基于整車控制功能仿真的城市軌道交通列車模擬駕駛系統研究
2024-02-22 07:24:54郭超王延翠王田農譚曉彪劉海波
鐵道通信信號 2024年2期
郭超,王延翠,王田農,譚曉彪,劉海波
隨著計算機技術的飛速發展,利用計算機仿真和虛擬現實技術搭建列車模擬駕駛操作平臺和操作環境,在現代司機駕駛培訓和考核中廣泛應用。模擬駕駛中的牽引制動仿真控制主要利用計算機仿真技術實現:成利剛等[1]研究了列車牽引仿真模型,提升了系統的運行控制真實性;蔡忠法等[2]通過對輸入的操作指令線性化處理,提出結構簡化的汽車速度和方向控制模型;孫壯等[3]研究了一種半實物半虛擬的模擬駕駛動力學仿真平臺,實現了根據線路數據和司機操作指令實時更新仿真模型。計算機圖像生成技術的應用提升了模擬駕駛系統的沉浸駕駛體驗:王懷松等[4]提出了基于三維視景的列車運行仿真平臺;牛清華等[5]采用MultiGen Creator構建三維視景模型,實現了初級虛擬城軌列車訓練駕駛器;譚喜堂等[6]采用視頻壓縮技術和多媒體聲音系統,設計了具有4層5自由度液壓運動平臺的駕駛仿真器。一些學者進一步研究了列車模擬駕駛系統的擴展培訓功能:查偉等[7]將PLC型模擬駕駛臺接入卡斯柯既有城軌信號綜合仿真平臺(iVP200),實現了模擬駕駛臺的信號聯動仿真培訓功能;蘇虎等[8]基于DIS通信協議構建了一種分布式列車駕駛仿真器,實現了多仿真器協同訓練。但以上列車模擬駕駛系統的研究未充分考慮列車的控制電路邏輯、整車仿真模型聯動邏輯,無法實現列車控制電路邏輯仿真和子系統控制功能仿真。
本文提出一種基于整車控制功能仿真的城市軌道交通列車模擬駕駛系統,依據實際列車電氣設計原理圖,搭建列車電路仿真模型,集成各子系統控制功能仿真模型,真實還原列車控制邏輯、操控過程、牽引制動特性,從視覺、聽覺、操作感受等方面還原列車實際駕駛場景,同時能夠模擬列車電氣元器件故障場景和線路、設備突發事件,培訓司機故障處置、排查能力以及支撐車載各關鍵業務系統開發對仿真驗證環境的客觀需求。
1 總體架構
基于整車控制功能仿真的城市軌道交通列車模擬駕駛系統主要包括操作臺、人機交互系統、數據采集與仿真控制設備、視景及聲音仿真系統、教員系統,系統架構見圖1。

