石油鉆井平臺裝備電動化進程及趨勢
2024-02-22 05:19:30孟祥卿
石油機械 2024年2期
孟 祥 卿
(中石化勝利石油工程有限公司)
0 引 言
在千行百業(yè)數(shù)字化轉(zhuǎn)型的巨大需求牽引之下,全球機器人行業(yè)創(chuàng)新機構(gòu)與企業(yè)圍繞技術(shù)研發(fā)和場景開發(fā)不斷探索,在汽車制造、電子制造、倉儲運輸、醫(yī)療康復(fù)、應(yīng)急救援等領(lǐng)域的應(yīng)用不斷深入拓展,推動機器人產(chǎn)業(yè)持續(xù)蓬勃發(fā)展。2017—2022年機器人的年均增長率達到14%。
在油氣能源領(lǐng)域,勘探開發(fā)作業(yè)大多位于野外環(huán)境,連續(xù)露天作業(yè),人員勞動強度大、作業(yè)風(fēng)險系數(shù)高、工作重復(fù)性強;油氣場站、煉化等行業(yè)屬高風(fēng)險作業(yè)區(qū),其設(shè)備需定期巡檢,同樣存在勞動強度大、重復(fù)性強的特性,此類工作多年以來以人力為主。近10年來,隨著工業(yè)自動化技術(shù)的不斷發(fā)展與進步,信息化、智能化技術(shù)迅猛發(fā)展,也帶動該領(lǐng)域進行了大幅技術(shù)升級。在油氣鉆采裝備方面,動力貓道、鐵鉆工等自動化裝備得到廣泛應(yīng)用,解放了現(xiàn)場若干人力作業(yè)[1-6],受到一線員工的青睞;煉化企業(yè)等引入了自動化儀表、巡檢設(shè)備等替代了人工抄表作業(yè)。
筆者針對油氣領(lǐng)域關(guān)鍵機器人技術(shù)及其應(yīng)用進行論述及對標(biāo)分析,結(jié)合國內(nèi)外發(fā)展趨勢給出行業(yè)發(fā)展建議。
1 國外技術(shù)現(xiàn)狀
1.1 Canrig電動管柱自動化系統(tǒng)
美國Canrig公司于2016年開始研發(fā)全電動管柱自動化系統(tǒng),該系統(tǒng)主要由鉆臺機器人、排管機器人、電動鐵鉆工、輸管機器人4套設(shè)備組成,于2019年開始在海洋、陸地鉆井平臺測試應(yīng)用了13臺(套)[7]。4套設(shè)備既可單獨使用,也可組成一套聯(lián)動系統(tǒng)。
1.1.1 鉆臺機器人
鉆臺機器人安裝于鉆臺面(見圖1),可處理井口短節(jié)、工具等,替代人工作業(yè)。最大載荷16 kN,控制精度達到毫米級,可安裝的功能附件包括動力夾持鉗(短節(jié)、扶正器等的抓持和旋扣)、安全卡瓦、對扣裝置、鉆井液收集盒、螺紋清潔和涂油裝置等(見圖2)。
