PLC 在反沖洗廢水回用中的應用
2024-01-31 13:23:30張亞軍郭來功
電子制作 2024年2期
關鍵詞:液位
張亞軍,郭來功
(安徽理工大學 電氣與信息工程學院,安徽淮南,232001)
0 引言
淮北市某水廠現有生產工業清水規模為23 萬噸/天,采用“反應+沉淀+過濾+消毒”工藝,原水經處理后加壓輸送至用戶。為了保護環境,節約水資源,該水廠對生產廢水進行回用。生產廢水主要包括沉淀池的排泥水和濾池反沖洗時產生的反沖洗廢水,這類廢水一般約占水廠總進水量3%~8%[1]。該水廠近幾年來提供的工業清水年均供水約2030 萬噸,日供水約5.6 萬噸,生產過程生產廢水每年約155 萬噸,其中濾池反沖洗廢水約130 萬噸,沉淀池排泥水約25 萬噸。在該水廠回用生產廢水的過程中采用手動控制的方式,為了實現對生產廢水回用過程的自動化控制和優化,本文采用PLC 對回用水池進行控制,并結合實時的監控畫面,改善了回用廢水過程的自動化控制。
1 反沖洗廢水回用工藝
該水廠濾池反沖洗廢水回用水池和沉淀池排泥水的排泥池采用分開構建的方式,將濾池反沖洗廢水和沉淀池排泥水分開收集,經排泥池排出的排泥水經過濃縮和壓濾脫水處理成泥餅[2]。在污泥濃縮時的上清液回收至回用水池,回用水池經一段時間沉淀后的上清液回用至沉淀池,實現生產廢水的回用,其工藝如圖1 所示。
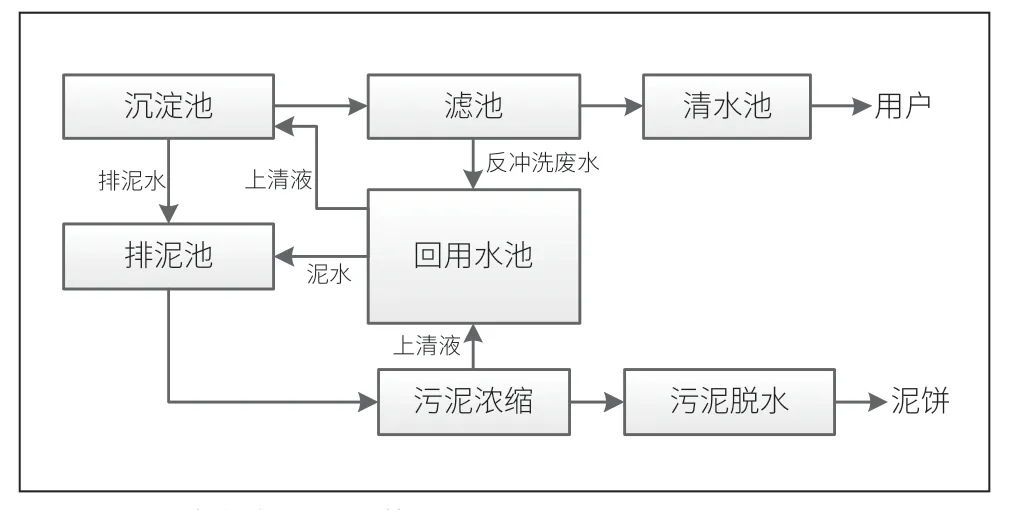
圖1 反沖洗廢水回用工藝
反沖洗廢水回用水池采用的是雙池結構,其水池結構如圖2 所示,兩個水池的進水口有電動閥門,可以通過閥門控制廢水進入的水池,每個水池都分別配有一個排水泵和一個排污泵。
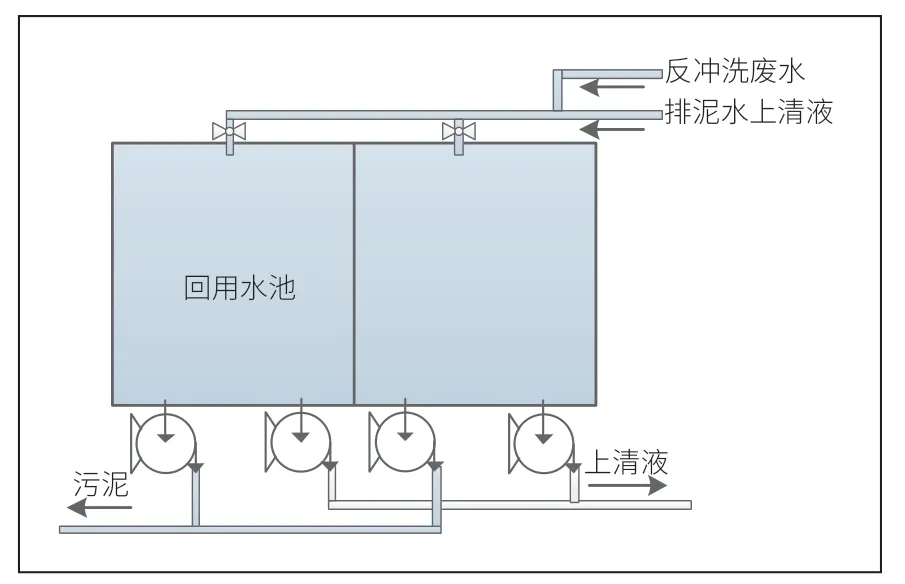
圖2 回用水池結構
2 反沖洗廢水回用系統
