基于LSTM的小洋山北作業區投產初期洋山深水港主航道交通流量預測與分析
2024-02-19 18:02:57劉劍平?杜佳欣?羅子云?尚麟
航海 2024年1期
劉劍平?杜佳欣?羅子云?尚麟

摘 要:自2005年建港以來,洋山深水港已迅速成為中國最關鍵的國際集裝箱樞紐港。小洋山北作業區建設規劃將會在小洋山島東側設立新的航道,增加錨地,因而需要提前對結合小洋山北作業區因素的洋山港主航道交通流量進行預測與分析。本文采用LSTM神經網絡模型,對規劃航道交通流量進行預測,以預判規劃投產后主航道交通流總體水平。研究結果顯示,規劃投產初期平均交通流量約為43艘/天,交通流量水平在41~46艘/天之間波動。這一結果對海事管理部門有重要意義,有助于制定有效的航道管理和資源分配策略,為保障洋山深水港高質量發展提供良好的水上交通環境。
關鍵詞:LSTM模型;交通流量預測;洋山深水港;小洋山北作業區
0 引 言
上海港位于長江下游入海口,東海之濱,被譽為全球最繁忙的港口之一[1]。上海港自然條件復雜,船舶種類多樣,船舶流量龐大,是國際貿易的重要紐帶。在2001年上海市城市總體規劃中,明確了建設上海國際航運中心的發展目標[2]。2010年,上海港集裝箱吞吐量首次超越新加坡港成為了世界第一之后持續保持領先地位[3]。洋山深水港作為中國首個在海島建設的港口[4],位于杭州灣口,自2005年開港以來,其集裝箱吞吐量逐年增長,在上海港連續13年集裝箱吞吐量排名第一中發揮著重要作用[5]。
2016年12月,上海市人民政府與浙江省人民政府簽署了《關于共同推進小洋山區域開發等重大合作事項的框架協議》,旨在共同推進小洋山進一步綜合開發。根據小洋山北作業區總體規劃,將在小洋山島東側,洋山警戒區北側位置新設航道和錨地。為提前掌握規劃投產后主航道交通流水平,制定符合實際的交通組織方案,需要結合規劃航道對主航道交通流量進行預測。