圖1 列車模擬駕駛系統架構
1.1 操作臺
操作臺設置了與真實列車操作臺一致的控制器件,包括司控器、開關、按鈕、指示燈、儀表等。控制器件具有與實際列車對應設備相同的功能與控制邏輯。
1.2 人機交互系統
人機交互系統包括故障排查顯示屏、乘客信息系統(Passenger Information System,PIS)廣播控制盒、無線電控制盒、列車控制與監控系統(Train Control and Monitoring System,TCMS)顯示器、視頻監控系統(Closed-Circuit Television,CCTV)監控屏、車載信號顯示器及通信、顯示設備控制計算機。
故障排查顯示屏用于司機室、客室各電氣柜的斷路器、開關、繼電器等器件的人機交互,可通過操作顯示屏上的設備,控制電路仿真模型對應元器件狀態,實現列車控制及故障排查;PIS廣播控制盒可實現人工廣播、全自動報站、手動報站等功能;車載CCTV監控屏預存列車監控視頻文件,可通過觸摸顯示器查看各攝像頭預存監控畫面[9],當整車控制功能仿真平臺模擬列車觸發緊急情況時,如火災、車門緊急解鎖等,CCTV監控屏可聯動顯示故障位置監控畫面;無線電控制盒支持司機與教員系統通話功能,模擬真實行車過程中司機與行車調度臺通話、接收行車調度臺的廣播呼叫、緊急呼叫等;TCMS顯示器與整車控制功能仿真平臺進行數據交互,獲取列車各子系統的狀態信息,展示車輛狀態信息、操作提示等,同時可操作TCMS顯示屏將控制命令輸出至相應的子系統仿真模型,實現對子系統的控制,如牽引、輔助故障復位等;車載信號顯示器向列車駕駛員提供信號運行模式、故障、操作等信息,與整車控制功能仿真平臺輸出的列車控制模式配合實現列車控制系統自動駕駛(ATO)、ATP監督下的人工駕駛(ATP)、限制人工駕駛(RM)、非限制人工駕駛(NRM)、自動折返(ATB)等駕駛模式及運行等級下的正常/故障場景功能仿真。
1.3 數據采集與仿真控制設備
數據采集與仿真控制設備包括數據采集單元、邏輯控制與故障仿真計算機、網絡交換機。
數據采集單元配置數字量輸入輸出板、模擬量輸入輸出板,用于采集操作臺控制器件的數字量(開關、按鈕)、模擬量(司控器)信號,通過以太網將輸入信號轉發給邏輯控制與故障仿真計算機。
邏輯控制與仿真計算機搭載整車控制功能仿真平臺,用于實現模擬駕駛系統各項控制功能,包括列車特性仿真、列車駕駛模式及運行等級模擬、列車故障或突發事件模擬、電路邏輯仿真等。在進行邏輯運算后根據當前列車狀態,將操作臺器件狀態發送給數據采集單元,控制和驅動對應指示燈、儀表動作。
邏輯控制與故障仿真計算機、數據采集單元、人機交互系統、視景與聲音模擬系統、教員系統通過交換機組建局域網,實現各設備間數據通信。
1.4 視景及聲音仿真系統
視景仿真系統采用計算機生成圖像技術[10]實現視景仿真,能夠真實反映線路行車設備、自然景觀、沿途車站等信息,可根據列車速度變化,實現視景的聯動變化。聲音仿真系統提供運行環境的聽覺效果,仿真列車運行時的聲音環境。
1.5 教員系統
教員系統實現對多臺司機駕駛操作臺的控制,主要功能如下。
1)系統數據庫管理、學員及教員信息管理。
2)培訓/考核課程編輯,故障信息的編輯與管理。
3)對駕駛操作臺進行獨立或批量課程發布。
4)學員綜合評分及多維度能力評估,評估報表生成及培訓記錄管理。
5)設定各駕駛操作臺的運行環境與工況,對駕駛模擬過程進行監控與干預。
2 整車控制功能仿真平臺設計
2.1 平臺架構
列車模擬駕駛系統基于整車控制功能仿真平臺實現核心的邏輯控制與故障仿真,仿真平臺包括通信層和執行層,其架構見圖2。
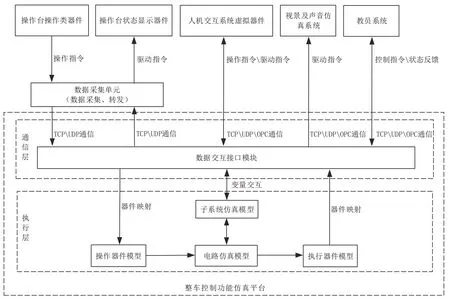
圖2 平臺架構
通信層負責仿真平臺與外圍的控制類、顯示類系統進行數據交互。仿真平臺支持通過網絡傳輸控制協議(Transmission Control Protocol,TCP)、用戶數據報協議(User Datagram Protocol,UDP)、進程控制對象連接(OLE for Process Control,OPC)協議與數據采集單元、人機交互系統、視景及聲音模擬系統、教員系統通信,并實現操作器件的控制指令輸入和顯示設備的驅動。
執行層根據外圍輸入變量執行邏輯控制,實現電路邏輯仿真、子系統狀態仿真,并輸出外圍設備狀態驅動變量。仿真模型的操作器件、執行器件分別和外圍設備對應的實際操作、執行器件變量映射,實現司機操作指令向仿真模型的傳遞和仿真模型對外圍執行器件的驅動控制。
2.2 平臺功能
2.2.1 整車電路邏輯仿真
整車控制功能仿真平臺支持搭建車輛控制電路仿真模型,根據司機操作指令,模擬車輛各子系統控制回路的動態邏輯變化。
電路仿真模型中的虛擬操作臺器件與數據采集單元的實體器件(開關、按鈕、司控器)綁定,實現實體器件與模型聯動。仿真平臺根據采集的輸入指令,進行邏輯仿真和運算后,輸出儀表、指示燈驅動指令,實現實體儀表、指示燈的控制。
2.2.2 列車運行特性仿真
列車運行特性仿真模塊模擬實際列車的加速度及常用制動、緊急制動、快速制動等特性,仿真列車在不同的線路條件、運行阻力、列車載重、牽引供電電壓等工況下的運行特性;將列車牽引制動仿真模型與實際線路信息、車輛控制指令結合,實現列車實時速度、位置、加速度等參數計算。列車運行特性計算流程見圖3,計算步驟如下:

圖3 列車運行特性計算流程
Step 1根據輸入的車輛參數,計算列車基本運行阻力Frr
式中:V為列車速度,α、β、γ為列車不同載重所對應常數。
Step 2根據輸入線路參數,計算坡道阻力Frs和曲線阻力Frc
式中:Ws為列車靜態重量,g為重力加速度,S為線路最大坡度,Cr、Cr1為常數,R為線路最小曲線半徑。
Step 3由Frr、Frs和Frc可得列車運行阻力Fr
Step 4根據輸入的司機牽引、制動指令及牽引制動力參數,計算列車加速度a。
牽引狀態時,列車加速度為
制動狀態時,列車減速度為
式中:Fq為列車施加牽引力,Fb為列車施加制動力,ma為慣性質量。
Step 5根據列車當前狀態、位置,設置仿真步長,由列車加速度計算更新列車實時速度Vi+1和實時位置Si+1
式中:Δt為仿真計算步長。
圖4為列車運行特性仿真模塊計算輸出的特性曲線,包括列車位置、實時速度、運行時間等參數。
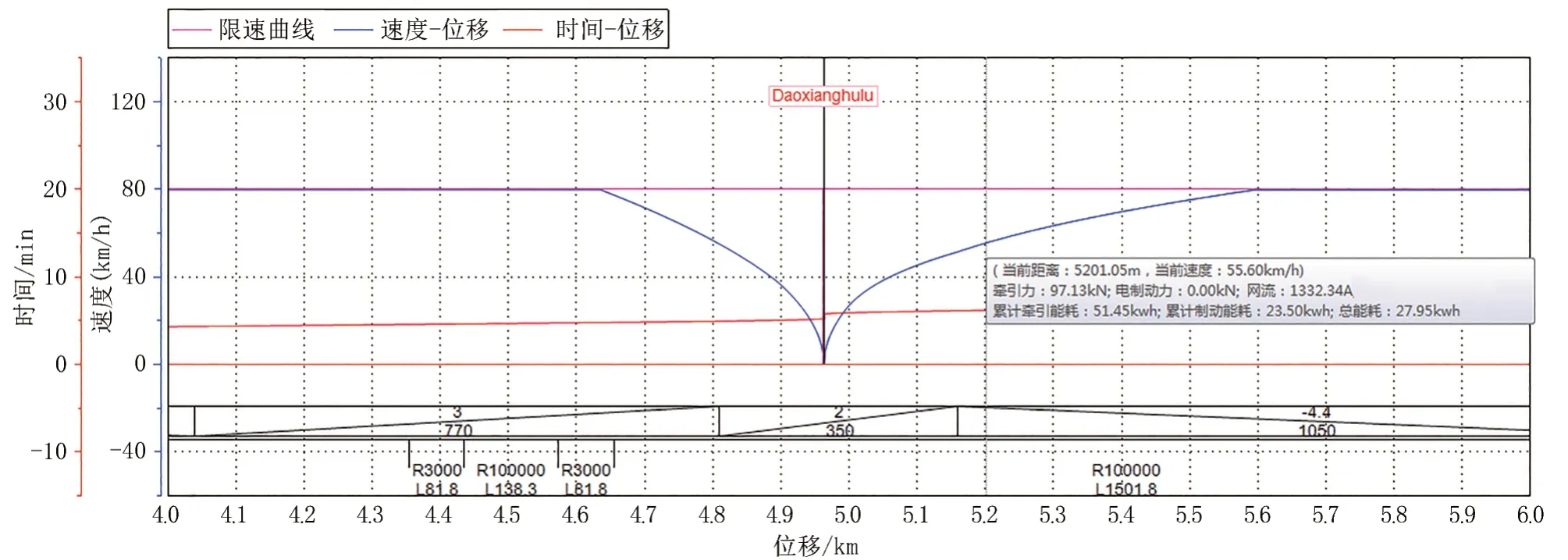
圖4 列車運行特性曲線
2.2.3 子系統控制功能仿真
搭建信號、輔助供電、車門等列車子系統功能模型,將模型與整車電路仿真模型連接,模擬子系統實際外圍控制電路邏輯,構建整車控制功能仿真模型。
1)信號系統仿真。模擬信號系統外圍車輛電路輸入輸出IO狀態,實現信號系統對車輛邏輯電路控制及狀態采集,從而仿真列車不同駕駛模式的切換。
2)輔助供電仿真。實現列車的輔助電源系統(三相電、直流電)與電源的邏輯關系,更新列車的電源總線、各子功能模塊的供電狀況,模擬列車低壓配電、高壓配電的控制邏輯和功能。
3)車門狀態仿真。根據司機指令、門控單元的輸入信號、故障設置等參數,實現車門開關、車門故障等控制邏輯模擬。
2.2.4 人機交互界面邏輯控制
整車控制功能仿真平臺中的電氣柜虛擬開關、按鈕、繼電器、儀表、指示燈等器件狀態,以及各子系統狀態信息,通過OPC協議、TCP協議或UDP協議轉發到人機交互系統。與故障排查顯示屏的電氣柜交互界面對應設備綁定,實現控制同步。并與TCMS顯示屏、車載信號顯示屏對應子系統狀態顯示模塊綁定,展示子系統狀態信息。
2.2.5 視景與聲音模擬系統聯動
視景及聲音仿真系統根據列車特性仿真計算的列車實時速度、位置等信息,聯動展示列車運行位置的自然景觀、沿途車站等視景信息,可模擬列車不同運行速度的軌道聲、風聲等。并根據整車控制功能仿真平臺輸出的子系統狀態信息,驅動對應的鳴笛聲、制動聲、電器件吸合/斷開聲等。
2.2.6 列車故障場景模擬
整車控制功能仿真平臺支持設置多種類型原理級故障(如繼電器觸點黏連、斷路器脫扣等)、子系統故障場景,與人機交互界面、視景及聲音仿真系統進行數據交互,實現列車真實控制邏輯及故障分析排查。
3 試驗測試
3.1 司機行車操作測試
司機按照正常行車過程操作,驗證列車邏輯是否符合要求。
司機操作:司機室激活,按下升弓按鈕,司控器至于前向位,牽引就緒后,推動司控器級位至牽引位。
試驗結果:司機室激活電路仿真模型中,有電回路、器件呈高亮顯示,司機室占有繼電器激活、列車占有繼電器激活;TCMS顯示屏顯示列車對應司機室激活,受電弓升弓,網壓正常(1 522 V),見圖5;視景系統根據列車速度、位置實時聯動顯示列車運行場景,見圖6;同時,聲音模擬系統聯動播放車輛運行環境聲音。