反沖洗廢水回用系統主要包括三個層面如圖3 所示,監控層是在中控室操作員可以通過監控畫面監測系統的運行和運行過程中的數據,并可以遠程控制現場設備以及對故障報警進行預處理[3]。PLC 控制層是將現場儀器采集的數據信息傳遞到PLC 中,經過程序設計的處理后,再輸出指令對現場設備進行控制。現場設備層有排水泵、排污泵、步進電機、濁度儀和超聲波液位計,各自分布在工藝現場中負責數據信息采集和進行廢水回用運行。回用水池主要進水是反沖洗廢水,其次是排泥水濃縮過程的上清液,針對回用水池的排水排泥,配備了兩臺排水泵和兩臺排污泵。回用水池排水泵旁裝有步進電機帶動的可上下移動的帶平臺的滑桿,可移動的平臺上固定有濁度儀和排水泵進水口軟管。濁度儀采集到的濁度值實時反饋到PLC,PLC 根據當前濁度值和設定濁度值比較出差值,然后通過PLC 對差值信號進行PID運算,運算結果通過PLC 輸出控制驅動器,實現對步進電機的控制,從而控制濁度儀的位置,達到固定濁度回用上清液的目的[4]。
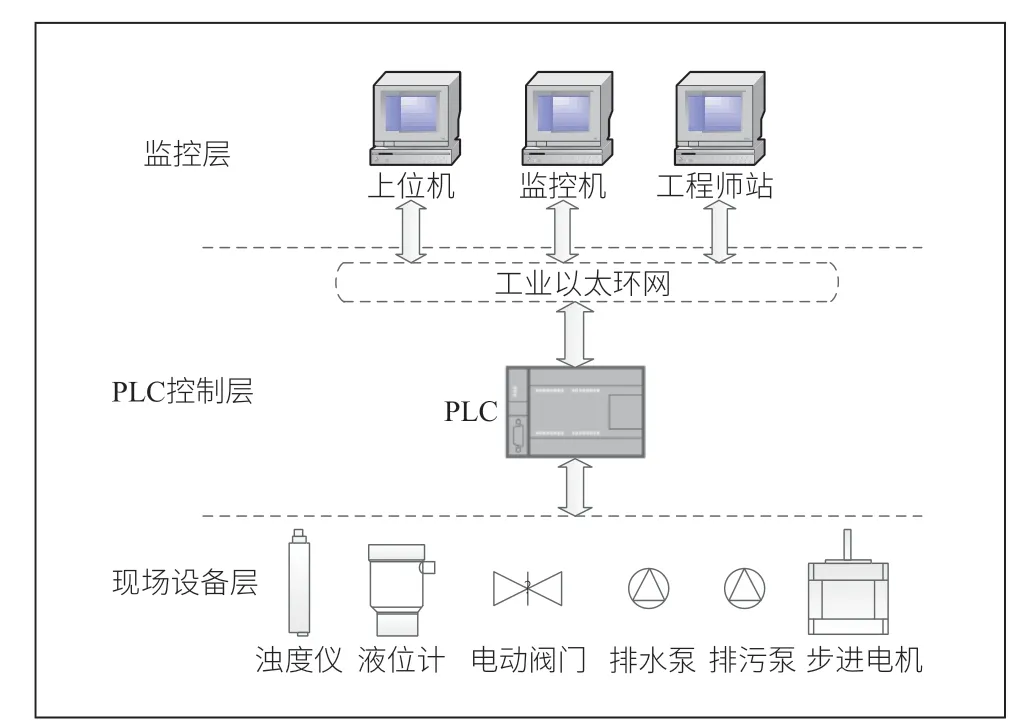
圖3 反沖洗廢水回用系統圖
系統配有三種控制方式:自動控制、現場手動控制和遠程控制[5]。現場手動控制是通過回用水池旁的現場按鈕實現設備的啟動與停止;遠程控制是通過中控室的監控計算機進行遠程操作回用水池設備,可以控制現場設備的啟停;自動控制是PLC 控制器根據程序設定自動運行反沖洗廢水回用系統。
3 反沖洗廢水回用硬件設計
■3.1 PLC 的設計
在本次反沖洗廢水回用系統中,選用西門子S7-1200系列的PLC 作為控制器,其型號為CPU 1214C DC/DC/DC。該PLC 具有高速脈沖輸出可以驅動控制步進電機的運行,CPU 機身配有PROFINET 以太網接口,可以實現HMI、上位機和其他PLC 之間的通信,并擴展RS485 通訊模塊CM1241,實現對數據的采集。
■3.2 濁度儀的設計
該水廠在對濾池進行6 分鐘反沖洗時,測得反沖洗過程反沖洗廢水濁度值約在22~300NTU 之間。沉淀池的排泥水在工作期間測得濁度約為450NTU,故在此反沖洗廢水回用中濁度儀可選擇0.01~3000NTU 量程,精度小于測量值的±5%,型號為聯測SIN-PTU-8010。濁度儀的測量原理是通過發射高強度的單色光,光束穿過水體遇到水中的微粒產生散射光,通過測量垂直于光束方向的散射光強度計算水體的濁度。