基于Modelica的交流伺服控制系統建模與仿真
2024-02-21 06:00:00胡錦濤張寶坤鮑丙瑞
軟件導刊 2024年1期
胡錦濤,陳 路,楊 浩,張寶坤,鮑丙瑞
(蘇州同元軟控信息技術有限公司,江蘇 蘇州 215123)
0 引言
隨著電機制造技術、微電子技術、工業實踐的迅速發展,以交流電機為控制對象的交流伺服系統已廣泛應用于航空航天、電動汽車、工業機器人等高精度領域[1]。在交流伺服電機中,永磁同步電機(Permanent Magnet Synchronous Motor,PMSM)省去了勵磁線圈、滑環和電刷,具有轉動慣量小、響應速度快、功率密度高等優點,已成為伺服系統的主流機型[2-5]。現代機電產品已呈現出機、電、液、熱、控等不同領域子系統相結合的復雜特性,進行整體設計和分析時,不同領域的子系統間呈現出較強的耦合性,采用傳統單領域仿真分析工具無法滿足復雜系統的整體設計與分析,將多個單領域仿真工具聯合使用也無法從根本上滿足多領域耦合復雜系統的設計與分析需求。此外,實際工程中通常以采購配套交流伺服驅動產品為主,并未考慮系統自身進行建模,將不利于產品的計算機設計分析和數字化統一驗證[6-7]。
在復雜系統建模時,不同領域內的元件可用相同形式的代數方程、微分方程等進行描述。以此為基礎,多領域統一建模仿真技術將機、電、液、熱、控等不同領域的模型封裝為一個系統模型,以滿足生產過程中多領域耦合仿真的需求[8-9]。Modelica 語言作為一種開放的、面向對象的、基于方程的多領域統一建模語言[10],通過微分代數方程描述組件間的關系,無需對連接關系和求解序列進行解耦和推導,可顯著提升設計效率[11-13]。MWORKS 作為一個基于Modelica 的多領域建模與仿真平臺,由蘇州同元軟控信息技術有限公司設計與開發,在國內汽車、能源、航空、航天等領域內得到廣泛應用[14-16]。
本文以交流伺服控制系統的主流機型—永磁同步電機為研究對象,在MWORKS 平臺上建立基于Modelica 的PMSM 伺服控制系統仿真模型,為數控機床、風電變槳、雷達天線等系統的多領域建模與仿真、伺服驅動產品的數字化驗證提供了一種新思路。
1 控制原理
1.1 數學模型
考慮到PMSM 伺服控制系統在三相靜止坐標系下的數學模型存在非線性、強耦合、高階等特點,不利于模型分析和求解,為了簡化分析,忽略不計空間諧波、電機鐵芯飽和損耗、渦流和磁滯損耗、齒槽、換相和電樞反應的影響,且三相定子繞組嚴格對稱,在空間互差120°電角度。
此外,為了進一步簡化PMSM 的數學模型,使其更便于控制,在兩相同步旋轉坐標系下建立PMSM 數學模型。其中,式(1)、式(2)為電壓方程;式(3)為磁鏈方程;式(4)為轉矩方程;式(5)為機械運動方程[17-18]。
在該坐標系下,電機模型得到有效簡化和解耦合,便于設計PMSM 伺服控制器。其中,ud、uq分別為定子d 軸、q軸電壓;id、iq分別為定子d 軸、q 軸電流;ψd、ψq分別為定子d軸、q軸磁鏈;Ld、Lq分別為定子繞組d軸、q軸電感;R為定子電阻;p為微分算子;np為極對數;J為轉動慣量;ψf為永磁體磁鏈;Te、TL分別為電磁轉矩和負載轉矩;we、wm分別為電角速度和機械角速度;B為系統阻尼系數。
1.2 伺服控制
本文在PMSM 伺服控制系統設計方面,采用目前應用較為成熟的三環控制結構,基本環節包括電流控制系統、速度控制系統和位置控制系統,具體控制原理如圖1所示。