為了實現(xiàn)自主作業(yè),鉆臺機器人在運行時接收來自其他設(shè)備的狀態(tài)數(shù)據(jù),對自身進行調(diào)優(yōu)。動態(tài)控制系統(tǒng)可在4~10 ms內(nèi)完成計算與決策指令下發(fā)。在北海地區(qū)的半潛式鉆井平臺進行了5個月的應(yīng)用測試,累計運行超過10 000次,處理了22種短節(jié)。該裝置作業(yè)與人工作業(yè)的效果對比如表1所列,主要作業(yè)效率均高于人工,個別作業(yè)時效與人工持平。

圖1 鉆臺機器人作業(yè)實況Fig.1 Real operation of drill floor robot

圖2 扶管機器人多種功能鉗頭Fig.2 Multi-function tong head of pipe help robot
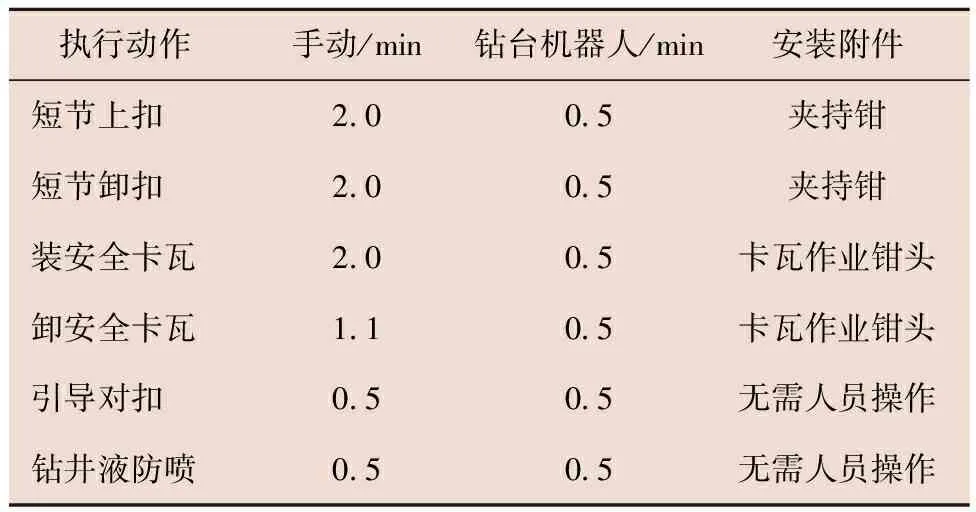
表1 鉆臺面輔助作業(yè)效率對比Table 1 Comparison of auxiliary operations on derrick floor
鉆臺機器人主要特點為:①實現(xiàn)了井口處理短節(jié)的無人化作業(yè);②設(shè)備具有防碰互鎖功能,避免作業(yè)過程中與其他設(shè)備的碰撞;③具有軌跡規(guī)劃功能,自動到達指定的目標(biāo)位置;④滿足防腐、防護、防爆等現(xiàn)場作業(yè)規(guī)范要求。
1.1.2 排管機器人
排管機器人可在地面水平位置起升超單鉆桿、套管或鉆具組合,然后翻轉(zhuǎn)管柱到垂直和旋轉(zhuǎn)管柱到豎立狀態(tài),如圖3所示。配有2種鉗頭:一種最大處理至?346.1 mm(13in)套管,另一種最大處理至?508.0 mm(20 in)套管。該裝置的優(yōu)點是:①作業(yè)過程快速,無需手動操作;②多設(shè)備并行自動運行,節(jié)省循環(huán)作業(yè)時間,理論起下鉆時效1 096 m/h。該設(shè)備于2017年開始在美國的陸地鉆機進行了為期2 a的工業(yè)性試驗,其中單次最長連續(xù)無故障工作時間250 h。裝置于2021年8月開始在美國的二疊紀(jì)盆地進行正常鉆井作業(yè),首周起下鉆、下套管處理管柱累計超過1 500 m。
