面向合謀攻擊的多智能體系統彈性一致性控制
2024-01-26 03:18:22溫廣輝
指揮與控制學報 2023年6期
趙 丹 溫廣輝
隨著萬物互聯時代的到來,以無中心、分權化為特點的多智能體分布式協同控制展現出強大的群體智能特性,因而成為現代工程系統的重要構成方式[1].現代工程系統的規(guī)模逐漸擴大,運行環(huán)境極其復雜,面臨著高動態(tài)、不確定性、惡劣環(huán)境、強電磁干擾等各種威脅.2019 年6 月,伊朗擊落美軍全球鷹無人機事件表明,利用電磁干擾可以造成無人機的通信中斷、控制失靈,甚至被擊落[2].因此,研究多智能體系統安全協同控制問題,快速準確隔離攻擊的影響,提出彈性控制方案,提高多智能體系統在復雜環(huán)境中的生存能力和魯棒性,對多智能體系統在社會生產生活中的深入應用具有重要意義[3-4].
攻擊檢測與隔離可以實現攻擊的預警與定位,是管控多智能體系統安全風險的重要環(huán)節(jié).利用觀測器對系統狀態(tài)進行估計,并與實際系統的運行情況進行對比,得到比較殘差,當其超過一定閾值時,則可預警攻擊的發(fā)生.卡爾曼濾波器、龍伯格觀測器、未知輸入觀測器、滑模觀測器、神經網絡觀測器等已經在多智能體系統的攻擊檢測中得到深入應用[5-9].考慮到系統運行過程中,僅測量輸出信息可以被獲取,因而提出了基于相對輸出測量的觀測器設計方法[10].當多智能體系統中有多個個體遭受攻擊時,則需要在攻擊檢測的基礎上進行攻擊隔離與識別,進一步找出具體遭受攻擊的個體.研究學者借助模型預測控制方法主動調整控制輸入以隔離遭受攻擊的子系統[11].另一方面,有學者將攻擊隔離問題轉化為棧向量l0范數的最小化問題,通過枚舉法搜索所有可能的攻擊集合,從而完成攻擊隔離[12].可以利用壓縮感知方法將攻擊隔離轉化為凸優(yōu)化問題進行求解[13].上述兩種算法的復雜度較高,文獻[14]采用分而治之的思想,通過分布式未知輸入觀測器和限定通信網絡拓撲結構的方式完成攻擊隔離.
在黑客技術高度發(fā)達的今天,攻擊可能導致系統中的某些個體被“策反”,則應盡可能確保正常個體不受攻擊的影響,以降級運行方式完成既定協同控制任務[15].在僅知道系統中遭受攻擊個體最大數量的基礎上,文獻[15]提出了平均序列刪減(mean-subsequence-reduced,MSR) 算法,正常個體通過刪除所有極值鄰居的方式排除攻擊對其造成的影響,從而實現彈性協同.這種控制方式對系統通信拓撲的連通冗余性要求較高,文獻[15]提出了圖的魯棒性概念來描述這種控制方式對通信拓撲結構的要求.隨后,文獻[16]引入可信節(jié)點,并提出了圖的強魯棒性概念來降低系統對圖的要求.同時,考慮到個體的計算能力和通信帶寬有限,研究學者通過提出事件驅動的量化彈性控制算法來提高控制策略的實用性[17-18].此外,復雜戰(zhàn)場環(huán)境無法確保無人集群的穩(wěn)定通信,文獻[19]提出了圖的聯合魯棒性概念,來應對時變通信情況下的彈性控制問題.值得注意的是,上述控制算法將鄰居的狀態(tài)信息作為刪除的指標,因此,只適用于積分器型的系統.實際應用中,多智能體系統的模型復雜,因此,需要進行必要的改進.
對于一般多智能體系統模型,文獻[20]利用基于相對輸出測量的觀測器方法進行攻擊檢測,使得某一智能體遭受的壞數據注入攻擊可以同時反映在其自身和鄰居的殘差上,并提出圖的可隔離性概念實現攻擊的零漏報和零誤報.文獻[21]進一步提出了隱蔽攻擊下的彈性穩(wěn)定控制算法.文獻[22]將上述攻擊檢測算法應用到通信鏈路遭受攻擊情形下的彈性控制問題中.文獻[23]考慮智能化壞數據注入攻擊相互合謀的情況,在攻擊合謀能力不受任何約束的前提下解決了合謀攻擊的零漏報問題.
