基于物聯網技術的密閉室內元器件識別定位方法
2024-01-31 13:23:28唐曉瀾賈杰王成林孫國慶阮玲玉
電子制作 2024年2期
唐曉瀾,賈杰,王成林,孫國慶,阮玲玉
(1.西京學院 電子信息學院,陜西西安,710123;2.河南省睿卡機器人制造有限公司,河南新鄉,453000)
0 引言
傳統的元器件識別方法,一般采用自動識別并輔助人工定義特征的方式,對元器件的狀態進行識別,但是在維護檢修的過程中,還需要對元器件進行定位,以便快速解決問題的發生。因此,傳統對元器件定位識別的技術就存在了定位精度低的問題。雖然結合多種算法的運用,可以適當提高定位精度,但是算法的疊加使得計算過多,減慢定位時效。所以在現今的研究中,雷文桐等人[1]基于深度學習的方法,對元器件進行視覺上的識別和定位技術的研究,通過算法運用提高識別定位精度;夏玉果等人[2]的研究,通過多尺度注意力機制分析電子元器件深度遷移識別方法,提高了對元器件的識別精度。上述的研究中,最終目的都是為了提升精度,優化算法,因此本文基于物聯網技術對密閉室內的元器件進行定位識別,在闡述本文觀點的同時為其他相關研究提供一定的參考。
1 基于物聯網技術的密閉室內元器件識別定位方法
■1.1 基于物聯網技術傳感元器件信息
在物聯網技術下的元器件信息的收集,是作為技術整體運用中的一小部分的應用。在物聯網技術體系的架構中,通過上層的應用協同,實現數據的傳輸,而下層作為采集和傳輸的主要路徑,能夠基于傳感技術實現信息的動態獲取。
其中對于密閉室內元器件信息的智能傳感技術,是物聯網運用中的一個重要部分,同時與傳統傳感技術的結合,能夠將傳感器原有的集成技術、微型處理等手段相結合,并且形成高效的物理傳感終端設備。因此本文所采用的智能傳感設備,具有自適應的小型化特征,能夠在密閉室的獨特環境中發揮作用[3]。
傳感器在密閉室內信息傳輸時,根據密閉室內元器件的運行電荷進行計算,獲得元器件的微分電流,并通過負載電阻形成回路中的傳感輸出電壓。在傳感器進行信號電壓值的輸出時,與元器件的電場強度成正比,根據密閉室內有限區域的電場強度與導體電位所成的比例關系,能夠得到傳感器的信息與電位的連接信息,二者之間的關系受到傳感器和導體之間的影響,并獲得傳感器與元器件之間的信息,并對信號進行輸出,通過輸出信號對元器件的信息進行分析。
■1.2 提取元器件信息圖像特征