LSTM神經網絡以其能夠處理長期依賴性、防止梯度問題、靈活性和廣泛的應用領域等優點,成為深度學習領域的重要模型之一,特別適用于時間序列和序列數據建模任務,在時間序列預測方面具有廣泛應用。童建[6]等人構建LSTM神經網絡模型對浙江奉化衡山水庫的日來水量進行預測,并分析了不同的輸入變量組合情況下預測結果的精度。丁騰騰[7]利用LSTM模型,預測船閘位移,為船閘的安全預警提供參考。張瀟瀟[8]等人基于滬渝高速公路歷史數據,建立LSTM模型,對短時交通流進行預測,結果表明該模型對高速公路短時交通流具有良好的適用性。趙洪緒[9]等人對注水井分層注水量數據構建LSTM模型,預測產液量和含水量,為分層注水的優化奠定基礎。
LSTM神經網絡模型能夠捕捉復雜的時空依賴關系,有效解決長期依賴性問題,能夠更加準確地預測船舶流量,為有關部門制定有效的監管措施提供基礎。因此,本文利用LSTM神經網絡模型,對小洋山北作業區投產初期進出港船舶交通流量進行預測,為船舶交通安全組織管理提供參考。
1 研究區域概況與數據來源
1.1 研究區域
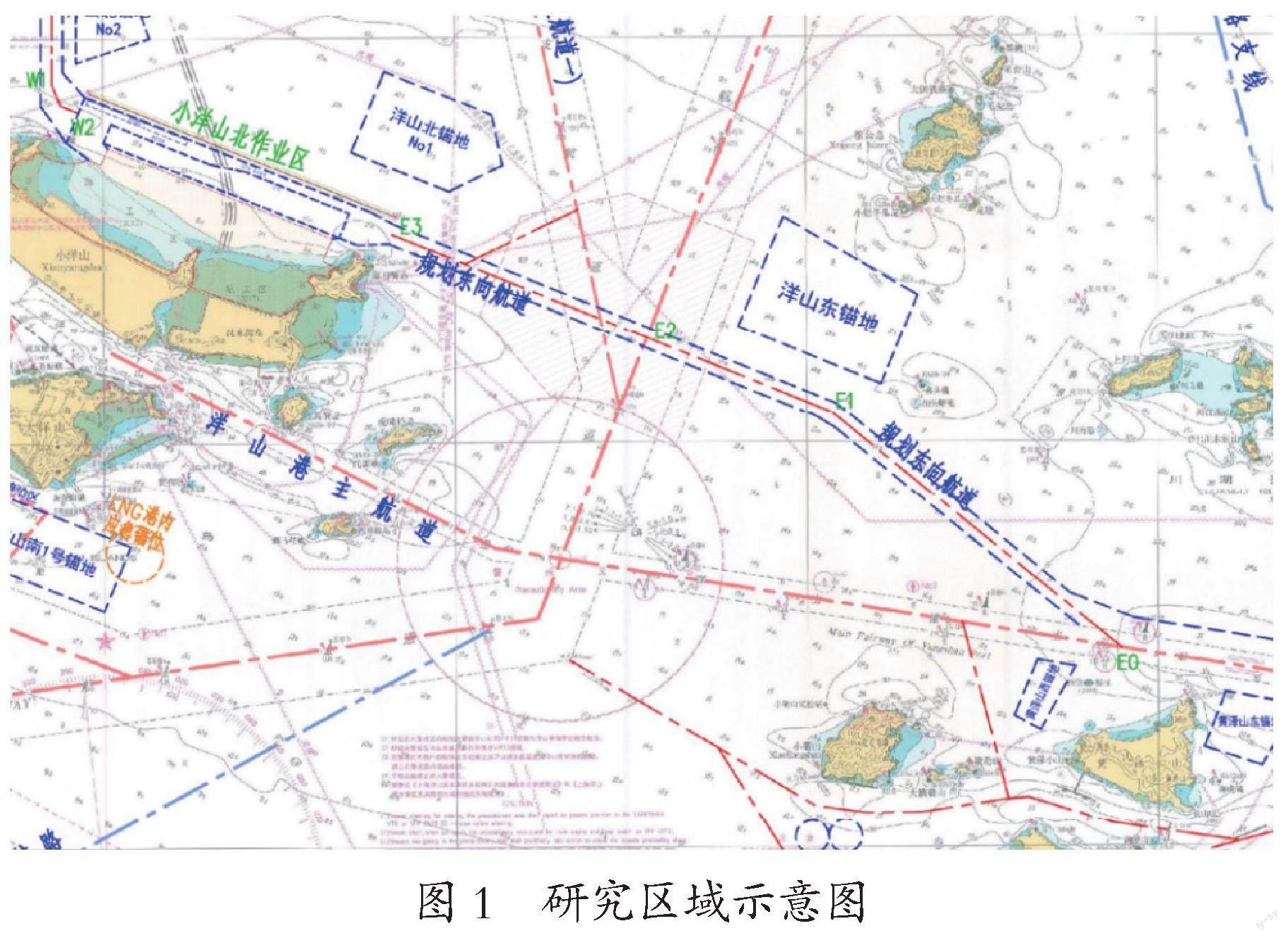
本文的研究區域為包含小洋山北作業區規劃航道在內的洋山港主航道,如圖1所示,在原主航道的基礎上,小洋山北作業區規劃東向航道、西向支航道和港內航道。東向航道(進出港主航道)總里程約19.3 km,航道寬度450 m,滿足7萬噸級集裝箱船雙向乘潮通航;西向支航道(分流部分進長江小型船舶)航程約為12.2 km,航道寬度320 m,最小水深8 m,利用自然水深主要通航5 000噸級及以下船舶;港內航道東段寬度435 m,設計底高程近期-13.7 m,遠期-15.5 m,滿足7萬噸級集裝箱船雙向全潮通航要求;港內航道西段寬度210 m,設計底高程-11.80 m,滿足2萬噸級集裝箱雙向全潮通航要求。
1.2 數據來源
基于規劃航道的地理位置、氣象水文條件,以及專家的經驗知識,本文將主航道的交通流量預測分為兩部分。第一部分為現有碼頭條件下對于主航道內船舶交通流以天為單位進行預測,第二部分則參考盛東國際集裝箱碼頭開港初期的單日平均船舶流量作為修正值,在第一部分預測的基礎上進行適當修正作為規劃投產初期洋山港進出港船舶流量的預測值。
