干擾攻擊下基于隨機(jī)通信的多智能體系統(tǒng)一致性分析
2024-01-26 03:18:20吳小太余金其張振華
指揮與控制學(xué)報(bào) 2023年6期
吳小太 余金其 唐 漾 張振華
隨著未來(lái)戰(zhàn)爭(zhēng)向信息化與網(wǎng)絡(luò)化對(duì)抗方向迅猛發(fā)展,以多智能體系統(tǒng)協(xié)同控制為代表的群體智能技術(shù)正在向軍事領(lǐng)域全面滲透[1],并在無(wú)人機(jī)蜂群戰(zhàn)術(shù)[2]、多導(dǎo)彈協(xié)同作戰(zhàn)[3]、協(xié)同偵察系統(tǒng)等方面得到廣泛應(yīng)用.集群系統(tǒng)通過(guò)網(wǎng)絡(luò)和通信技術(shù)來(lái)實(shí)現(xiàn)智能體與其鄰居節(jié)點(diǎn)之間的信息傳遞與協(xié)同工作[4-5],進(jìn)而完成復(fù)雜的軍事任務(wù).
在網(wǎng)絡(luò)技術(shù)應(yīng)用于集群智能的同時(shí),系統(tǒng)的指揮與控制模塊及信息傳輸途徑還面臨著來(lái)自外界的惡意攻擊風(fēng)險(xiǎn)[6].當(dāng)系統(tǒng)遭受網(wǎng)絡(luò)攻擊時(shí),合法操作員可能無(wú)法指揮與控制目標(biāo)系統(tǒng),導(dǎo)致控制命令傳輸失敗,使得多智能體系統(tǒng)的一致性無(wú)法得到保證、集群戰(zhàn)術(shù)目標(biāo)無(wú)法完成.因而,確保被控系統(tǒng)的網(wǎng)絡(luò)通信安全已經(jīng)成為一項(xiàng)重要挑戰(zhàn).網(wǎng)絡(luò)控制系統(tǒng)可能會(huì)受到不同類(lèi)型的網(wǎng)絡(luò)攻擊威脅[10-12],主要包括拒絕服務(wù)(denial of service,DoS)攻擊[7]、欺騙攻擊[8]、干擾攻擊[9]等.文獻(xiàn)[10] 研究了一類(lèi)對(duì)抗性攻擊下網(wǎng)絡(luò)物理系統(tǒng)的安全評(píng)估與控制問(wèn)題,且控制信號(hào)在被發(fā)送到執(zhí)行器的過(guò)程中可被攻擊者惡意篡改.文獻(xiàn)[11]指出,攻擊者可以在不被系統(tǒng)監(jiān)測(cè)到的情況下,將特定的虛假數(shù)據(jù)注入系統(tǒng).由文獻(xiàn)[12]可知,自身能量有限的攻擊者還可以利用DoS 攻擊來(lái)阻斷通信網(wǎng)絡(luò)的信息傳輸.因此,研究網(wǎng)絡(luò)攻擊背景下多智能體系統(tǒng)的協(xié)同控制,特別是一致性問(wèn)題具有重要意義.