在物聯網技術下傳感器的信息傳感的基礎上,分析傳感得到的圖像信息,通過對目標的檢測和學習,分析元器件與密閉室的區別,實現對元器件的識別。本文所用到的圖像特征的提取相關性如圖1 所示。
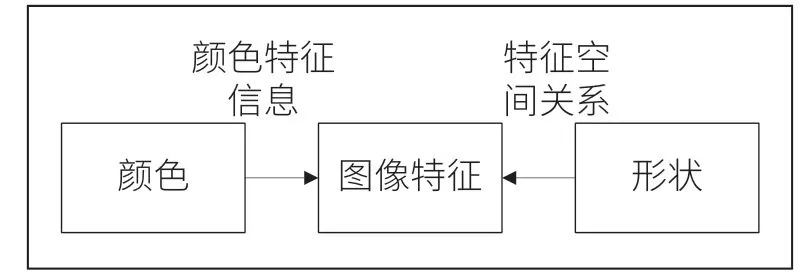
圖1 圖像特征提取的相關性
為了對傳感器的傳感信息進行特征的提取,本文通過圖像數據的傳感要求,結合計算機的應用,采用相應的特征提取算法,采用顏色特征的方式提取元器件的圖像特征。在顏色空間中,利用顏色空間的三原色分量進行顏色的組成,通過對圖像領域中的陰極射線管等對圖像進行顯示[4]。
在顏色直方圖的應用中,通過圖像的色調排布來分別顏色空間中的目標相似度,在顏色的匹配中對元器件進行識別。將傳感器的識別圖像進行區域的劃分,那么可以獲得對應的表達式:
式(1)中,pi表示顏色直方圖;ki表示圖像中的第i個顏色,對式(1)進行歸一化處理,得到:
式(2)中,M表示圖片中的像素劃分個數。那么可以通過對應的顏色直方圖獲得顏色矩,通過顏色矩的特征描述,能夠對傳感圖像中的分布信息等進行體現。
■1.3 融合相機成像原理識別元器件
在對上述的元器件信息進行特征提取后,能夠根據已有的圖像信息特征,分析元器件的坐標位置,本文通過相機成像原理,通過幾何標定的方式,將圖像特征中的坐標以實際坐標的形式進行呈現。相機成像原理如圖2 所示[5]。
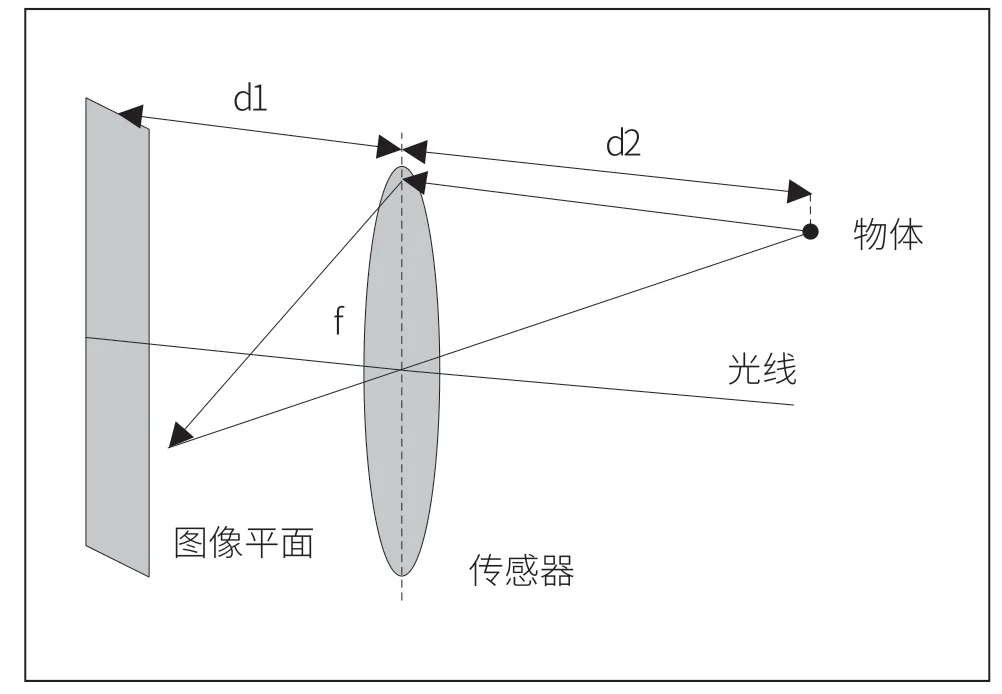
圖2 所使用的相機成像原理圖示
圖2 中,d1表示圖像平面與傳感器之前的距離;d2表示傳感器與物體之間的距離;f表示相機的焦距,那么上述的原理可以通過下式來表達:
根據相機成像原理對元器件進行分析時,可以假設相機的孔徑為無窮小數值,并在理想狀態下,假定只有孔中只有光線的透過,又根據相機自身的成像特性,為了平面的正序性,將圖像平面置于傳感器的鏡頭前方,那么將物體的實際高度進行設定,并根據物體在傳感器鏡頭中的映射,根據定理,表現出元器件的投影公式:
式(4)中,h1表示物體在傳感器鏡頭中的映射高度。設定相機的坐標系,將其與本文所設定的實際坐標系進行統合,得到對應的元器件識別標定矩陣:
式(5)中,(x,y,z)表示元器件的投影坐標;(X,Y,Z)表示元器件的實際坐標;(u,v)表示圖像坐標系的主點坐標。那么通過測定坐標系數據,對密閉室內的元器件進行識別[6]。
■1.4 實現密閉室內元器件識別定位
