耙吸挖泥船耙臂水下安全控制技術(shù)研究與應(yīng)用
2024-01-30 09:45:44潘永軍畢鶴鳴吳昊周昭旭
中國港灣建設(shè) 2024年1期
關(guān)鍵詞:施工
潘永軍,畢鶴鳴,吳昊,周昭旭*
(1.中交疏浚技術(shù)裝備國家工程研究中心有限公司,上海 201208;2.中國交通建設(shè)集團(tuán)有限公司,北京 100088;3.中交疏浚(集團(tuán))股份有限公司,上海 201208)
0 引言
耙吸挖泥船是航道開挖、圍堰造島重器,廣泛應(yīng)用于疏浚工程[1]。隨著計算機(jī)技術(shù)在21 世紀(jì)的發(fā)展,針對逐漸成熟的疏浚工藝以及作業(yè)流程,疏浚設(shè)備以及系統(tǒng)集成廠商已將全自動控制系統(tǒng)在部分船舶上得到應(yīng)用[2]。
耙臂作為耙吸挖泥船水下施工的主要設(shè)備,受水下施工環(huán)境影響,操耙手無法直接觀察耙臂實時狀態(tài),需采用感知技術(shù)監(jiān)測耙臂水下姿態(tài),通過人工干預(yù)保障耙臂水下施工安全[3]。為了更高效地保障耙臂水下施工安全,減輕人工操作的負(fù)擔(dān),本文在分析研究耙臂水下施工工藝過程的基礎(chǔ)上提出一項耙臂水下施工安全控制技術(shù),并與感知技術(shù)相結(jié)合,實現(xiàn)耙臂水下施工過程自動無人化控制。
1 研究背景及技術(shù)路線
1.1 耙臂系統(tǒng)
耙臂安裝在耙吸挖泥船船舷兩側(cè),單個耙臂系統(tǒng)配備3 臺絞車及3 個吊架,由其實現(xiàn)整個耙臂施工過程控制,施工圖見圖1。
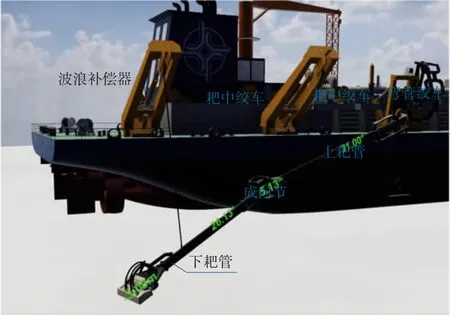
圖1 耙臂水下施工圖Fig.1 Underwater construction of suction tube
耙臂系統(tǒng)由疏浚臺的絞車手柄控制耙頭和耙中液壓絞車實現(xiàn)水下施工,彎管絞車在水下施工時禁止動作,耙臂絞車水下施工工藝如圖2 所示。
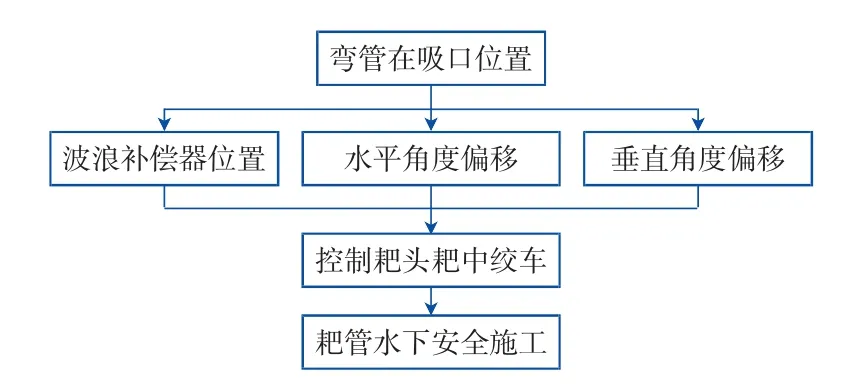
圖2 耙臂水下施工控制方式圖Fig.2 Control method for underwater construction of suction tube
當(dāng)彎管絞車下放至吸口位置時,泥泵運行進(jìn)入施工狀態(tài),耙頭絞車控制耙頭著地,耙中絞車控制萬向節(jié)將上下耙臂保持在一定角度范圍內(nèi)施工。耙臂水下施工過程中,耙頭波浪補(bǔ)償器會隨著耙頭著地而彈起,而波浪補(bǔ)償器的行程是一定的(約0~3 m),不能讓波浪補(bǔ)償器無限的彈起,在達(dá)到一定高度時需控制耙頭絞車,將波浪補(bǔ)償器行程控制在可控范圍內(nèi);耙臂的萬向節(jié)是柔性連接上下耙臂,下水后上下耙臂會隨著耙頭著地后地面拉力及水下浪流的影響,水平和垂直角度均會發(fā)生變化,當(dāng)角度變化超出一定范圍后,人工干預(yù)調(diào)節(jié)耙頭或耙中絞車,將水平和垂直角度控制在安全范圍內(nèi)。