經分析發現,2023年疫情管控放開以來,船舶交通流的變化與疫情前相差不大,因此本文收集了2020年5月31日至2023年5月31日的數據,由于部分數據缺失,共采集1 092天的交通流量數據。
2 時序特征與聚類
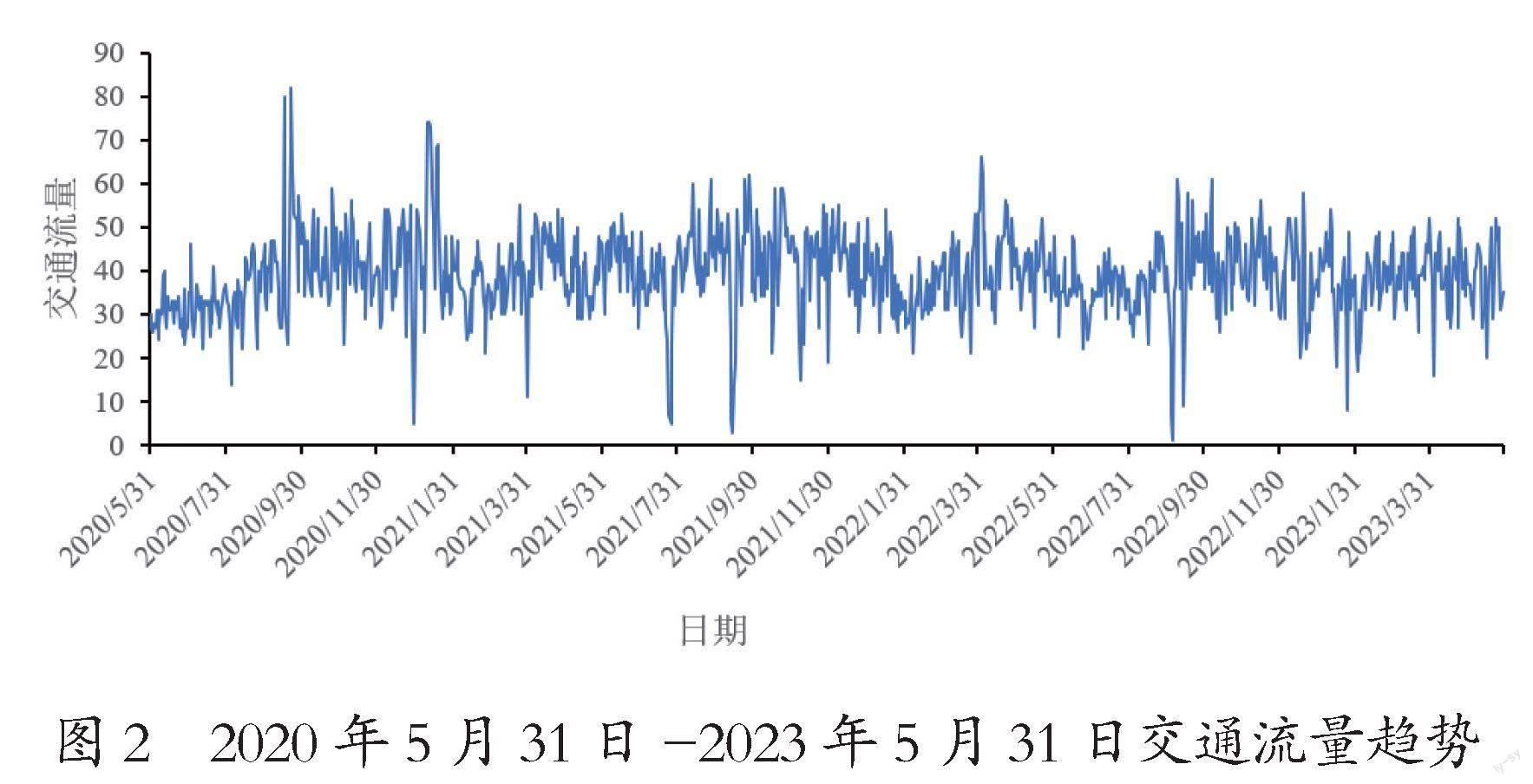
如圖2所示,2020年5月31日至2023年5月31日船舶交通流隨時間的變化情況。從圖中可以看出,船舶交通流呈現出一定的周期性變化。船舶交通流在每年的波動范圍較為類似,主要分布在28~51艘/天,峰值達到了82艘/天,日交通流量超過51艘每天的時段有86天,約占7.8%,交通流量波動的周期性受到多種因素的影響。其中,季節性因素可能是造成周期性波動的重要原因,例如每年的節假日、天氣季節變化、海上貿易旺季等。此外,經濟活動的周期性變化也可能在一定程度上影響船舶交通流量的波動。除了周期性特征,還可以注意到在圖中有一些局部的峰值和谷值。這些波動可能是由于特定事件或因素引起的,比如大型活動、交通管制、港口運營調整等。
本文利用k-means聚類方法對2020年5月31日-2023年5月31日船舶交通流量進行聚類,k-means聚類方法的執行過程如下:
1)初始化:隨機選擇K個數據點,將其充當初始聚類中心,這些聚類中心代表各個簇的中心點。
2)分配數據點:計算每個數據點與K個聚類中心的距離,并將數據點分配至最近的聚類中心所對應的簇中。
3)更新聚類中心:計算每個簇所有數據點的平均值,將該平均值作為新的聚類中心。
4)重復步驟2和步驟3:重復進行數據點的分配和聚類中心的更新,直到簇的中心點不再發生顯著變化。
5)完成聚類:當停止條件滿足時,k-means算法結束,得到K個簇,并將數據點劃分到這些簇中。
利用k-means聚類得到的結果見表1。
根據聚類結果顯示,船舶交通流主要集中在每天約39、51、28艘左右。在涵蓋2020年5月31日至2023年5月31日的時間段內,交通流量約為39艘/天的占比最大,共計566天,約占51.86%;交通流量約為51艘/天的時段有261天,占比23.90%;而交通流量約為28艘/天的時段有265天,占比24.27%。
3 神經網絡預測模型構建
3.1 LSTM神經網絡模型