Fig.1 Principle of PMSM servo control system圖1 PMSM伺服控制系統原理
圖1 由內至外依次為電流環、速度環和位置環[19-20]。其中,由于電流環與被控對象最近,其調節器參數對系統影響較大;速度環作為PMSM 伺服控制系統的重要組成部分,具有響應速度快、控制精度高和調速范圍廣等特點;位置環處于最外層,具有良好的定位跟蹤精度和速度響應能力。具體實現過程中,經電流傳感器測得三相定子電流,通過坐標變換后作為內層電流環的反饋信號輸入,在基于轉子磁場定向坐標系下,定子電流矢量被分解為勵磁分量和轉矩分量,二者相互垂直實現磁鏈和轉矩的解耦控制。
位置傳感器和速度計算模塊分別測得PMSM 轉子的位置信號和轉速信號,作為位置環、速度環的反饋信號輸入。位置環的輸出信號由速度環處理,速度環的輸出信號由電流環處理。電流環輸出的兩相旋轉坐標系定子電壓Ud、Uq經Park 逆變換后得到Uα、Uβ,然后通過空間矢量脈寬調制技術(Space Vector Pulse Width Modulation,SVPWM)對三相逆變器功率管的開關時序與脈寬大小進行控制,從而實現PMSM 的高精度伺服控制過程。
2 多領域統一建模
MWORKS 作為一個基于Modelica 的多領域統一建模仿真平臺,在國內汽車、能源、航空、航天等領域已得到廣泛應用[21-22]。平臺中的可視化建模、物理單位推導與檢查、多工程領域系統建模等功能,在基于Modelica 語言的工程建模解決方案的設計與驗證過程中起著重要作用[23]。
根據PMSM 伺服系統的控制原理,本文借助多領域建模仿真平臺—MWORKS,對系統進行基于Modelica 語言的多領域統一建模與仿真,整體架構如圖2所示。
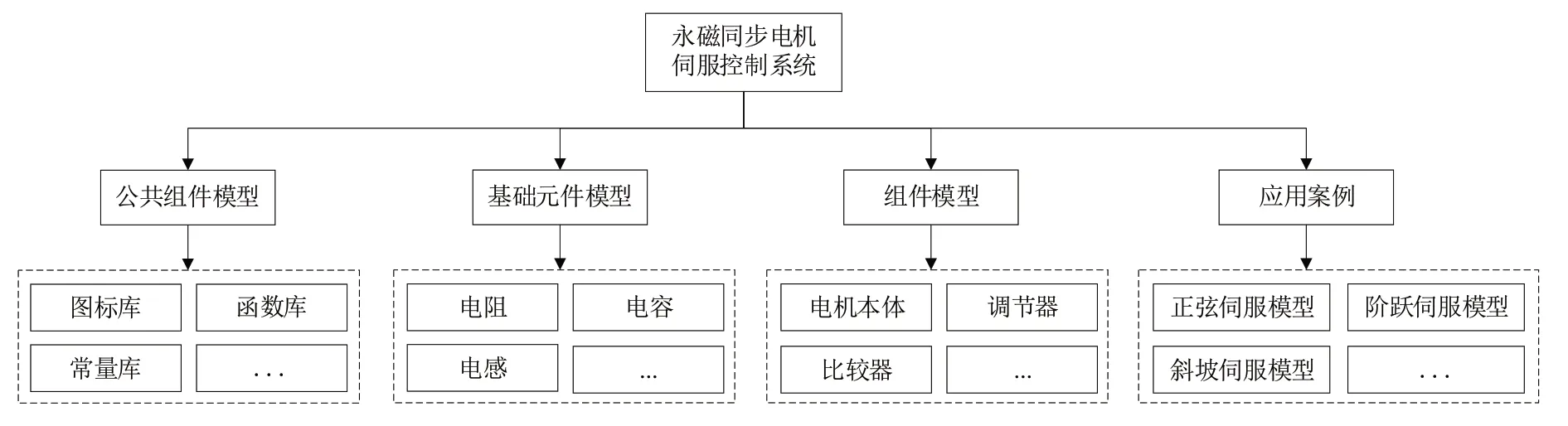
Fig.2 PMSM servo system model architecture圖2 PMSM伺服系統模型架構
2.1 PMSM本體
在PMSM 伺服控制系統中,PMSM 本體作為控制對象,在MWORKS 平臺中對其進行Modelica 建模。通過輸入三相交流電,經過坐標變換、氣隙模型中的機電轉換等過程后輸出機械能,電機本體模型圖標與內部結構如圖3所示。

