基于多策略混合改進(jìn)HHO算法的WSN節(jié)點(diǎn)覆蓋優(yōu)化
2024-02-22 07:58:54張士榮趙俊杰談發(fā)明
計(jì)算機(jī)工程與設(shè)計(jì) 2024年2期
張士榮,趙俊杰,談發(fā)明
(1.江蘇理工學(xué)院 信息中心,江蘇 常州 213001;2.江蘇理工學(xué)院 電氣信息工程學(xué)院,江蘇 常州 213001)
0 引 言
傳感器節(jié)點(diǎn)的部署及網(wǎng)絡(luò)覆蓋是決定WSN感知、通信質(zhì)量的關(guān)鍵,直接影響無線網(wǎng)絡(luò)的生存時(shí)間和網(wǎng)絡(luò)管理效率[1-3]。節(jié)點(diǎn)部署不佳會(huì)導(dǎo)致覆蓋盲區(qū)、節(jié)點(diǎn)密度過高和重復(fù)覆蓋、冗余節(jié)點(diǎn)多等問題,優(yōu)化WSN節(jié)點(diǎn)部署,以更少的WSN節(jié)點(diǎn)部署數(shù)量提高監(jiān)測(cè)區(qū)域覆蓋率將具有重要意義。
將WSN節(jié)點(diǎn)部署位置搜索與群體智能優(yōu)化算法相結(jié)合,可以利用智能算法優(yōu)異的隨機(jī)式和啟發(fā)式搜索機(jī)制加快節(jié)點(diǎn)部署位置的尋優(yōu)過程。哈里斯鷹算法HHO[4]是一種新的智能優(yōu)化算法,算法以哈里斯鷹種群對(duì)獵物的包圍、攻擊過程建立算法數(shù)學(xué)模型。該算法綜合性能較優(yōu)已廣泛應(yīng)用在圖像分割[5]、神經(jīng)網(wǎng)絡(luò)訓(xùn)練[6]、電力系統(tǒng)控制[7]、時(shí)差定位[8]等領(lǐng)域。但HHO算法本身還存在著易早熟收斂、求解精度低的不足。
為了解決WSN節(jié)點(diǎn)覆蓋優(yōu)化問題,本文設(shè)計(jì)一種改進(jìn)哈里斯鷹優(yōu)化算法MHIHHO求解節(jié)點(diǎn)覆蓋優(yōu)化問題。為了提高HHO算法的性能,設(shè)計(jì)Fuch無限折疊混沌初始化策略對(duì)種群進(jìn)行初始化;利用自適應(yīng)精英個(gè)體對(duì)立學(xué)習(xí)提高候選解質(zhì)量;引入正余弦優(yōu)化改進(jìn)局部開發(fā)中軟/硬包圍的跳躍式位置更新,提高局部尋優(yōu)能力;結(jié)合柯西與拉普拉斯最優(yōu)解變異實(shí)現(xiàn)變異,使算法跳離局部極點(diǎn)。結(jié)果表明,改進(jìn)哈里斯鷹算法MHIHHO在優(yōu)化WSN節(jié)點(diǎn)覆蓋率方面實(shí)現(xiàn)了預(yù)期效果。
1 相關(guān)研究現(xiàn)狀
智能優(yōu)化算法因具有較強(qiáng)的全局搜索能力,近年來被廣泛應(yīng)用于WSN節(jié)點(diǎn)覆蓋優(yōu)化問題。文獻(xiàn)[9]提出混合遺傳與差分進(jìn)化的多目標(biāo)覆蓋優(yōu)化算法,實(shí)現(xiàn)了傳感節(jié)點(diǎn)的優(yōu)化部署。文獻(xiàn)[10]利用虛擬力對(duì)傳統(tǒng)PSO進(jìn)行優(yōu)化,將節(jié)點(diǎn)覆蓋率提升了5%。文獻(xiàn)[11]提出外推改進(jìn)人工蜂群算法,應(yīng)用于WSN節(jié)點(diǎn)部署優(yōu)化后,模型的覆蓋率有所提高,但結(jié)果依然存在10%左右盲區(qū)。文獻(xiàn)[12]提出改進(jìn)灰狼優(yōu)化算法,節(jié)點(diǎn)覆蓋率提升了4%,但節(jié)點(diǎn)分布均勻性仍有不足。文獻(xiàn)[13]則引入了種群分布熵和平均粒距的概念,雖然覆蓋率接近于90%,但依然沒有解決好盲區(qū)。文獻(xiàn)[14]提出改進(jìn)鯨魚優(yōu)化算法,網(wǎng)絡(luò)覆蓋監(jiān)測(cè)效率有所提高。文獻(xiàn)[15]利用改進(jìn)果蠅算法對(duì)傳感節(jié)點(diǎn)覆蓋率和連通性進(jìn)行優(yōu)化,部署效果優(yōu)于蟻群算法。有關(guān)哈里斯鷹算法的改進(jìn)也有一些相關(guān)研究,但還未檢索到應(yīng)用在節(jié)點(diǎn)部署優(yōu)化問題中的文獻(xiàn),在HHO算法改進(jìn)工作上,文獻(xiàn)[16]結(jié)合偽反射學(xué)習(xí)機(jī)制設(shè)計(jì)新型哈里斯鷹算法QRHHO,一定程度提升了算法尋優(yōu)精度。文獻(xiàn)[17]結(jié)合混沌遍歷、規(guī)律、隨機(jī)思想改進(jìn)HHO,以混沌映射增強(qiáng)初始種群多樣性,并結(jié)合模擬退火對(duì)算法局部最優(yōu)跳離能力進(jìn)行改進(jìn)。文獻(xiàn)[18]結(jié)合長(zhǎng)期記憶法提高算法全局搜索能力。文獻(xiàn)[19]引入方形鄰域拓?fù)涓倪M(jìn)種群個(gè)體組成,通過縱橫雙向隨機(jī)覓食提高HHO開發(fā)能力。文獻(xiàn)[20]引入偽反向?qū)W習(xí)提高HHO初始種群的多樣性,進(jìn)一步提升算法收斂速度。
以上基于智能優(yōu)化算法的WSN節(jié)點(diǎn)覆蓋優(yōu)化策略,雖然可以有效優(yōu)化節(jié)點(diǎn)部署,但智能算法本身存在尋優(yōu)精度差和易于得到局部最優(yōu)的缺陷,且在搜索與精細(xì)開采過程的平衡、避免局部最優(yōu)等綜合性能上仍有一些不足。因此,針對(duì)WSN節(jié)點(diǎn)覆蓋率的提升和均勻度方面的優(yōu)化工作仍然有進(jìn)一步的研究空間。
2 HHO算法及其多策略混合改進(jìn)算法
2.1 HHO算法
HHO過程由搜索與開發(fā)兩個(gè)階段組成。兩個(gè)階段的切換則由獵物的逃逸能量系數(shù)E決定,不同E值會(huì)引導(dǎo)哈里斯鷹展現(xiàn)不同的捕食模式。能量系數(shù)E定義為
E=2E0(1-t/Tmax)
(1)
式中:t為當(dāng)前迭代,Tmax為算法最大迭代次數(shù),E0為獵物的初始能量,且E0=2r1-1,r1為[0,1]間的隨機(jī)量。式(1)表明:獵物的逃逸能量在算法迭代過程中將在(-1,1)間變化。
(1)全局搜索階段
若滿足 |E|≥1, HHO進(jìn)入全局搜索階段。此時(shí),哈里斯鷹將依據(jù)隨機(jī)選擇個(gè)體和目標(biāo)個(gè)體的位置對(duì)自身的位置進(jìn)行更新,數(shù)學(xué)模型如
Xi(t+1)=