由于濁度儀工作原理是激光散射法,工作時處于水中,而且沉淀池排泥水的濁度較大,長期工作濁度儀發散光束的鏡面會附著許多雜質,影響濁度儀的測量精度。所以選擇了配有自清洗功能的濁度儀,根據設定可以進行手動自清洗,或者固定時間間隔進行自動自清洗。
■3.3 超聲波液位計的設計
根據查閱該廠對回用水池的構建資料,可知回用水池深度為5m,故在本系統中選用超聲波液位計的量程為0~10m,測量精度為0.5%FS,型號為美控MIK-DFG。采用的是分體式的超聲波液位計,配有RS485 通信,可實現多路測量和現場讀數。由于溫度對超聲波的傳播有影響,并且液位數據直接影響著水泵的啟停,故選擇配有智能溫補功能的超聲波液位計,保證測量精度。
■3.4 步進電機的設計
步進電機是用于負責滑桿上平臺進行升降的動力源,可升降的平臺上固定有濁度儀和排水泵進水軟管,通過軟管在水體中的升降實現固定濁度值回用上清液,提高了回用水的質量,降低了回用反沖洗廢水時對原水的沖擊。由于濁度儀重量0.8kg,加上和軟管固定在平臺上,可選用力矩為4.5N·m,步距角為1.8°,額定電流為6.0A,型號為達川智能86HB80-401A 的步進電機。PLC 和步進電機之間需要連接驅動器進行方向和轉速控制,配套驅動器型號為DMA860-S,該驅動器具有多種電流與細分設置,支持交直流寬電壓輸入(VAC:20~80V、VDC:24V~110V),采用矢量控制技術,高速且力矩大,內置參數自整定功能,光隔離差分信號輸入,具有短路、欠壓、過壓等保護功能。PLC和驅動器的基本控制接線如圖4 所示,24V 直流電為PLC的輸出端口供電,輸出點Q0.0 輸出脈沖信號連接驅動器的PUL+,輸出點Q0.1 輸出方向控制信號連接DIR+,由于采用的是西門子S7-1200 系列的PLC 來發出脈沖信號,所以驅動器采用的是共陰極接法。驅動器的供電可選用直流電24V~110V 或者交流電20~80V。
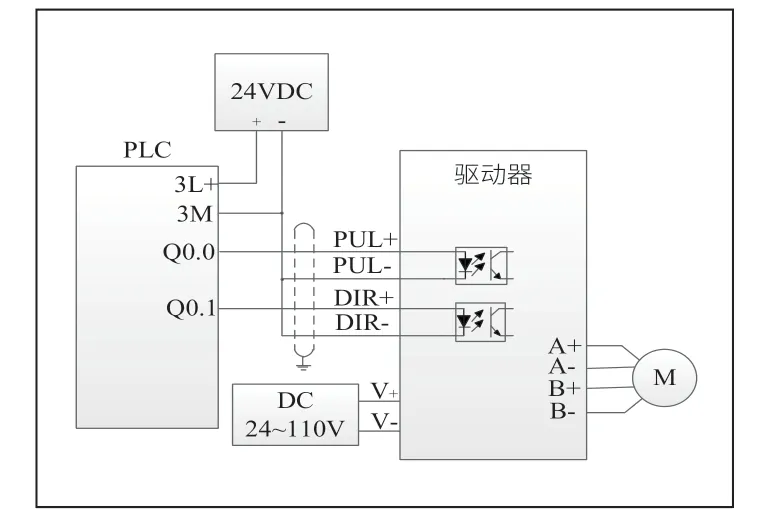
圖4 驅動器控制接線