本文在攻擊的合謀能力受限的情況下,擬對MSR 類算法進行改進,設計基于觀測器的攻擊檢測與隔離算法,使得系統更新過程中僅刪除已隔離鄰居的信息,并探討通信拓撲結構與零漏報攻擊隔離和彈性協同控制之間的關系,為構建高彈性強抗毀的多智能體系統提供技術支持.相比于現有的研究成果,創(chuàng)新性總結如下: 1)文獻[15-19]提出的MSR類算法只適用于積分器型的系統,本文所提出的基于攻擊隔離的彈性控制算法適用于一般高階系統,具有更廣的適用范圍.2)文獻[23]未考慮攻擊合謀能力的約束,本文在攻擊局部合謀的前提下,降低了攻擊隔離算法所需的拓撲條件.
1 問題的提出
1.1 通信網絡結構
考慮由N 個智能體組成的多智能體系統,其通信網絡結構用無向圖G=(V,E)來描述,其中,V={1,2,…,N} 和E?V×V 分別表示智能體及其連邊的集合.如果存在連邊(i,j)∈E,則表示智能體i 和j 之間可以相互通信.圖G 的鄰接矩陣定義為A,其中,如果(i,j)∈E,則有aij>0,否則,aij=0.智能體i 的鄰居集合表示為,其中,分別為智能體的鄰居.智能體i 的內鄰居集合表示為Ji={i}∪{Ni}.如果圖G 中任意兩個智能體之間均有一條連邊,則稱其是連通的.在圖G 中,環(huán)指的是開始和結束于同一智能體的封閉路徑,并用Ck表示由k 個智能體形成的環(huán).
1.2 系統模型
考慮由N 個智能體組成的多智能體系統,借助反饋線性化方法將系統的動力學線性化[24],得到下列模型:
假設1 系統矩陣(A,B,C)能觀能控.
根據智能體是否遭受攻擊可以將系統中的智能體V 分為兩個子集,即正常智能體集合O 和遭受攻擊的智能體集合F,則有O∩F=?和|O|+|F|=N.根據文獻[15]給出遭受攻擊智能體的數量模型.
定義1 (F-整體攻擊模型) 如果集合F 中最多包含F 個智能體,則稱多智能體系統遭受了F-整體攻擊,即|F|≤F.
本文目標是設計抗合謀攻擊的隔離算法確保隔離遭受攻擊的智能體,并提出基于攻擊隔離的彈性控制算法,使得正常智能體能夠完成協同一致任務.
2 抗合謀攻擊的分布式隔離
2.1 分布式攻擊檢測
為了檢測智能體i 的內鄰居Ji中是否存在攻擊,分別定義智能體i 的狀態(tài)一致性誤差為,輸出一致性誤差為,提出如下基于相對輸出信息的有限時間觀測器:
假設2 對于兩個遭受攻擊的智能體i 和j 而言,只有當它們之間存在一條遭受攻擊的通路,即存在有限序列(i,i1),(i1,i2),…,(ik,j),m=1,2,…,k,且im∈F 時,二者之間才能進行合謀.
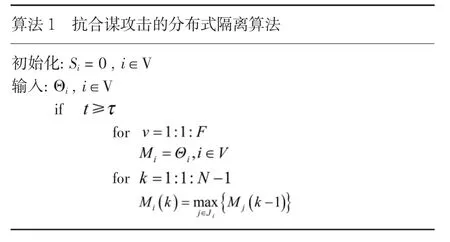
2.2 抗合謀攻擊的分布式隔離算法
定義智能體i 的內鄰居Ji的殘差形成的棧向量為,其l0范數定義為.安全指標Si=1 表示智能體i 被隔離為遭受攻擊的智能體,Si=0 表示智能體i正常.智能體i 的信息集定義為,對兩個智能體i 和j 的信息集來說,若有,則稱.接下來給出抗合謀攻擊的分布式隔離算法,見算法1.
2.3 算法分析
為確保算法1 能夠完成攻擊隔離,回顧文獻[23]中圖的(r,s)-可隔離性定義.
定義2(圖的(r,s)-可隔離性)對于給定的N個節(jié)點組成的圖G=(V,E),如果下邊3 個論述同時成立:
1)圖G 是連通的;
3)圖G 中所有的環(huán)都滿足Ck,k≥s;則稱圖G 是(r,s)-可隔離的.
通過如下引理說明算法1 可以使得每個智能體以分布式方式得到.
引理1 文獻[25]考慮由N 個智能體組成的系統,其中,智能體i 的動力學描述為:
接下來給出算法1 實現零漏報攻擊隔離的充分條件.
