工廠化水產養殖微濾機故障診斷系統
2024-02-05 07:25:20肖瑞超
安徽農學通報 2024年2期
肖瑞超
(河南工業貿易職業學院,河南鄭州 451191)
工廠化水產養殖是利用現代化的生產技術和設備,集電子技術、自動化和智能化等現代手段,將傳統養殖方式轉變為現代化的、集約化的方式,在半封閉或全封閉的條件下,對養殖生產全過程進行自動化管控的一種生產模式[1]。工廠化水產養殖過程中的水體污染和維護成本是行業當前面臨的主要挑戰之一[2]。在工廠化水產養殖中,養殖水體的廢物主要由殘餌、排泄物和次級代謝物等組成[3],排泄物、殘餌和生物團等懸浮物和固體物,增加了養殖水體的渾濁度,容易造成生物濾器堵塞,影響系統的性能和水產健康養殖。微濾機是工廠化水產養殖過程中不可缺少的設備之一,能夠有效地改善水質和養殖環境,保障養殖水產的安全。微濾機結構復雜,其在運行中常會出現諸如噪聲大、溫度過高、濾網堵塞等各種故障,對其正常運行以及提高生產效率和經濟效益都有較大影響[4]。如何準確、快速地對這些故障進行診斷和解決,是工廠化水產養殖微濾機研究的重要方向之一。為保障水產養殖的正常運行,提高工廠化水產養殖微濾機的運行效率和安全性,本研究設計了工廠化水產養殖微濾機故障診斷系統,并構建了基于經驗熵決策樹的模型,實現了微濾機故障的快速診斷,為工廠化水產健康養殖提供參考。
1 微濾機類型及工作原理
微濾機又稱固體顆粒分離器[5],是一種利用微孔濾材對水體進行過濾和凈化的設備,主要由濾材、進水口、出水口、反沖洗裝置和管道等部分組成。
1.1 微濾機的類型和作用
養殖廢水處理技術,特別是固體懸浮物的處理,主要有物理、生物和化學等類型的處理方法[6]。其中,應用微濾機處理固體懸浮物屬于物理類型的處理方法。微濾機的主要類型有轉鼓式、轉盤式、格柵式和履帶式等[7-8]。
目前,轉鼓式微濾機應用較廣泛,適用于分離液體中的微小懸浮物質,分離固、液兩相。轉鼓式微濾機主體工作部件是轉鼓,由傳動裝置、高壓反沖洗裝置、支撐框架、覆蓋于框架上的濾網和中心軸構成,結構如圖1所示[9]。其濾網是由不銹鋼材料的外濾網和尼龍材料的內濾網組成的雙層網。轉鼓式微濾機按照不同的分類方式可以分為不同的類型[9](表1)。

表1 轉鼓式微濾機類型

圖1 微濾機結構示意
轉鼓式微濾機與其他固液分離方法的不同之處在于過濾介質空隙小,在篩網回轉的離心力作用下,借助較低的水力阻力,能高流速截留住懸浮固體,耗能低、使用和維護方便、占地少和適用性強。轉鼓式微濾機具有通用性好、自動化程度高、需要勞動力少、水頭損失低、維護容易和占地空間小等優勢。其缺點為需要高壓水射流沖洗,耗能大;處理效率低、成本高;使用過程中易造成大顆粒的二次破碎產生的大量微小顆粒,會降低精過濾和生物處理的效率等[10]。
微濾機的主要作用有去除殘餌、糞便、懸浮物、泥沙、藻類、生物黏泥、色度和異味等,從而提高養殖水體的質量和純度。
1.2 微濾機的工作原理