在假設(shè)網(wǎng)絡(luò)攻擊服從伯努利(Bernolli)分布[13-14]或馬爾可夫鏈(Markov Chain)[15]等隨機(jī)分布的基礎(chǔ)上,針對(duì)隨機(jī)網(wǎng)絡(luò)攻擊下多智能體系統(tǒng)一致性問(wèn)題的研究已經(jīng)取得豐碩成果.文獻(xiàn)[13]主要研究了DoS攻擊導(dǎo)致的網(wǎng)絡(luò)丟包現(xiàn)象對(duì)系統(tǒng)控制性能的影響,設(shè)計(jì)了最大化平均期望估計(jì)誤差的最優(yōu)攻擊調(diào)度方案,以及最大化丟包網(wǎng)絡(luò)上的期望終端估計(jì)誤差的最優(yōu)攻擊調(diào)度方案.文獻(xiàn)[14]設(shè)計(jì)了一類(lèi)智能攻擊者,通過(guò)隨機(jī)向網(wǎng)絡(luò)中的某些通信信道注入DoS 攻擊使得相應(yīng)的被攻擊通信鏈路斷開(kāi),最終破壞目標(biāo)系統(tǒng)的一致性狀態(tài).文獻(xiàn)[15]則考慮了馬爾可夫調(diào)制DoS攻擊下的風(fēng)險(xiǎn)敏感隨機(jī)控制問(wèn)題,其中,攻擊者使用隱馬爾可夫模型隨機(jī)阻塞系統(tǒng)中的控制數(shù)據(jù)包.上述文獻(xiàn)通常從攻擊者角度研究如何設(shè)計(jì)攻擊手段,以提高其攻擊效率,而從被攻擊者角度研究系統(tǒng)在被攻擊時(shí)如何正常運(yùn)行的文獻(xiàn)則相對(duì)較少.當(dāng)系統(tǒng)面臨可能的外部攻擊時(shí),設(shè)計(jì)一種有效且易于實(shí)現(xiàn)的控制機(jī)制,使得被攻擊系統(tǒng)仍能維持正常工作具有重要價(jià)值.文獻(xiàn)[16]提出一類(lèi)與觸發(fā)機(jī)制相結(jié)合的隨機(jī)通信協(xié)議,以降低干擾攻擊對(duì)多智能體系統(tǒng)一致性的不利影響.基于通過(guò)智能體之間隨機(jī)通信或采樣來(lái)生成3 種控制信號(hào)的三元控制方法[17],分別研究了攻擊者干擾攻擊發(fā)生和持續(xù)時(shí)間與隨機(jī)通信時(shí)間無(wú)關(guān)和相關(guān)兩種情形下的多智能體系統(tǒng)的一致性問(wèn)題.所提出的隨機(jī)通信協(xié)議可以在概率意義上確保系統(tǒng)在有限時(shí)間內(nèi)實(shí)現(xiàn)有界一致性.然而,文獻(xiàn)[16]僅假定隨機(jī)通信序列服從均勻分布,這可能導(dǎo)致相鄰?fù)ㄐ砰g隔過(guò)于接近甚至重合的不合理現(xiàn)象,從而限制了相關(guān)研究結(jié)果的實(shí)際應(yīng)用范圍.
本文將考慮干擾攻擊下一類(lèi)基于隨機(jī)通信協(xié)議的多智能體系統(tǒng)一致性問(wèn)題.通過(guò)三元控制方法和隨機(jī)分析技巧,獲得了干擾攻擊下基于隨機(jī)通信的多智能體系統(tǒng)實(shí)現(xiàn)一致性需滿(mǎn)足的充分條件.不同于文獻(xiàn)[16],假定智能體間的通信發(fā)生時(shí)間具有隨機(jī)性,即通信時(shí)間間隔由確定性的準(zhǔn)備時(shí)間與隨機(jī)時(shí)間間隔共同組成,從而進(jìn)一步降低信息在通信過(guò)程中被惡意攻擊的風(fēng)險(xiǎn).值得指出的是,本文引入的確定性與隨機(jī)時(shí)間共同組成的混合時(shí)間間隔,可以有效避免文獻(xiàn)[16]中通信發(fā)生時(shí)間間隔過(guò)小,甚至重合的不足,有效拓廣了文獻(xiàn)[16]中相關(guān)結(jié)論的適用范圍.相比于文獻(xiàn)[17-18]等采用的確定性通信策略,本文設(shè)置的通信機(jī)制使得采樣時(shí)刻具有隨機(jī)性,可在一定程度上避免攻擊者對(duì)被控系統(tǒng)具體采樣規(guī)律的偵測(cè)和預(yù)判.相比于受控系統(tǒng)的狀態(tài)軌跡在時(shí)間無(wú)窮大尺度上的漸近或指數(shù)收斂[19],本文基于三元控制方法可以確保多智能體系統(tǒng)在有限時(shí)間內(nèi)實(shí)現(xiàn)一致性.