(2)
(3)
式中:Xrand(t)、Xi(t)、Xrabbit(t) 分別指迭代t時(shí)隨機(jī)選擇個(gè)體位置、個(gè)體i原位置、種群全局最優(yōu)個(gè)體位置,Xi(t+1) 為個(gè)體i的更新位置,q、ri(i=1,2,3,4) 為(0,1)間的隨機(jī)量,[lb,ub] 為個(gè)體搜索邊界值,Xm(t) 為個(gè)體位置均值,N為哈里斯鷹的種群規(guī)模。
(2)局部開發(fā)階段
若滿足 |E|<1, HHO進(jìn)入局部開發(fā)階段。此時(shí),哈里斯鷹擁有4種不同的策略完成對(duì)獵物的捕食:軟包圍、硬包圍、漸進(jìn)式快速俯沖軟包圍和漸進(jìn)式快速俯沖硬包圍。而選擇哪種策略由獵物逃逸能量系數(shù)E和逃逸概率λ決定。
1)若滿足 |E|≥0.5且λ≥0.5,表明存在逃逸能量,此時(shí)的數(shù)學(xué)模型如
(4)
式中:ΔX(t) 為獵物與個(gè)體間距,r5為隨機(jī)量,J為逃逸跳躍值。
2)若 |E<0.5且λ≥0.5, 表明不存在逃逸能量,個(gè)體將以硬包圍方式對(duì)獵物發(fā)起突襲,數(shù)學(xué)模型如
Xi(t+1)=Xrabbit(t)-E|ΔX(t)|
(5)
3)若滿足 |E|≥0.5且λ<0.5, 表明獵物仍有充足能量逃逸,哈里斯鷹將以漸進(jìn)式快速俯沖軟包圍方式圍捕獵物,并實(shí)時(shí)糾正圍捕位置和方向,數(shù)學(xué)模型如
Xi(t+1)=

(6)
式中:D為搜索位置維度,S為大小為D×1的(0,1)間隨機(jī)行向量,LF() 為服從Levy飛行分布的函數(shù),計(jì)算方法為

(7)
式中:μ、v為(0,1)間隨機(jī)量,β=1.5。
4)若滿足 |E|<0.5且λ<0.5, 表明獵物能量快耗盡,哈里斯鷹將以漸進(jìn)式快速俯沖硬包圍方式圍捕獵物,該數(shù)學(xué)模型如
Xi(t+1)=

(8)
2.2 多策略混合改進(jìn)哈里斯鷹算法MHIHHO
2.2.1 Fuch無限折疊混沌初始化策略
初始種群的分布對(duì)于算法的尋優(yōu)效率具有很大影響。由于HHO算法對(duì)于最優(yōu)解的所在區(qū)域并無先驗(yàn)知識(shí)可用,故采用了隨機(jī)初始化方法,會(huì)導(dǎo)致個(gè)體分布均勻性差,個(gè)體質(zhì)量下降,影響算法尋優(yōu)速度。混沌系統(tǒng)具有遍歷性、非重復(fù)兼顧了隨機(jī)性的特點(diǎn),有著比完全隨機(jī)分布更均勻的特征。常用的混沌映射系統(tǒng)如Logistic映射、Tent映射和Circle映射等,但這些都屬于有限折疊混沌映射。相比而言,F(xiàn)uch混沌映射是一種可無限折疊的混沌映射方式,其遍歷性、動(dòng)態(tài)隨機(jī)性以及最后的收斂性都要優(yōu)于前面3種混沌映射。故MHIHHO引入Fuch無限折疊混沌方式對(duì)HHO進(jìn)行種群初始化操作,以生成個(gè)體在搜索空間內(nèi)的初始位置信息。Fuch混沌映射公式為
y(k+1)=cos(1/y(t)2)
(9)
式中:y(k)≠0。 生成Fuch混沌值后,混沌值與種群搜索空間的映射規(guī)則為
X(t)=lb+y(t)×(ub-lb)
(10)
式中:[lb,ub] 為個(gè)體搜索邊界,y(t) 為式(9)生成的Fuch混沌值。
圖1是以隨機(jī)初始化和Fuch混沌初始化得到的種群分布。隨機(jī)初始化方式為

