電磁波輻射聚焦于特定的RIS上時,通過適當的設置RIS參數即可改變電磁波傳播方向,進而實現對于非視距區域的掃描。與上文引入輔助反射面以擴大非視距覆蓋范圍、提升多徑信號能量不同,美國加利福尼亞大學圣迭戈分校的Woodford等人[87]則將實際城市場景中存在的物體用作中繼反射面,并基于MOSAIC(一種集成LiDAR和雷達的傳感器套件)研究了如何使雷達通過非平面、非理想反射面實現拐角目標探測,統計分析了不同中繼反射器(例如,不同材質的墻體、電線桿、行道樹、不同車輛等)的反射特性。實驗結果表明,通過考慮非平面反射器和非對稱雙程路徑使得探測系統的非視距覆蓋范圍至少擴大30%。
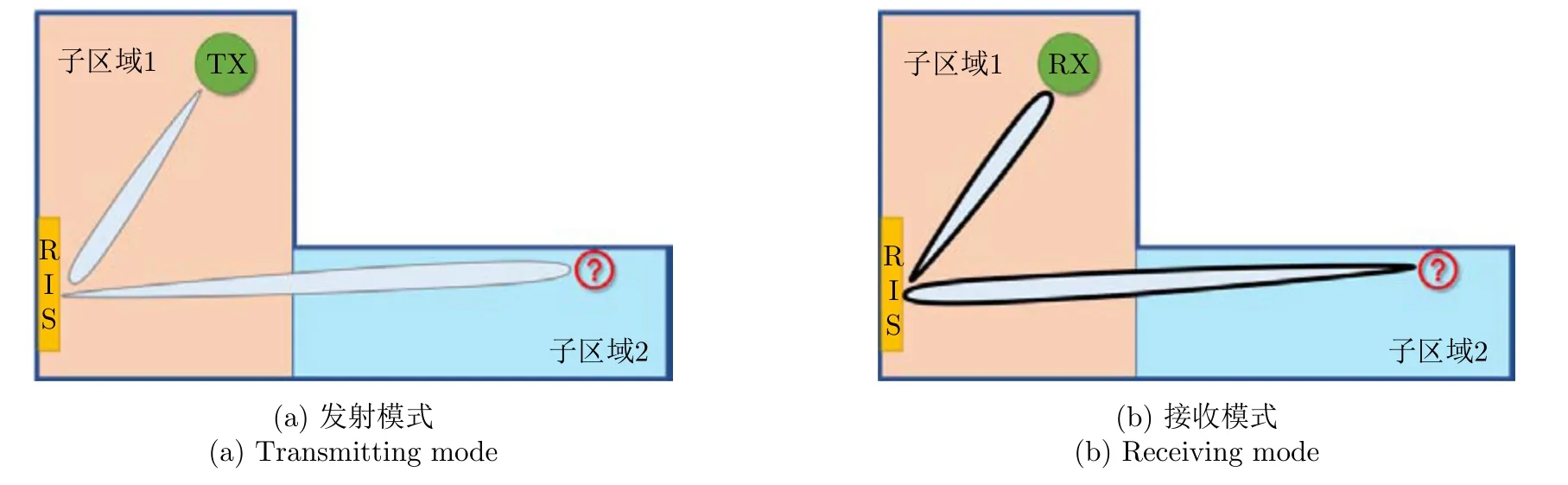
圖26 基于RISs的非視距區域探測示意圖[86]Fig.26 NLOS region detection diagram based on RISs[86]
除了從中繼反射面的維度開展研究,Rezvani等人[88]則在雷達系統方面進行了創新,將一種稀疏、寬孔徑多波段雷達應用于NLOS目標探測領域,該雷達系統可結合高頻段和低頻段的各自優勢,獲得比單頻段更好的非視距目標探測性能。
此外,隨著深度學習的發展,神經網絡也被引入這一領域。2022年,美國麻省理工學院的Yue等人[89]提出了基于射頻跟蹤的非直視目標定位方法。首先根據射頻信號在復雜建筑環境中的傳播規律建立場景提示圖,然后將復雜建筑場景提示圖與采集的遮蔽目標回波信號送入卷積神經網絡(Convolutional Neural Network,CNN)進行匹配訓練,進而得到目標位置。其中,提示圖是一種描述射線追蹤和直接傳播路徑如何在特定環境下工作的編碼方式。實驗結果表明該定位技術的誤差僅為傳統方法的1/12~1/3,實驗結果如圖27所示。梅賽德斯奔馳公司的Scheiner等人[90]提出一種基于人工神經網絡的非視距目標檢測和跟蹤方法,并在實際道路環境中驗證了算法的有效性,如圖28所示。
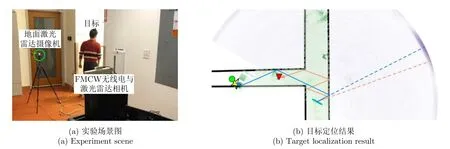
圖27 基于CNN的射頻跟蹤非直視目標定位方法實驗場景及實驗結果[89]Fig.27 Experimental scene and result of the method of RF tracking NLOS target location based on CNN[89]
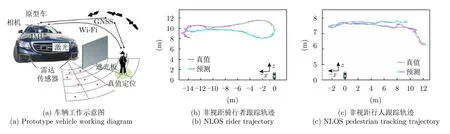
圖28 基于人工神經網絡的多普勒雷達非視距目標定位跟蹤方法原型車及實驗結果[90]Fig.28 Prototype vehicle and experimental results of Doppler radar NLOS target location and tracking method based on artificial neural network[90]
5 總結與展望