測試結(jié)果表明,自動化程序控制的一個作業(yè)循環(huán)周期為45 s,超級單根起下鉆時效可達1 100 m/h。工業(yè)性試驗數(shù)據(jù)與人工作業(yè)對比如表2所示,結(jié)合鉆井工藝要求,實際作業(yè)時效為900 m/h。而人員作業(yè)時包含交接等停、人員反應(yīng)時間、體能消耗等實際情況,超級單根作業(yè)時效為580 m/h,三立根作業(yè)時效為780 m/h。由此可知,排管機器人作業(yè)時效均高于人工作業(yè)平均時效。排管機器人下套管理論作業(yè)時效為14根/h(暫未開展實際應(yīng)用測試),滿足鉆井工藝要求。

表2 排管機器人與常規(guī)人工作業(yè)時效對比Table 2 Comparison of time efficiency of pipe racking robot and conventional manual operation

圖3 排管機器人Fig.3 Pipe racking robot
排管機器人主要特點為:①自動實現(xiàn)管柱在水平與垂直、場地與鉆臺面之間的轉(zhuǎn)移,自動定位精準(zhǔn),提高上卸扣效率;②作業(yè)過程無需鼠洞配合;③設(shè)備具有防碰互鎖功能,避免作業(yè)過程中與其他設(shè)備的碰撞。
1.1.3 電動鐵鉆工
電動鐵鉆工的優(yōu)勢為:①上卸扣扭矩控制精準(zhǔn),且最大扭矩達到250 kN·m;②緊扣鉗最大旋轉(zhuǎn)角度180°;③適應(yīng)最大管具直徑346.1 mm(13in),無需單獨配套套管鉗。經(jīng)過9 200次上卸扣測試,系統(tǒng)通過驅(qū)動電動機能夠精確地記錄上卸扣扭矩曲線,一次緊扣即可達到設(shè)定扭矩。
電動鐵鉆工主要特點為:①所施加的扭矩準(zhǔn)確,扭矩分布均勻;②能夠記錄扭矩變化曲線;③旋扣鉗可選裝(與鉆臺機器人和排管機器人配合使用時無需安裝旋扣鉗);④不需要套管大鉗和單獨的套管作業(yè)人員。
1.1.4 輸管機器人
為實現(xiàn)管柱處理全流程自動化,管柱水平、垂直轉(zhuǎn)移的裝備必不可少。輸管機器人用于將管柱由堆場抓取,自動旋轉(zhuǎn)輸送至井口中心位置,替代了傳統(tǒng)行吊、輸送機、水平-垂直轉(zhuǎn)換機械臂等設(shè)備。可處理鉆桿和套管超級單根,最大管徑346.1 mm(13in)。在作業(yè)現(xiàn)場進行了10個月的工業(yè)性試驗,輸送管柱300余次。
1.1.5 系統(tǒng)工作流程
鉆臺、場地全套機器人系統(tǒng)可實現(xiàn):①在堆場取鉆桿和套管,起下鉆和下套管;②在立根臺取鉆桿和套管,起下鉆和下套管;③離線建立根;④安裝和取出鉆柱短節(jié);⑤取放鉆桿等作業(yè)工況實現(xiàn)程序化自動控制,多設(shè)備協(xié)同作業(yè),無需人員干預(yù),極大保障了長時間連續(xù)作業(yè)的一致性和工作效率。
