領航者-跟隨者集群系統的隊形優化與控制
2024-01-26 03:18:20陳明飛王曉東
指揮與控制學報 2023年6期
陳明飛 王曉東 宋 勛 王 東 王 偉
隨著人工智能、多傳感器信息融合和網絡通信等相關技術的高速發展,由無人機和無人車等智能設備組成的集群系統作為未來智能化戰場環境下的新型武器,受到了中美等軍事強國的高度關注.相比于單一個體,集群系統通過信息傳遞實現個體間相互合作,形成優勢互補,并借助數量龐大的優勢在軍事對抗中占據主導地位.編隊控制作為集群系統的重要研究課題之一,已廣泛應用于軍事領域,如多架低成本的無人機形成固定的隊形以保護高價值的有人機免受敵方攻擊.相較于集中式控制,基于多智能體架構的分布式控制具有去中心化、良好的可擴展性和魯棒性等特點,已成為國內外的研究熱點.
隨著多智能體系統一致性理論發展,分布式編隊控制技術取得了豐富的研究成果[1-12].文獻[1]設計基于相對狀態反饋的控制器,通過局部信息傳遞,跟隨者與領航者之間保持固定的距離實現編隊控制.文獻[3]考慮了通信鏈路故障下的編隊問題,結合李雅普諾夫穩定性理論和線性矩陣不等式技術,證明設計的控制系統是穩定的.針對無人機系統存在未知擾動的情況,文獻[5]基于有限時間控制理論設計分布式自適應控制協議,減少了跟蹤誤差.文獻[6]考慮了固定翼無人機集群在航行過程中存在速度約束和風速干擾的情況,設計僚機跟隨長機的分布式控制律,實現編隊跟蹤控制.針對固定有向通信網絡和時變有向通信網絡兩種情況,文獻[10]設計基于觀測器的分布式控制協議,給出時變編隊的充分條件.文獻[11-12]分別研究了高階同構系統和高階異構系統的有限時間編隊跟蹤問題.
在上述提到的集群編隊工作[1-12]中,研究者根據領航者與跟隨者之間的相對位置和姿態等信息,通過設計相應的控制協議,使得運動軌跡滿足預先設定的偏移函數.然而,上述文獻并沒有結合特定實際的背景衡量隊形的收益,也沒有判斷集群的隊形是否為最優的.為了獲得集群系統中個體的最優位置,文獻[13]基于博弈論研究了四旋翼無人機集群的最優位置問題.但每架無人機在相互競爭的場景下僅衡量自身的收益,獲得的個體最優位置并不意味著整個集群系統是最優的.為了充分發揮集群協作的優勢,文獻[14]將靜態的隊形優化問題建模為分布式聚合優化問題: 每個智能體有一個與自身位置和集群中心位置相關的目標函數,通過局部信息交互衡量集群系統的整體收益,合作構建最優隊形.在實際的跟隨者形成最優隊形環繞在領航者周圍并抵御入侵者攻擊的情形下,跟隨者的目標函數會隨著入侵者位置和領航者位置動態變化.因此,關于時變目標函數的領航者-跟隨者隊形優化問題亟待進一步研究.
受上述工作啟發,本文考慮了領航者-跟隨者集群系統的隊形優化問題,每個跟隨者不僅需要保護領航者,還存在威懾入侵者和避障等任務,并基于多智能體分布式優化理論,將上述問題建模為在線聚合優化問題.通過分布式搜尋全局目標函數的極小值優化領航者-跟隨者的隊形.主要創新點如下:
1)結合梯度下降法和投影算子,提出了一種固定步長的離散時間分布式在線算法.基于矩陣放縮方法,證明設計的算法動態遺憾界與常數項和在線時間相關.
2)結合動態平均一致性協議和梯度追蹤方法,實現分布式估計集群系統的中心位置,充分保護了跟隨者的隱私.
1 預備知識與問題描述
1.1 符號說明
首先介紹本文使用的符號.
Rn表示n 維實向量空間.1n和0n分別是所有元素均為1 和0 的n 維列向量.定義△g 是函數g 的梯度以及列向量.表示矩陣A 和矩陣B 的克羅內克積.定義為歐幾里得范數.對于任意的矩陣A 和向量a,則有.表示矩陣A 的譜半徑.
1.2 圖論
1.3 問題描述
考慮領航者-跟隨者集群系統的隊形優化問題,其中,由n 個跟隨者旨在形成最優隊形保護領航者免受入侵者攻擊.本文不考慮底層姿態和機動控制,僅將領航者和跟隨者看作運動的質點,采用如下模型描述跟隨者的運動
在上述問題中,跟隨者i 存在如下的局部目標函數[14-15]:
注2 在集群編隊問題[5-7]中,跟隨者xi需要與領航者x0之間保持編隊偏移量di,即.然而,編隊偏移函數di往往是根據先驗知識設定的.如果偏移函數設定較差,則難以充分發揮集群系統中智能體的互補優勢.在問題(2)中,通過求解在線聚合優化問題尋找最優決策,跟隨者形成最優隊形保護領航者免受入侵者攻擊.