目前轉鼓式微濾機應用較為廣泛,其工作原理為養殖水體從進水口進入轉鼓內,通過安裝在轉鼓表面的濾網進行過濾,固體顆粒物被濾網截留,均勻地分布在反向旋轉的濾筒的濾網上,經過濾后的干凈水從出水口流出[10]。當濾網上的污物聚集到一定數量時,會引起濾網透水量下降,導致水位上升。水位上升到設定的高水位時,為防止篩網堵塞,濾筒外設置的高壓反沖洗裝置、液位自動控制感應系統、反清洗水泵和電機同時開啟,進行自動反清洗,在高壓水射流扇形噴射下疏通濾網。堵塞在濾網上的懸浮物在高壓水的沖洗下,流入污物收集槽再經排污管排出。濾網清洗干凈后,透水量上升,水位下降,當水位降至設定的低水位時,液位自動控制系統再次感應,反清洗水泵和電機停止工作。目前國內工廠化水產養殖系統中,轉鼓式微濾機普遍使用120 目濾網[7]。在大多數微濾機裝置中,一旦固體物堵塞過濾網,滾筒即開始轉動,高壓噴射水(從滾筒的外側)將這些固體物沖入收集槽中。
轉鼓式微濾機的過濾性能與轉鼓上的濾網孔徑大小有著直接的關系,其處理效率由濾網數量、濾網孔徑、反沖強度、顆粒含量和水力負荷率等參數決定。但是濾網孔徑并非越小越好,孔徑越小就越容易發生堵塞,反沖洗頻率也就越高,電耗和水耗就會隨之增加,使得微濾機的經濟性變差[9]。
1.3 微濾機常見故障原因
微濾機的故障原因有很多方面,較為常見的有以下幾個方面。(1)微濾機清洗不當。微濾機使用過程中,需要經常進行清洗,如果清洗不當,易導致濾材受損或堵塞,進而影響過濾效果。(2)濾網孔堵塞。微濾機的濾網孔徑較小,易被雜質和微生物堵塞,導致濾網壓力過大,系統運行出現異常。(3)排污管堵塞。微濾機中的排污管也易被雜質和微生物堵塞,導致無法正常地排污。(4)電源異常。微濾機電源異常或電壓波動時,可能會導致微濾機出現故障。(5)管路連接不當。微濾機進水和出水口、管道連接不當,也易導致微濾機工作時出現異常或漏水等情況。(6)傳感器損壞。微濾機中的傳感器故障,如水位、壓力和溫度等傳感器故障,會導致微濾機無法正常工作。微濾機故障會導致水中的固體顆粒物增加,從而降低溶解氧的濃度,影響水產的正常生長,可能造成較大經濟損失,因此,有必要對微濾機的故障進行快速診斷、快速決策,以降低經濟損失。
2 微濾機故障診斷系統構建
微濾機的故障原因有很多,為建立一套全面可靠、能夠診斷多種故障的診斷系統,本研究設計了工廠化水產養殖微濾機故障診斷系統。該系統主要包括工作微濾機、備用微濾機、監測模塊、調度模塊和總控模塊,微濾機故障診斷系統結構如圖2所示。
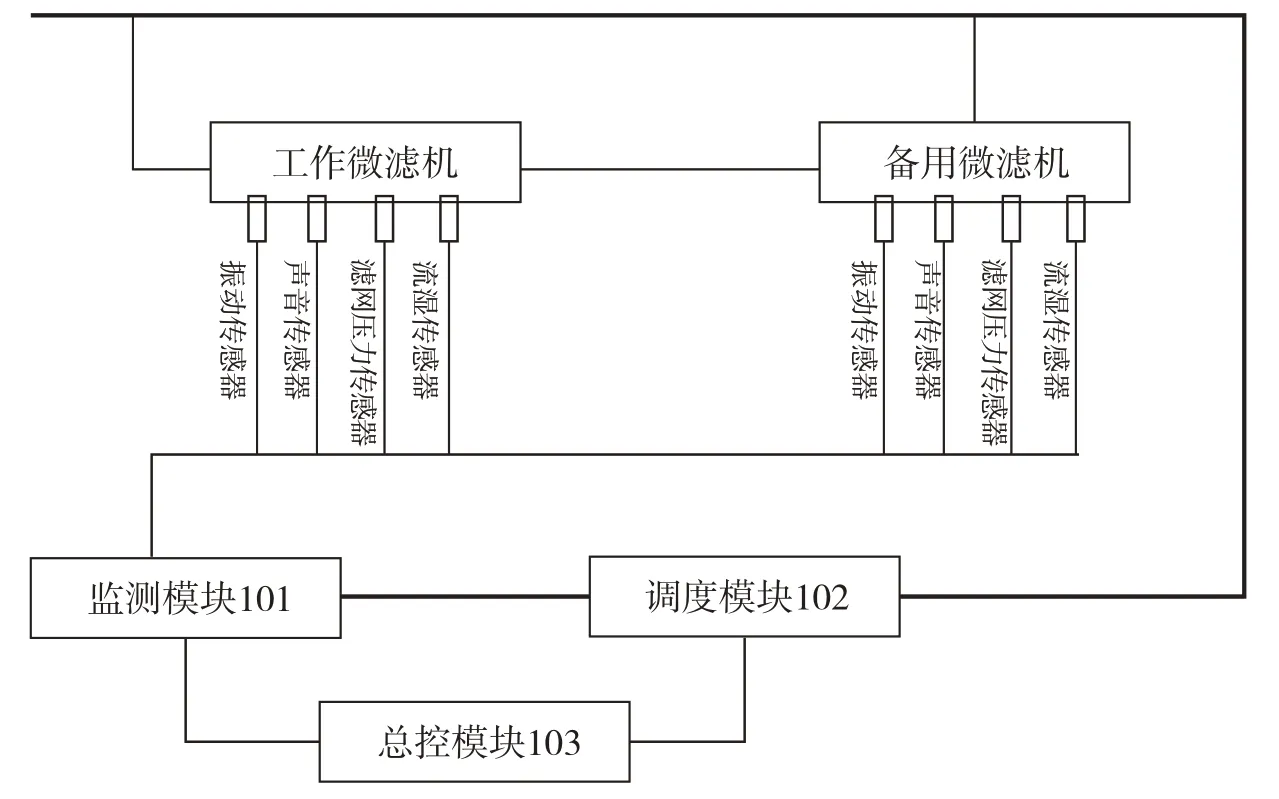
圖2 微濾機故障診斷系統結構
2.1 監測模塊
監測模塊包括第一計算機,多個參數傳感器,轉換接口及第一數據信號通路。參數傳感器安裝在工作微濾機的不同位置,用于采集工作微濾機不同部位的濾網壓力、振動、聲音和電壓等監測數據,監測數據通過數據信號通路傳送至轉換接口,轉換接口將監測數據格式轉換后發送至第一計算機,使用經驗熵決策樹算法對監測數據進行處理,得到分析結果進行保存或生成微濾機切換命令,將處理后獲得的異常結果傳送至調度模塊,并將全程狀態發送至總控模塊。