神經網絡預測模型是機器學習中的一種強大工具[10],它的設計靈感源自人腦神經系統的運作原理。這個模型具備對輸入數據進行預測和分類的能力,其核心原理包含了神經元、權重、層級結構、前向傳播和反向傳播等重要概念。
神經網絡模型的基本構建單元是神經元,它扮演著模型的基石角色[11]。神經元接收輸入數據,通過與之相關聯的權重進行加權求和。這些權重可以被看作是模型學習到的參數,它們決定了每個輸入在模型中的重要性。加權求和的結果隨后經過一個激活函數的非線性轉換,將其映射為神經元的輸出。激活函數的作用在于引入非線性因素,從而使得神經網絡能夠更好地處理復雜的數據模式。
神經網絡由多個層級組成,典型地包括輸入層、隱藏層和輸出層。輸入層接收原始數據,而隱藏層和輸出層用于進行信息處理和預測。隱藏層通常包含多個神經元[12],而且可以有多個隱藏層,這樣的結構提高了模型對輸入數據的抽象和表示能力,使其能夠更好地發現復雜的模式和關聯。
在進行預測時,輸入數據通過前向傳播的方式在神經網絡中傳遞。數據從輸入層開始,逐層經過每個神經元的加權求和和激活函數處理,一直傳遞至輸出層。每個神經元接收來自前一層神經元的輸出,將其加權求和,并經過激活函數的處理傳遞給下一層的神經元。這個過程一直持續到達輸出層,輸出層的神經元生成最終的預測結果。
在訓練神經網絡模型時,需要確定最優的權重參數,以使模型的預測結果與真實值盡可能接近。這個過程被稱為反向傳播,它使用損失函數來度量預測結果與真實值之間的差異,并根據這個差異來更新權重參數。通過反復迭代前向傳播和反向傳播的過程,神經網絡模型逐漸調整權重參數,提高預測的準確性。神經網絡預測模型之所以強大,在于它具備非線性建模能力,能夠捕捉復雜數據模式[13]。通過調整神經網絡的結構、神經元數量和權重參數,可以構建出適應各種復雜任務和數據的預測模型。
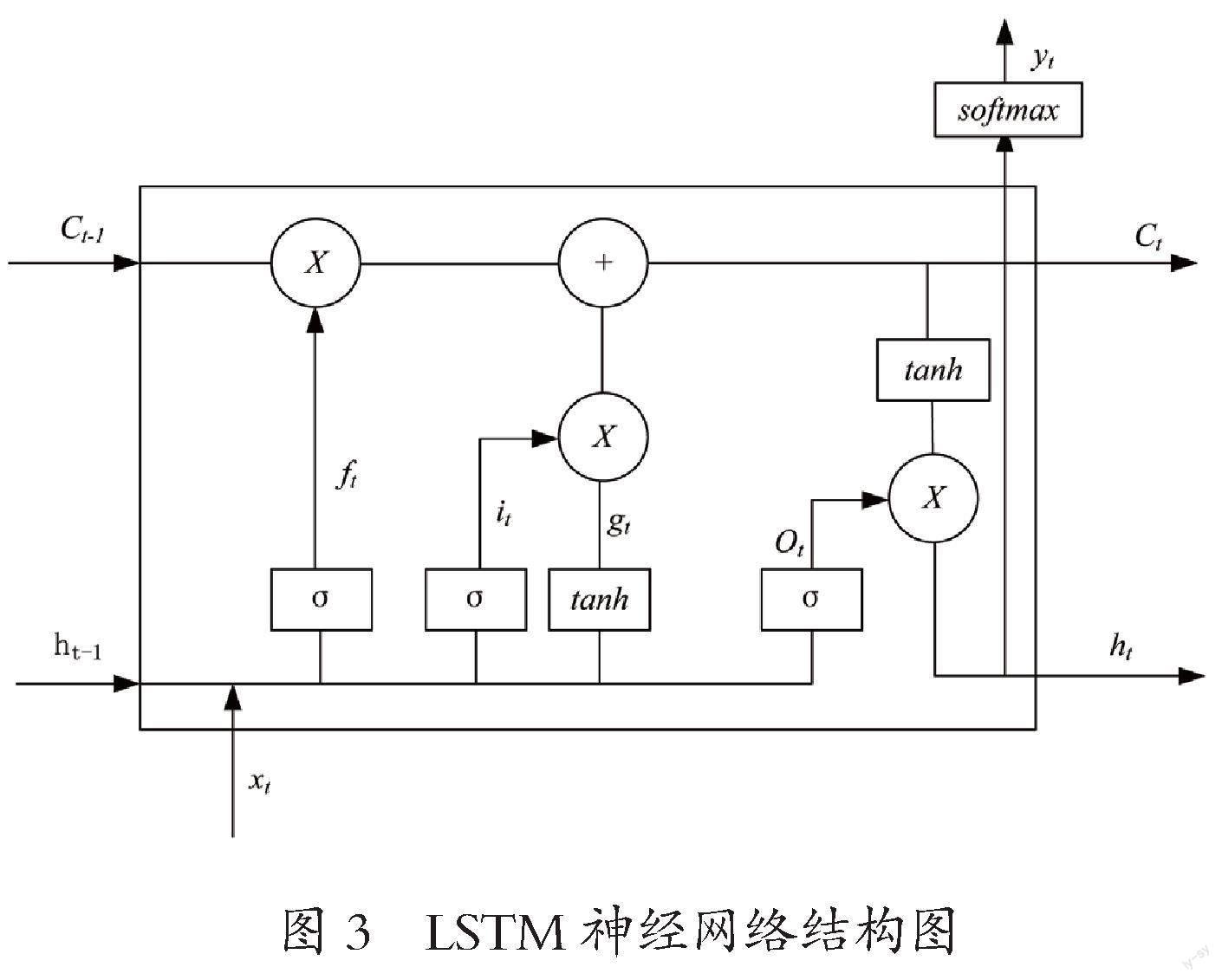
LSTM神經網絡預測模型在由循環神經網絡(RNN)的基礎上改進而來[14],通過在循環神經網絡的基礎上加入遺忘門、輸入門和輸出門,從而實現即使是早期輸入的信息也可貫穿到最后的輸出中。其網絡結構如圖3所示。