注3 不同于分布式優化問題[16],分布式聚合優化問題(2)局部目標函數fi不僅與局部決策xi相關,還依賴于全局聚合信息.此外,在聚合博弈[17]問題中,所有參與者以非合作的方式尋找納什均衡點.而問題(2)中跟隨者以合作的方式最小化函數,形成最優隊形.
為了方便后續分析,給出如下假設.
本文旨在設計分布式算法求解在線聚合優化問題(2)的極小值,進而確定領航者-跟隨者集群系統的最優隊形.
2 算法設計與收斂性分析
2.1 算法設計
根據式(1)、式(4)~式(6),設計的算法的緊湊形式如下:
其中,
2.2 收斂性分析
在分析算法(7)的收斂性之前,給出后續證明中用到的引理.
引理2[14]在假設2~5 的前提下,對所有的,則有
引理3[18]假定是一個非負不可約矩陣且對角元素滿足.矩陣M 的譜半徑的充要條件是.
引理4[14]在假設1 的前提下,存在正數滿足
下面的引理給出了核心的矩陣不等式關系.
引理6 在假設1~5 的前提下,算法(7)的軌跡使得下列不等式成立:
如果步長α 滿足
整理式(10),式(13)和式(16)可得式(8).根據引理3,計算行列式
結合式(18)和式(19),可得式(9).根據文獻[20]中定理6.2.24,由于矩陣M 對應的有向圖是強連通的,則M 不可約矩陣.由引理3 可得矩陣M 譜半徑.證畢.
下面的定理描述了算法(5)動態遺憾界.
定理1 假設1~5 成立.如果步長α 滿足式(9),則動態遺憾界滿足
證明: 首先,遞歸迭代式(8)可得
對式(21)兩邊同時取歐幾里得范數可得
根據式(3),動態遺憾界為
因此,可得動態遺憾界RT式(20).證畢.
,且步長α 滿足式(9),則動態平均遺憾界滿足
對式(25)兩邊同時取2 范數可得
由式(23)和式(26)可得
同理,動態遺憾界為
則平均動態遺憾界為
因此,可得平均動態遺憾界式(24).證畢.
注7 文獻[14]將集群系統的隊形優化問題建模為分布式聚合優化問題,通過設計離線分布式算法求解全局函數極小值.然而,文獻[14]的算法無法處理局部目標函數隨時間變化的情況.因此,本文將離線的聚合優化問題延伸到在線情形,利用矩陣放縮方法分析算法的動態遺憾界.此外,采用動態平均一致性方法,實現分布式估計集群系統的中心位置和平均梯度,充分保護了跟隨者的隱私.