(3)相關配套設施不夠完善。就當前我國畜牧養(yǎng)殖現狀來看,存在很多養(yǎng)殖場地址選擇不當、相關配套設施不夠健全等問題。在選址的過程中沒能予以實地考察,這樣的后果就會直接導致養(yǎng)殖場的周邊環(huán)境惡劣,養(yǎng)殖條件不高,容易滋生細菌,致使動物極易患病。
定理1 對于滿足假設1-2 的多智能體系統(1),在F -整體攻擊模型下,算法1 完成零漏報攻擊隔離的充分條件是圖G 是(F,6)-可隔離的.
證明: 文獻[25]的最大一致協議說明算法1 在(F,6)-可隔離圖中能夠確保每個智能體以分布式方式得到,保證了算法1 的分布式特性.
情況1) 中所有遭受攻擊智能體的隔離都早于正常智能體j .
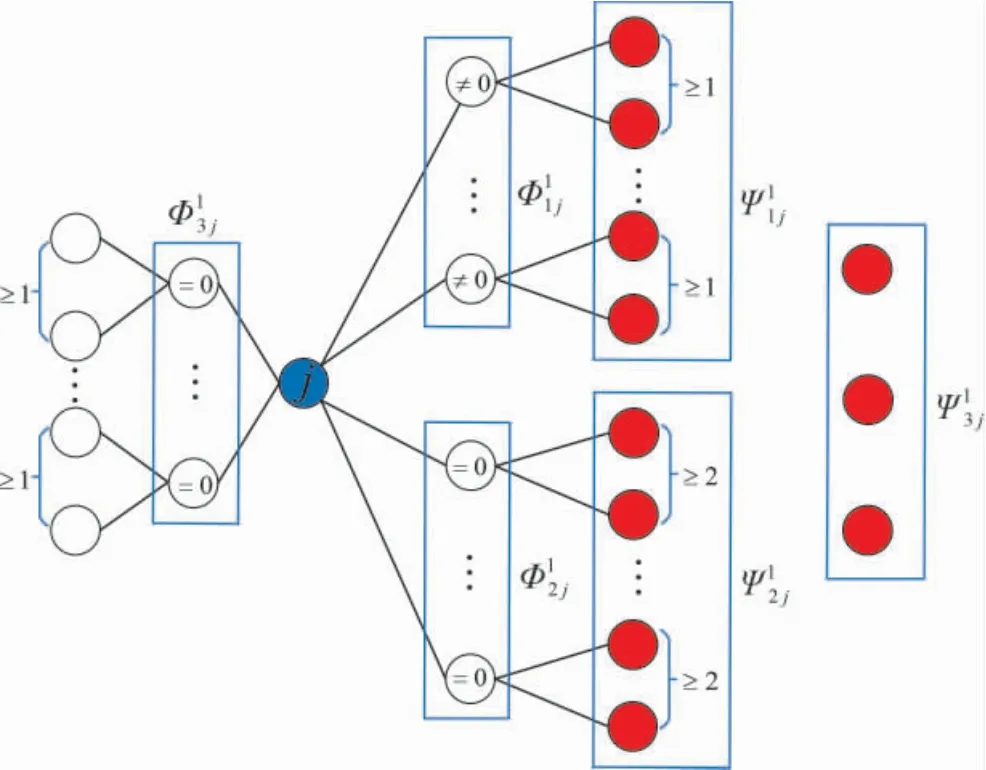
圖1 情況1)下正常智能體與遭受攻擊智能體之間的關系圖Fig.1 The relationship between normal agentand the attacked ones under case 1)