遺忘門數學表達式如式(1)所示,遺忘門的作用是挑選出有用的信息。其模值在0到1之間,0代表完全遺忘,1則代表全部記憶。
式中:ft為t時刻遺忘門的輸出值,Wfh,Wfx為權值;ht-1為t-1時刻隱藏層的輸出值;xt為t時刻輸入值;bf為偏置項。
輸入門的第一步與遺忘門相同,如式(2)所示,將有用信息保留下來。第二步如式(3)所示,產生一個新的候選向量gt。
式中:it,gt為t時刻輸入門的2個輸出值;Wih,Wix, Wgh,Wgx為權值;bi,bg為偏置項。
當完成遺忘門與輸入門后,需要重新更新細胞狀態,其數學表達式如(4)所示,這一步的目的是記住在這一時刻需要記住的信息,完成這兩步后的結果則是在這個時刻下的細胞狀態。
式中: 是t時刻的細胞狀態; 是t-1時刻的細胞狀態。
當更新完細胞狀態后,則可以通過輸出門得到輸出值,輸出門的數學表達式如式(5)、(6)所示:其中式(5)的作用是確定細胞狀態 中的哪些信息需要輸出,最后通過式(6)得到最終的隱藏層輸出值ht,而真正得到的輸出值yt如式(7)所示。
式中:ot為t時刻輸出門的輸出值;Woh,Wox為權值; bo,by為偏置項; 為t時刻的隱藏層輸出值;yt為t時刻實際輸出值。
3.2 模型設計
本節考慮船舶交通流特性,采用長短期記憶(LSTM)神經網絡模型對船舶交通流量進行預測。為了捕捉時間序列的長期依賴性,本文將LSTM的時間序列維度設置為90天,即每次訓練提取前一個季度(90天)的船舶交通流數據作為訓練特征。為了增強模型的表達能力,本文使用不同的隱藏層(神經元個數設置為80)對模型進行訓練。
LSTM模型的訓練過程中,輸出結果通常通過兩種判定模式來決定。一種是達到最小損失值,即模型在訓練過程中逐漸減小損失函數的值。另一種是達到預設的迭代次數,即模型在經過一定次數的迭代后停止訓練。考慮到船舶交通流受季節、氣象、水文等因素的影響較大,模型很可能會陷入局部最優解,無法代表最優的訓練結果。因此,本節參考已有研究,將模型的訓練迭代次數設定為300次,以確保模型有足夠的訓練機會來學習數據的復雜模式。此外,為了減少模型的復雜度和過擬合的風險,將隱藏層節點數設為10。采用Adam優化器作為優化算法,它結合了自適應學習率和動量的優點,可以更有效地更新模型的參數。同時,將批量處理值(batch size)設置為32,用以在每次迭代中同時處理32個樣本,提高訓練效率。