通過監測模塊下管理的各參數傳感器,實現對故障診斷所需數據的全面采集,便于進一步進行經驗熵決策樹過程分析,為整體系統的故障診斷過程建立基礎。
2.2 調度模塊
調度模塊包括命令接收發送器和接口控制器;命令接收發送器用于接收第一調度命令或第二調度命令,并將所執行的第一調度命令和第二調度命令進行反饋;接口控制器,與命令接收發送器連接。調度模塊主要用于實施第一調度命令或第二調度命令的命令,將工作微濾機切換至備用微濾機。
該系統通過調度模塊實現微濾機切換操作,當工作微濾機發生故障時,由調度模塊根據命令進行具體切換。該單元可以由單片機加控制器實現。
2.3 總控模塊
總控模塊包括第二計算機、接口選擇控制器及第二數據信號通路。第二計算機中安裝系統數據庫,系統數據庫對工廠化水產養殖微濾機故障診斷系統的運行狀態進行記錄;接口選擇控制器用于實現命令的轉換及切換微濾機;第二數據信號通路用于第二計算機和接口選擇控制器間的數據傳輸。總控模塊用于對監測模塊和調度模塊的運行狀態進行記錄,并向調度模塊發送第二調度命令。該系統通過總控模塊對系統整體過程進行記錄,并進行必要的人工干預。
3 經驗熵決策樹模型構建
該系統通過監測微濾機各傳感器參數的故障數據得到最終的經驗熵決策樹模型,并使用此模型進行故障的快速定位及原因分析。
3.1 經驗熵決策樹概述
決策樹是一種常用的分類和回歸算法,在眾多的機器學習算法中占有重要地位。決策樹就是將數據分為類別、回歸或其他分組的模式,其結構形象生動,有很好的可解釋性和易理解性,可以有效地對一組數據進行分類和預測。決策樹的主要構造包括根節點、中間節點和葉節點。其中,根節點是決策樹的起點,其代表了整個數據集合;中間節點代表分支,其將數據集合分成若干個子集合,并對應不同的屬性和屬性值;葉節點代表分類結果,每個葉節點對應一種類別或回歸值。
經驗熵決策樹主要功能是利用經驗熵決策樹算法對微濾機的各項參數進行分析和建模。經驗熵決策樹是一種基于信息熵的決策樹算法,通過計算每個特征值對應的信息增益來確定最優的分裂點,并遞歸構建決策樹。本研究將經驗熵決策樹算法應用于微濾機故障診斷中,利用微濾機運行過程中的各項參數來構建故障診斷模型。
3.2 經驗熵決策樹模型構建步驟
傳感器監測的各參數實時數據,通過數據通路傳輸給轉換器,監測模塊基于經驗熵決策樹獲得故障診斷的結果,通過使用轉換后的傳感器參數,進行故障的診斷與分析,如果結果正常,則保存;如果結果出現異常,則發送調度命令并保存。
構建經驗熵決策樹模型,確定計算決策樹時各內部結點的經驗權值,以及各決策因子項的經驗比重。經驗權值總和為1,不同情況下的經驗因子不同,如微濾機異響較大時,經驗因子可以設為聲音0.4,振動0.2,濾網壓力0.2,溫度0.1及電壓0.1,其總和為0.4+0.2+0.2+0.1+0.1=1,該因子是根據經驗所得,可以根據不同的故障類型選擇不同的數值,數值的不同會影響決策樹的收斂速度。
基于經驗熵的決策樹模型,通過搭建算法詳細模型,確定分層的深度和最終結構。通過已有的故障數據對經驗熵決策樹進行測試、訓練和驗證,使用計算機格式數據進行系統分析。基于經驗熵決策樹的模型構建過程及步驟如圖3所示。

