基于STPA 方法的無人機空戰態勢分析與戰術優化
2024-01-26 03:18:22魏瀟龍甘旭升
指揮與控制學報 2023年6期
關鍵詞:優化
劉 影 魏瀟龍 屈 虹 甘旭升
無人作戰飛機必然是未來空戰場上的主要作戰力量,實現其空戰決策的自主與智能化是當今世界各軍事強國爭相研究的主要方向[1].但空戰機動的決策必須要以空中態勢的準確判斷為基礎,若態勢判斷產生偏差,或準確率不高,則必然導致決策準確性降低,在連續的決策序列中逐漸失去有利態勢,并被敵機擊落.隨著航空武器彈藥、機載電子干擾設備、航空通信技術性能的不斷提升,UAV 與其他武器平臺的協同作戰樣式變得更為豐富,但這也進一步加劇了態勢的判斷難度,使得自主決策技術的實現變得更為困難[2].
文獻[3-4]在對UAV 空戰機動決策展開研究過程中,對態勢的分析都采用了最為基礎的相對位置判別方法,即依據相對距離、角度、高度、速度來判斷敵我雙方之間的態勢關系,并以此作出目標分配與機動決策,但未對戰術優化進行進一步分析.文獻[5]使用灰主成分指標約簡模型構建空戰目標威脅評估模型,可支持空戰的快速決策,但評估對象僅局限于目標分析,對于戰術效果的影響有限.文獻[6-7]基于猶豫模糊集(hesitant fuzzy set,HFS)理論對空戰態勢因子進行評估排序,但該方法對戰術的優化未展開進一步研究.文獻[8]提出一種使用神經網絡學習的方法實現空戰態勢的自動評估,但該類方法會受樣本條件制約,且多機條件下的學習量會呈爆炸式增長.文獻[9]對UAV 空戰態勢評估問題進行了綜述,認為主要包括基于空戰數據的態勢時序參數分割聚類、態勢函數權重優化、空戰態勢評估模型建立等問題,但該研究并沒有開展具體的定量研究和仿真驗證.文獻[10]基于系統理論混合式分析(systems theoretic process analysis -traffic organization and perturbation analyzer,STPA-TOPAZ)方法對UAV 低空運行條件下的風險狀況展開評估,可用于優化UAV 之間的自主避讓機動決策性能,具有一定參考價值.文獻[11]則使用STPA 方法對空中加油過程展開建模分析,通過控制過程建模實現了安全性的優化.
從國內外有關UAV 空戰態勢評估的研究來看,重點關注內容為各類評價因子的排序以及如何為后續的決策提供信息支持,實際上是一種態勢信息的自動認知,但仍未建立起滾動優化的評估體系.在安全評估領域,尤其關注風險的評估與優化過程,注重回路的形成與迭代更新過程.本文借鑒經典的安全分析模型,對UAV 空戰機動控制過程展開建模,通過對敵我態勢的分析與戰術虛擬驗證不斷優化自主機動決策技術,實現空戰能力的提升.
1 空戰基本態勢分析
無人機空戰過程中,對敵機的態勢主要來自于兩個方面: 一是通過體系雷達組網獲取敵機目標,再由數據鏈發送至無人機;二是通過無人機自身攜帶的火控雷達獲取敵機位置信息[12].但在無預警機作為信息支援的情況下,通常只能通過機載火控雷達實現對敵機的鎖定和攻擊.因此,敵我雙方的火控雷達覆蓋狀況就成為態勢判斷的依據.根據以往態勢判斷的基本方法,可將判斷要素劃分為相對高度、相對速度、相對角度以及距離,且所有要素都并非是正相關,優勢到達一定極值以后則又會迎來下降[9].特別是在中遠距空戰過程中,高度優勢會被不斷弱化,只有進入近距纏斗中,才會體現出高度優勢的作用.相對速度會影響武器的攻擊命中率,相對速度越小,越利于導彈命中.因此,在攻擊時應當盡量縮小相對速度,在逃逸時應當加大相對速度.主要考慮中遠距條件下的空戰對抗,對態勢的分析主要基于相對角度和距離.若將我方UAV 記為紅方,敵方UAV 記為藍方,則紅藍方之間的空戰態勢可分為4 類,如圖1 所示.