圖5 TCMS顯示界面狀態

圖6 視景系統聯動
3.2 列車超速信號觸發緊急制動
仿真模擬信號系統的整車聯動控制功能,以列車超速信號觸發緊急制動場景為例。
司機操作:駕駛列車使速度超過ATP緊急制動觸發速度。
試驗結果:列車未超速時,電路仿真模型中緊急制動電路得電,見圖7(a);列車超過ATP緊急制動觸發速度后,列車信號系統輸出緊急制動信號,電路仿真模型中信號機柜緊急制動干觸點斷開,使車輛緊急制動環路失電,見圖7(b),列車緊急制動;車載信號顯示屏顯示列車處于緊急制動狀態,見圖8。

圖7 緊急制動環路電路模型狀態

圖8 車載信號顯示屏顯示列車施加緊急制動
3.3 列車故障場景測試
在教員系統設置列車電路原理級故障場景,以受電弓異常降弓場景為例。
教員操作:選擇升弓使能丟失,受電弓異常降弓場景。
試驗結果:電路仿真模型中,升弓使能繼電器(K05)失電,導致電路失電,見圖9(a)。

圖9 升弓保持電路模型狀態
司機操作:故障排查時,查看TCMS顯示屏界面、故障排查顯示界面,升弓使能繼電器失電,則確認故障原因為升弓使能丟失導致異常降弓。操作故障排查顯示屏中升弓使能旁路開關,重新升弓。
試驗結果:升弓旁路繼電器(K03)得電,故電路得電,受電弓重新升起,見圖9(b)。符合真實列車故障工況狀態及應急處置邏輯流程。
4 結束語
本文提出的基于整車控制功能仿真的城市軌道交通列車模擬駕駛系統,通過試驗測試,可仿真列車控制邏輯、操控過程、牽引制動特性、故障場景及視聽效果,為司機駕駛訓練、故障演練提供了專業仿真培訓平臺,同時為同類仿真系統開發提供了技術參考。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中華詩詞(2022年6期)2022-12-31 06:41:24
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中國科技論壇(2017年7期)2017-07-25 08:49:53
光學精密工程(2016年6期)2016-11-07 09:07:19
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