圖3 經驗熵決策樹構建步驟
(1)根據已有的故障數據,建立數據集,并將數據集分為測試集、訓練集和驗證集。
(2)對故障數據集進行集中化預處理,剔除異常數據,供建立經驗熵決策樹模型使用。
(3)構建基于經驗熵的決策樹初步模型,并用測試集對模型進行初步測試,以驗證模型的合理性。
在構建決策樹的某結點時,要在該結點的傳統計算熵前乘一個經驗因子,以調整該結點的權重,由此進行故障的分類。傳統的決策樹模型的權重:決策樹結點權重=計算熵。基于經驗熵決策樹的權重:經驗熵決策樹結點權重=經驗因子×計算熵。將二者進行對比可以發現,基于經驗熵決策樹的模型節點權重構建更加合理,而決策樹結構的不同,會影響故障診斷的準確程度,基于經驗熵的決策樹準確度更高。
經驗因子需要不斷調整,以取得較優的決策樹結點,該因子主要有兩個方面的作用:加速決策樹的收斂,通常情況下,技術人員在積累了大量經驗的前提下,可以通過某一方面的原因迅速確定故障,該原因此時所占的決策比重大于其他原因的比重,而經驗因子所扮演的就是這個角色,可以調整權重來迅速讓決策樹收斂;提高特定情況下的準確率,同一組數據,不同的經驗因子,可以形成結構完全不同的決策樹,而不同結構的決策樹,其準確程度不同,在微濾機的特定情形下,經驗熵決策樹準確度要高于傳統的決策樹。
(4)通過已經構建的經驗熵決策樹模型,利用訓練集對模型進行訓練,并對模型進一步調整,通過不斷的調整經驗因子,得到最優的經驗熵決策樹模型。
(5)得到最終的經驗熵決策樹模型,并利用驗證集對模型進行綜合評價,驗證通過后將該模型投入運行。
基于經驗熵決策樹模型的創建,通過各傳感器監測的參數實時數據得到所需數據集,再將數據集分為測試集、訓練集和驗證集,分別對初始模型進行合理性測試、模型訓練及最優模型驗證;通過模型構建過程和步驟,并對經驗因子進行調整分析,根據不同的故障類型可以調整不同經驗因子的值,最終得到較優模型。
4 結語
綜上,本研究在現有微慮機及故障診斷系統基礎上,研究設計了工廠化水產養殖微濾機故障診斷系統,該系統包括監測模塊、調度模塊及總控模塊,實現了系統的完整控制,在對系統精準控制的同時,實現了故障診斷的自動化和智能化,可對故障進行快速定位及可能性原因的分析。該系統實現了微濾機故障診斷的自動化、智能化及故障的快速定位,保障了養殖水產的安全,降低了運行成本,提高了經濟效益。
猜你喜歡
黨課參考(2021年20期)2021-11-04 09:39:46
汽車維修與保養(2019年7期)2020-01-06 03:30:42
小哥白尼(軍事科學)(2019年6期)2019-03-14 05:49:56
黨課參考(2018年20期)2018-11-09 08:52:36
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
都市麗人(2015年4期)2015-03-20 13:33:22
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21