基于物聯網技術的密閉室內元器件識別定位方法具有多重優勢。首先,該方法能夠實現實時監測和遠程管理,使用戶可以隨時隨地獲取元器件的狀態數據,并采取相應的措施。其次,通過大數據分析和預測維護,該方法能夠利用收集到的信息數據進行深入挖掘和分析,預測元器件的運行狀況和壽命,提高維護效率。此外,通過自動化和智能化操作,該方法減少了人工干預和誤操作的風險,提高了工作效率。最后,由于物聯網技術具有較強的系統集成和擴展性,該方法可以與其他系統無縫集成,構建統一的監測和管理平臺,并根據需求進行靈活改進和拓展。綜上所述,基于物聯網技術的密閉室內元器件識別定位方法為實現精確識別定位、提高運維效率和可靠性、降低成本和風險等方面帶來了重要優勢,并在智能制造和工業自動化發展中發揮著重要作用。根據上述流程中的智能傳感,本文設計了密閉室內元器件的識別定位方法。該方法主要包括以下幾個步驟:
(1)利用小型的多傳感器集成終端來收集元器件的信息。這些傳感器可以監測元器件的各種參數和狀態,如溫度、濕度、電流等。通過多傳感器的數據采集,可以獲取全面的元器件信息。
(2)通過對所收集的傳感信息進行分析,可以提取元器件的圖像特征。其中,顏色空間和形狀空間是常用的空間定位方法,可以用于對元器件的狀態進行識別。通過比較元器件的特征與預設模型的匹配程度,可以確定元器件是否處于正常工作狀態或存在故障。
(3)結合物聯網技術來構建元器件的識別結構。利用物聯網技術,可以通過元器件的信息傳感以及相機成像原理來確定元器件的故障信息。通過將元器件與物聯網連接,可以實現實時監測元器件的狀態,并及時傳輸相關信息。
(4)在獲得元器件的成像數據后,為了保證定位的準確性,需要對信息進行標定和處理。通過計算相機與傳感器之間的距離,可以進行圖像的二值化處理,并提取對應的信息坐標。然后,通過計算元器件的中心像素,并考慮所測定的誤差值,可以對成像數據進行修正,以滿足實際定位的要求。基于上述的識別定位流程,能夠在物聯網技術下,實現對密閉室內元器件的識別定位[7]。
本文設計的密閉室內元器件識別定位方法利用智能傳感和物聯網技術,通過收集和分析傳感信息、提取圖像特征以及結合物聯網技術,能夠實現對元器件狀態的準確識別和故障信息的確定。該方法在實現密閉室內元器件的識別定位方面具有潛力,并為未來智能制造和工業自動化領域的發展提供了一種高效可行的解決方案。
2 實驗論證
■2.1 實驗說明
