基于深度學(xué)習(xí)模型識(shí)別風(fēng)電場避讓物的方法研究
2024-02-10 09:59:14雷鳴
太陽能 2024年1期
雷 鳴
(1. 中國電建集團(tuán)西北勘測設(shè)計(jì)研究院有限公司,西安 710065;2. 中鐵第一勘察設(shè)計(jì)院集團(tuán)有限公司,西安 710065)
0 引言
2020 年9 月,中國明確提出了2030 年碳達(dá)峰與2060 年碳中和的目標(biāo)[1]。根據(jù)云南省綠色能源行業(yè)協(xié)會(huì)發(fā)布的統(tǒng)計(jì)數(shù)據(jù),截至2022 年9 月底,中國風(fēng)電新增裝機(jī)容量為1924 萬kW,其中,西北、華北和東北地區(qū)(下文簡稱為“三北”地區(qū))的風(fēng)電新增裝機(jī)容量占比約為74.3%。“三北”地區(qū)的風(fēng)電場以風(fēng)電基地項(xiàng)目居多,而目前新建風(fēng)電場不僅需要避讓生態(tài)保護(hù)紅線、永久基本農(nóng)田、自然保護(hù)區(qū)、風(fēng)景名勝區(qū)等國家限建區(qū)域,以及需要考慮風(fēng)電場內(nèi)風(fēng)電機(jī)組之間的尾流影響,還需要重點(diǎn)關(guān)注周邊已建風(fēng)電場對(duì)新建風(fēng)電場的尾流影響。工程中針對(duì)尾流影響的計(jì)算,通常采用當(dāng)?shù)剡b感影像對(duì)周邊已建風(fēng)電場的風(fēng)電機(jī)組機(jī)位進(jìn)行人工標(biāo)記,然后將標(biāo)記后的風(fēng)電機(jī)組機(jī)位與擬建風(fēng)電場的風(fēng)電機(jī)組機(jī)位共同建模,進(jìn)行尾流計(jì)算。但該方法的工作效率低,過失誤差較大。
根據(jù)國家發(fā)展和改革委員會(huì)能源研究所的統(tǒng)計(jì),截至2021 年年底,中國現(xiàn)有在役風(fēng)電機(jī)組超過14 萬臺(tái),其中,0.85~1.5 MW 的風(fēng)電機(jī)組超過5萬臺(tái)。據(jù)其測算,在2021—2030 年期間,中國風(fēng)電機(jī)組累計(jì)改造退役容量將超過6000 萬kW。由此可見,未來需要進(jìn)行技改的老舊風(fēng)電場規(guī)模十分可觀。
早期建設(shè)的風(fēng)電場大部分位于平原地區(qū),需要進(jìn)行技改的老舊風(fēng)電場通常已運(yùn)營多年,且其周邊也已建有大量風(fēng)電場。老舊風(fēng)電場在進(jìn)行技改時(shí)需要對(duì)風(fēng)電機(jī)組機(jī)位進(jìn)行重新布置,除考慮要利用既有集電線路、既有道路等已建設(shè)施之外,其他風(fēng)電場對(duì)本風(fēng)電場的尾流影響也不可忽視。但由于老舊風(fēng)電場附近環(huán)境復(fù)雜、已建風(fēng)電機(jī)組數(shù)量多,采用人工標(biāo)記已建風(fēng)電機(jī)組機(jī)位的方式容易出現(xiàn)缺漏。