1 預(yù)備知識(shí)
1.1 圖論知識(shí)
所涉及的圖論相關(guān)概念.用有向圖G=(V,E,C)表示多智能體系統(tǒng)的通信拓?fù)?其中,V={1,…,n}表示拓?fù)鋱D的節(jié)點(diǎn)集,E?V×V 是圖中節(jié)點(diǎn)之間的通信鏈路構(gòu)成的邊集,C=是一個(gè)具有非負(fù)元素的加權(quán)鄰接矩陣.有向連接邊Eij表示從i 節(jié)點(diǎn)到j(luò) 節(jié)點(diǎn)的信息傳輸途徑,當(dāng)且僅當(dāng)Eij∈E時(shí)>0.否則,=0.Ni表示節(jié)點(diǎn)i 的鄰居節(jié)點(diǎn)的集合,di是節(jié)點(diǎn)i 的度.表示圖G對(duì)應(yīng)的拉普拉斯(Laplace)矩陣,其中,,,.
1.2 干擾攻擊描述
考慮在特定時(shí)間區(qū)間內(nèi),智能體之間的通信信道被攻擊者的干擾攻擊所阻斷的實(shí)際情形.類(lèi)似于文獻(xiàn)[16],假定當(dāng)干擾攻擊發(fā)生時(shí),所有通信鏈路上的通信都將失效,即智能體在攻擊持續(xù)期間無(wú)法獲取鄰居節(jié)點(diǎn)的狀態(tài)信息.針對(duì)智能體用于通信的共享網(wǎng)絡(luò)建立如下攻擊模型:
令A(yù)k表示第k 次攻擊的持續(xù)時(shí)間區(qū)間,在此期間智能體之間的信息交互被中斷.對(duì)于任意時(shí)間區(qū)間,A()表示受到干擾攻擊的時(shí)間區(qū)間集合,為:
假設(shè)2 存在正常數(shù)κ和ρ∈(0,1),對(duì)于任意t≥≥0,有
1.3 系統(tǒng)建模及三元控制
考慮多智能體系統(tǒng)的動(dòng)力學(xué)方程如下:
注1 針對(duì)多智能體系統(tǒng)一致性問(wèn)題的研究有兩類(lèi)控制器比較常見(jiàn),一是經(jīng)典的連續(xù)性控制器,二是僅在離散時(shí)刻更新控制信號(hào)的控制器.本文采用三元控制方法的動(dòng)機(jī)如下: 一方面和第一類(lèi)控制器相比,三元控制器只需測(cè)量隨機(jī)時(shí)刻處智能體鄰居節(jié)點(diǎn)的狀態(tài)信息,從而避免連續(xù)通信帶來(lái)的高成本、高通信風(fēng)險(xiǎn)等不利因素的影響;另一方面,本文在基礎(chǔ)上進(jìn)一步引入了符號(hào)函數(shù)并使得,進(jìn)而保證與符號(hào)一致,這是后續(xù)證明受控系統(tǒng)能夠?qū)崿F(xiàn)有界一致性的關(guān)鍵.
1.4 隨機(jī)通信協(xié)議
本節(jié)提出一類(lèi)混合式通信時(shí)間間隔模型,即相鄰?fù)ㄐ砰g隔包含確定性的準(zhǔn)備時(shí)間和隨機(jī)通信時(shí)間,研究混合通信模式下多智能體系統(tǒng)(5)的一致性問(wèn)題.其中,確定性的準(zhǔn)備時(shí)間也被稱(chēng)為準(zhǔn)備期,隨機(jī)通信時(shí)間則是指智能體間的通信發(fā)生時(shí)刻在該時(shí)間區(qū)間內(nèi)隨機(jī)出現(xiàn).