圖1 兩種種群初始化分布
X(t)=lb+rand×(ub-lb)
(11)
顯然,隨機(jī)初始化中個(gè)體重疊覆蓋問題較為嚴(yán)重,F(xiàn)uch混沌初始化的均勻性更好,能夠更均勻地對(duì)解空間遍歷。雖然算法對(duì)最優(yōu)解所在區(qū)域并無先驗(yàn)知識(shí),但更均勻的個(gè)體分布將提升算法尋覓最優(yōu)解的搜索效率和穩(wěn)定性。
圖2是在基準(zhǔn)函數(shù)Booth的測(cè)試下,MHIHHO分別利用隨機(jī)初始化、Logistic映射初始化、Circle映射初始化以及Fuch無限折疊混沌初始化策略得到的目標(biāo)函數(shù)收線曲線。Sphere函數(shù)的理論最優(yōu)解為0。算法進(jìn)行500次迭代,搜索區(qū)域內(nèi)布置30個(gè)個(gè)體。觀察4個(gè)曲線,3種混沌映射初始化方法對(duì)函數(shù)的求解精度顯然優(yōu)于隨機(jī)化方法,隨機(jī)初始化在50個(gè)數(shù)據(jù)級(jí)的精度下一直處于平緩,最后收斂,在300次迭代后已經(jīng)無法進(jìn)一步提高收斂精度。3種混沌映射均有不同程度精度提高,但趨勢(shì)各異。隨機(jī)種群初始化在迭代約300次后尋優(yōu)精度已經(jīng)穩(wěn)定,無法進(jìn)一步開辟新空間,提升搜索精度。利用混沌種群初始化可以進(jìn)一步提高搜索精度。所提Fuch無限折疊映射初始迭代初期搜索精度不是最優(yōu),但后期精度迅速提升,得益于該初始化方法能夠使個(gè)體更均勻的分布,遍歷到所有未及區(qū)域,以更高的概率逼近最優(yōu)目標(biāo),提升多樣性。
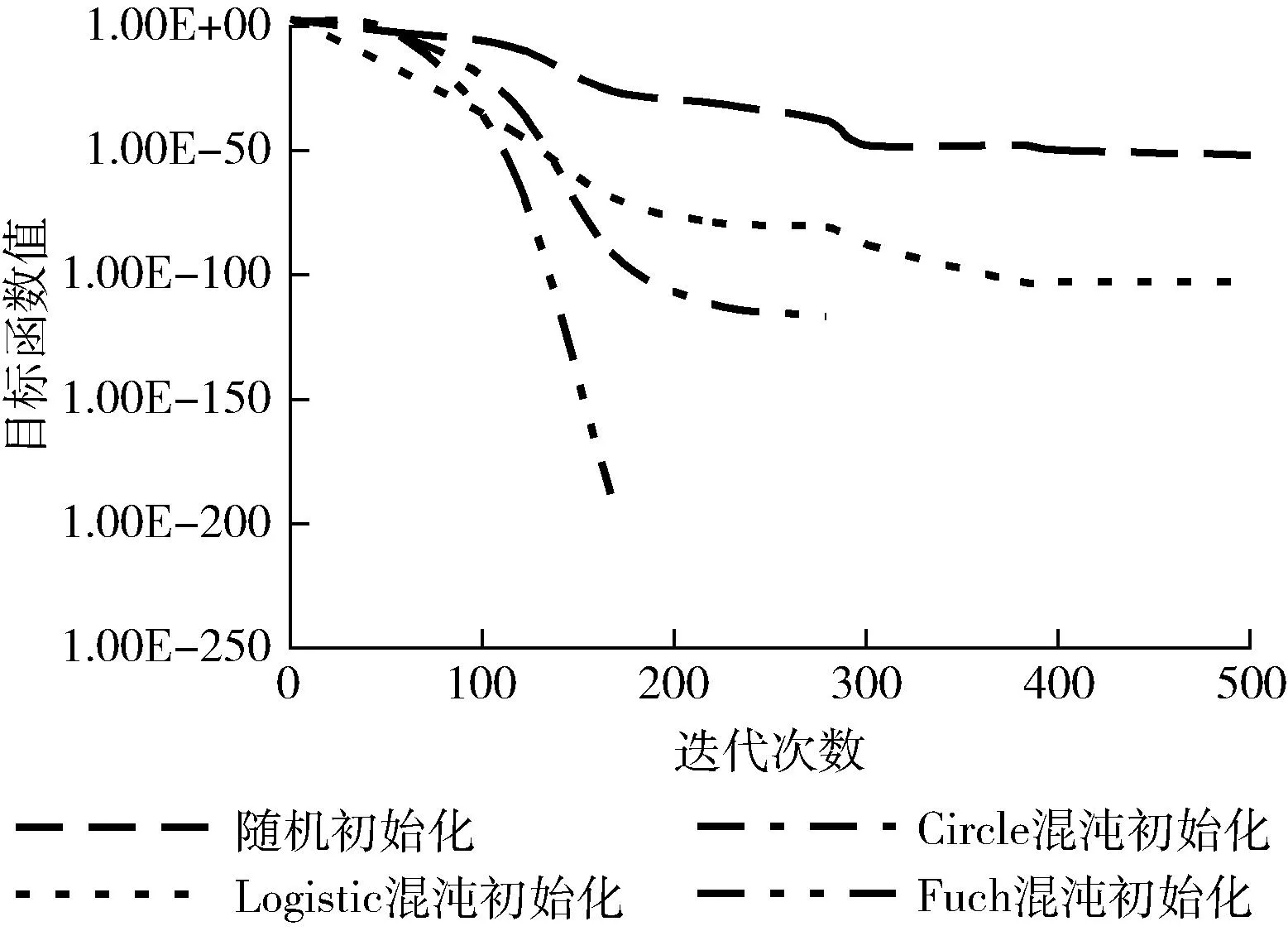
圖2 不同混沌初始化策略對(duì)比
2.2.2 自適應(yīng)精英個(gè)體對(duì)立學(xué)習(xí)策略
研究表明,種群個(gè)體經(jīng)對(duì)立變異后擁有更大的概率靠近最優(yōu)解區(qū)域,種群可行解的質(zhì)量可有效提高。為了擴(kuò)展搜索區(qū)域,提高HHO的全局搜索能力,MHIHHO引入自適應(yīng)精英個(gè)體對(duì)立學(xué)習(xí)策略對(duì)HHO進(jìn)行改進(jìn)。令X表示一個(gè)種群個(gè)體,即問題的一個(gè)可行解,搜索空間范圍為 [lb,ub], 定義個(gè)體X的對(duì)立解X′為
X′=lb+(ub-X)
(12)
若種群所有個(gè)體進(jìn)行對(duì)立學(xué)習(xí),勢(shì)必會(huì)增加算法時(shí)間復(fù)雜度,而若個(gè)體適應(yīng)度較差,其對(duì)立解對(duì)種群搜索方向引導(dǎo)也有不利。此外,HHO通過模擬哈里斯鷹的種群捕食過程,目標(biāo)(食物源)的信息決定了種群個(gè)體位置更新,決定著算法進(jìn)化方向。若目標(biāo)已經(jīng)處于局部最優(yōu),則種群個(gè)體會(huì)向局部極值點(diǎn)靠攏,影響算法尋優(yōu)精度。利用精英個(gè)體組成的種群有利于避免單一個(gè)體在尋優(yōu)中發(fā)生早熟收斂。改進(jìn)算法將進(jìn)一步對(duì)精英個(gè)體進(jìn)行對(duì)立學(xué)習(xí),以自適應(yīng)比例設(shè)置精英個(gè)體數(shù)量,進(jìn)行對(duì)立學(xué)習(xí)。將種群中精英個(gè)體的數(shù)量定義為
(13)
式中:nelite為種群所選精英個(gè)體數(shù)量,N為種群個(gè)體總數(shù),t為算法當(dāng)前迭代次數(shù),Tmax為算法總迭代次數(shù)。根據(jù)式(13),精英個(gè)體的數(shù)量將隨著算法迭代線性遞減。迭代早期,精英個(gè)體數(shù)量較多,可以盡可能發(fā)揮個(gè)體對(duì)立解的優(yōu)勢(shì),得到更多適應(yīng)度較優(yōu)的候選解;迭代后期,精英個(gè)體數(shù)量逐步減少,可以加快算法收斂,降低算法時(shí)間復(fù)雜度。具體過程為:先計(jì)算種群個(gè)體適應(yīng)度,按適應(yīng)度對(duì)個(gè)體進(jìn)行升序排列,選取前nelite個(gè)個(gè)體為精英個(gè)體,計(jì)算精英個(gè)體的對(duì)立解,并利用貪婪選擇策略保留適應(yīng)度較優(yōu)的個(gè)體至下一代種群中。
2.2.3 正余弦優(yōu)化策略
當(dāng)HHO迭代時(shí),個(gè)體搜索維度其實(shí)在變小,即搜索空間逐步壓縮,種群多樣性逐步缺失。為了提升HHO的全局搜索能力,MHIHHO將引入正余弦優(yōu)化機(jī)制SCA[21]對(duì)HHO的局部開發(fā)過程進(jìn)行優(yōu)化。具體針對(duì)MHIHHO中軟/硬包圍時(shí)的跳躍位置更新。
已知正余弦優(yōu)化中粒子個(gè)體的位置更新方式為
xi,j(t+1)=

(14)
式中:xbest,j為全局最優(yōu)解的j維位置,r6為振幅調(diào)節(jié)因子,r7∈[0,2π]、r8∈[-2,2]、r9∈[0,1]均為均勻分布隨機(jī)量。
結(jié)合式(14),將軟/硬包圍階段的跳躍式位置更新方式定義為
X(t+1)=