1.2 技術(shù)路線
耙臂水下安全作業(yè)控制受水下施工環(huán)境影響,操作人員無法直接觀察耙臂在水下的實際情況,通過感知技術(shù)反饋的耙臂姿態(tài)進(jìn)行人工干預(yù),該過程存在著一定的滯后性,安全性存在隱患。針對人工操作的局限性,梳理了耙臂水下施工工藝技術(shù),提出一項耙臂水下施工安全控制技術(shù),在此基礎(chǔ)上開展耙吸挖泥船耙臂水下安全控制研究[4]。針對耙臂水下控制3 種情況:波浪補(bǔ)償器位置控制,耙臂水平角度控制,耙臂垂直角度控制,分別使用了不同的控制方法。
2 耙臂水下施工安全控制技術(shù)
本文提出耙臂水下施工安全控制技術(shù)從3 個方面展開:波浪補(bǔ)償器位置控制、耙臂水平角度控制、耙臂垂直角度控制。
2.1 波浪補(bǔ)償器位置控制
2.1.1控制原理
波浪補(bǔ)償器用于維持耙頭對海床的壓力,控制鋼絲繩張力在預(yù)設(shè)的范圍內(nèi)變化,防止鋼纜自由松弛和再度張緊[5]。當(dāng)船舶受波浪影響向上運動,或耙頭沿海床向下運動時,要保持耙頭在海床的位置不變,水面以下的鋼絲繩變長,船上的鋼絲繩變短,鋼絲繩張力變大,油缸在鋼絲繩張力的作用下被縮回;反之,當(dāng)船舶受波浪影響向下運動,或耙頭沿著海床被迫向上運動時,水面以下的鋼絲繩變短,而船上的鋼絲繩變長,鋼絲繩張力變小,為維持鋼絲繩的張力,油缸在油壓的作用下伸出,鋼絲繩張力抵消了耙頭對海床壓力加大的傾向[6]。
2.1.2控制方式波浪補(bǔ)償器中間位置控制示意圖見圖3。
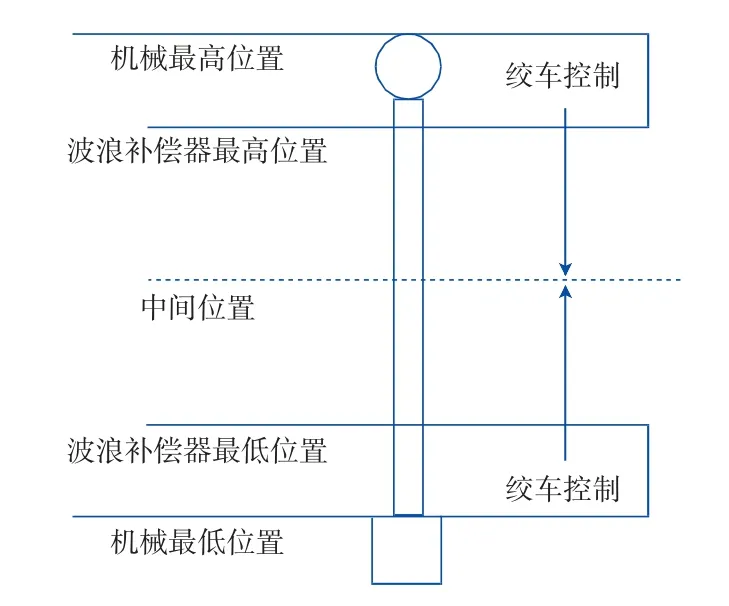
圖3 波浪補(bǔ)償器中間位置控制Fig.3 Middle position control of swell compensator
波浪補(bǔ)償器中間位置控制,可通過監(jiān)視并控制波浪補(bǔ)償器保持在中間位置,該中間位置由波浪補(bǔ)償器設(shè)置中的最高和最低位置計算得出。通過設(shè)定死區(qū)(0.05 m)將波浪補(bǔ)償器控制在中間位置附近,可確保耙頭在海底遇到深凹時能夠緊貼泥面,保持生產(chǎn)效率,同時在遇到海底凸起處時,可將耙頭鋼絲繩收緊,避免耙頭左右擺動,造成重大安全事故。
波浪補(bǔ)償器的中間位置需根據(jù)工程情況恰當(dāng)設(shè)置。例如,波浪補(bǔ)償器的中間位置設(shè)定過于接近于機(jī)械上限位,那么當(dāng)耙頭遇到海底深凹時,波浪補(bǔ)償器可能快速下降,引起振動。當(dāng)發(fā)生這種情況時,自動控制器將檢測到波浪補(bǔ)償器行程的快速變化,自動控制器將硬鎖波浪補(bǔ)償器,快速提升耙頭至安全深度,再下放耙頭,待波浪補(bǔ)償器設(shè)定壓力大于油缸壓力時,解鎖波浪補(bǔ)償器,繼續(xù)按照控制器設(shè)置和控制邏輯進(jìn)行動作。