定義2 對(duì)于?i∈V,令正常數(shù)△i為周期時(shí)間,Ti*為準(zhǔn)備期的持續(xù)時(shí)間,則智能體i 的準(zhǔn)備期和隨機(jī)通信區(qū)間可分別表示為[k△i,k△i+Ti*]與[k△i+Ti*,(k+1)△i],而通信發(fā)生時(shí)刻是隨機(jī)通信區(qū)間上均勻分布且彼此之間相互獨(dú)立的隨機(jī)變量序列.
注2 文獻(xiàn)[16]中相鄰的通信發(fā)生時(shí)刻時(shí)間間隔可能非常小,甚至重合,從而發(fā)生頻繁啟停的情況導(dǎo)致控制機(jī)制無(wú)法實(shí)際應(yīng)用.針對(duì)該情況,本文提出如圖1 所示的混合式通信時(shí)間間隔模型.引入確定性的準(zhǔn)備時(shí)間,每個(gè)智能體i 嘗試在每個(gè)△i周期內(nèi)向它的鄰居節(jié)點(diǎn)通信一次,即在[k△i+Ti*,(k+1)△i] 中隨機(jī)發(fā)生一次.智能體在準(zhǔn)備期中進(jìn)行短暫的積蓄,避免發(fā)生頻繁啟停的情況.期間,智能體i 不進(jìn)行信息傳輸.假定攻擊者可以預(yù)知智能體處在準(zhǔn)備期進(jìn)行自我維護(hù),因此,不在準(zhǔn)備期發(fā)動(dòng)攻擊,以保留能量進(jìn)行下一次攻擊.
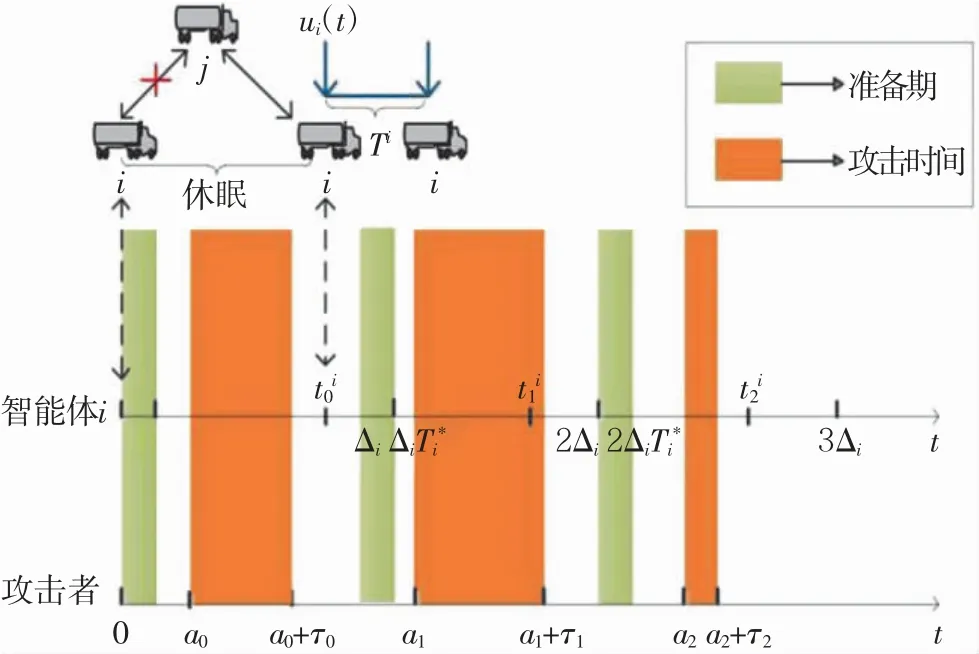
圖1 智能體i 的隨機(jī)通信時(shí)刻Fig.1 Random communication time of agent i
2 一致性分析
基于上述隨機(jī)通信協(xié)議及控制輸入(11),對(duì)干擾攻擊下多智能體系統(tǒng)(5)的一致性進(jìn)行分析.