(15)
式中:r6為振幅調(diào)節(jié)因子,用于均衡全局搜索與局部開發(fā)。若r6值較大,算法可以更大的步長(zhǎng)提升全局搜索能力,而較小的r6值則可以使算法在局部范圍內(nèi)作精細(xì)開發(fā)。為了提高改進(jìn)算法的尋優(yōu)能力,本文結(jié)合指數(shù)函數(shù)將r6的更新改進(jìn)為非線性遞減,定義為
r6(t)=(1+βt)·rmax·e-βt
(16)
式中:β表示曲線調(diào)整參數(shù),rmax表示振幅調(diào)節(jié)系數(shù)的最大值。由此可見,r6將隨迭代非線性從最大值遞減到最小值,更好地在搜索與開發(fā)間進(jìn)行轉(zhuǎn)換。
慣性權(quán)重w(t) 的思想源于粒子群算法,MHIHHO進(jìn)一步引入該因子在迭代前期以更大權(quán)重值增強(qiáng)個(gè)體位置對(duì)種群的影響,迭代后期以更小權(quán)重值增強(qiáng)最優(yōu)個(gè)體引導(dǎo),具體為
(17)
式中:k為調(diào)整系數(shù),wmax、wmin分別是權(quán)重最大值和最小值。
2.2.4 高斯與拉普拉斯最優(yōu)個(gè)體變異策略
HHO算法的位置更新公式表明,隨著迭代進(jìn)化,種群搜索將向著最優(yōu)解移動(dòng),逐步聚集于最優(yōu)解鄰域,這可能導(dǎo)致因多樣性缺失帶來的局部最優(yōu)解。為此,MHIHHO引入一種針對(duì)種群最優(yōu)解的混合變異策略,使得搜索個(gè)體具有跳離局部最優(yōu)、擴(kuò)展搜索空間的能力。混合變異策略由高斯變異和拉普拉斯變異機(jī)制構(gòu)成。
已知高斯分布的概率密度函數(shù)為
(18)
拉普拉斯分布的概率密度函數(shù)為
(19)
式中:m為高斯分布均值,n為變量;a∈(-∞,+∞), 表示位置,b為比例參數(shù),且b>0。
利用式(20)的分布函數(shù)定義拉普拉斯分布L(a,b), 該函數(shù)關(guān)于位置參數(shù)a對(duì)稱分布
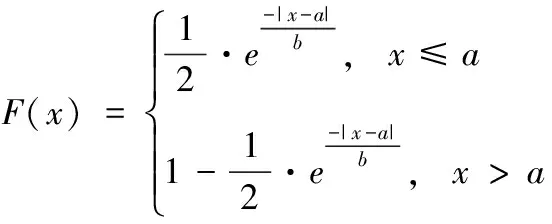
(20)
為了充分利用搜索空間的隨機(jī)性,增強(qiáng)種群多樣性,設(shè)拉普拉斯分布L(a,b) 中a=1,b=2。高斯分布G(m,n) 中m=0,n=1。將針對(duì)種群最優(yōu)解Xrabbit的混合變異方式定義為
Xrabbit(t+1)=(η1·L(1,2)+η2·G(0,1)+1)·Xrabbit(t)
(21)
(22)
拉普拉斯分布L(1,2) 擁有比高斯分布G(0,1) 更大的波動(dòng)。而兩個(gè)系數(shù)η1和η2均是迭代t的指數(shù)函數(shù),根據(jù)式(22),系數(shù)η1迭代早期更大,有利于拓展搜索空間;迭代后期,η1漸漸減小,收斂加快。同時(shí),系數(shù)η2不斷增加,高斯系數(shù)G(0,1) 此時(shí)利于精細(xì)開采,提高局部開發(fā)能力。
3 基于MHIHHO的WSN節(jié)點(diǎn)覆蓋優(yōu)化模型
3.1 覆蓋模型
將WSN節(jié)點(diǎn)部署于矩形區(qū)域,節(jié)點(diǎn)部署后不具備移動(dòng)性,且節(jié)點(diǎn)均為同質(zhì)結(jié)構(gòu)。WSN節(jié)點(diǎn)具備感知能力,能夠發(fā)現(xiàn)其通信半徑內(nèi)其它WSN節(jié)點(diǎn)。現(xiàn)令部署區(qū)域大小為S=L×M,可將其視為L(zhǎng)×M的網(wǎng)格,單個(gè)網(wǎng)格大小為1。WSN節(jié)點(diǎn)部署數(shù)量為V,表示為集合Z={Z1,Z2,…,ZV}, 所有節(jié)點(diǎn)為同質(zhì)結(jié)構(gòu),具有相同的感知半徑r和通信半徑R,通常r≤2R。令 {xi,yi} 為節(jié)點(diǎn)Zi的坐標(biāo)位置,i=1,2,…,V。
令點(diǎn)oj坐標(biāo)為 {xj,yj}, 以歐氏距離度量方式計(jì)算傳感節(jié)點(diǎn)Zi與oj的距離為
(23)
若d(Zi,oj)≤r, 則oj被Zi覆蓋。定義oj被Zi感知的概率為