圖1 UAV 空戰態勢Fig.1 UAV air combat situation
紅方攻擊優勢是指藍方已在紅方火控雷達照射范圍內,但由于武器彈藥對敵機的命中率并非百分之百,因此,藍方仍有擺脫劣勢的可能;攻擊均勢是指紅方與藍方均在對方的火控雷達照射之下,雙方都有可能被對方擊落;機動均勢是指雙方火控雷達都還未覆蓋對方,只能通過體系雷達獲取敵機位置,無法對對方實施攻擊;紅方逃逸劣勢是指紅方已在藍方火控雷達照射之下,且未用火控雷達鎖定對方,有可能被藍方擊落.假設火控雷達波束呈圓錐形分布,距離越近,輻射越強,攻擊命中率也越高,命中概率可表示為:
式中,pr為紅方UAV 對藍方UAV 的攻擊命中概率;b 為常數;d 為紅藍方之間的距離;σr根據紅藍方相對角和距離變化.σr的計算方法為:
式中,θrb為紅方與藍方之間的相對角;θbr為藍方與紅方之間的相對角;drf、dbf分別為紅藍方火控雷達作用距離;θrf、θrb分別為紅藍方火控雷達照射角度范圍;紅藍方相對角如圖2 所示.

圖2 紅藍方角度關系Fig.2 Angle relationship between the red side and the blue side
在紅藍方剛交戰之初,雙方都是處于一種機動均勢狀態,都希望通過一定的機動過程使敵方陷入逃逸劣勢.但由于紅藍方之間持續性的機動博弈過程,態勢并不會總往我方希望的方向發展,因為決策技術的缺陷、目標的丟失、機動性能的劣勢、電子干擾等原因,必然會有其中一方陷入逃逸劣勢或同時陷入攻擊均勢.電子干擾對命中概率的作用可表示為:
式中,K 為常數.根據STPA 分析方法步驟[13],將紅方陷入逃逸均勢或攻擊均勢定義為一種系統級危險,可能導致的系統級危害分為: 飛機被擊落(D-1);逃逸成功,但敵方獲得制空權,任務失敗(D-2);雙方維持均勢,都被擊落或都未被擊落,任務失敗(D-3).系統級危險與系統級危害之間的關系如表1 所示.
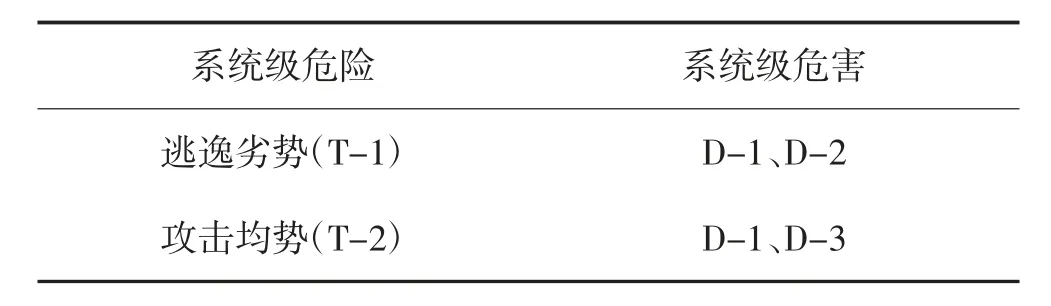
表1 系統級危險與系統級危害關系Table 1 Relationship between system level hazard and system level hazard
通過追溯系統級危險的成因,則可以進一步為避免陷入態勢劣勢提供優化策略.
2 空戰機動控制過程分析
為能夠系統追溯陷入態勢被動的原因,需要構建UAV 空戰態勢感知和機動決策控制過程模型,對各種陷入態勢劣勢的原因與過程進行梳理,為最終原因的查找識別提供支撐.