1.2 NOV作業(yè)機器人
1.2.1 NOV鉆臺機器人
美國NOV公司的ATOM RTXTM鉆臺作業(yè)機器人可與其Cyberbase和Amphion等自動化系統(tǒng)兼容。該作業(yè)機器人由6自由度機器人和可更換鉗頭2部分組成,如圖4所示。機器人負載可達200 kg,最大作業(yè)半徑超過3.5 m,防爆和防護等級滿足鉆臺井口區(qū)域作業(yè)要求。可更換鉗頭包括扶持鉗頭、鉆井液盒、清扣器、對扣器等類型,能夠支持快速自動更換,完成起下鉆時推扶鉆桿、鉆井液防噴、清潔螺紋、上扣時對扣等作業(yè)[8]。

圖4 NOV 鉆臺機器人及其鉗頭附件Fig.4 NOV drill floor robot and its tong head accessories
首套NOV鉆臺機器人于2022年第三季度開始在巴西的超深水鉆井平臺使用,可完全替代井口危險區(qū)域人工推扶鉆桿作業(yè),使人員遠離危險區(qū)域。
1.2.2 管柱自動化作業(yè)機器人系統(tǒng)
由鉆臺機器人和二層臺機器人及其他附屬設(shè)備組成的管柱自動化作業(yè)機器人系統(tǒng)可實現(xiàn)鉆臺面與二層臺的無人化作業(yè)。
該系統(tǒng)方案主要由2套機器人構(gòu)成,其中一臺安裝于鉆臺面立根臺通道(鉆臺機器人),另一臺倒置安裝于二層臺舌臺(二層臺機器人)。下鉆作業(yè)時二層臺機器人首先將立根推扶至游吊系統(tǒng)通道交予液壓吊卡;游吊系統(tǒng)提升立根,同時鉆臺機器人推扶立根低位送至井口,與井內(nèi)管柱上扣。起鉆作業(yè)與該流程相反。
該機器人通過司鉆房內(nèi)雙司鉆遠程操作完成作業(yè),由機器人按預(yù)定軌跡完成自動作業(yè),中間過程無需人員直接干預(yù)。
1.3 道達爾巡檢機器人
法國道達爾公司的巡檢機器人TAUROB配備攝像頭、氣體探測器、麥克風(fēng)等傳感器,現(xiàn)場將實時數(shù)據(jù)發(fā)送至遠程基地,遠程基地應(yīng)用處理算法自動分析數(shù)據(jù)表征,將結(jié)果與人工勘察進行對比,具有較強一致性[9]。可以執(zhí)行的典型任務(wù)包括傳輸真實顏色或紅外線的圖像、視頻及采集聲音,讀取本地指示器,識別閥門位置以及遠程檢測碳氫化合物等,如圖5所示。