(24)
為了提升監(jiān)測(cè)區(qū)域內(nèi)的感知概率,多個(gè)WSN節(jié)點(diǎn)可以協(xié)同進(jìn)行感知。則點(diǎn)oj的聯(lián)合感知概率為
(25)
則監(jiān)測(cè)區(qū)域的覆蓋率即為所有WSN節(jié)點(diǎn)覆蓋的目標(biāo)點(diǎn)數(shù)量與區(qū)域內(nèi)總目標(biāo)點(diǎn)數(shù)量的比值,定義為
(26)
3.2 利用MHIHHO算法求解WSN節(jié)點(diǎn)覆蓋問題
算法優(yōu)化目標(biāo)是:利用若干數(shù)量WSN節(jié)點(diǎn)部署于監(jiān)測(cè)區(qū)域S,求解節(jié)點(diǎn)部署最優(yōu)位置,使目標(biāo)區(qū)域的覆蓋率Pcov達(dá)到最大化。此時(shí),覆蓋優(yōu)化問題可視為目標(biāo)函數(shù)的搜索問題,算法的最優(yōu)解為各WSN節(jié)點(diǎn)的部署位置,而哈里斯鷹個(gè)體的位置則為WSN節(jié)點(diǎn)的覆蓋分布。對(duì)于一個(gè)搜索哈里斯鷹個(gè)體,其2d-1維位置為節(jié)點(diǎn)d的橫坐標(biāo),2d維位置則為節(jié)點(diǎn)d的縱坐標(biāo)。具體步驟如下:
輸入:區(qū)域大小L×M、傳感節(jié)點(diǎn)數(shù)V、感知半徑r;種群規(guī)模n、迭代總數(shù)Tmax、搜索范圍 [lb,ub]、rmax、 系數(shù)k、權(quán)重值wmax和wmin;
輸出:WSN節(jié)點(diǎn)部署位置及最優(yōu)覆蓋率Pcov;
步驟1 輸入MHIHHO算法參數(shù)和WSN參數(shù);
步驟2 在搜索空間內(nèi)利用Fuch無限折疊混沌策略初始化哈里斯鷹種群;
步驟3 令當(dāng)前迭代t=1;
步驟4 執(zhí)行自適應(yīng)精英個(gè)體對(duì)立學(xué)習(xí)策略;并計(jì)算個(gè)體適應(yīng)度,確定當(dāng)前最優(yōu)解;
步驟5 根據(jù)式(1)更新獵物逃逸能量系數(shù)E;
步驟6 若 |E|≥1且q≥0.5, 根據(jù)式(2)中的第1個(gè)公式更新個(gè)體位置;若 |E|≥1且q<0.5,利用式(2)中的第2個(gè)公式更新個(gè)體位置;
步驟7 若 |E|≥0.5且λ≥0.5, 根據(jù)式(15)的正余弦優(yōu)化策略更新個(gè)體位置;
步驟8 若 |E|≥0.5且λ<0.5, 利用式(6)更新個(gè)體位置;
步驟9 若 |E|<0.5且λ≥0.5, 先利用式(5)更新個(gè)體位置;
步驟10 若 |E|<0.5且λ<0.5, 根據(jù)式(15)的正余弦優(yōu)化策略更新個(gè)體位置;
步驟11 返回種群更新后的位置,并更新最優(yōu)解;利用式(21)柯西和拉普拉斯分布對(duì)最優(yōu)解進(jìn)行變異,并擇優(yōu)保留;
步驟12 更新迭代t=t+1;
步驟13 判斷終止條件,若未終止則返回步驟4;否則,輸出最優(yōu)解,即:對(duì)應(yīng)的WSN節(jié)點(diǎn)部署的位置坐標(biāo)及最優(yōu)覆蓋率Pcov。
圖3是MHIHHO求解覆蓋優(yōu)化問題的流程。
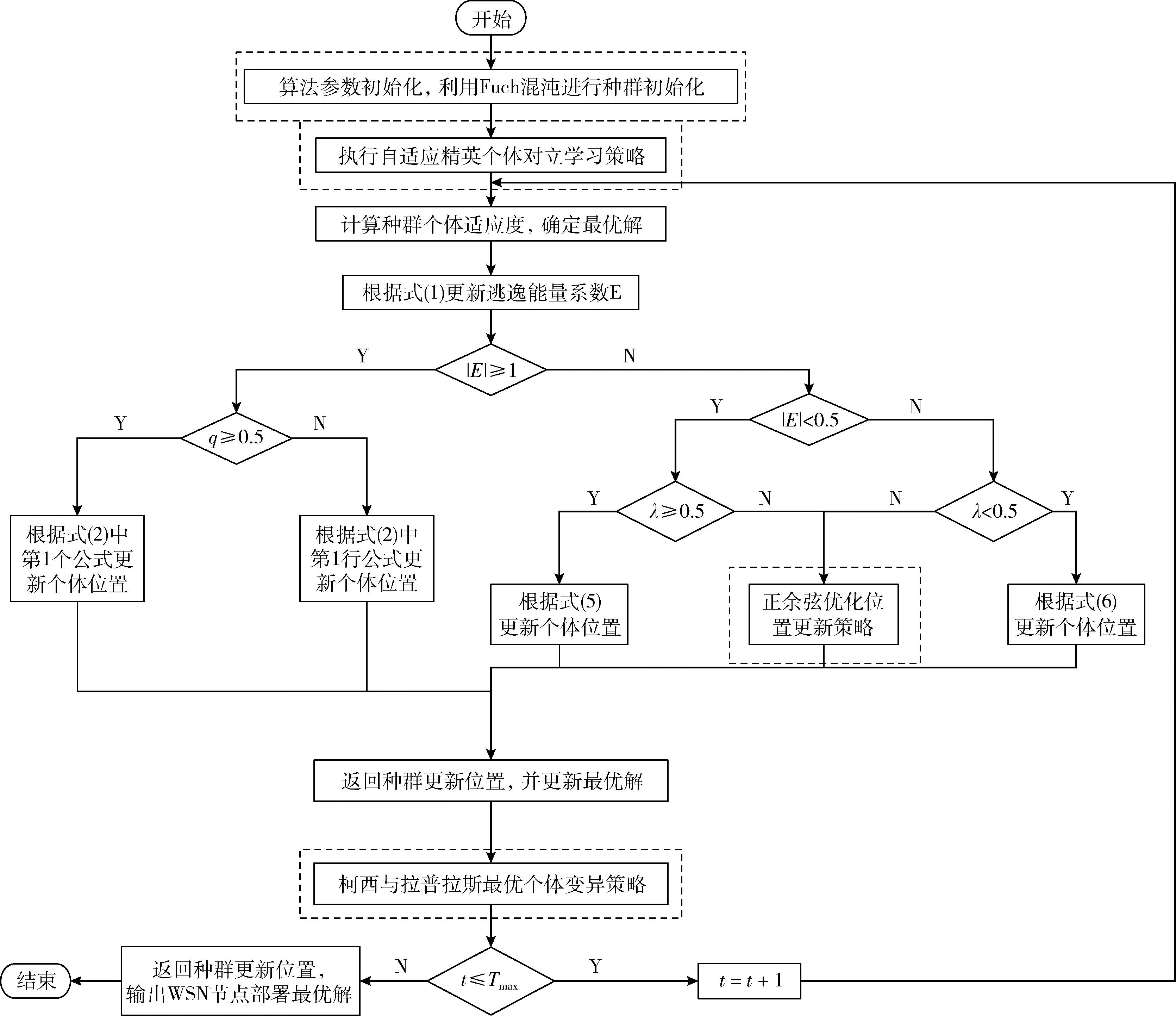
圖3 MHIHHO算法求解流程
4 仿真實(shí)驗(yàn)
4.1 基準(zhǔn)函數(shù)尋優(yōu)實(shí)驗(yàn)
為了驗(yàn)證MHIHHO的有效性,先利用6個(gè)基準(zhǔn)函數(shù)式進(jìn)行目標(biāo)函數(shù)的尋優(yōu)實(shí)驗(yàn),表1是基準(zhǔn)函數(shù)相關(guān)屬性。表中,基準(zhǔn)函數(shù)f(x) 即為尋找最優(yōu)解的目標(biāo)函數(shù),搜索范圍為種群個(gè)體的活動(dòng)空間,fmin為函數(shù)理論可達(dá)的最優(yōu)值。同時(shí),在表1中,函數(shù)f1(x)~f3(x) 為單峰函數(shù)類型,f4(x)~f6(x) 為多峰函數(shù)類型。為了兼顧公平性,算法獨(dú)立運(yùn)行20次,并計(jì)算其適應(yīng)度均值、標(biāo)準(zhǔn)方差、最優(yōu)值。算法的種群規(guī)模n=30,搜索維度d=20,迭代總次數(shù)Tmax=500,振幅調(diào)節(jié)系數(shù)最大值rmax=2,調(diào)整系數(shù)k=2,權(quán)重最大值wmax=0.9,wmin=0.3。仿真平臺(tái)為Matlab2019a。選擇標(biāo)準(zhǔn)哈里斯鷹優(yōu)化算法HHO[4]、改進(jìn)灰狼優(yōu)化算法IGWO[12]和改進(jìn)哈里斯鷹優(yōu)化算法QRHHO[16]與本文的MHIHHO同時(shí)作縱橫向?qū)Ρ确治觥?/p>
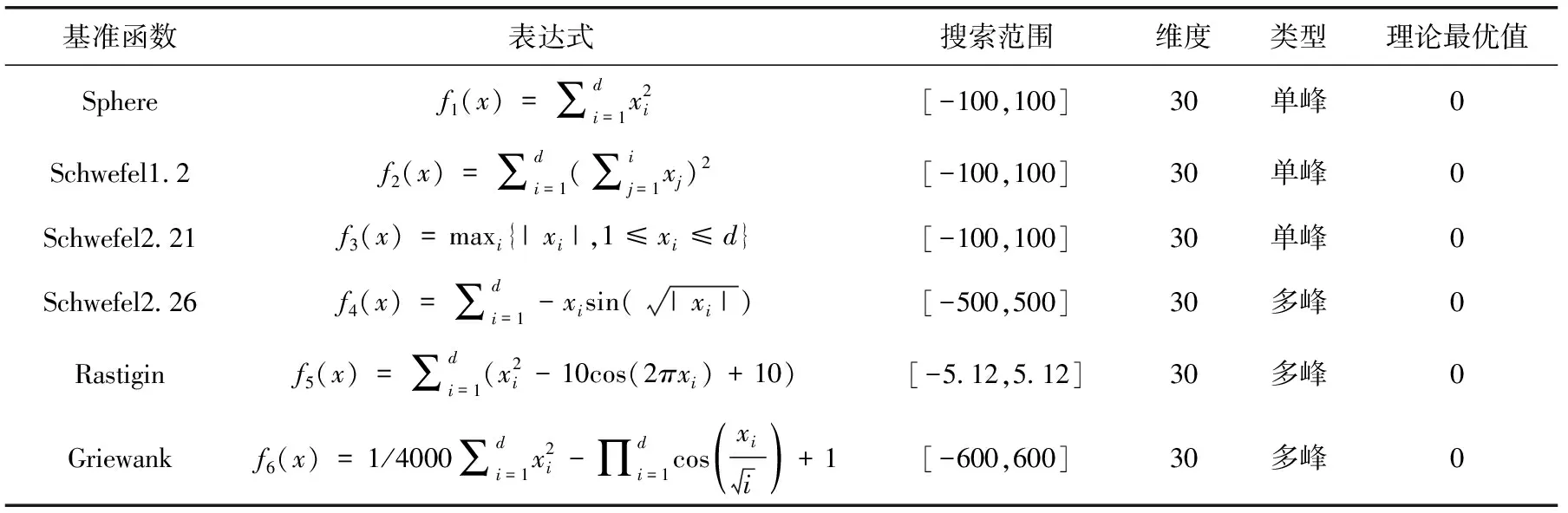
表1 基準(zhǔn)函數(shù)說明
(1)尋優(yōu)精度對(duì)比。表2是各算法在基準(zhǔn)函數(shù)上的尋優(yōu)結(jié)果。可以看出,MHIHHO在6個(gè)基準(zhǔn)函數(shù)中的4個(gè)可以取得理論最優(yōu)值,尋優(yōu)成功率達(dá)到66.7%,未取得理論最優(yōu)值的Schwefel2.21和Schwefel2.26中依然得到了最高的求解精度。而得到了更小的標(biāo)準(zhǔn)方差值,則表明MHIHHO具有更好的穩(wěn)定性和魯棒性。相比HHO,MHIHHO在求解精度上平均可以提高約4個(gè)數(shù)量級(jí),與另外兩種改進(jìn)的群體智能算法QRHHO和IGWO相比也有較大程度的求解精度提高,說明MHIHHO所引入針對(duì)HHO的不同進(jìn)化階段所做的改進(jìn)工作對(duì)標(biāo)準(zhǔn)HHO中的搜索與開發(fā)的均衡、提升收斂速度和尋優(yōu)精度的改進(jìn)是切實(shí)有效可行的。