Fig.3 PMSM body module圖3 PMSM本體模塊
2.2 逆變器
在設計逆變器時,本文采用三相全橋逆變器結構,如圖4 所示。實際工作過程中,直流側接入直流電源后,在系統三環控制作用下,上游SVPWM 模塊輸出一定占空比的開關信號至逆變器中,以有效控制各路開關的通斷邏輯,從而控制三相逆變器模塊輸出目標電壓矢量。

Fig.4 Inverter module圖4 逆變器模塊
2.3 SVPWM調制
在PMSM 伺服系統控制器中,采用SVPWM 技術對逆變器輸出的電壓矢量進行控制,以圓形旋轉磁場為目標,最大限度追蹤PMSM 的磁鏈軌跡,以達到轉矩的最佳控制效果[24-25],SVPWM 模塊內部結構如圖5所示。

Fig.5 SVPWM module圖5 SVPWM模塊
在實際設計時,三相逆變器中的6 個功率管對應8 種開關狀態,每一種狀態對應一個基本的空間電壓矢量,即為U0(000)、U1(001)、U2(010)、U3(011)、U4(100)、U5(101)、U6(110)和U7(111)。其中,U0(000)、U7(111)為兩個零矢量。
為了使三相逆變器輸出的實際磁通接近圓形,可將SVPWM 的8 個基本電壓矢量劃分為6 個扇區,如圖6所示。
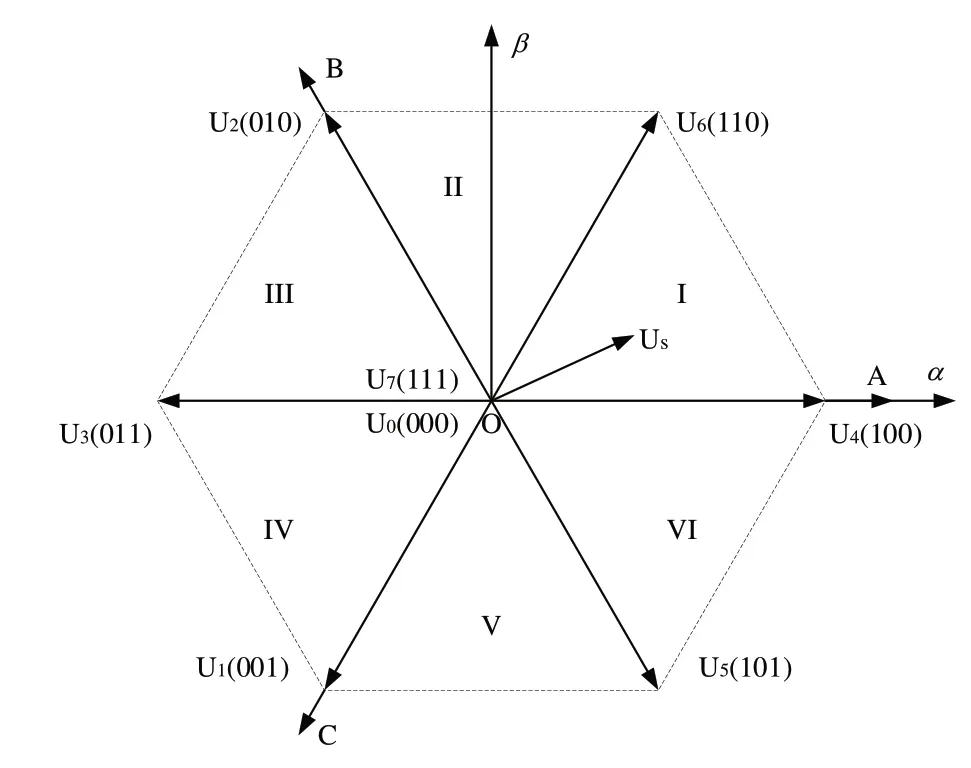
Fig.6 Voltage space-vector圖6 電壓空間矢量
2.3.1 扇區判斷
在應用SVPWM 技術時,首先需要確定合成的電壓矢量Us 所在的扇區,根據Uα、Uβ和扇區的關系可作如下變換:
式中:Uα、Uβ為電壓矢量的α 軸、β 軸分量;Ua、Ub、Uc為中間變量。
通過判斷中間變量極性,可得當前需要合成的電壓矢量Us所在的扇區。令:
設N=A+2B+4C,通過N 值可快速確定扇區位置,對應關系如表1所示。