圖2 攻擊在(F,6)-可隔離圖和假設2 條件下的兩種合謀方式Fig.2 Two kinds of ways of attack collusion under(F,6)-isolable graph and assumption 2 conditions
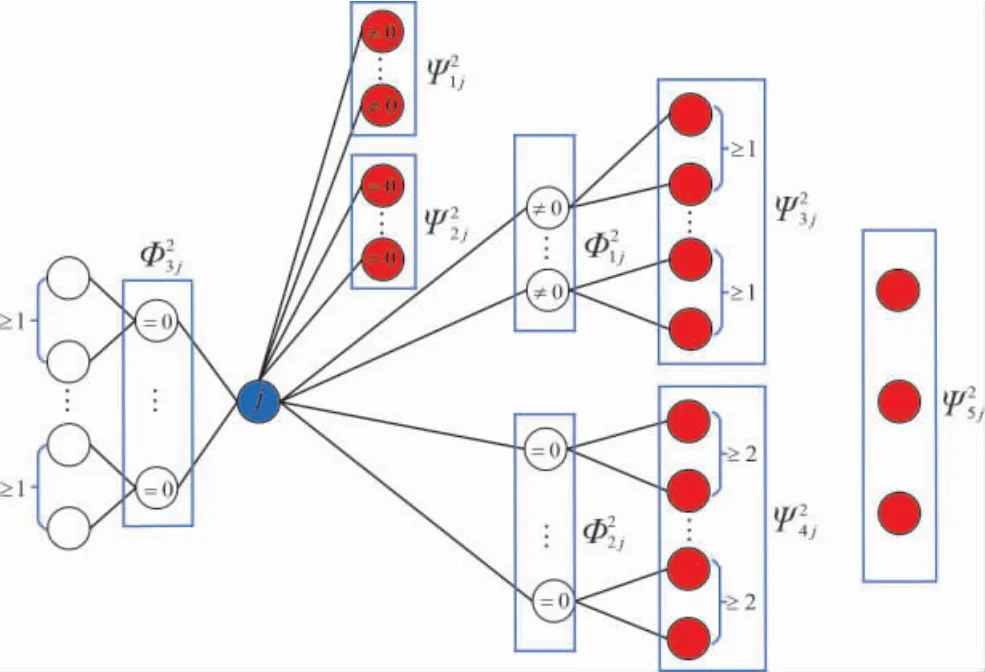
圖3 情況2)下智能體j 與遭受攻擊智能體之間的關系圖Fig.3 The relationship between agentand the attacked ones under case 2)
情況3)正常智能體j 與遭受攻擊智能體的關系與情況2)類似.差別在于,此時,各個集合之間的關系如下:
情況3)的分析類似于情況2),此處略去.
所有遭受攻擊智能體的隔離都早于正常智能體.命題得證.
3 彈性一致性算法設計
當算法1 隔離所有遭受攻擊的智能體后,正常智能體通過斷開與遭受攻擊智能體通信連邊的方式來刪除遭受攻擊鄰居對其產生的影響.正常智能體在斷開與遭受攻擊鄰居的信息交互后,可采用文獻[26]提出的控制協議,具體如下:
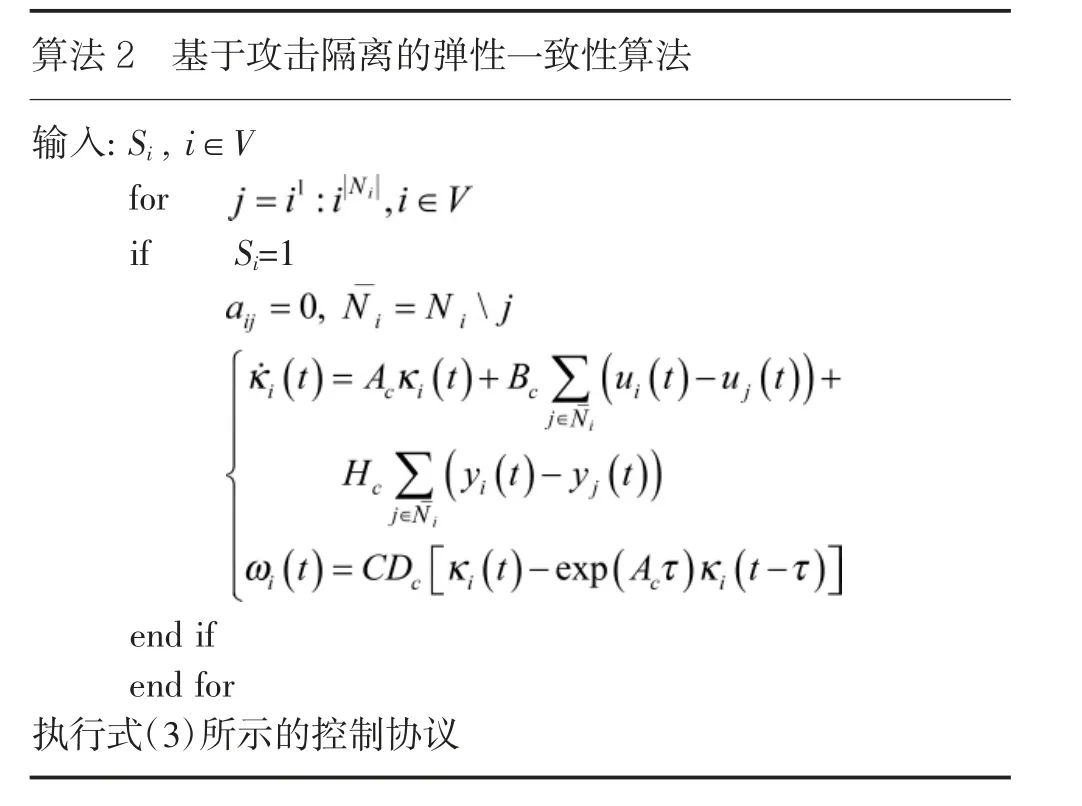
接下來給出算法2 完成彈性一致的充分條件.