2.1 機動決策控制過程建模
UAV 在接敵作戰過程中,要想作出正確的機動動作,首先應當獲取準確的敵機空中位置,根據歷史航跡信息預測敵機的當前狀態,判斷威脅區域.根據威脅區域規劃最佳的機動策略,并發出機動控制指令.威脅區域主要指敵機的火控雷達作用區域,UAV作出的空戰戰術機動的目的就在于規避敵機的火控雷達照射范圍,積極鎖定敵機.同時,UAV 出于自身防護目的會加裝電子干擾吊艙,降低敵方攻擊命中概率,為自身爭取機動時間.電子干擾輻射范圍主要集中在兩側,避免側向機動過程中被敵方鎖定攻擊.敵機在電子干擾作用下獲取目標精度會下降,假設獲取目標誤差呈正態分布,且距離越近,誤差越大.UAV 可以積極利用電子干擾掩護展開側向機動,直至構成有利態勢.電子干擾作用下的目標位置獲取可表示為:
UAV 機動決策控制過程模型如圖3 所示.

圖3 UAV 空戰機動控制模型Fig.3 UAV air combat maneuver control model
可以看出,UAV 空戰機動的態勢優勢占據首先需要通過威脅區域的規避,但威脅區域的規避則需要基于威脅態勢的判斷.在敵機電子干擾作用下,態勢的判斷會受影響,有可能誤入威脅區.又由于命中概率與距離有關,對于高風險威脅區域的判斷又會成為取勝的關鍵.
2.2 空戰機動威脅分析