表2 算法尋優(yōu)結(jié)果
(2)收斂性對(duì)比。圖4進(jìn)一步選取兩個(gè)單峰基準(zhǔn)函數(shù)f2(x)、f3(x) 和兩個(gè)多峰基準(zhǔn)函數(shù)f5(x)、f6(x) 共4個(gè)基準(zhǔn)函數(shù)測(cè)試算法的尋優(yōu)收斂曲線。觀察曲線趨勢(shì),MHIHHO在4個(gè)基準(zhǔn)函數(shù)上都表現(xiàn)出更快的收斂速度,在f2(x)、f3(x)、f5(x)、f6(x) 上都得到了很好的性能表現(xiàn),

圖4 收斂曲線
其產(chǎn)生收斂的迭代次數(shù)也是最少的。尤其在兩個(gè)多峰函數(shù)上,由于具有多個(gè)極值點(diǎn),波峰不定,算法的搜索過程容易到達(dá)局部最優(yōu)而無法進(jìn)化。MHIHHO通過引入基于混合柯西與拉普拉斯變異的動(dòng)態(tài)擾動(dòng)機(jī)制能夠使算法具備跳離局部最優(yōu)的能力,提高多峰函數(shù)中的尋優(yōu)性能。
(3)種群分布對(duì)比。選取基準(zhǔn)函數(shù)Schwefel2.21進(jìn)行實(shí)驗(yàn),觀察算法在迭代100次、200次和400次時(shí)種群個(gè)體在搜索空間內(nèi)的分布,種群規(guī)模設(shè)為30。如圖5是不同時(shí)期算法種群個(gè)體的分布圖。HHO和IGWO在3個(gè)不同的迭代時(shí)期中,個(gè)體在搜索空間內(nèi)一直處于比較分散的狀態(tài)。迭代后期,甚至一些個(gè)體離最優(yōu)解區(qū)域依然相隔較遠(yuǎn),已經(jīng)陷入局部最優(yōu)而無法脫離,這表明算法本身搜索性能還有待提升。相比而言,改進(jìn)算法QRHHO全局收斂性能更好,迭代后期一些個(gè)體已經(jīng)聚集在最優(yōu)解區(qū)域,表明算法中采用的偽反射學(xué)習(xí)機(jī)制使HHO種群實(shí)現(xiàn)了一定的信息交互,提升了算法搜索精度。MHIHHO總體上在迭代前、中、后期具備更好的分布,前期比較分散,保證種群多樣性,中期逐步聚集于最優(yōu)解附近,后期多數(shù)個(gè)體已經(jīng)逐步收斂于最優(yōu)解或鄰近區(qū)域。MHIHHO通過混合多策略改進(jìn)思路對(duì)HHO的改進(jìn)是行之有效的。

圖5 種群個(gè)體分布
4.2 WSN節(jié)點(diǎn)覆蓋優(yōu)化實(shí)驗(yàn)
令監(jiān)測(cè)區(qū)域大小S=100 m×100 m, 部署的WSN傳感節(jié)點(diǎn)總數(shù)V=30,節(jié)點(diǎn)感知半徑r=12 m,通信半徑R=24 m。仿真平臺(tái)為Matlab2019a。選擇標(biāo)準(zhǔn)哈里斯鷹優(yōu)化算法HHO[4]、改進(jìn)灰狼優(yōu)化算法IGWO[12]、改進(jìn)哈里斯鷹優(yōu)化算法QRHHO[16]與本文的MHIHHO算法進(jìn)行性能比較。
(1)WSN節(jié)點(diǎn)分布對(duì)比。圖6為分別利用HHO算法、IGWO算法、QRHHO算法和MHIHHO算法求解WSN節(jié)點(diǎn)部署位置后得到的區(qū)域覆蓋優(yōu)化情況,圖中黑實(shí)心點(diǎn)代表一個(gè)傳感器節(jié)點(diǎn)的部署坐標(biāo),而圓形弧線區(qū)域則代表相應(yīng)傳感器節(jié)點(diǎn)所覆蓋的范圍,數(shù)字為傳感器節(jié)點(diǎn)的編號(hào)。可以看到,HHO算法得到的節(jié)點(diǎn)部署結(jié)果中,節(jié)點(diǎn)分布均勻性較差,存在多個(gè)覆蓋盲區(qū),而部分區(qū)域又存在節(jié)點(diǎn)密度過高、覆蓋重復(fù)和冗余較大的問題,說明其尋優(yōu)性能還有待改進(jìn)。IGWO算法經(jīng)過節(jié)點(diǎn)位置和使用節(jié)點(diǎn)數(shù)量的優(yōu)化后,區(qū)域覆蓋更加均勻,明顯減少了高密度節(jié)點(diǎn)覆蓋區(qū)域,區(qū)域覆蓋率有所提高,但依然存在一些覆蓋空洞。利用本文的MHIHHO算法進(jìn)行節(jié)點(diǎn)覆蓋優(yōu)化后,節(jié)點(diǎn)分布更加均勻,節(jié)點(diǎn)使用數(shù)量又進(jìn)一步降低,幾乎不產(chǎn)生任何冗余節(jié)點(diǎn)和高密度重復(fù)覆蓋區(qū)域,覆蓋率接近于100%。