該類巡檢機器人可替代人員的重復(fù)性勞動和高危作業(yè),大幅提升現(xiàn)場安全程度,主要作業(yè)任務(wù)包括巡檢、保養(yǎng)、維修、應(yīng)急處理等4大類數(shù)10種現(xiàn)場作業(yè)。①巡檢:攝像頭、紅外傳感器等對儀表讀數(shù)、物體測溫等;機械臂操作閥門開關(guān),多設(shè)備協(xié)同作業(yè)等。②保養(yǎng):基于溫度、噪聲等設(shè)備運行狀態(tài)的健康監(jiān)測;基于3D模型的設(shè)備完整性、腐蝕等檢查,設(shè)備的日常操作等。③維修:視頻信號實時遠傳,輔助故障排查;按需安裝物聯(lián)網(wǎng)傳感器,如振動傳感器等;簡單設(shè)備的拆卸、更換配件等作業(yè)。④應(yīng)急處理:氣、液體泄漏檢測、準(zhǔn)確定位與評估;安全監(jiān)控(如人員入侵);消防支持(如軟管連接和使用)。
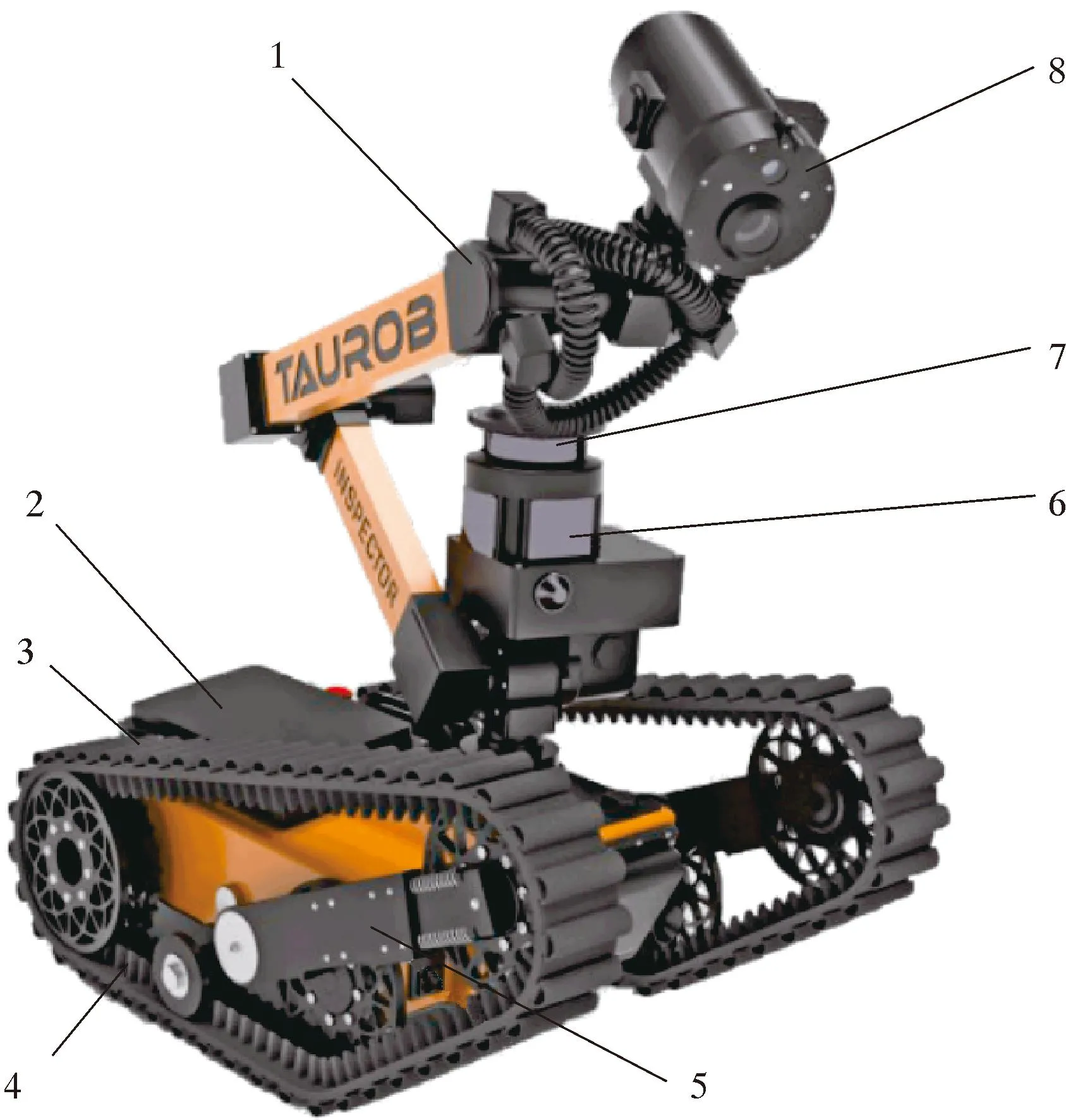
1—5自由度關(guān)節(jié);2—神經(jīng)網(wǎng)絡(luò)中央處理單元;3—無線通信模塊;4—履帶;5—導(dǎo)向臂;6—360°全景相機;7—3D激光雷達;8—高清相機和熱成像相機模組。
2 國內(nèi)電驅(qū)動管柱處理設(shè)備
2.1 電動扶管手
寶雞石油機械有限責(zé)任公司(以下簡稱寶石機械)于2021年研發(fā)了6軸扶管手(電動扶管機械臂),實現(xiàn)了鉆桿、鉆鋌的推扶、對扣等作業(yè)。該機械臂可根據(jù)目標(biāo)位置自動規(guī)劃軌跡,主動避障,姿態(tài)調(diào)整系統(tǒng)能夠確保鉗頭在運動過程中一直處于水平狀態(tài),作業(yè)半徑2.8 m,推扶能力6 kN。單次作業(yè)19 s。能夠完全替代井口人工推扶鉆具、對扣等作業(yè),使人員遠離危險區(qū)域。
2.2 電動二層臺機械手
自2017年起,三一重工、寶石機械等分別研制了電動二層臺機械手,懸掛于二層臺下方,用于實現(xiàn)立根在指梁與井口之間的轉(zhuǎn)移,能夠完全替代井架工的高空作業(yè),實現(xiàn)高處無人化,大大提升了現(xiàn)場作業(yè)安全性。
2.3 電動指梁
國內(nèi)油氣裝備制造企業(yè)于2017年開始運用伺服驅(qū)動、現(xiàn)場總線等技術(shù)研發(fā)的電動指梁,能夠高效精準(zhǔn)控制擋桿動作,并能夠?qū)崟r反饋位置狀態(tài),通過與排管機械手之間實時交互數(shù)據(jù),實現(xiàn)二者無操作的自動配合作業(yè)。運用現(xiàn)場總線極大地縮減了高位布線數(shù)量,減少故障點。高防護等級的電氣元件能夠適應(yīng)現(xiàn)場作業(yè)環(huán)境。較之氣動指梁能夠避免動力氣源中含水,致使低溫環(huán)境下執(zhí)行機構(gòu)結(jié)冰無法動作的問題。