針對(duì)新建風(fēng)電場和老舊風(fēng)電場技改中風(fēng)電機(jī)組機(jī)位的布置,本文提出一種基于深度學(xué)習(xí)模型識(shí)別風(fēng)電場避讓物的方法,利用深度學(xué)習(xí)模型對(duì)遙感影像中已建風(fēng)電場風(fēng)電機(jī)組和民房等敏感因素進(jìn)行識(shí)別標(biāo)記,采用OpenWind 軟件對(duì)這些敏感因素進(jìn)行避讓,并快速進(jìn)行風(fēng)電機(jī)組布置。
1 風(fēng)電機(jī)組機(jī)位選址
風(fēng)電機(jī)組機(jī)位的布置需要考慮以下幾點(diǎn):
1)需要考慮該位置的風(fēng)能資源稟賦性。測風(fēng)塔實(shí)測數(shù)據(jù)只能代表該位置的風(fēng)能條件,需要利用Meteodyn WT、WindSim、OpenWind、WAsP等風(fēng)電場風(fēng)資源仿真軟件對(duì)場區(qū)內(nèi)各位置的風(fēng)能資源進(jìn)行推算。
2)風(fēng)電機(jī)組機(jī)位選擇時(shí)需要避開國家公園、森林公園、壓覆礦區(qū)域、自然保護(hù)區(qū)、永久基本農(nóng)田、生態(tài)保護(hù)紅線、飲用水源保護(hù)區(qū)、風(fēng)景名勝區(qū)等限制建設(shè)區(qū)域。
3)合適的避讓距離。由于風(fēng)輪轉(zhuǎn)動(dòng)時(shí)將產(chǎn)生噪聲,風(fēng)電機(jī)組布置時(shí)應(yīng)保證與附近民房相隔一定的距離,使風(fēng)電機(jī)組運(yùn)行時(shí)的噪音經(jīng)過距離衰減后符合GB 3096—2008《聲環(huán)境質(zhì)量標(biāo)準(zhǔn)》的要求,但各省市針對(duì)避讓距離的要求并不統(tǒng)一,大多數(shù)在300~500 m 之間。
4)無論是中國早年開發(fā)的風(fēng)電場,還是目前新建的風(fēng)電基地項(xiàng)目,大多數(shù)都建于平原地區(qū);同時(shí),這些風(fēng)電場周邊也已建有其他風(fēng)電場。因此需要考慮周邊風(fēng)電場對(duì)本項(xiàng)目的尾流影響。
目前,獲取周邊風(fēng)電場的風(fēng)電機(jī)組機(jī)位點(diǎn)坐標(biāo)的方法有以下4 種:
1)實(shí)地走訪。通過現(xiàn)場踏勘的方式,利用實(shí)時(shí)動(dòng)態(tài)(RTK)載波相位差分技術(shù)測量儀等工具逐個(gè)采集周邊風(fēng)電場的風(fēng)電機(jī)組機(jī)位點(diǎn)坐標(biāo)。該方法的優(yōu)點(diǎn)是獲取的機(jī)位點(diǎn)坐標(biāo)準(zhǔn)確、精度高;但缺點(diǎn)是耗時(shí)、耗力,并且容易產(chǎn)生遺漏。
2)資料收集。向當(dāng)?shù)卣蛑苓咃L(fēng)電場業(yè)主收集各場區(qū)內(nèi)的風(fēng)電機(jī)組機(jī)位點(diǎn)坐標(biāo)。該方法的優(yōu)點(diǎn)是獲得的機(jī)位點(diǎn)坐標(biāo)準(zhǔn)確,不易遺漏;但缺點(diǎn)是由于溝通對(duì)象較多,協(xié)調(diào)工作量大,配合困難,工作進(jìn)度不可控。