■3.5 水泵控制主回路
由于采用的是能輸出高速脈沖的晶體管輸出型PLC,其輸出端是24V 直流電,不能直接驅動交流接觸器控制三相380V 電動機運行,所以需要中間繼電器來控制交流接觸器,起到弱電控制強電的作用,而且可以進行電氣隔離。每個排水泵和排污泵的主回路接線都如圖5 所示,圖中QF 是斷路器可以控制整個主回路電路,電路發生故障時,可以自動切斷線路保護電路中的其他設備。FU1 是熔斷器在水泵主控制回路中發生短路或過流時可以保護電路。FR1 是熱繼電器主要對水泵電機起過載保護作用。本文中選用的PLC 輸出點為24V 直流電,可以控制中間繼電器的線圈KA1 得電,中間繼電器的一組常開觸點KA1 和交流接觸器線圈KM1 一同接入380V 交流電回路中,交流接觸器線圈KM1 得電,交流接觸器常開觸點KM1 吸合,可以控制水泵的啟動。采用中間繼電器不僅可以解決PLC 輸出不能直接控制交流接觸器的問題,而且還可以起到低電壓控制高電壓的作用。
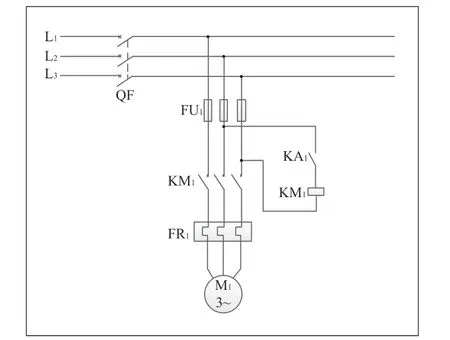
圖5 水泵主回路接線圖
4 反沖洗廢水回用軟件設計
PLC 軟件采用的是西門子TIA Portal V15.1,該軟件能夠與S7-1200PLC實現契合[6]。反沖洗廢水回用系統根據回用水池的液位和濁度信息,對水泵工作進行控制。根據需要PLC 控制方式包括:自動控制、現場手動控制和遠程控制。遠程控制是中控室通過上位機對系統的運行進行監控和操作控制,可以對突發的報警故障進行遠程預處理。一般系統正常運行時為自動控制,自動控制流程如圖6 所示,包括水池切換程序,提升機工作到設定濁度液位程序。主要過程為有水池液位過高或者液位過低會切換水池進行廢水收集,切換水池后高液位的水池進行一定時間的沉淀,達到沉淀時間后提升機移動升降平臺到設定濁度液位進行上清液回用。
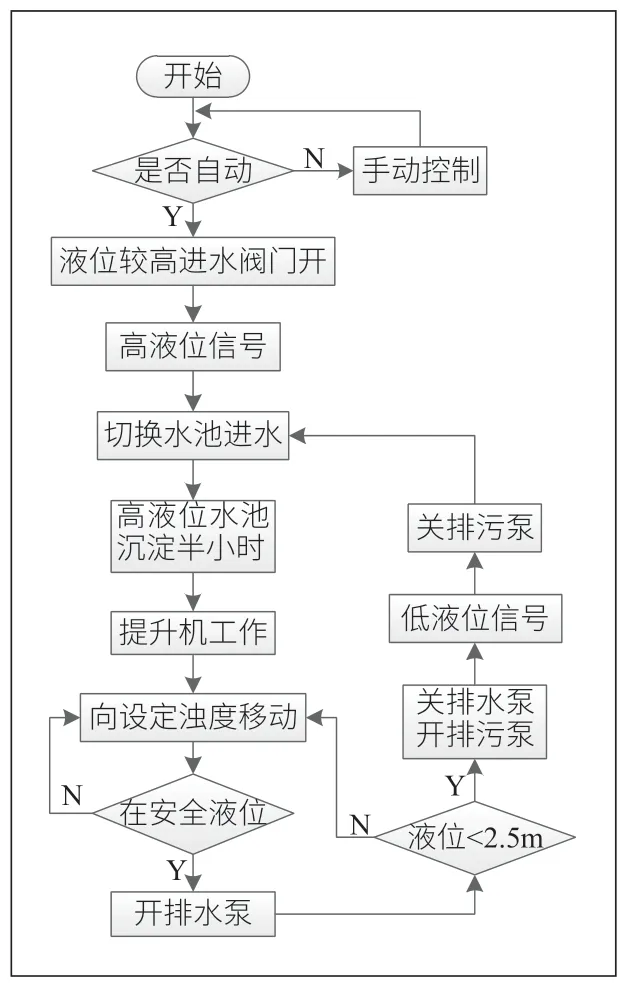
圖6 工作流程
(1)回用水池切換程序。系統上電后會默認打開兩個回用水池中液位相對較高的進水閥門,在有水池達到高液位信號或者有水池達到低液位信號,通過關閉高液位水池進水閥門,打開低液位水池進水閥門,切換水池進行廢水收集。