對于中遠距空戰而言,UAV 的機動動作主要有3 類: 左轉、右轉及直行.但為了態勢的搶占,又可將機動控制按照戰術目的劃分為: 態勢爭奪機動(C-1)、威脅避讓機動(C-2)、追擊機動(C-3).會引發態勢丟失,導致被敵機擊落的行為定義為不安全行為,則可歸納如表2 所示.
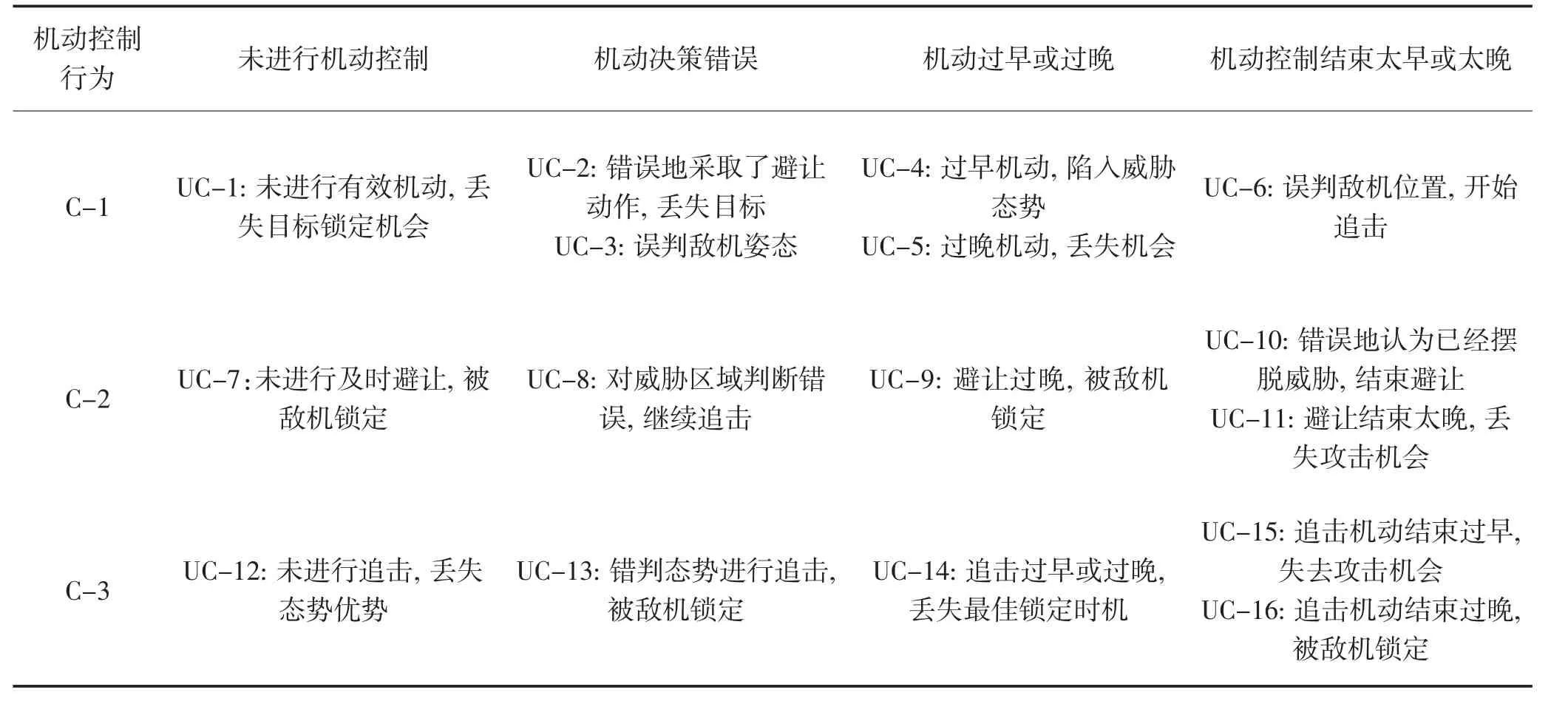
表2 UAV 空戰過程不安全行為Table 2 Unsafe behavior of UAV air combat process
根據分析形成的空戰過程不安全行為,可進一步分析造成這一行為致因因素,為UAV 空戰性能的優化提供目標,致因因素的分析結合圖3 和表2 進行,分析結果如表3 所示.

表3 UAV 空戰對抗失利致因因素Table 3 Factors causing failure of UAV air combat confrontation
2.3 空戰能力提升策略分析
根據分析的UAV 空戰對抗失利原因,可以梳理對應的優化措施,提升空戰對抗的勝率.但UAV 系統基于STPA 方法的優化與傳統有人機領域不同,有人機的優化可從系統級危險、不安全行為和致因因素3 個方面著手[11],但無人機自主空戰能力的優化則更關注系統性能的提升和戰術的改進.因此,針對表2~表3 分析結果,對UAV 空戰能力優化提出改進措施,空戰不安全行為改進措施如表4 所示.
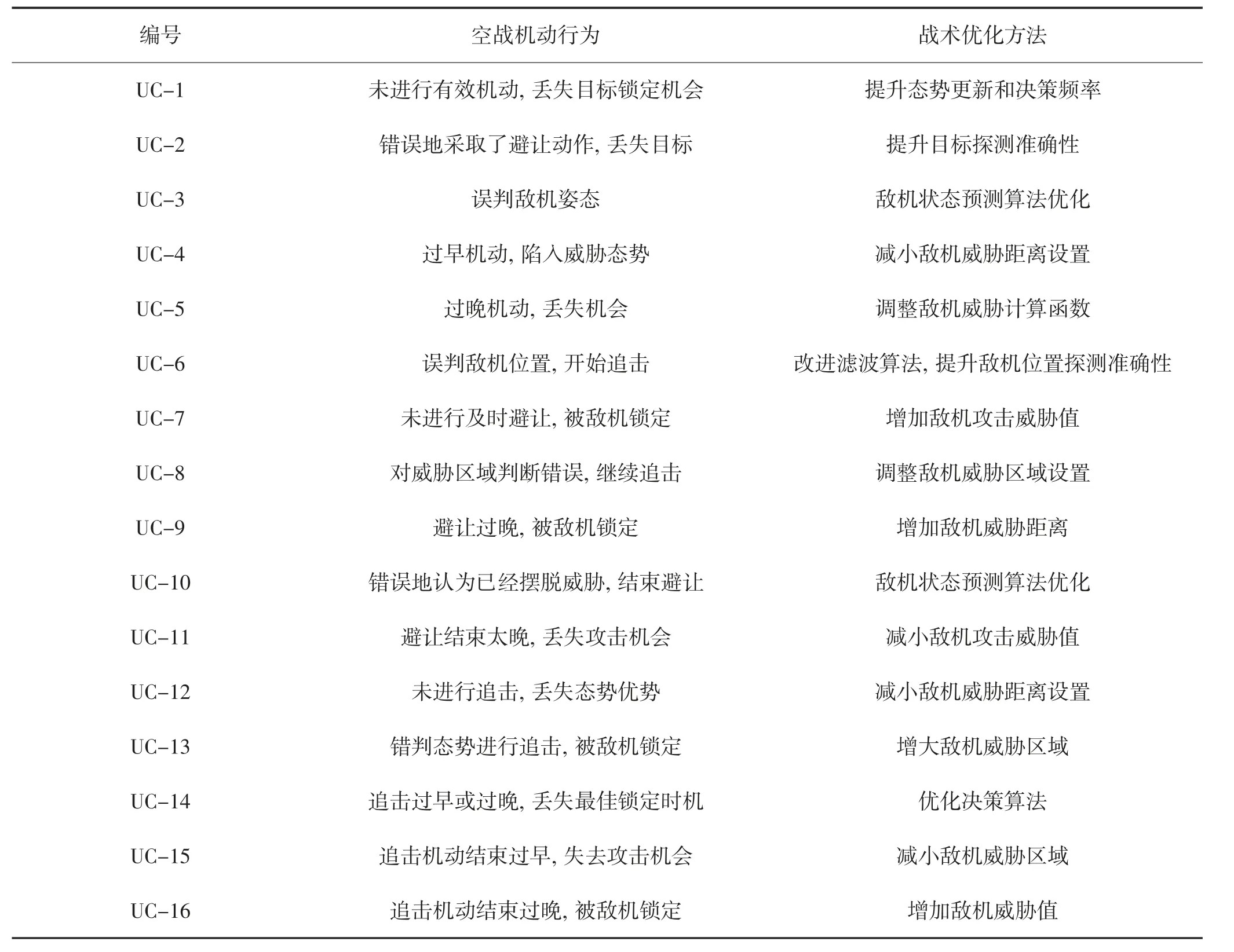