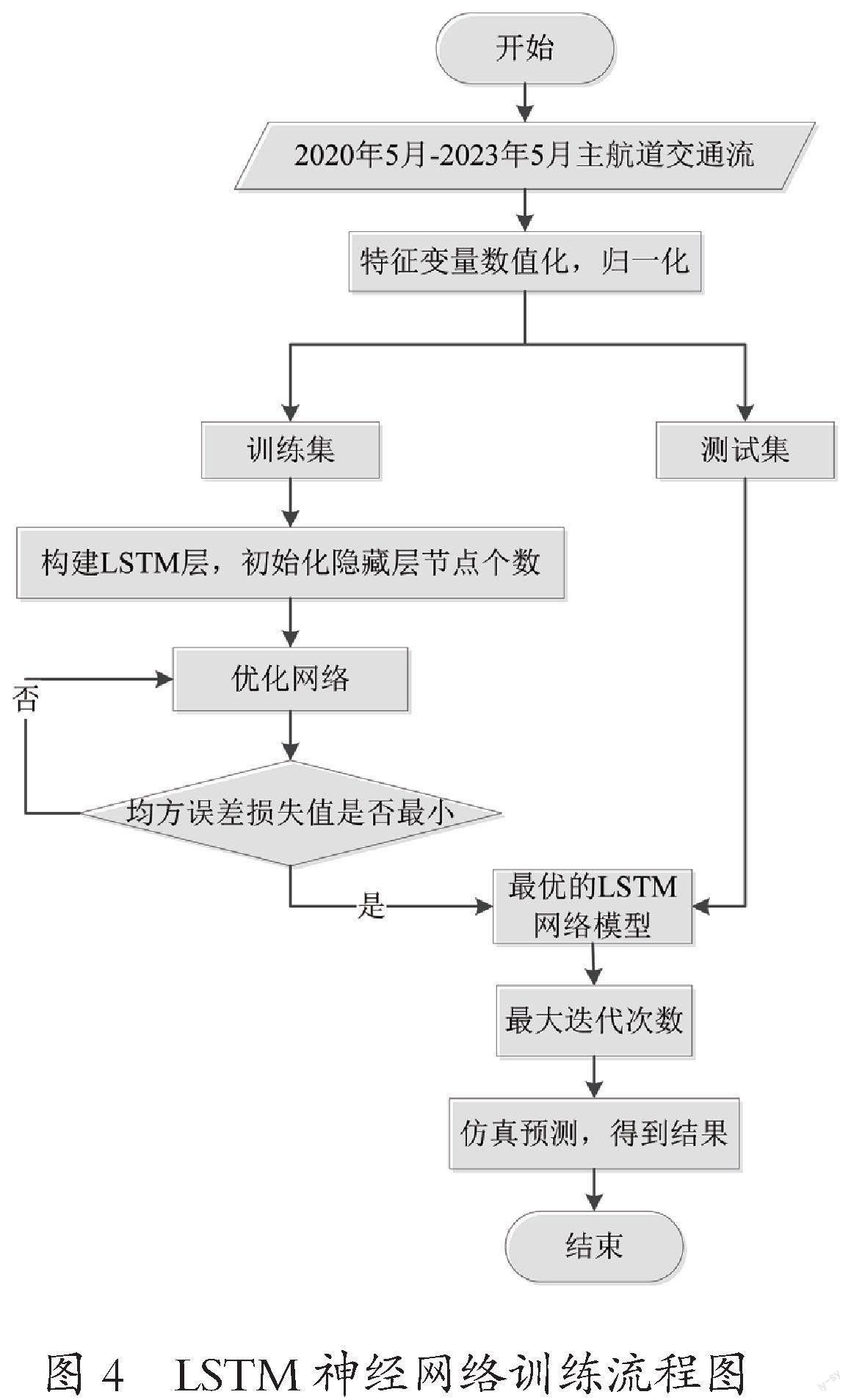
基于LSTM長短時記憶神經網絡的訓練算法流程圖如圖4所示。首先,需要對數據進行預處理,將交通流數據特征變量進行數值化、歸一化處理。再將數據集分為訓練集和測試集,本文中訓練集與測試集的劃分比例為8:2。訓練集用于訓練LSTM模型的參數和權重。通過提供歷史的交通數據和對應的實際流量情況,使模型能夠學習到數據中的模式和趨勢。測試集用于評估已訓練模型的性能和泛化能力。通過在測試集上進行預測,并與測試集中的真實值進行比較,可以評估模型對未來數據預測的準確性。接著構建LSTM層,初始化隱藏層節點個數。再以均方誤差值最小為標準,對LSTM網絡進行優化,得到最優的LSTM神經網絡模型,進而利用最優模型對所需數據進行預測。
4 結果與分析
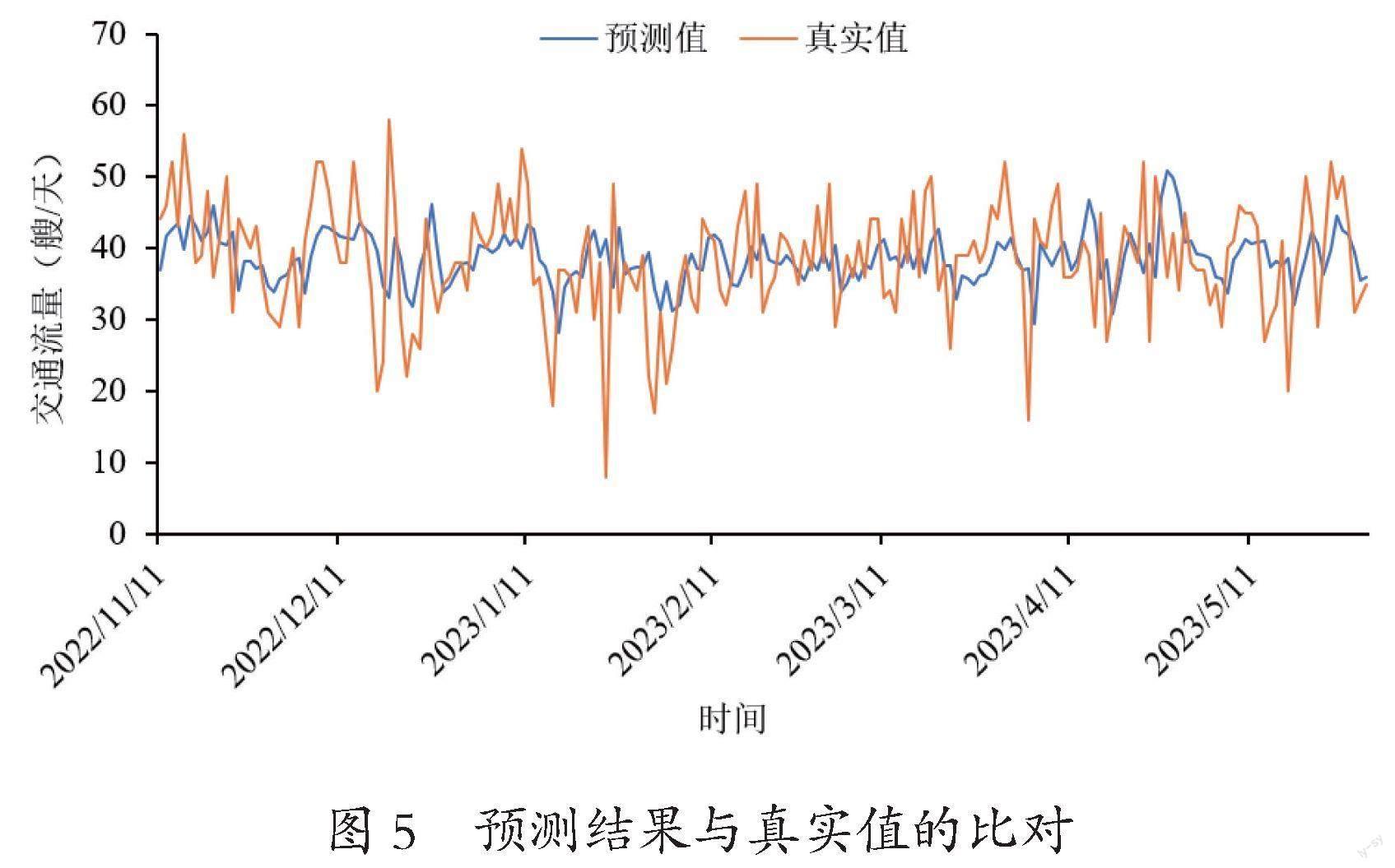
基于訓練得到的LSTM神經網絡模型,對船舶交通流進行預測,預測結果與真實值的趨勢如圖5所示,藍色的曲線為預測值,橙色的曲線為真實值。從圖中可以看出,預測值與真實值的變化趨勢較為一致,且兩者之間的差異較小。因此,所構建的LSTM模型能夠較好地捕捉交通流動態特征,對交通流狀況的擬合效果較為良好,可以用于后續預測。
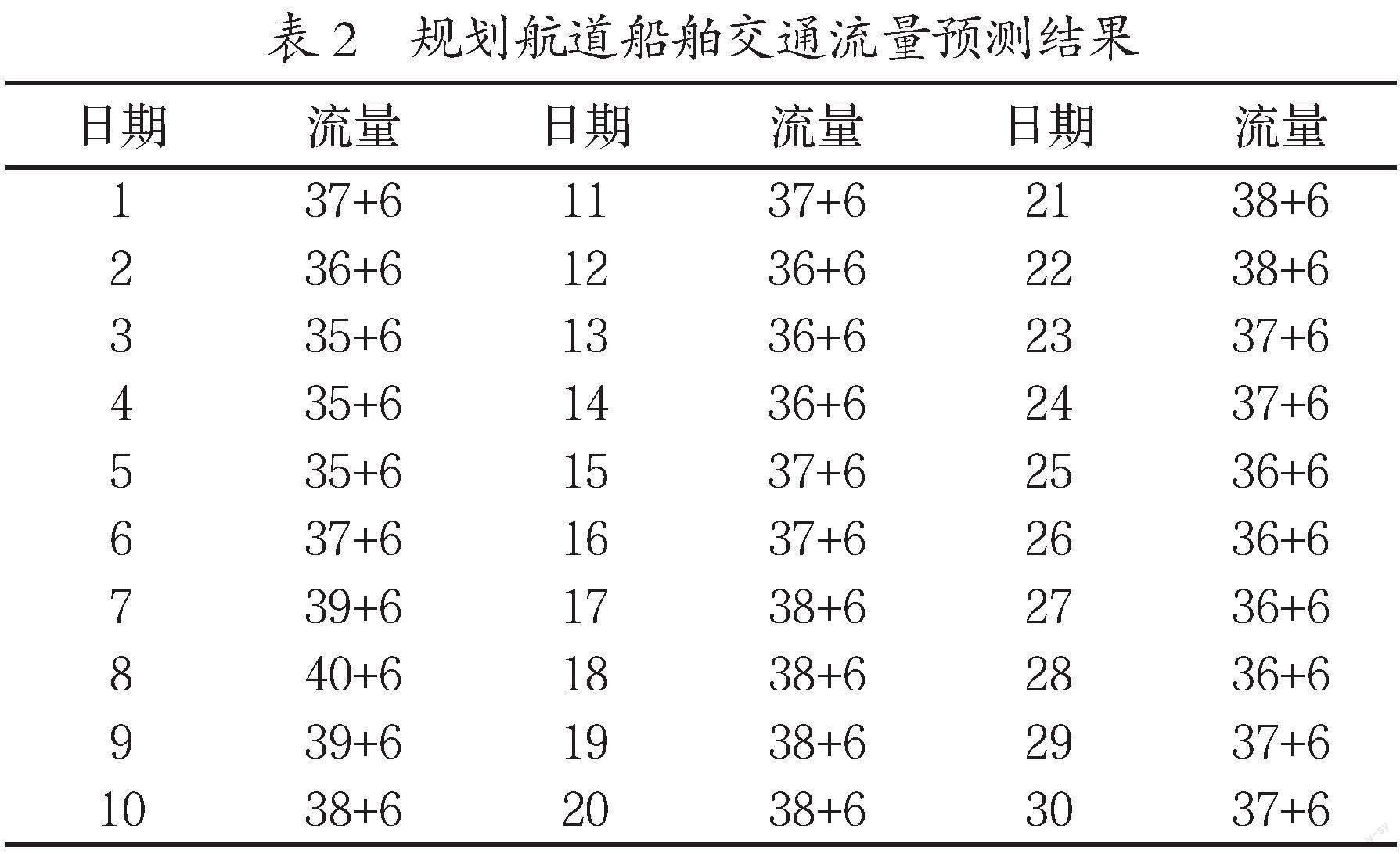
由于目前北側一期開港的碼頭規模與盛東碼頭規模接近,但北側運營船型尚未明確,所以對于開港初期的北側船舶流量,本文采用盛東碼頭開港初期的船舶流量作為修正值,來預測北側一期開港之后的總體交通流量。2006年,洋山深水港安全進出國際航行集裝箱船舶2 251艘次,平均每天約6艘次,故本文修正值為6,利用LSTM神經網絡模型對規劃航道未來30天的交通流量進行預測,并將預測值與修正值相加得到最終的預測結果,見表2。從表中可發現,規劃航道的交通流量平均約為37+6艘/天。這一平均值意味著未來規劃航道船舶流量的基本水平,為航道規劃和資源分配提供重要的參考。