Table 1 Correspondence between sectors and N values表1 扇區與N值對應關系
2.3.2 電壓矢量作用時間計算
設相鄰空間電壓矢量的作用時間分別為T1、T2,為了便于計算引入X、Y、Z中間變量,計算公式為:
式中:Udc為三相逆變器的直流側電壓;Uα、Uβ分別為電壓矢量的α 軸、β 軸分量;T為PWM 調制周期。
不同扇區T1、T2與X、Y、Z的對應關系如表2所示。

Table 2 Time of voltage vector action表2 電壓矢量作用時間
2.3.3 電壓矢量切換點計算
根據確定的扇區和計算的電壓矢量作用時間,將其轉化為三相逆變器中各個開關管的切換時刻,引入3 個時間變量Ta、Tb、Tc,具體計算公式為:
設不同扇區內電壓矢量切換點依次為Taon、Tbon、Tcon,與Ta、Tb、Tc的對應關系如表3 所示。最后,利用周期為T、幅值為T/2 的等腰三角波與各個切換點的位置信號進行比較,得到三相逆變器中各開關管的實際控制信號。

Table 3 Sector and voltage vector switching point表3 扇區與電壓矢量切換點
3 仿真與驗證
在MWORKS 平臺搭建基于Modelica 的PMSM 伺服控制系統仿真模型,如圖7 所示。電機的主要參數為額定電壓38 V,額定頻率50 Hz,定子電阻1.05 Ω,極對數1,d軸電感0.7 mH,q 軸電感為0.7 mH,漏感0.01 mH。為了滿足工業場景中的跟蹤控制需求,PMSM 伺服控制系統需要滿足各類工況中目標轉速或位置跟隨性能。
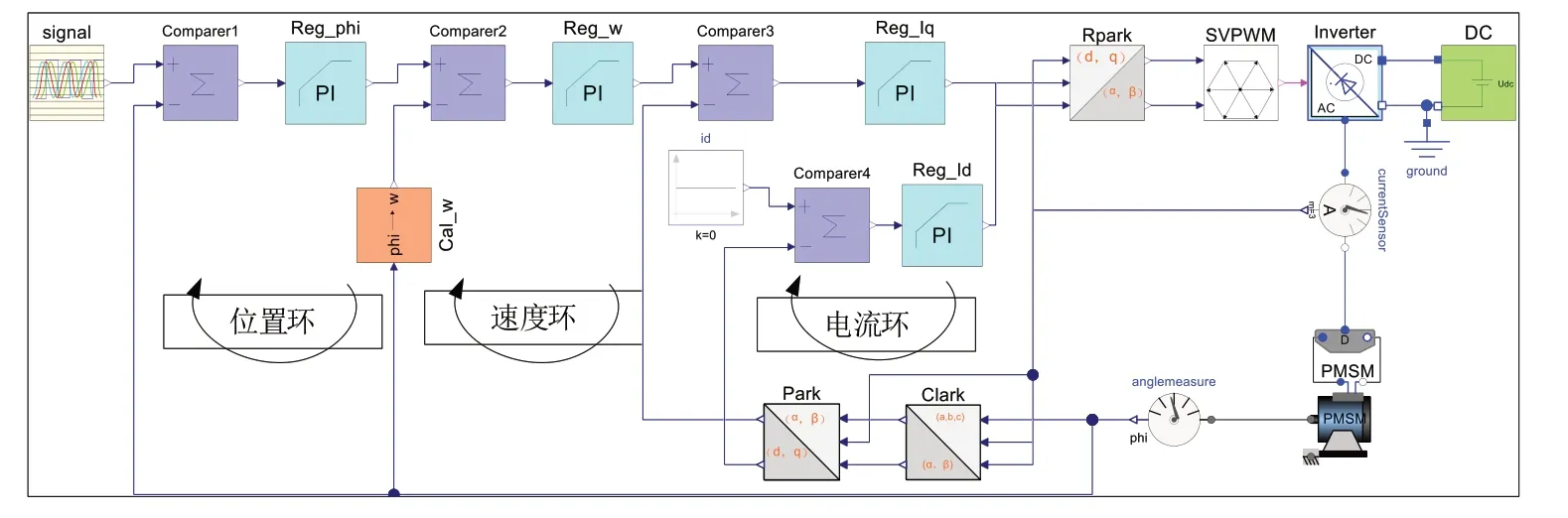
Fig.7 Modelica model of PMSM servo control system圖7 PMSM伺服控制系統Modelica模型
3.1 位置環仿真
PMSM 伺服控制常用于雷達天線、風電變槳、飛行器姿態調整等高精度位置控制的場景中,為此本文在MWORKS 平臺中對系統模型進行了3 種典型工況的位置控制測試,仿真結果如圖8—圖10 所示。通過模擬恒值信號、分段斜坡信號和正弦信號的變化過程,證明了PMSM伺服系統的跟隨效果好,誤差均小于0.5%,能滿足工業場景的應用需求。