表4 空戰對抗不安全行為改進措施Table 4 Improvement measures for unsafe behaviors in air combat confrontation
UAV 系統部件的優化措施如表5 所示.
表5 UAV 空戰系統部件優化措施Table 5 Optimization measures for components of UAV air combat system
3 驗證平臺構建與戰術驗證
3.1 空戰對抗平臺構建
3.1.1 驗證平臺架構
驗證平臺主要用于驗證技術優化方案對空戰勝率的影響.由于前期提出的一系列戰術改進策略或技術優化方案僅僅是根據決策者的先驗知識形成,最終對勝率的影響則需要基于更為科學的手段進行評估.驗證平臺主要由輸入層、運行層及輸出層組成.輸入層用于輸入敵我雙方的初始態勢、交戰規則及性能參數;運行層基于輸入參數開展虛擬對抗模擬,記錄過程數據;輸出層提取用戶所需的數據,經處理后輸出給用戶,同時展現空戰動態過程,為戰術方案的優化和技術的改進提供決策支撐.驗證平臺框架如圖4 所示.

圖4 UAV 空戰驗證平臺Fig.4 UAV air combat verification platform
3.1.2 空戰機動模型
本文重點研究UAV 一對一對抗空戰的態勢分析與戰術優化.在超視距空戰對抗過程中,水平機動空間相對于垂直機動空間廣泛得多,而水平機動方式也是爭奪態勢和擺脫攻擊的主要方式,因此,空戰機動模型也主要基于二維水平空間構建.