3)利用遙感影像人工識(shí)別。工程師采用當(dāng)?shù)剡b感影像對(duì)周邊已建的風(fēng)電機(jī)組和民房進(jìn)行逐個(gè)標(biāo)記。該方法的優(yōu)點(diǎn)是工作進(jìn)度可控,協(xié)調(diào)工作量小,易于實(shí)施;但缺點(diǎn)是所獲得的數(shù)據(jù)質(zhì)量完全取決于工程師的細(xì)心程度,容易造成風(fēng)電機(jī)組機(jī)位統(tǒng)計(jì)的缺漏,過失誤差較大。
4)基于深度學(xué)習(xí)模型識(shí)別風(fēng)電場避讓物。為降低過失誤差,提高遙感影像的識(shí)別效率及精度,本文提出基于深度學(xué)習(xí)模型識(shí)別風(fēng)電場避讓物的新方法,利用訓(xùn)練后的深度學(xué)習(xí)模型對(duì)遙感影像中的風(fēng)電機(jī)組和民房進(jìn)行識(shí)別標(biāo)記,并繪制場區(qū)民房分布圖及風(fēng)電機(jī)組機(jī)位分布圖,獲取風(fēng)電機(jī)組機(jī)位點(diǎn)坐標(biāo)。該方法利用計(jì)算機(jī)分析并標(biāo)記避讓物可有效消除過失誤差,同時(shí)借助計(jì)算機(jī)運(yùn)算可極大提高識(shí)別風(fēng)電場避讓物的工作效率和結(jié)果精度。同時(shí),工程師可利用識(shí)別結(jié)果與遙感影像進(jìn)行快速比對(duì),判斷模型質(zhì)量并對(duì)結(jié)果進(jìn)行校核。
2 深度學(xué)習(xí)模型
深度學(xué)習(xí)模型是基于人工神經(jīng)網(wǎng)絡(luò)算法衍生出的一種模型,該模型通過建設(shè)多層運(yùn)算層次結(jié)構(gòu)[2],利用給定的輸入層和輸出層,通過網(wǎng)絡(luò)的學(xué)習(xí)和調(diào)整參數(shù)權(quán)重,建立起輸入層和輸出層的函數(shù)關(guān)系,并逐步修正其誤差[3]。深度學(xué)習(xí)模型可以根據(jù)不同的數(shù)據(jù)集進(jìn)行自我調(diào)整,以適應(yīng)不同的應(yīng)用場景。
該模型旨在建立輸入層與輸出層的函數(shù)關(guān)系。通過訓(xùn)練樣本對(duì)模型進(jìn)行學(xué)習(xí)與修正,然后利用修正后的模型對(duì)遙感影像進(jìn)行避讓物識(shí)別與標(biāo)記。首先利用模型中的卷積神經(jīng)網(wǎng)絡(luò)(CNN)算法提取遙感影像中的信息;然后逐層建立神經(jīng)元,在神經(jīng)元網(wǎng)絡(luò)中,除頂層外其他所有層的權(quán)重均設(shè)置為雙向,正向傳播時(shí)的權(quán)重用于“認(rèn)知”,反向傳播時(shí)的權(quán)重用于“生成”;最后采用CNN算法進(jìn)行“正向傳播-反向傳播”循環(huán)迭代,調(diào)整除頂層外其他所有層的權(quán)重,使輸入層和輸出層的結(jié)果達(dá)成一致。