2.2 耙臂水平角度控制
2.2.1控制原理
耙頭橫向控制確保耙頭不超過預(yù)先設(shè)定的橫向限制。當(dāng)耙頭橫向位置有可能超過設(shè)定時,自動控制器鎖定波浪補(bǔ)償器,控制耙頭絞車上升,將耙頭拉離地面,回至限制設(shè)定范圍內(nèi)位置。
耙頭橫向控制通過調(diào)節(jié)鋼絲繩角度,將耙頭橫向位置保持在橫向角度最大限定值范圍內(nèi)。水平角度作為施工安全保護(hù)控制,橫向水平角度基本設(shè)定值在-18°~+18°,詳細(xì)情況見圖4。
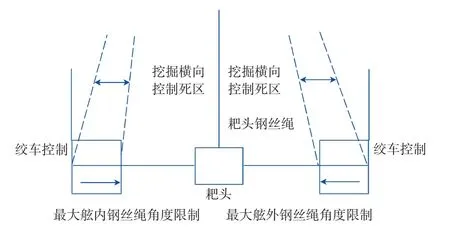
圖4 耙臂水平角度控制Fig.4 Horizontal angle control of suction tube
2.2.2控制方式
當(dāng)耙頭邊沿橫向位置超過設(shè)定挖泥舷內(nèi)鋼絲繩角度最大限定值與橫向控制死區(qū)時,自動控制器將動作,自動硬鎖波浪補(bǔ)償器,控制耙頭絞車上升,直至耙頭位置回到自然垂直狀態(tài)。
自動控制器通過水平角度傳感器實時檢測耙頭橫向移動速度,當(dāng)耙頭橫向移動速度大于設(shè)定值時,自動控制器將動作,自動鎖定波浪補(bǔ)償器,控制耙頭絞車上升,直至耙頭位置回到自然垂直狀態(tài)。自動控制器根據(jù)不同的模式,選用耙頭深度控制或波浪補(bǔ)償器中間位置控制模式控制耙頭絞車[7]。
2.3 耙臂垂直角度控制
2.3.1控制原理
耙臂垂直角度控制分為3 種控制方式:萬向節(jié)角度控制、下耙臂角度控制、安全限制控制。
萬向節(jié)角度控制和下耙臂角度控制使耙臂在挖泥過程中保持正確的姿態(tài),在疏浚挖泥過程中可以選擇其中一種自動控制模式。安全限制是防止萬向節(jié)受損。耙頭絞車和耙中絞車協(xié)同控制,實現(xiàn)耙臂平穩(wěn)控制。
2.3.2控制方式
萬向節(jié)角度控制模式下,當(dāng)上耙臂與下耙臂垂直角度差大于萬向節(jié)手動設(shè)定值和耙臂角度控制死區(qū)總和時,自動控制器將動作,控制耙中絞車上升,直到上耙臂與下耙臂垂直角度差小于萬向節(jié)手動設(shè)定值。萬向節(jié)角度根據(jù)疏浚施工深度不同,其設(shè)定值也可進(jìn)行調(diào)整,控制過程中設(shè)定相應(yīng)控制死區(qū)(0.1°)。此時耙頭深度將發(fā)生改變,耙頭絞車將根據(jù)自動控制功能動作。當(dāng)下耙臂與上耙臂垂直角度差大于萬向節(jié)手動設(shè)定值和耙臂角度控制死區(qū)總和時,自動控制器將動作,控制耙中絞車下降,直到下耙臂與上耙臂垂直角度差小于萬向節(jié)手動設(shè)定值。此時耙頭深度將發(fā)生改變,耙頭絞車將根據(jù)自動控制功能動作。