構建虛擬對抗模型.通常為了能夠進行快速的UAV 機動決策計算,會把空間進行離散化,但離散化的空間環境會影響空戰對抗的真實性.特別是在較為廣泛的空戰場內,分辨率越高,對計算的速度影響越大,分辨率低則影響驗證結論的正確性.對此,在連續的空戰場內,使用動態柵格進行機動決策,基于決策結論在連續域內進行機動控制.敵我方UAV 在柵格內的坐標始終固定,柵格根據UAV 的相對位置自適應旋轉.動態柵格如圖5 所示.
圖5 動態柵格環境Fig.5 Dynamic grid environment
規定動態柵格坐標與大地坐標之間的旋轉角順時針方向為負,則坐標變換公式為:
式中,θg為柵格坐標與大地坐標之間的交角;(xg,y)g為某一柵格坐標;(x,y)為轉換后對應的大地坐標;為無人機在柵格坐標中的位置向量與X 軸形成的夾角,逆時針旋轉為正.在柵格環境內,基于QL(Q Learning)算法進行路徑規劃[3],若路徑的第一步為左轉、直行或右轉,則向飛行控制系統發送左轉、直行或右轉的指令,實現無人機的機動控制.以紅方UAV 為例,UAV 機動控制模型為:
式中,(xr,yr)為紅方UAV 的位置坐標;vr為紅方UAV的速度;φr為紅方UAV 的航向;ar為紅方UAV 的加速度;ωr為紅方UAV 的轉彎角速度.
實施實驗室管理規范化、科學化工作中,提高人員素質是關鍵。管理是一種社會行為,是人與人之間發生作用的過程,在管理過程的各個環節,只有人才是主體,是決定管理效率的關鍵,而決定管理水平的高低又取決于人員素質,人員素質是指管理人員在承擔一定的管理事務中所必須具備的基本條件,在實驗室管理規范化、科學化工作中要求工作人員應具有政治素質、心理素質和業務素質等基本素質。
3.2 評價指標設計
UAV 操控員在戰術優化過程中,需要從空戰過程中根據UAV 的航跡信息得知戰術缺陷,也要知道提出的優化方案對最終勝負的影響.又由于UAV 空戰對抗充滿了不確定性,因此,每一局對抗都有勝或者負的可能,因此,優化方案的有效性需要通過多局對抗仿真模擬得出的勝負率得出.勝負率計算方法為:
式中,Rr為紅方勝負的比率;為紅方對局取勝的局數;為紅方對局敗的局數.
3.3 戰術優化仿真驗證分析
由于技術優化的周期較長,在空戰中很難發揮立竿見影的效果,因此,重點對戰術的優化進行驗證,兩者優化流程相似,不再重復進行論述.通過對表3的戰術機動行為和戰術優化方法進行分析可以發現,對敵機武器威脅距離、角度及程度的判斷失誤是導致態勢丟失的重要原因.武器命中概率與敵我之間的距離、相對角度、電子干擾等要素有關,距離敵機越近,命中概率越高,但被擊落的風險也越高,因此,對于敵機最大威脅區域及我機最佳機動距離的確定是提升空戰勝率的關鍵.假設敵機的火控雷達電磁輻射規律已經被我方電子偵查機捕獲加以分析,并形成了攻擊概率函數,表示方法同式(1)~式(3).基于空戰驗證平臺,開展戰術優化論證,首先是導入初始態勢,如表6 所示.
表6 驗證平臺初始參數設置Table 6 Initial parameter setting of validation platform
戰術驗證中,紅藍方火控雷達輻射角度均為60°,藍方的火控雷達工作距離取不同的值,通過勝負率考察敵機的主要威脅區域,識別最佳的機動距離和相對角度.在仿真驗證過程中,首先對空戰對抗過程進行分析,查看過程模擬的有效性,如圖6 所示.
圖6 UAV 對抗空戰過程Fig.6 UAV air combat confrontation process
從仿真圖可以看出平臺可以對空戰過程進行模擬.為探索最佳機動距離,對敵機火控雷達不同作用距離下,采取不同機動距離的空戰勝負比進行分析,結果如圖7 所示.