深度學(xué)習(xí)模型的工作流程圖如圖1 所示。
3 基于深度學(xué)習(xí)模型識(shí)別風(fēng)電場避讓物方法的具體措施
3.1 避讓物識(shí)別
本文提出的基于深度學(xué)習(xí)模型識(shí)別風(fēng)電場避讓物的方法中,避讓物識(shí)別的具體步驟包括訓(xùn)練區(qū)避讓物標(biāo)記、訓(xùn)練區(qū)避讓物特征值導(dǎo)出、模型訓(xùn)練、避讓物提取 。
1)訓(xùn)練區(qū)避讓物標(biāo)記。截取遙感影像中的部分區(qū)域作為模型的訓(xùn)練區(qū)域,利用特征提取骨干網(wǎng)絡(luò)(convolution network)得到訓(xùn)練區(qū)域的特征圖。在訓(xùn)練區(qū)域內(nèi)對(duì)風(fēng)電機(jī)組、民房等需要避讓的物體進(jìn)行人工標(biāo)記。
2)訓(xùn)練區(qū)避讓物特征值導(dǎo)出。在對(duì)應(yīng)的坐標(biāo)系內(nèi),通過指定的切片尺寸對(duì)所有標(biāo)記出的避讓物進(jìn)行切片并提取其特征。
3)模型訓(xùn)練。將樣本數(shù)據(jù)輸入至模型,利用Mask R-CNN 算法使輸入層與輸出層的結(jié)果達(dá)到一致。Mask R-CNN 算法采用ResNet 殘差網(wǎng)絡(luò)算法完成多層預(yù)測與賦權(quán)重,可使預(yù)測結(jié)果的準(zhǔn)確度不隨卷積層層數(shù)的增加而下降[4]。模型采用雙線性差值(RPN)算法,對(duì)訓(xùn)練區(qū)域生成的特征圖的規(guī)律生成一系列的錨框,并判斷錨框中是否存在待識(shí)別物體。通過深度學(xué)習(xí)模型不斷的“正向傳播-反向傳播”循環(huán)迭代,調(diào)整模型中除頂層外其他所有層的權(quán)重,使對(duì)錨框中避讓物的識(shí)別更加準(zhǔn)確[5]。
4)避讓物提取。導(dǎo)入需要標(biāo)記避讓物的遙感影像,然后利用訓(xùn)練后的深度學(xué)習(xí)模型對(duì)遙感影像中的避讓物進(jìn)行自動(dòng)識(shí)別、標(biāo)記、導(dǎo)出。
3.2 遙感影像區(qū)域的風(fēng)能資源評(píng)估
將處理后的實(shí)測地形圖,當(dāng)?shù)氐臍W空局全球陸地覆蓋數(shù)據(jù)(ESA)、美國國家土地覆蓋數(shù)據(jù)庫(NLCD)等粗糙度圖譜,以及測風(fēng)塔測風(fēng)數(shù)據(jù)作為輸入文件,導(dǎo)入由法國美迪公司開發(fā)的Meteodyn WT 或挪威WindSim 公司開發(fā)的WindSim 等流體力學(xué)計(jì)算(CFD)軟件中,通過求解Navier-Stokes方程,仿真遙感影像區(qū)域的風(fēng)流運(yùn)動(dòng),求得該區(qū)域風(fēng)能資源分布圖譜。
3.3 風(fēng)電機(jī)組機(jī)位布置
OpenWind 軟件可利用地理信息和風(fēng)能資源模型對(duì)風(fēng)電機(jī)組機(jī)位進(jìn)行自動(dòng)尋優(yōu)排布[6]。