2.4 智能巡檢機器人
防爆輪式巡檢機器人主要由巡檢機器人本體、驅(qū)動、RFID定位、前后導(dǎo)航組件、PID氣體檢測儀、前后避障傳感器、防爆揚聲器、天線、拾音器、防爆云臺和自動充電組件等組成[10]。該機器人可代替完成特殊環(huán)境下設(shè)備運行狀態(tài)的檢測診斷,實現(xiàn)設(shè)備區(qū)域全覆蓋巡視,有效降低設(shè)備停擺、漏油、火災(zāi)、盜竊等安全隱患,緩解值班人員力量薄弱的問題,提升工作效率。
3 技術(shù)分析
3.1 國內(nèi)外技術(shù)對標(biāo)分析
筆者從產(chǎn)品類別、最大載荷、環(huán)境適應(yīng)性、實現(xiàn)功能、控制算法、控制精度、應(yīng)用情況、安裝便利性等8個維度對國內(nèi)外產(chǎn)品進行對標(biāo)分析,結(jié)果如表3所示。
由表3可知,國內(nèi)在裝備電動化程度、單機載荷能力、協(xié)同作業(yè)能力等方面與國外產(chǎn)品還存在一定差距,尤其是海工產(chǎn)品方面,國內(nèi)暫無適應(yīng)海洋鹽霧環(huán)境產(chǎn)品的應(yīng)用案例。而在單元設(shè)備的推廣應(yīng)用方面國內(nèi)大幅度領(lǐng)先于國外。總體分析4個方面國外技術(shù)領(lǐng)先,3個方面國內(nèi)外技術(shù)持平,1個方面國內(nèi)技術(shù)領(lǐng)先。
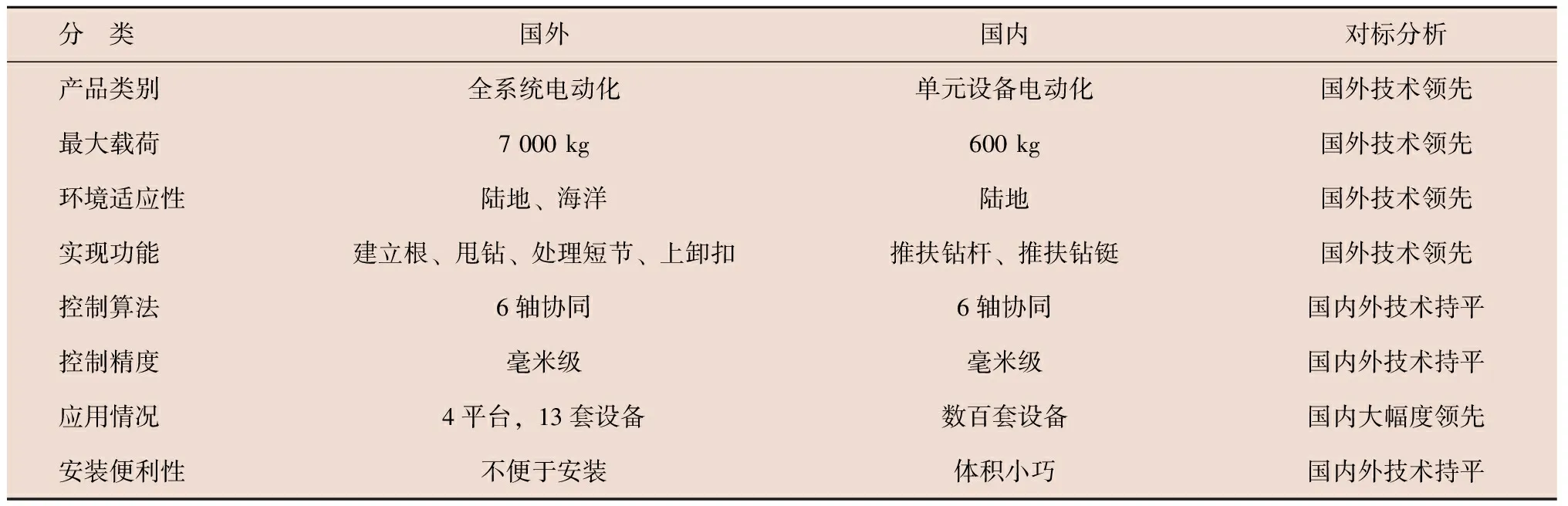
表3 國內(nèi)外電驅(qū)裝備對標(biāo)分析Table 3 Benchmarking analysis of domestic and foreign electrically driven equipment
3.2 趨勢及建議
3.2.1 顛覆傳統(tǒng)作業(yè)流程,研發(fā)適用于電傳動特
性的作業(yè)裝備
當(dāng)前國內(nèi)電動管柱自動化設(shè)備以替代人工作業(yè)為主,即作業(yè)流程依然沒有變化。這對機械系統(tǒng)設(shè)計帶來很大挑戰(zhàn),且效率較難突破。應(yīng)以機械化作業(yè)理念為出發(fā)點,顛覆傳統(tǒng)管柱處理作業(yè)模式,研發(fā)適用于機器人工作特點的作業(yè)流程,大幅提升作業(yè)效率與運行安全性。
3.2.2 變革現(xiàn)有作業(yè)模式,由單機順序作業(yè)向多
機協(xié)同作業(yè)轉(zhuǎn)變