為了對密閉室內元器件的識別定位方法進行研究,本文基于物聯網技術,分析了元器件的識別定位方法。在對本文研究方法進行測定的過程中,基于仿真實驗環境,構建元器件的識別定位流程,通過本文方法與傳統方法的對比,驗證本文所研究方法的優勢性。為了最后實驗數據表述的簡潔性,本文將所研究的基于物聯網技術的元器件識別定位方法設置為實驗組,傳統方法則為本次精度檢測實驗的對照組。
在具體的實驗元器件的分析中,本文選擇了四種元器件進行方法驗證的比較,分別為X1、X2、CPU 和PCI 元器件,上述四種元器件置于密閉室內,通過實驗組和對照組的方法進行識別定位精度的檢測。
■2.2 實驗準備
本次的識別定位方法測定實驗中,將根據已有元器件和傳感器的安裝,通過對元器件信息的傳感,獲得元器件的圖像坐標系,并根據原理對元器件目標進行定位。實驗中對元器件識別定位的流程如圖3 所示。
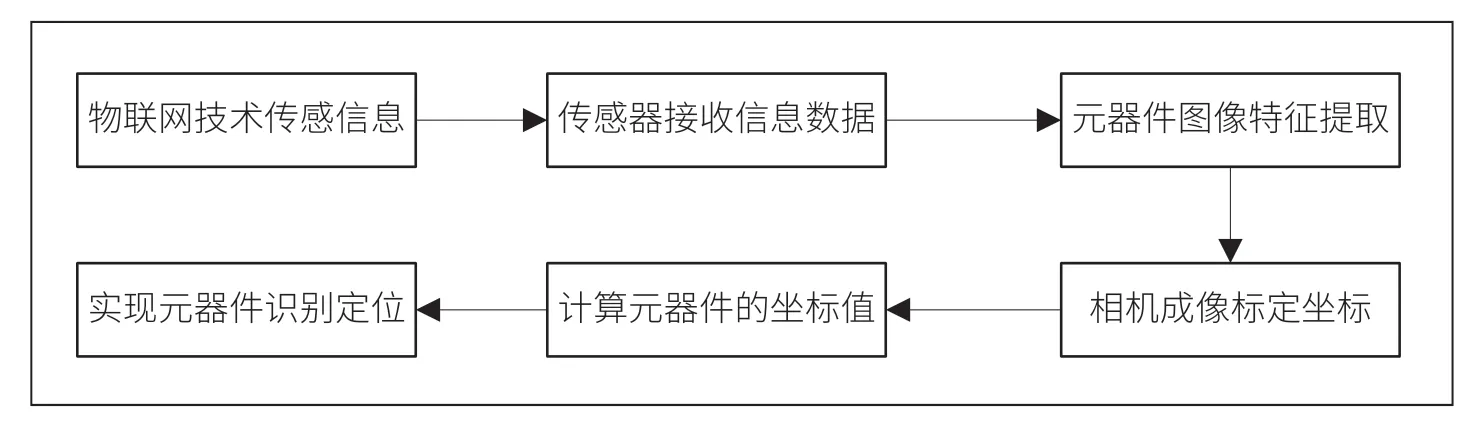
圖3 元器件識別定位流程
根據圖3 中的識別定位流程,設置實驗過程。
■2.3 實驗結果
根據上述實驗流程,獲得本次密閉室內的元器件定位結果,實驗組與對照組的對比定位數據分別如表1 和表2 所示。

表1 實驗組密閉室元器件定位情況
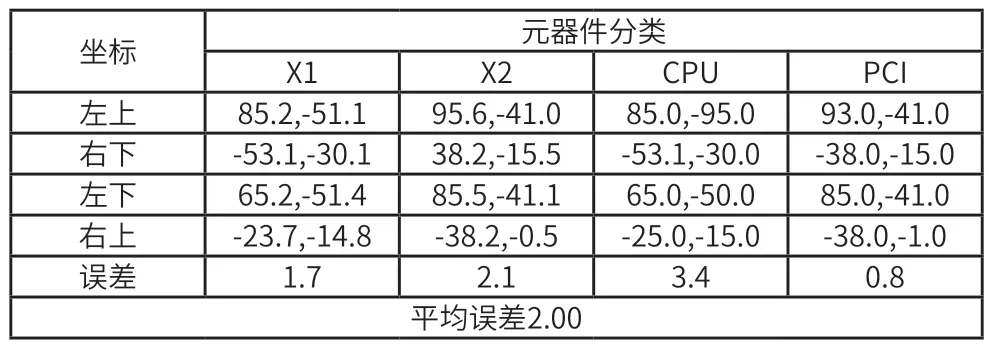
表2 對照組密閉室元器件定位情況
表1 中的數據顯示了實驗組對密閉室元器件的定位情況。對照組的定位數據如表2所示。
根據表1 和表的2 的數據對比分析可得,實驗組元器件的識別定位平均誤差為1.05,對照組元器件的識別定位平均誤差為2.00,因此實驗組的定位精度相對來說更高一些。在CPU 元器件的識別定位中,實驗組和對照組都存在識別定位誤差較大的情況,根據實驗復盤分析出,由于元器件的傳感器的;連接不夠靈敏,導致信息傳輸存在一定的誤差,經過優化后的元器件定位識別精度均獲得一定的程度的提高。
3 結束語
本文對基于物聯網技術的密閉室內的元器件識別定位方法進行了研究,通過物聯網傳感技術獲得元器件的數據信息,然后通過圖像特征的提取以及相機成像原理的運用,實現對元器件的識別定位。但是本文仍然存在一定的不足之處,在實驗過程中由于對元器件和傳感器的連接出現一定的錯誤,導致實驗中存在的誤差較大,經過驗證修復后,對此問題進行了改善。
猜你喜歡
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
祝您健康(1987年2期)1987-12-30 09:52:28