1)在OpenWind 軟件中導(dǎo)入由深度學(xué)習(xí)模型提取的周邊風(fēng)電場中已建風(fēng)電機(jī)組的機(jī)位點(diǎn)坐標(biāo),用于測算風(fēng)電場之間的尾流影響。
2)輸入由深度學(xué)習(xí)模型繪制的場區(qū)民房分布圖及當(dāng)?shù)氐南拗平ㄔO(shè)區(qū)域分布圖。風(fēng)電機(jī)組布置時(shí)還需要再考慮與周邊民房之間的距離,避讓距離為300~500 m。
3)在OpenWind 軟件中導(dǎo)入前面得到的遙感影像區(qū)域風(fēng)能資源分布圖譜,利用該軟件的自動(dòng)尋優(yōu)功能,對(duì)風(fēng)電機(jī)組機(jī)位進(jìn)行尋優(yōu)排布。
4 案例分析
以寧夏回族自治區(qū)某風(fēng)電場為例,采用本文提出的基于深度學(xué)習(xí)模型識(shí)別風(fēng)電場避讓物的方法進(jìn)行老舊風(fēng)電場技改的風(fēng)電機(jī)組機(jī)位選址分析。該風(fēng)電場于2007 年3 月投產(chǎn),屬于平原風(fēng)電場,共安裝了66 臺(tái)由金風(fēng)科技股份有限公司生產(chǎn)的750 kW 風(fēng)電機(jī)組,總裝機(jī)容量為49.5 MW。該風(fēng)電場場址范圍內(nèi)設(shè)立了1 座測風(fēng)塔,編號(hào)為0001#。
該風(fēng)電場屬于寧夏回族自治區(qū)最早開發(fā)建設(shè)的風(fēng)電場之一,項(xiàng)目所在區(qū)域的風(fēng)能資源已被充分開發(fā)利用,其周邊建有多個(gè)風(fēng)電場。該風(fēng)電場已運(yùn)行16 年,根據(jù)國家能源局2023 年發(fā)布的《風(fēng)電場改造升級(jí)和退役管理辦法》,該風(fēng)電場具備改造升級(jí)條件,計(jì)劃對(duì)其風(fēng)電機(jī)組機(jī)位進(jìn)行重新規(guī)劃布置。
該風(fēng)電場內(nèi)測風(fēng)塔的基本信息如表1 所示,其地理位置示意圖如圖2 所示。

表1 測風(fēng)塔的基本信息Table 1 Basic information of anemometer tower
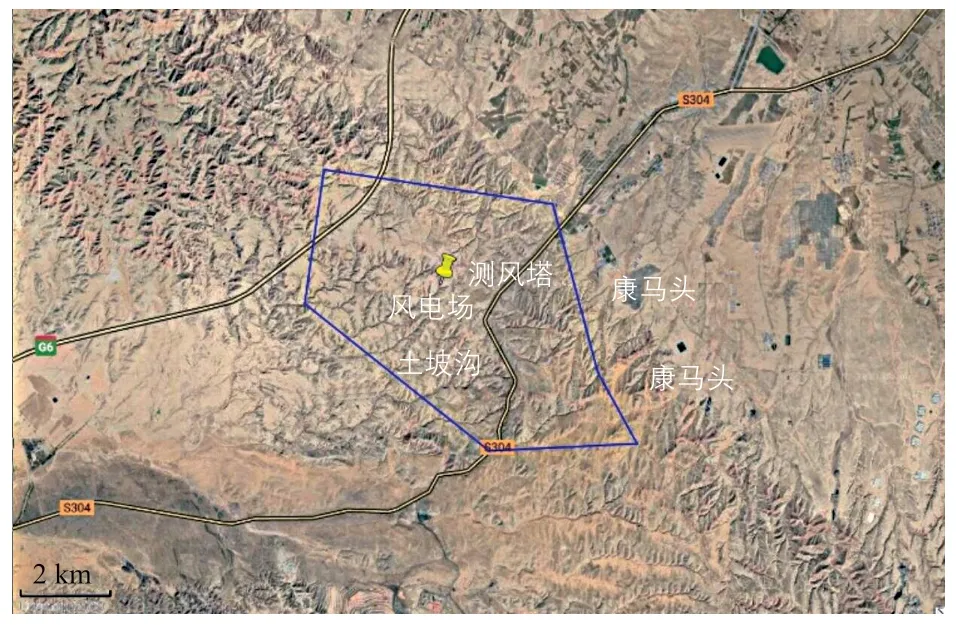
圖2 測風(fēng)塔的地理位置示意圖Fig. 2 Geographical location diagram of anemometer tower
測風(fēng)塔有效數(shù)據(jù)的完整率大于90%;再加上該風(fēng)電場的地形為平坦地形,測風(fēng)塔所在位置的海拔高度與場區(qū)平均海拔高度接近,因此該測風(fēng)塔處的風(fēng)能資源數(shù)據(jù)具有較好的代表性。該測風(fēng)塔115 m 高度處:代表年平均風(fēng)速為5.82 m/s,平均風(fēng)功率密度為180 W/m2;風(fēng)向主要集中在正南,占全部風(fēng)向分布的24.68%;風(fēng)能也主要集中在正南,占全部風(fēng)能分布的28.35%;平均空氣密度為1.032 kg/m3;綜合切變指數(shù)為0.109;15 m/s 風(fēng)速段的湍流強(qiáng)度為0.116。該風(fēng)電場場區(qū)的風(fēng)能資源分布圖如圖3 所示。