引理2 若假設(shè)1 與2 成立,則對(duì)任意的i∈V,存在正常數(shù)M 使得
即各智能體可以在概率意義下進(jìn)行無(wú)限次成功的通信嘗試.
證明: 在定義2 與假設(shè)1 條件下,攻擊者為保留能量在智能體i 的準(zhǔn)備期內(nèi)不發(fā)起攻擊,在隨機(jī)通信時(shí)間段內(nèi)發(fā)動(dòng)開(kāi)始時(shí)間和持續(xù)時(shí)間均是定值的干擾攻擊,且攻擊不依賴(lài)于智能體的隨機(jī)通信時(shí)刻.令
因此,每個(gè)智能體i 可以在概率意義下完成無(wú)限次的成功通信.
則多智能體系統(tǒng)(5)滿(mǎn)足有界一致性.
式(27)成立.進(jìn)一步,
注3 定理1 針對(duì)一類(lèi)混合式通信時(shí)間間隔模型,研究了干擾攻擊背景下基于隨機(jī)通信協(xié)議的多智能體系統(tǒng)一致性.值得指出的是在文獻(xiàn)[13]中的通信協(xié)議需要附加假設(shè)條件,ρ+σ△*<1,△*為每個(gè)智能體連續(xù)通信嘗試時(shí)間的最小間隔.當(dāng)上述條件不滿(mǎn)足時(shí),本文提出的隨機(jī)通信協(xié)議仍然能確保多智能體系統(tǒng)達(dá)成一致性.
3 數(shù)值仿真
在文獻(xiàn)[20]中提出的無(wú)人系統(tǒng)網(wǎng)絡(luò)安全背景下,通過(guò)數(shù)值仿真驗(yàn)證上述結(jié)果的可行性.
實(shí)際應(yīng)用中,無(wú)人車(chē)集群通信鏈路主要包括遙控信號(hào)、信號(hào)傳輸和Wi-Fi 通信等模塊.鑒于無(wú)人車(chē)及其通信模塊的特性,當(dāng)攻擊者截獲通信信息或者劫持無(wú)人車(chē)本身時(shí),會(huì)給使用者和周?chē)h(huán)境帶來(lái)嚴(yán)重的后果.考慮如圖2 所示的實(shí)際場(chǎng)景,具體描述如下: 我方合法操作員在地面控制站通過(guò)通信鏈路向無(wú)人車(chē)集群發(fā)送偵察任務(wù);由于通信鏈路的開(kāi)放性,當(dāng)集群進(jìn)入敵方干擾設(shè)備感知范圍時(shí),攻擊者以技術(shù)手段竊取集群的通信數(shù)據(jù);并發(fā)動(dòng)干擾攻擊阻斷無(wú)人車(chē)之間的通信信道,從而造成無(wú)人車(chē)集群的失控癱瘓.