圖6 傳感節(jié)點(diǎn)部署
(2)WSN節(jié)點(diǎn)組網(wǎng)拓?fù)鋵?duì)比。基于圖6所得的WSN節(jié)點(diǎn)分布,利用普里姆算法構(gòu)建最小生成樹,結(jié)果如圖7所示。在節(jié)點(diǎn)通信距離均勻性上,MHIHHO優(yōu)于對(duì)比算法。同時(shí),在MHIHHO所構(gòu)建的WSN通信網(wǎng)絡(luò)中,承接數(shù)據(jù)聚合的匯聚節(jié)點(diǎn)能夠更好地分布在區(qū)域邊緣,避免了中心位置,這樣避免了長(zhǎng)距離數(shù)據(jù)傳輸,降低了遠(yuǎn)距離數(shù)據(jù)傳送的能耗。綜合來看,智能優(yōu)化算法能夠一定程度上以提高網(wǎng)絡(luò)覆蓋率為目標(biāo)優(yōu)化節(jié)點(diǎn)的位置,但MHIHHO的平均通信距離分布更加均勻,匯聚節(jié)點(diǎn)分布更佳。

圖7 WSN節(jié)點(diǎn)組網(wǎng)
(3)覆蓋率對(duì)比。圖8是算法迭代過程中,覆蓋率的變化收斂曲線。可以看到,首先,從迭代完成后的最終區(qū)域覆蓋率上講,MHIHHO算法的覆蓋率接近于100%,是4種算法中最高。QRHHO算法、IGWO算法和HHO算法的覆蓋率分別達(dá)到93.6%、91.8%和83.2%,之所以無法進(jìn)一步提高覆蓋率,在于此時(shí)算法在求解最佳節(jié)點(diǎn)部署位置時(shí)已經(jīng)得到局部最優(yōu)解,該結(jié)果也驗(yàn)證MHIHHO算法在求解精度上得到有效提升。同時(shí),從得到相同覆蓋率所使用的迭代次數(shù)上看,MHIHHO明顯使用了更少的迭代次數(shù),說明算法的進(jìn)化速度更快,在相同條件下,能夠以相同數(shù)量節(jié)點(diǎn)得到更高的區(qū)域覆蓋率,節(jié)點(diǎn)部署位置更精確。圖9展示W(wǎng)SN節(jié)點(diǎn)部署數(shù)量對(duì)覆蓋率的影響。隨著部署節(jié)點(diǎn)數(shù)量的增加,區(qū)域覆蓋率都有所增加,但從覆蓋率增漲速度上看,MHIHHO算法明顯更快,并且在相同部署數(shù)量下,該算法的覆蓋率也是最高的。此外,當(dāng)部署節(jié)點(diǎn)較少時(shí),在相對(duì)廣闊的監(jiān)測(cè)區(qū)域內(nèi),較少節(jié)點(diǎn)幾乎不存在交叉覆蓋區(qū)域,所有4種算法的覆蓋率比較接近。但增加節(jié)點(diǎn)數(shù)量后,MHIHHO算法的覆蓋率明顯增加的更快,在160個(gè)節(jié)點(diǎn)數(shù)時(shí),已經(jīng)接近于完全覆蓋,說明算法不僅求解精度更高,而且收斂速度更快,可更少部署節(jié)點(diǎn)數(shù)得到更高的區(qū)域覆蓋率。

圖8 覆蓋率隨迭代變化
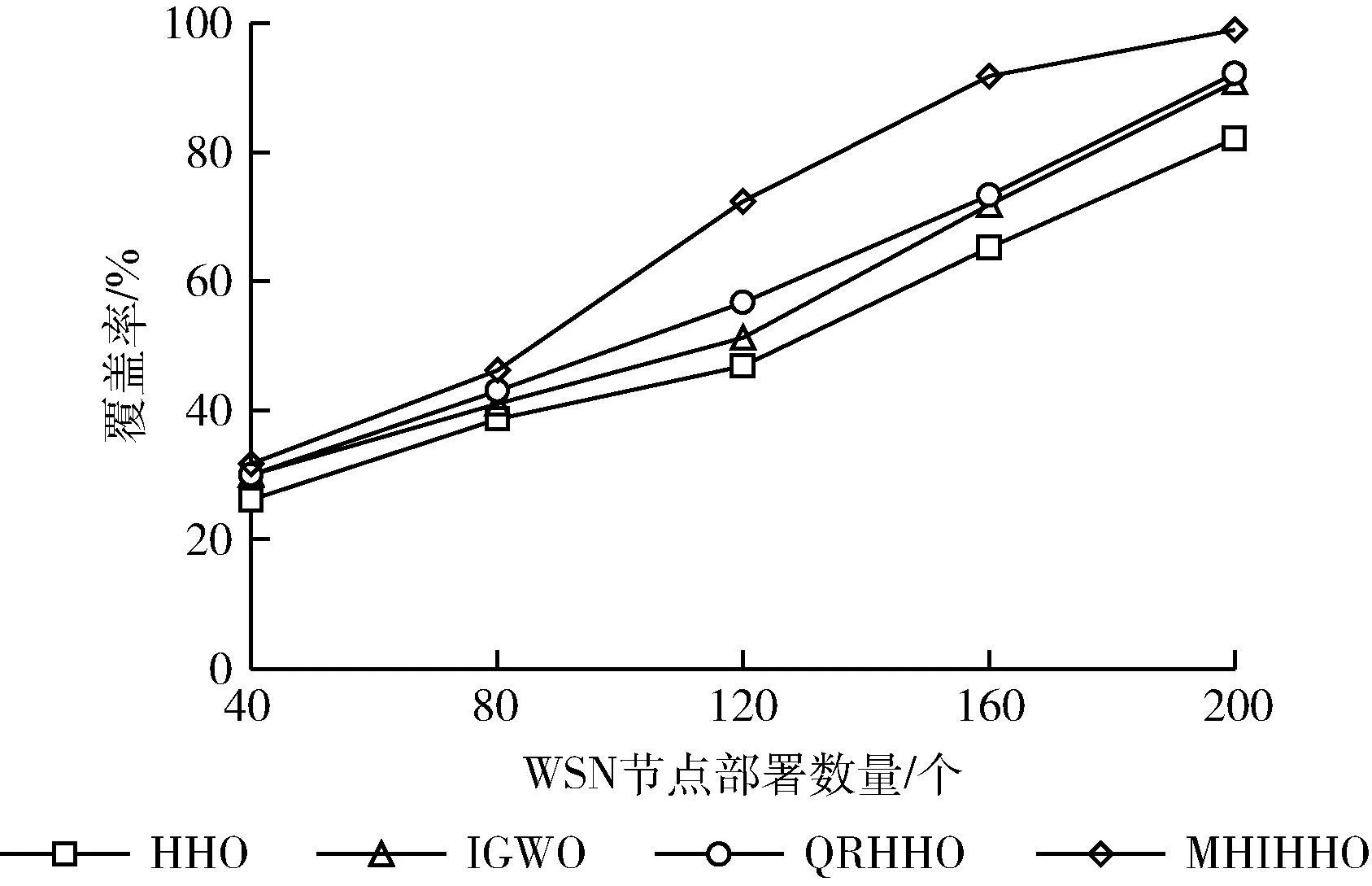
圖9 部署節(jié)點(diǎn)數(shù)量對(duì)覆蓋率的影響
(4)WSN生存時(shí)間對(duì)比。圖10是利用Leach作為組網(wǎng)協(xié)議,網(wǎng)絡(luò)工作后節(jié)點(diǎn)數(shù)量的變化情況。節(jié)點(diǎn)初始能量為0.5 J,采用常規(guī)能耗模型計(jì)算能耗[22]。由結(jié)果可知,MHIHHO算法的節(jié)點(diǎn)死亡慢于HHO算法、IGWO算法和QRHHO算法,若節(jié)點(diǎn)分布均勻性差,會(huì)導(dǎo)致冗余節(jié)點(diǎn)多,從而加快能耗。而未覆蓋區(qū)域數(shù)據(jù)中繼傳輸過多同樣會(huì)加快節(jié)點(diǎn)能耗。MHIHHO的數(shù)據(jù)傳輸距離均勻,遠(yuǎn)距離傳輸和近距離的冗余傳輸更少,節(jié)點(diǎn)工作時(shí)間更長(zhǎng),可以延長(zhǎng)網(wǎng)絡(luò)生存時(shí)間。