定理2 對于滿足假設1-2 的多智能體系統(1),在F -整體攻擊模型下,算法2 完成彈性一致的條件是下面兩個論述同時成立:
1)圖G 是(F,6)-可隔離的.
4 仿真驗證
考慮由14 個智能體組成的多智能體系統,其通信拓撲結構如圖4 所示.智能體的系統矩陣描述如下:
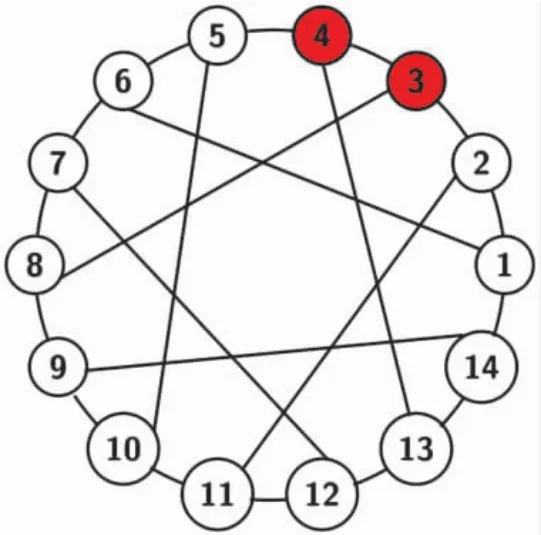
圖4 多智能體系統通信拓撲結構Fig.4 The communication topology for the multi-agent systems

圖5 智能體的殘差軌跡圖Fig.5 The residual trajectory for each agent
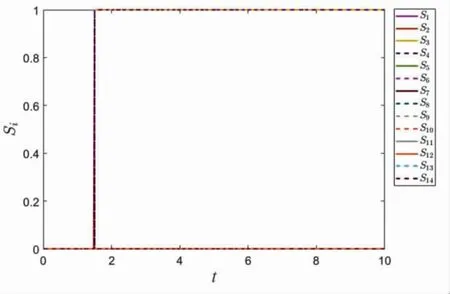
圖6 智能體的安全指標圖Fig.6 The safety index for each agent
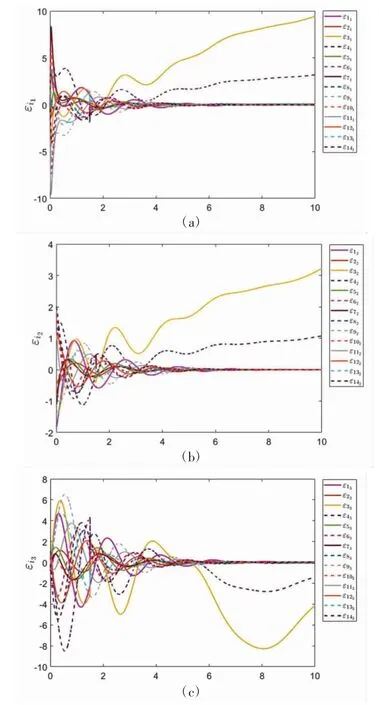
圖7 智能體的狀態(tài)一致性誤差軌跡圖Fig.7 The state consistency error trajectory for each agent
5 結論
本文研究了多智能體系統遭受合謀攻擊下的彈性一致性問題.提出了基于分布式有限時間觀測器的抗合謀攻擊隔離算法,利用已隔離的智能體解耦攻擊間的合謀,并借助圖的隔離性確保攻擊的零漏報.在此基礎上,提出基于攻擊隔離的彈性控制算法,在部分正常智能體被誤隔離的基礎上,實現所有正常智能體的彈性一致.通過數值仿真驗證了所提算法的正確性.接下來將進一步探討圖的可隔離性的等價條件,擴展攻擊隔離算法的適用范圍.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
表面工程與再制造(2019年6期)2019-08-24 06:40:04
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32