圖2 針對(duì)通信鏈路的網(wǎng)絡(luò)攻擊Fig.2 Network attack against communication link
基于上述應(yīng)用場(chǎng)景,為方便起見(jiàn),僅考慮由4 輛無(wú)人車(chē)構(gòu)成的多智能體系統(tǒng),且系統(tǒng)拓?fù)鋱D(如圖3所示)對(duì)應(yīng)的Laplace 矩陣為:
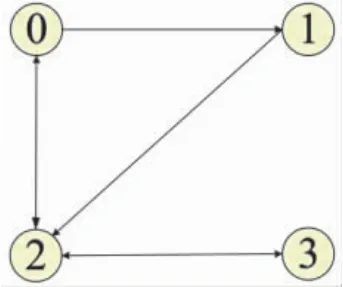
圖3 多智能體系統(tǒng)的網(wǎng)絡(luò)拓?fù)鋱D.Fig.3 Network topology of multi-agent system
各無(wú)人車(chē)分別賦予固定的周期值△0=0.2,△1=0.25,△2=0.2,△3=0.25.令各周期內(nèi)無(wú)人車(chē)的準(zhǔn)備或維護(hù)期分別取值為T(mén)0*=0.05,T1*=0.06,T2*=0.05,T3*=0.06.假設(shè)各無(wú)人車(chē)的初始狀態(tài)分別為x0(0)=0.2,x1(0)=0.1,x2(0)=-0.3,x3(0)=0.6,無(wú)人車(chē)i 的隨機(jī)通信時(shí)刻序列和干擾攻擊時(shí)刻序列如圖1 所示.通過(guò)數(shù)值模擬,可以得到如圖4 所示的智能體在干擾攻擊下的狀態(tài)軌跡示意圖.

圖4 無(wú)人車(chē)系統(tǒng)在干擾攻擊下的狀態(tài)軌跡Fig.4 State trajectory of unmanned vehicle system under jamming attack
由圖4 可以看出,即使在干擾攻擊的背景下,基于隨機(jī)通信協(xié)議的多智能體系統(tǒng)的狀態(tài)軌跡仍然呈現(xiàn)出明顯的收斂趨勢(shì),且隨著時(shí)間的推移,系統(tǒng)狀態(tài)最終穩(wěn)定在一個(gè)已知的且取值較小的上下界內(nèi)部.在三元控制協(xié)議的作用下,受控多智能體系統(tǒng)最終在有限時(shí)間內(nèi)實(shí)現(xiàn)了有界一致性.此時(shí),可以近似認(rèn)為所有無(wú)人車(chē)能夠表現(xiàn)出相同的動(dòng)力學(xué)行為,即一致性狀態(tài)下的無(wú)人車(chē)編隊(duì)的整體隊(duì)形保持不變.因此,本文所得研究結(jié)果的可行性得到了有效驗(yàn)證.
4 結(jié)論
采用三元控制方法研究了干擾攻擊背景下多智能體系統(tǒng)的一致性問(wèn)題.為降低控制過(guò)程中信息傳輸被干擾攻擊的頻率和次數(shù),提出了一種隨機(jī)通信協(xié)議,并設(shè)計(jì)相應(yīng)的混合式通信時(shí)間間隔模型,即智能體在特定時(shí)間段內(nèi)獲取鄰居節(jié)點(diǎn)狀態(tài)信息的時(shí)刻是隨機(jī)的.通過(guò)李雅普諾夫函數(shù)方法以及隨機(jī)分析技巧給出了相關(guān)的一致性準(zhǔn)則,并通過(guò)實(shí)例仿真驗(yàn)證了所得結(jié)果及所用方法的有效性.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
公民與法治(2022年5期)2022-07-29 00:47:28
教學(xué)考試(高考物理)(2021年5期)2021-11-08 10:31:22
中醫(yī)眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
- 指揮與控制學(xué)報(bào)的其它文章
- 基于作戰(zhàn)勢(shì)和優(yōu)勢(shì)窗口的網(wǎng)絡(luò)空間作戰(zhàn)效能評(píng)估方法
- 海洋自主無(wú)人系統(tǒng)跨域通信組網(wǎng)技術(shù)發(fā)展
- 集群智能自主移動(dòng)平臺(tái)協(xié)同技術(shù)專(zhuān)題責(zé)任專(zhuān)家簡(jiǎn)介
- 基于HME-ABC 算法的多無(wú)人直升機(jī)時(shí)間協(xié)同航路規(guī)劃
- 非高斯脈沖干擾下MIMO 系統(tǒng)頻譜智能感知方法
- 基于多聯(lián)盟非合作博弈納什均衡搜索的集群對(duì)抗方法