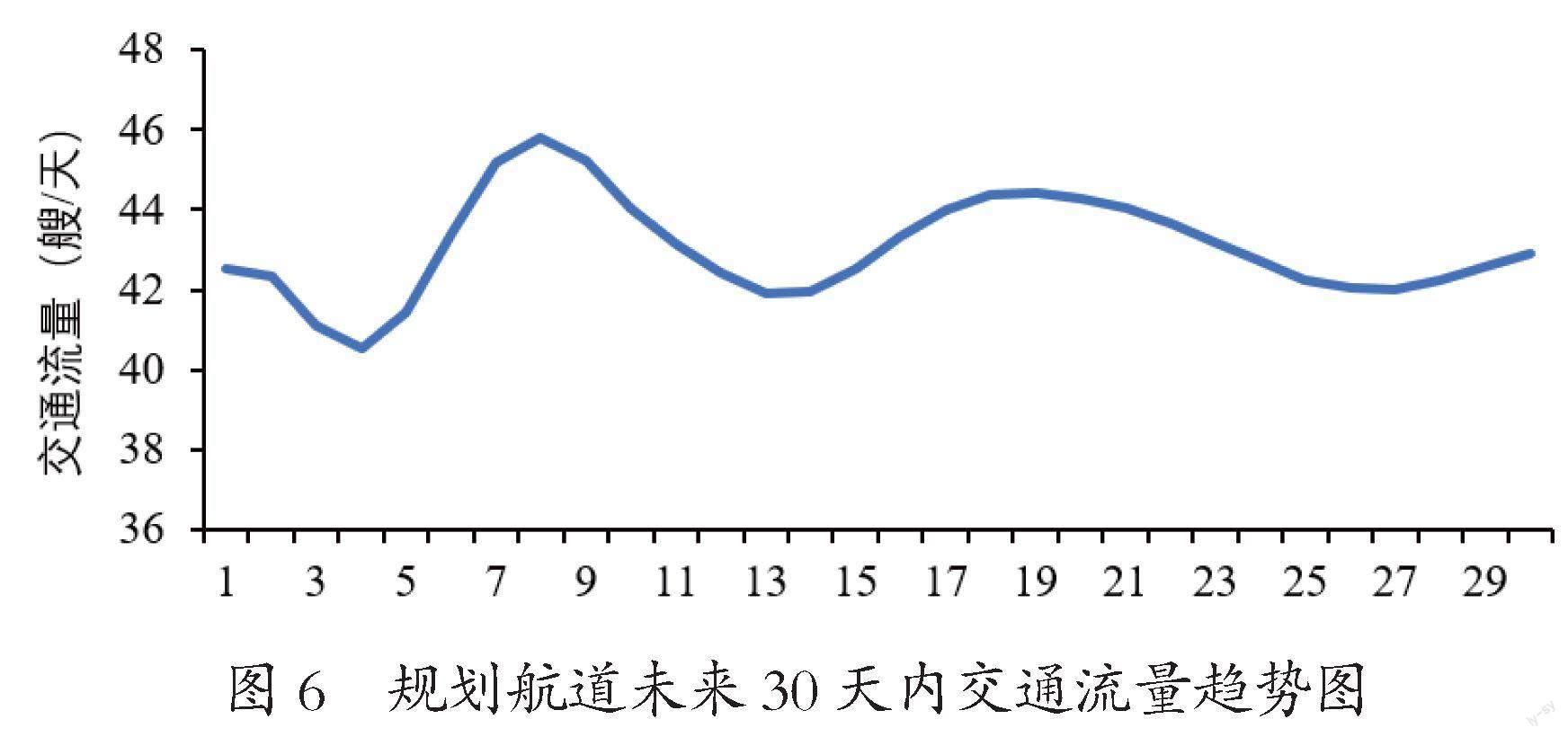
為了更好地展示交通流量的變化趨勢,進一步繪制了規劃航道船舶交通流量未來30天內的趨勢圖,如圖6所示。從圖中可以觀察到,船舶交通流量隨著時間的變化呈現出一定的波動。在觀察期內,交通流量大致在41~46艘/天之間波動。此外,在月初、月中以及月末這些時間點,船舶交通流量達到低點,這一現象可能與航道使用模式、航行計劃或其他因素有關。
5 結論
新的規劃方案將在小洋山北作業區新建航道與錨地,為提前掌握與了解規劃航道交通流概況,本文考慮到規劃航道的地理位置、氣象水文條件以及專家的經驗知識,將交通流量預測分為兩個關鍵部分。第一部分根據現有碼頭條件,以天為單位對主航道內的船舶交通流量進行預測。第二部分參考盛東國際集裝箱碼頭在開港初期的單日平均船舶流量作為修正值,在第一部分預測的基礎上進行適當修正作為規劃投產后洋山港進出港船舶流量的預測值。
研究結果顯示,小洋山北作業區投產初期,洋山港主航道平均交通流量預計約為43艘/天,交通流量水平在41~46艘/天之間波動。這一發現對于海事管理部門具有重要意義,有助于制定有效的航道管理和資源分配策略,以確保洋山深水港船舶安全航行。
參考文獻
[1] 趙一飛.上海國際航運中心洋山深水港區國際中轉業務的新里程碑[J].集裝箱化,2021,32(12):1-2+19.DOI:10.13340/j.cont.2021.12.001.
[2] 洋山深水港區四期工程上海國際航運中心[J].城鄉建設,2021(18):72-73.
[3] 王桂英.發展國際集裝箱水水中轉助推上海國際航運中心建設——以洋山港為例[J].物流工程與管理,2012,34(05):1-2+7.
[4] 陳煒俊.上海港洋山深水港區發展對策[J].集裝箱化,2012,23(02):16-19.
[5] 黃少卿.洋山港——名副其實的東方大港[J].港口經濟,2016(07):53-55.