下耙臂角度控制模式下,當(dāng)下耙臂對地角度大于下耙臂手動設(shè)定值和下耙臂角度控制死區(qū)總和時,自動控制器將激活,控制耙中絞車下降,直到下耙臂對地角度小于下耙臂手動設(shè)定值。下耙臂角度根據(jù)疏浚施工深度不同,其設(shè)定值也可進(jìn)行調(diào)整,控制過程中設(shè)定相應(yīng)控制死區(qū)(0.1°)。此時耙頭深度將發(fā)生改變,耙頭絞車將根據(jù)自動控制功能動作。當(dāng)下耙臂對地角度小于下耙臂角度手動設(shè)定值和下耙臂角度控制死區(qū)總和時,自動控制器將激活,控制耙中絞車上升,直到下耙臂對地角度大于下耙臂角度手動設(shè)定值。此時耙頭深度將發(fā)生改變,耙頭絞車將根據(jù)自動控制功能動作。
安全限制模式下,為保護(hù)耙臂的中間部分(萬向節(jié)),控制器需對上耙臂、萬向節(jié)和下耙臂進(jìn)行安全角度限制,當(dāng)上耙臂、中間管、下耙臂垂直角度超過限定范圍時,自動控制器將動作,停止所有耙臂絞車自動動作并發(fā)出報警,所有耙臂絞車轉(zhuǎn)為手動控制。
3 結(jié)語
本文從3 個方面展開耙臂水下施工安全控制技術(shù)研究,對耙臂水下施工工序進(jìn)行分析,形成一套完整的耙臂水下施工控制技術(shù),可實現(xiàn)耙臂水下施工安全保護(hù)及水下自動施工功能。波浪補(bǔ)償器位置控制是為了將耙頭更好地貼近泥面,保證施工過程質(zhì)量;水平和垂直角度控制可將耙臂保持在設(shè)定范圍內(nèi),保證施工安全。該技術(shù)已在“新海虎8 輪”、“新海虎4 輪”、“航浚4019 輪”、“航浚3011 輪”等耙吸挖泥船實船應(yīng)用,應(yīng)用效果顯著,該技術(shù)能夠高效、安全、穩(wěn)定地保持耙臂在水下正常施工,技術(shù)相較于人工更靈敏、高效,未來可推廣至新船建造及舊船改造。
猜你喜歡
建材發(fā)展導(dǎo)向(2022年18期)2022-09-22 07:13:20
建材發(fā)展導(dǎo)向(2022年12期)2022-08-19 02:33:10
建材發(fā)展導(dǎo)向(2022年10期)2022-07-28 03:04:36
建材發(fā)展導(dǎo)向(2021年22期)2022-01-18 06:12:46
建材發(fā)展導(dǎo)向(2021年19期)2021-12-06 03:20:50
建材發(fā)展導(dǎo)向(2021年18期)2021-11-05 09:19:50
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:58
建材發(fā)展導(dǎo)向(2021年9期)2021-07-16 07:11:36
上海建材(2017年4期)2017-10-16 01:33:34
中國房地產(chǎn)業(yè)(2016年2期)2016-03-01 01:25:48