目前,鉆機作業(yè)機器人以單機作業(yè)或多機順序作業(yè)為主,設(shè)備執(zhí)行效率還有進一步提升的空間,需補強載荷短板、攻關(guān)復(fù)合聯(lián)動控制算法、研發(fā)高精度執(zhí)行部件,提升應(yīng)對鉆井作業(yè)復(fù)雜工況的多機協(xié)同作業(yè)能力與柔性化作業(yè)水平。
3.2.3 大幅提升感知能力,由信息測量向知識儲
備型自主決策轉(zhuǎn)變
感知、決策、執(zhí)行是機器人的作業(yè)過程。感知精度、廣度等都直接影響著其決策、執(zhí)行能力。應(yīng)采取多屬性融合感知技術(shù),提升其對外界環(huán)境、作業(yè)目標(biāo)的全面感知能力,提升自主化水平。而決策與執(zhí)行直接關(guān)聯(lián),應(yīng)構(gòu)建機器人作業(yè)知識圖譜,增強其對實時工況的判斷力,指導(dǎo)開展高效精準(zhǔn)作業(yè)。
4 結(jié)束語
文章分析了國內(nèi)外電動化裝備技術(shù)及應(yīng)用現(xiàn)狀,所用的主要設(shè)備包括鉆臺機器人、排管機器人以及巡檢機器人等主要裝備,全部應(yīng)用伺服電機驅(qū)動,3~6軸執(zhí)行機構(gòu),防護防爆等級方面完全適用于油田工作要求。國外在產(chǎn)品運行效率、作業(yè)能力等方面較之國內(nèi)具有技術(shù)優(yōu)勢,而國內(nèi)在產(chǎn)業(yè)化推廣方面明顯優(yōu)于國外。通過對標(biāo)分析預(yù)測了勘探開發(fā)領(lǐng)域機器人將向作業(yè)流程創(chuàng)新、作業(yè)模式變革、感知決策能力提升等方向發(fā)展。
猜你喜歡
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
新作文·小學(xué)低年級版(2021年9期)2021-11-27 07:57:46
學(xué)生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
經(jīng)濟技術(shù)協(xié)作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
故事大王(2016年7期)2016-09-22 17:30:08
工業(yè)設(shè)計(2016年12期)2016-04-16 02:52:00
設(shè)備管理與維修(2015年12期)2015-04-09 06:57:00
消費者報道(2014年7期)2014-07-31 11:23:57