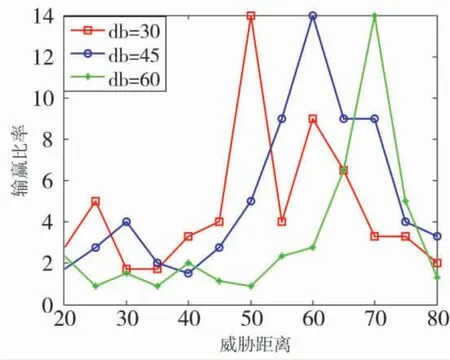
圖7 UAV 對抗空戰勝負比Fig.7 Win-lose ratio of UAV air combat confrontation
圖7 中紅色、藍色、綠色曲線為藍方火控雷達作用距離,分別為30 km、45 km、60 km 時的勝負比曲線.可以看出,最佳機動距離應當比敵機的火控雷達作用距離多10 km~20 km,若機動距離再加大,則會出現過早機動,若機動距離再縮小,則會出現過晚機動.在藍方火控雷達作用距離為60 km 的前提下,考察不同機動距離和機動相對角度之間的關系,形成的勝負包絡曲線如圖8 所示.
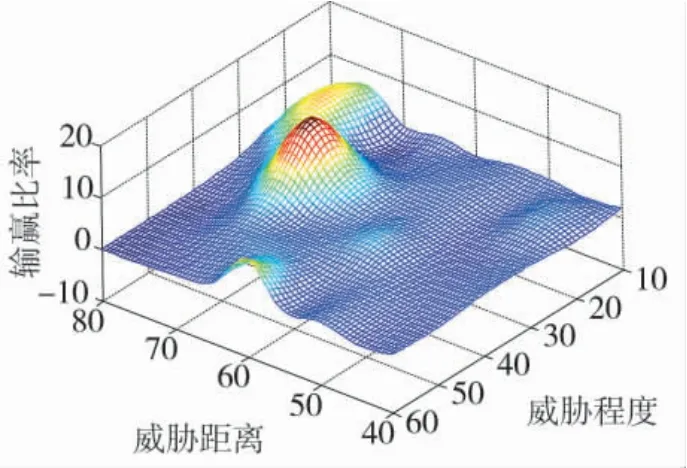
圖8 UAV 空戰對抗勝負包絡曲線Fig.8 Win-lose envelope curve of UAV air combat confrontation
通過包絡曲線的分析可以迅速得出最佳機動距離和機動角度之間關系,在敵機火控雷達有效作用距離為60 km,輻射角度為60°的條件下,紅方的最佳機動距離為75 km,最佳機動相對角度為40°,此時可以實現最佳的勝負比為27/3.
本文的研究對象為UAV 中遠距空戰的評估與戰術優化,主要在二維平面內展開分析研究,但在中遠距空戰中,高度的活動空間相對于水平面內的活動空間極為狹小,通過垂直機動很難躲避火控雷達的搜索,因此,主要還是通過水平機動開展空戰對抗,研究成果拓展到三維空間仍然有效.
4 結論
基于STPA 分析方法,對UAV 的對抗空戰過程展開分析,并設計了戰術優化驗證平臺,通過驗證,得出了以下結論:
1)通過STPA 方法可以對UAV 對抗空戰過程進行建模,并通過態勢的分析,識別空戰失利的內在原因,原因包含了機動控制戰術和系統部件兩個層面.
2)設計了UAV 空戰對抗的戰術驗證平臺,可快速對UAV 的對抗空戰戰術進行虛擬對抗驗證,為戰術優化的有效性提供數據支撐.但本文方法對戰術的優化需要提前對敵機的火控雷達性能和彈藥性能有一定的了解,否則無法開展戰術驗證.
3)在對UAV 空戰失利態勢充分識別的基礎上,繪制了對抗勝負包絡曲線,通過最佳機動距離和機動相對角的組合選取,可有效提升空戰勝負比.
4)當前的戰術優化驗證還有大量人工參與的工作,對規劃人員的業務能力有較高依賴性,在下一步的工作中將優化評估方法,提升評估的自動化和效率,強化作戰能力.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45