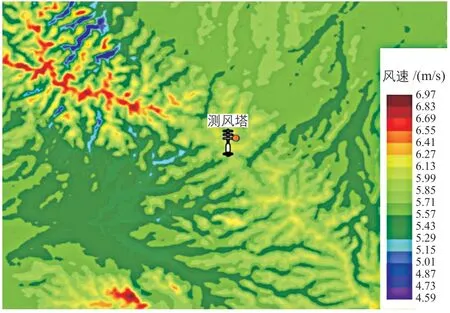
圖3 該風(fēng)電場場區(qū)的風(fēng)能資源分布圖Fig. 3 Wind energy resource distribution map in the wind farm area
根據(jù)項(xiàng)目區(qū)域特點(diǎn),本次深度學(xué)習(xí)模型“前后循環(huán)迭代次數(shù)”設(shè)置為“20 回”,“驗(yàn)證百分比”設(shè)為“10%”,“切片尺寸”設(shè)置為“1000 pix”,“步幅”設(shè)置為“256 pix”,“旋轉(zhuǎn)角度”設(shè)置為“0”。
通過深度學(xué)習(xí)模型識(shí)別出遙感影像區(qū)域內(nèi)已建風(fēng)電機(jī)組共有436 臺(tái),其中包括該項(xiàng)目的66 臺(tái)原有風(fēng)電機(jī)組。為了展示識(shí)別標(biāo)記的效果,局部遙感影像區(qū)域內(nèi)已建風(fēng)電機(jī)組的分布圖如圖4 所示。圖中:紅框內(nèi)容為識(shí)別的紅色標(biāo)記的放大圖。
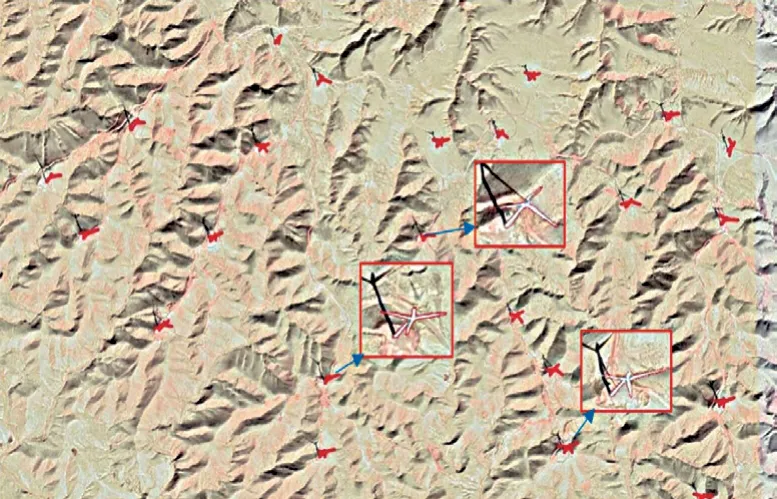
圖4 局部遙感影像區(qū)域內(nèi)已建風(fēng)電機(jī)組分布圖Fig. 4 Distribution map of existing wind turbines in the local remote sensing image area
利用OpenWind 軟件進(jìn)行風(fēng)電機(jī)組尋優(yōu)排布后,該風(fēng)電場改造為采用10 臺(tái)5 MW 風(fēng)電機(jī)組,改造后風(fēng)電場的年上網(wǎng)電量預(yù)計(jì)為13246 萬kWh,年等效滿負(fù)荷小時(shí)數(shù)預(yù)計(jì)為2676 h。改造方案的推薦風(fēng)電機(jī)組機(jī)位點(diǎn)與周圍已建風(fēng)電機(jī)組機(jī)位點(diǎn)的相對(duì)位置如圖5 所示。圖中:藍(lán)色點(diǎn)為推薦風(fēng)電機(jī)組機(jī)位點(diǎn);紅色點(diǎn)為周圍已建風(fēng)電機(jī)組機(jī)位點(diǎn)。

圖5 改造方案的推薦風(fēng)電機(jī)組機(jī)位點(diǎn)與周圍已建風(fēng)電機(jī)組機(jī)位點(diǎn)的相對(duì)位置圖Fig. 5 Relative position map of recommended wind turbine location points for renovation plan and surrounding existing wind turbine location points
5 結(jié)論