本文對多徑利用雷達目標探測領域的發展情況進行了簡要的梳理。從基于空中平臺的多徑探測技術到基于地面平臺的多徑探測技術,從非直視目標探測的可行性研究到實現非直視目標檢測、定位、成像及識別,在探測平臺和處理方法等方面都取得了許多振奮人心的成果。從現有結果來看,目前多徑利用雷達僅研究了典型環境下的多徑回波信號模型,其他復雜建筑環境尚未考慮,且只分析了場景中存在的鏡面反射,忽略了場景中存在的漫反射以及散射等電磁傳播特性。同時,準確的環境信息是實現非視距目標精確定位的前提,然而現階段大部分研究均假設場景信息先驗且布局相對規則,因此,如何通過多徑利用雷達實現環境信息獲取是目前研究的一大挑戰。此外,現有多目標定位方法尚未探討目標間的干擾問題,例如目標的相互遮擋及電磁波在目標間的多次反射等問題,這無疑會對實際場景中的多目標定位造成影響。綜上,多徑利用雷達技術在實際應用中尚存諸多問題和挑戰,亟待進一步分析和研究。
從本文的梳理結果來看,雖然國外在該領域的研究起步早于國內,但在國內研究人員的努力之下,也涌現出了很多新穎的探測方法。不過也應該注意到,國內在該領域的創新依然弱于國外。具體地,就理論層面而言,國外學者研究匯總了反射面的材質、粗糙度以及形狀對于多徑信號反射的影響,而國內對此類影響因素的研究分析較為匱乏;就方法層面而言,國外學者的探測系統涵蓋了L波段到THz波段,并引入了被動反射面和智能反射面輔助定位,而國內的研究則主要集中于L波段和毫米波波段,且主要依靠場景自身反射面輔助定位;就算法層面而言,國外學者率先研究了檢測和機器學習、深度學習在多徑利用雷達中的應用,國內對此方面的研究起步較晚。但是隨著越來越多的研究人員對這一領域的持續關注,我們有理由相信,未來國內在該領域的研究將可能取得非常顯著的突破。
多徑利用雷達目標探測技術有著廣闊的應用前景與研究價值,結合目前的發展情況與應用需求來看,一些可能的發展趨勢是:
(1) 探測平臺將更加多樣化,特別是結合當前自動駕駛、無人機等技術的發展,未來的多徑探測會具有更高的空間探測自由度和更廣闊的應用領域,所捕獲到的多徑信號將更加復雜多樣,這對多徑信號的識別和利用技術提出了更高的要求;
(2) 多種探測技術的融合將提高多徑探測性能,現有的技術將有可能相互融合以獲得效果更佳的探測性能,此外,越來越多傳統直視雷達的探測方法將應用于非直視場景,為解決非直視目標探測問題提供新思路;
(3) 可探場景將更加豐富,目前多徑利用雷達目標探測技術大多局限于固定場景,未來可借助智能反射面等相關技術,有望突破現有技術對建筑固定反射面的依賴,從而縮小雷達探測盲區,提升雷達在城市環境中的覆蓋范圍,實現對多類型復雜環境的探測;
(4) 多種類目標識別,現有多徑利用雷達目標識別技術大多依賴于研究人員經驗選取,而深度學習具有自動提取特征及任務泛化能力,通過科學合理的設計能夠實現高效、普適的多種類目標識別,未來利用人工智能方法解決非直視目標識別問題也將成為研究熱點。
利益沖突所有作者均聲明不存在利益沖突
Conflict of InterestsThe authors declare that there is no conflict of interests
猜你喜歡
中等數學(2022年2期)2022-06-05 07:10:50
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小學生學習指導(低年級)(2020年6期)2020-07-25 02:31:36
小學生學習指導(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
電子制作(2018年11期)2018-08-04 03:25:42
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34