[6] 童建,游林,孫武等.基于LSTM網絡的橫山水庫日來水量預測[J].水土保持應用技術,2023(05):1-4.
[7] 丁騰騰.基于LSTM的船閘位移預測模型研究[J].現代信息科技,2023,7(16):155-158.DOI:10.19850/j.cnki.2096-4706.2023.16.034.
[8] 張瀟瀟,龔龑.基于LSTM的滬渝高速公路短時交通流預測研究[J].中國交通信息化,2022(09):133-137.DOI:10.13439/j.cnki.itsc.2022.09.012.
[9] 趙洪緒,柴世超,毛敏等.基于長短期記憶神經網絡模型的分層注水優化方法[J].中國海上油氣,2023,35(04):127-137.
[10] 金毅,謝輝煌,尹君等.基于LSTM-MPC的糧食干燥機智能控制方法研究[J/OL].糧油食品科技:1-11[2023-09-11].https://doi.org/10.16210/j.cnki.1007-7561.2023.05.004.
[11] 丁梓瓊,湯廣李,張波濤等.基于改進的長短期記憶神經網絡交通流預測[J].網絡安全與數據治理,2023,42(08):52-58.DOI:10.19358/j.issn.2097-1788.2023.08.009.
[12] 諸鑫,林孝先,劉慶紅等.基于神經網絡模型的綿陽市空氣質量指數預測[J].綿陽師范學院學報,2023,42(08):112-118.DOI:10.16276/j.cnki.cn51-1670/g.2023.08.016.
[13] 徐為海.基于BP神經網絡的鎮江地區土層剪切波速預測[J].山西建筑,2023,49(18):77-80.DOI:10.13719/j.cnki.1009-6825.2023.18.020.
[14] 丁梓瓊,湯廣李,張波濤等.基于改進的長短期記憶神經網絡交通流預測[J].網絡安全與數據治理,2023,42(08):52-58.DOI:10.19358/j.issn.2097-1788.2023.08.009.