(2)提升機工作程序。固定液位回用上清液,不僅需要的沉淀時間長,而且回用上清液的濁度較大,與原水混合產生的沖擊較大。采用升降平臺進行回用上清液過程為:在水池切換后,高液位水池進行半小時的沉淀,沉淀時間過后會給提升機工作信號,使升降平臺找到設定濁度的液面,在具備開泵安全液位范圍內開啟排水泵回用上清液。
5 上位機監控畫面設計
上位機通過以太網和控制器完成通信,進行數據間的讀取和設定,通過在WinCC RT Advanced 上完成監控畫面的制作,監控畫面如圖7 所示。在系統運行時可監控系統的運行情況,并且可以在監控畫面上直接讀取到一些實時顯示的數據。監控畫面上設置了可以點擊的手動按鈕,方便在上位機實現遠程控制。
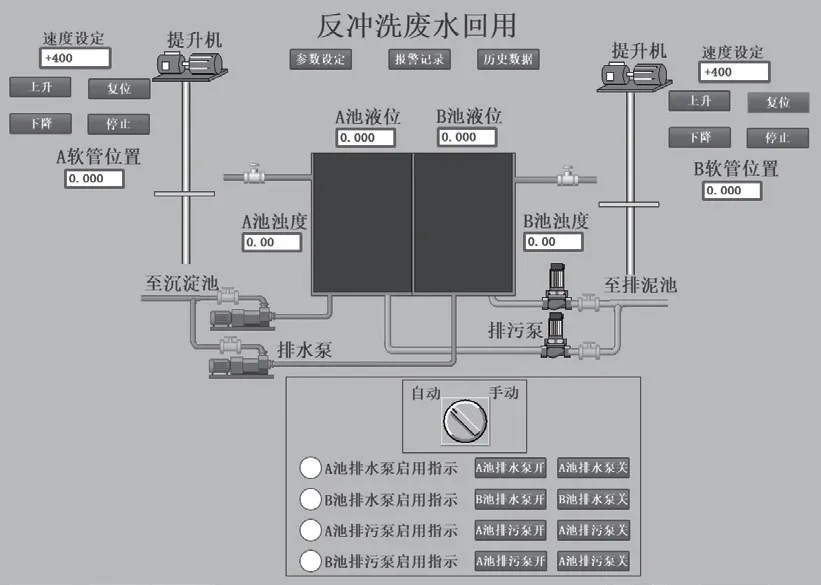
圖7 監控畫面
6 總結
本反沖洗廢水回用系統采用西門S7-1200 系列PLC 作為控制器,結合現場設備和上位機監控畫面,完成了對反沖洗廢水回用系統的設計,實現了對反沖洗廢水回用過程的自動化控制,提高了反沖洗廢水回用時上清液的濁度,降低了回用時與原水混合時的沖擊,提高了制水的質量。
猜你喜歡
機床與液壓(2022年12期)2022-09-15 06:26:06
石油工業技術監督(2022年7期)2022-08-18 03:28:54
選煤技術(2021年3期)2021-10-13 07:33:38
測控技術(2018年12期)2018-11-25 09:37:22
測控技術(2018年9期)2018-11-25 07:45:00
石油化工自動化(2018年5期)2018-11-14 02:34:30
電子測試(2017年11期)2017-12-15 08:57:07
設備管理與維修(2016年5期)2016-03-16 02:20:47
汽車維護與修理(2015年2期)2015-02-28 12:15:41
中國機械(2014年13期)2014-04-29 23:07:03