本文提出一種基于深度學(xué)習(xí)模型識(shí)別風(fēng)電場避讓物的方法,利用深度學(xué)習(xí)模型對(duì)遙感影像中的已建風(fēng)電場風(fēng)電機(jī)組和民房等敏感因素進(jìn)行識(shí)別標(biāo)記,采用OpenWind 軟件對(duì)這些敏感因素進(jìn)行避讓,并實(shí)現(xiàn)風(fēng)電機(jī)組快速布置,得出以下結(jié)論:
1)利用深度學(xué)習(xí)模型繪制場區(qū)民房分布圖及風(fēng)電機(jī)組機(jī)位分布圖,獲取風(fēng)電機(jī)組機(jī)位點(diǎn)坐標(biāo),結(jié)果準(zhǔn)確、不易產(chǎn)生遺漏、能夠有效消除過失誤差。同時(shí),工程師可利用該民房分布圖和機(jī)位分布圖與遙感影像進(jìn)行快速比對(duì),判斷模型質(zhì)量并對(duì)模型生成的成果進(jìn)行校核。
2)深度學(xué)習(xí)模型可以根據(jù)不同的數(shù)據(jù)集進(jìn)行自我調(diào)整,從而適應(yīng)不同的應(yīng)用場景,因此可以利用深度學(xué)習(xí)模型對(duì)民房、廠房、牛棚、110/220kV 鐵塔、溝渠、河道、道路、光伏電站等風(fēng)電場避讓物進(jìn)行標(biāo)記。
3)利用深度學(xué)習(xí)模型進(jìn)行避讓物標(biāo)記的方法大幅降低了人工標(biāo)記避讓物時(shí)的工作量,有效減少了大量的繁雜、低效、高重復(fù)性的工作,提高了工作效率。
需要說明的是,深度學(xué)習(xí)模型是通過對(duì)比訓(xùn)練區(qū)域特征圖與標(biāo)記處的特征值,不斷修正模型中除頂層外其他所有層的權(quán)重,從而提高識(shí)別精度的方法。因此,在訓(xùn)練區(qū)避讓物標(biāo)記這一步驟中,人工標(biāo)記避讓物時(shí)不能漏標(biāo)避讓物,否則會(huì)引入極大的誤差,從而嚴(yán)重降低訓(xùn)練模型的精度。
本方法對(duì)遙感影像的分辨率和計(jì)算機(jī)配置的要求較高。隨著遙感影像分辨率的增加,深度學(xué)習(xí)模型的識(shí)別精度會(huì)顯著提高。深度學(xué)習(xí)模型擅長圖像處理、文本分析領(lǐng)域,通常來講,使用圖形處理器(GPU)訓(xùn)練模型的效率更高。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年11期)2020-12-14 06:59:52
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
藝術(shù)品鑒證.中國藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國藝術(shù)金融(2018年10期)2019-01-08 02:44:26
藝術(shù)品鑒證.中國藝術(shù)金融(2018年6期)2019-01-08 02:43:04
藝術(shù)品鑒證.中國藝術(shù)金融(2018年12期)2018-08-26 06:03:48
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