圖10 網(wǎng)絡(luò)生存時(shí)間
表3是覆蓋所有目標(biāo)點(diǎn)時(shí)不同算法所需要的節(jié)點(diǎn)數(shù)的比較情況。仍然以30個(gè)傳感節(jié)點(diǎn)進(jìn)行部署,在完成相同覆蓋率的情況下,對(duì)比各算法所使用的節(jié)點(diǎn)數(shù)量情況。從結(jié)果中可以看到,在完成相同區(qū)域覆蓋率的情況下,MHIHHO算法能夠以更少數(shù)量的傳感器節(jié)點(diǎn)進(jìn)行部署,說明算法所利用的對(duì)節(jié)點(diǎn)位置的搜索機(jī)制能夠得到最佳的坐標(biāo),盡可能地減少了交叉覆蓋的情況。對(duì)比算法由于存在對(duì)區(qū)域的冗余覆蓋,導(dǎo)致相同數(shù)據(jù)的節(jié)點(diǎn)部署下得到的覆蓋率相對(duì)較低。綜合說明改進(jìn)算法能夠求解到最優(yōu)的節(jié)點(diǎn)部署位置,以更少的部署節(jié)點(diǎn)得到更高的區(qū)域覆蓋率。
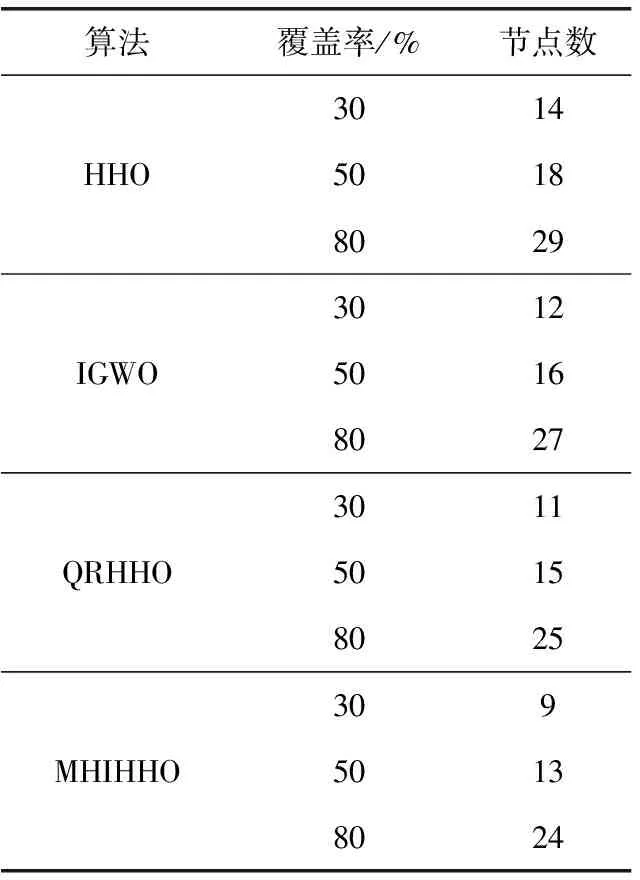
表3 節(jié)點(diǎn)使用數(shù)量對(duì)比
MHIHHO算法時(shí)間復(fù)雜度分析。令種群規(guī)模為n,搜索維度為d,算法迭代總次數(shù)為Tmax。種群初始化階段的時(shí)間復(fù)雜度為O(nd), 執(zhí)行精英個(gè)體對(duì)立學(xué)習(xí)過程的最大時(shí)間復(fù)雜度為O(nd)。 接著算法需要以4種不同的方式更新個(gè)體位置,且該過程需要迭代Tmax次。該過程的時(shí)間復(fù)雜度為O(ndTmax)。 個(gè)體變異時(shí)間復(fù)雜度為O(ndTmax)。 則MHIHHO時(shí)間復(fù)雜度為O(nd+nd+ndTmax+ndTmax)=O(ndTmax)。
5 結(jié)束語
本文提出一種多策略混合改進(jìn)哈里斯鷹算法的WSN節(jié)點(diǎn)覆蓋優(yōu)化算法。首先,為了提高標(biāo)準(zhǔn)哈里斯鷹算法HHO的尋優(yōu)性能,引入Fuch無限折疊混沌初始化、自適應(yīng)精英個(gè)體對(duì)立學(xué)習(xí)、正余弦優(yōu)化、柯西/拉普拉斯變異對(duì)算法進(jìn)行改進(jìn)。應(yīng)用改進(jìn)算法求解WSN節(jié)點(diǎn)覆蓋優(yōu)化,以覆蓋率最大為目標(biāo),求解節(jié)點(diǎn)最佳位置。結(jié)果表明,改進(jìn)算法實(shí)現(xiàn)了預(yù)期結(jié)果,能夠優(yōu)化網(wǎng)絡(luò)覆蓋率。未來研究方向可進(jìn)一步改善哈里斯鷹算法的全局搜索能力,在尋優(yōu)廣度和精度做一些改進(jìn),從而達(dá)到覆蓋率的最大提升。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
電測(cè)與儀表(2015年5期)2015-04-09 11:30:52