3 仿真算例
考慮由1 個領航者和4 個跟隨者組成的集群系統的隊形優化問題,跟隨者相應的通訊網絡如圖1所示.其中,跟隨者形成最優隊形保護領航者免受入侵者攻擊.在仿真中,僅考慮二維平面的運動軌跡(可直接擴展到多維空間),設定運動區域約束為,安全距離,權重系數,,障礙物d0是以為圓心,半徑為0.4 的圓.假定入侵者從運動區域外圍向領航者逼近,設定領航者和入侵者的運動軌跡為
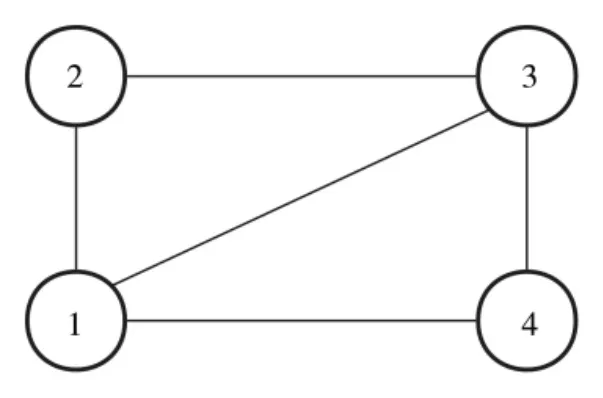
圖1 集群系統的通訊網絡Fig.1 The communication network of the swarm system
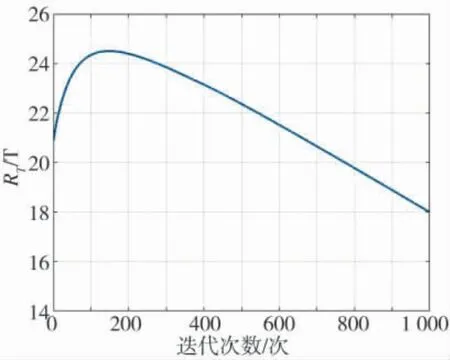
圖2 算法(5)的平均動態遺憾界Fig.2 The evolutions of the average dynamic regret of algorithm(5)
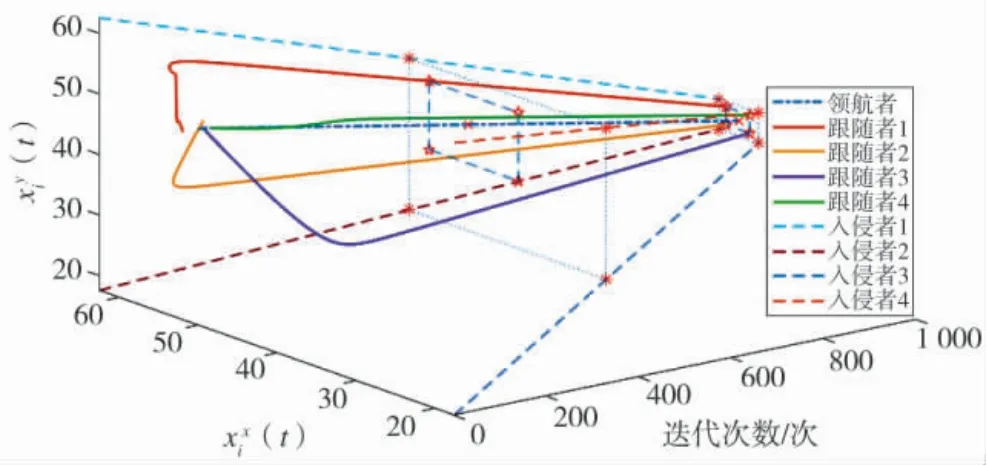
圖3 集群系統的運動的軌跡Fig.3 Movement trajectories of the swarm system
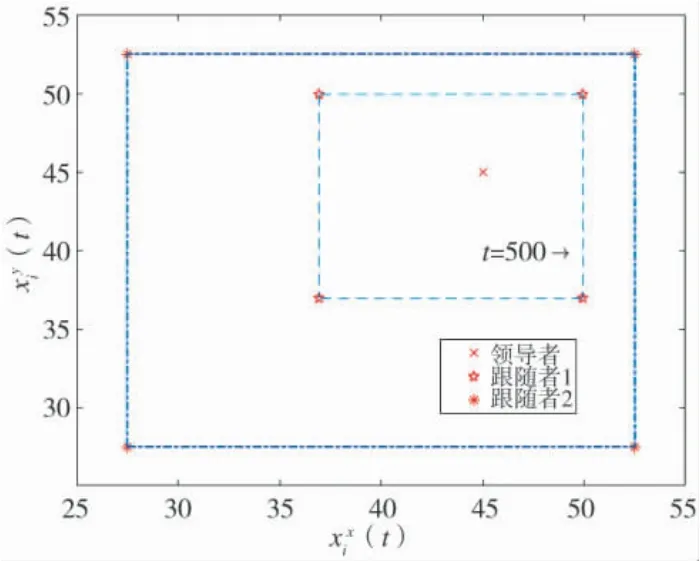
圖4 t=500 時集群系統的位置Fig.4 Locations of the swarm system at t=500
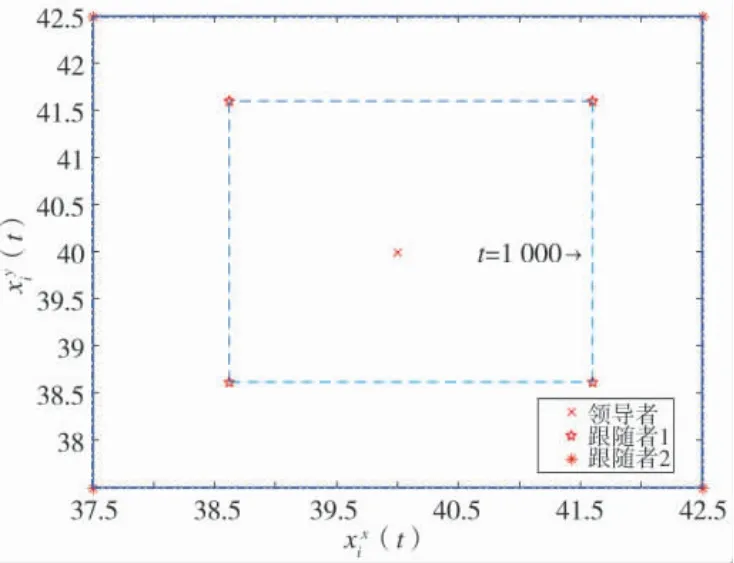
圖5 t=1 000 時集群系統的位置Fig.5 Locations of the swarm system at t=1 000
4 結論
本文提出了一個固定步長的離散時間算法解決分布式在線聚合優化問題.結合動態平均一致性協議和矩陣放縮方法,證明跟隨者軌跡的動態遺憾界與常數項和在線時間相關.設計的算法為領航者-跟隨者集群系統的隊形優化問題提供了理論依據,具有良好的應用價值.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34