Fig.8 Result of position loop following in condition 1圖8 工況1位置環跟隨結果

Fig.9 Result of position loop following in condition 2圖9 工況2位置環跟隨結果

Fig.10 Result of position loop following in condition 3圖10 工況3位置環跟隨結果
3.2 速度環仿真
除了工業場景中的位置控制外,轉速控制需求較為常見,例如醫療設備、壓縮機、飛機發動機等系統。在MWORKS 平臺中對系統模型進行3 種典型工況的速度控制測試,仿真結果如圖11—圖13 所示。通過模擬恒值信號、分段斜坡信號和正弦信號的變化過程,證明了PMSM伺服系統的跟隨效果好,誤差均小于0.5%,能滿足工業場景的應用需求。

Fig.11 Result of speed loop following in condition 1圖11 工況1速度環跟隨結果

Fig.12 Result of speed loop following in Condition 2圖12 工況2速度環跟隨結果
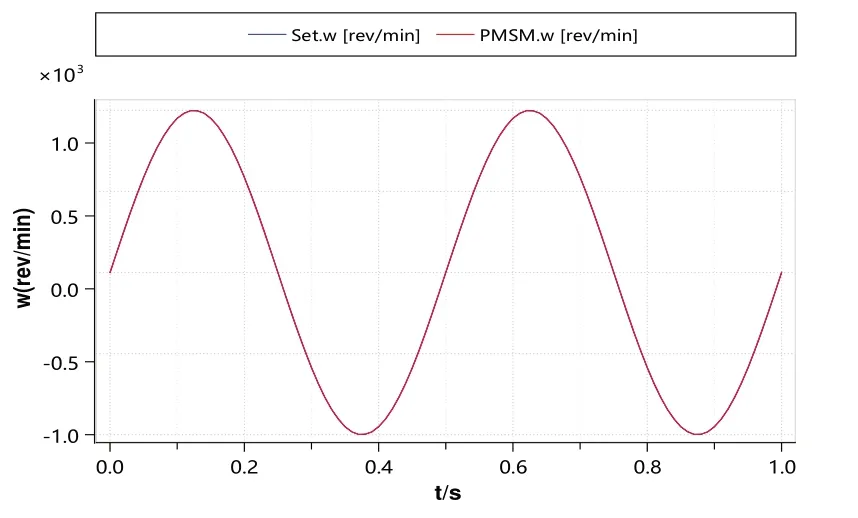
Fig.13 Result of speed loop following in condition 3圖13 工況3速度環跟隨結果
4 結語
本文通過分析PMSM 伺服控制系統的基本組成和工作原理,借助多領域建模仿真平臺MWORKS 構建了基于Modelica 的PMSM 伺服系統仿真模型,并測試了位置控制、速度控制的多種典型工況。
結果表明,基于Modelica 的PMSM 伺服控制系統模型動態特性好,跟隨誤差均小于0.5%,能較好地模擬實際工況應用過程,可為后續雷達跟蹤、飛行器姿態控制、數控機床等系統仿真提供建模基礎,也可為機械、電氣、液壓、控制等多專業融合復雜系統的仿真建模與伺服驅動產品的數字化驗證提供參考。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
核科學與工程(2015年4期)2015-09-26 11:59:03
