有軌電車通過平交路口車路協同速度控制系統*
2024-02-22 12:47:36童文聰李君羨
城市軌道交通研究 2024年2期
童文聰 滕 靖 姚 幸 李君羨
(1.同濟大學交通運輸工程學院,201804,上海;2.上海市軌道交通結構耐久與系統安全重點實驗室,201804,上海; 3.上海城建設計研究總院,200125,上海)
有軌電車一般鋪設于城市道路中央或路側,其在路段行駛時常使用專屬路權,以避免受到其他車輛或行人的干擾。當有軌電車通過平交路口時,由于存在不同方向的交通流沖突,需與其他交通形式共享道路空間并依照信號燈指示通行,因此有軌電車通常采用信號優先技術來提高平交路口不停車的通行概率。有軌電車路段的限速一般為50~60 km/h,但出于安全考慮,有軌電車在平交路口必須減速行駛。根據相關規定[1],有軌電車在通過平交路口時的行駛速度不得超過30 km/h。在平交路口頻繁加減速將影響有軌電車整體的行程車速[2],還會增加其能耗損失。
為解決有軌電車在平交路口必須降速的問題,本文提出一種有軌電車通過平交路口車路協同速度控制系統,分析了有軌電車通過平交路口的車速特征,闡述了有軌電車不減速通過平交路口的實現原理及其系統物理結構和控制邏輯,最后基于不同平交路口位置特征評估所提控制系統的實施效益。本文研究可為提升有軌電車的行駛速度及可靠性提供研究思路和技術指導。
1 有軌電車平交路口運行特征分析
有軌電車在平交路口一般采用司機目視的行車方式,即:有軌電車在進入平交路口前開始減速;在通過平交路口時,其運行速度控制在平交路口所允許的最大限速內;在確認無潛在沖突后,有軌電車加速離開平交路口。以上海松江有軌電車T2線為例,分析其實測數據可知,有軌電車在平交路口的運行軌跡呈V字形,存在一個運行速度最低點vmin,其值直接影響有軌電車在平交路口的運行速度。
由于平交路口可能出現的沖突干擾和人工駕駛操作的不確定性,有軌電車在平交路口運行時,具有一定的隨機性。取177條有軌電車不停車通過平交路口的速度軌跡曲線(假設平交路口限速為30 km/h),對其在置信度為0.05條件下進行 K-S (Kolmogorov-Smirnov)檢驗。研究結果表明,vmin滿足N(20.3,10.3)的正態分布檢驗要求,極端誤差D=0.068。將vmin樣本數據按速度大小等距劃分為30組,繪制其頻率分布圖如圖1所示。由上述統計數據可知,vmin的期望值為20.3 km/h,遠小于平交路口的限速值,其標準差為10.3,說明vmin較不穩定。vmin對有軌電車的運行效率和可靠性有較大的影響。

注:頻率指各組樣本數據個數與樣本總數的比值。
2 有軌電車通過平交路口車路協同速度控制系統設計
有軌電車制動減速度較小,以運行速度為60 km/h為例,其緊急制動需要的時間約為9 s,制動距離不小于100 m;常規制動需要的時間約為18 s,制動距離不小于200 m[3]。由于制動距離和制動時間過大,有軌電車駕駛員無法在高速行駛時預判平交路口可能存在的沖突,只能在通過平交路口時采用較低的速度行駛,以保證足夠的制動反應時間。
為解決有軌電車在高速運行條件下制動時間較長、平交路口沖突無法預判的問題,本文擬采用可控實體隔離方法,由有軌電車主動發出隔離控制請求,預先對平交路口通行區域進行清空,以保證列車在制動反應時間內不會發生不可預計的沖突,進而達到不減速通過平交路口的目的。
為解決控制系統運行的安全性問題,本文擬采用清空區沖突檢測技術,有軌電車可根據所獲得的平交路口檢測情況,對可能發生的危險進行預判,對不符合快速通過要求(如無綠燈信號或清空區被占用)的有軌電車,實行降速或緊急制動處理。同時,將平交路口當前視頻監控信息發送給司機進行二次安全評估,增加所提控制系統的可靠性。此外,增加有軌電車通過警示信息,以倒計時的方式給平交路口通行的車輛和行人予以提醒,減少違規侵占清空區的情況。
基于上述設計思路,本文提出一種有軌電車通過平交路口車路協同速度控制系統。所提控制系統由平交路口路面設施、平交路口控制系統和有軌電車車載控制系統三部分組成。有軌電車通過平交路口車路協同速度控制系統結構示意圖如圖2所示。平交路口路面設施包括有軌電車傳感定位系統、交通信號控制機、清空區及沖突檢測設備、可控實體隔離設備、警示系統和視頻監控系統。平交路口設施布置示意圖如圖3所示。

圖2 有軌電車通過平交路口車路協同速度控制系統結構示意圖

圖3 平交路口設施布置示意圖
平交路口控制系統主要用于對平交路口的路面設施進行管理,配合和支持有軌電車車載系統。有軌電車車載系統內含控制算法模塊,可對平交路口路面設施的傳輸信息進行分析與邏輯計算,并執行控制系統指令。平交路口路面設施的功能設置如下:
1) 交通信號控制機。配合有軌電車車載系統的控制算法,能夠實現有軌電車平交路口信號優先通行。
2) 警示系統。響應有軌電車車載控制系統控制算法發出的控制指令,向平交路口車輛和行人提供有軌電車即將通過的聲光預警和隔離操作倒計時。
3) 清空區及沖突檢測設備。清空區為保證有軌電車能無阻礙通過平交路口所劃定的區域,由有軌電車的通行軌跡與平交路口范圍相交平面構成。沖突檢測設備用于檢測預劃定的清空區是否存在行人、車輛或其他阻礙物,并將檢測結果反饋給有軌電車車載系統。當有軌電車即將駛入平交路口時,如清空區未清空,將通知有軌電車減速,并撤銷隔離操作。清空區檢測可采用多種檢測技術,如視頻識別、微波或重力感應技術等,互為冗余,以保證系統的可靠性。
4) 可控隔離設備。所提控制系統通過臨時性的實體路障劃定隔離區域。根據有軌電車車載控制系統控制算法發出的控制指令,可控隔離設備在規定時間內完成該平交路口建立或撤銷隔離操作,并向系統返回操作成功與否的信息。可控隔離設備能臨時性形成一個有軌電車通行獨享的封閉區間,阻止車輛、行人和非機動車穿越有軌電車通行通道,避免沖撞。
5) 平交路口傳感定位設備。平交路口傳感定位系統包括5組有軌電車位置檢測器,在有軌電車通過預設定軌道斷面時生成1組車輛斷面通過信號,并將信息傳輸至有軌電車車載系統,有軌電車車載系統由此獲得有軌電車相對于特定平交路口所處的位置信息。
5個定位檢測器鋪設示意圖如圖4所示,對5個有軌電車定位檢測器的位置作如下設置。

圖4 定位檢測器鋪設示意圖

2) 第二定位檢測器,位于信號優先申請檢測點B,其至路口停車線的距離dB應滿足:dB≥dsm,dsm為平交路口信號控制系統進行公交優先申請所需的最小距離[4]。
3) 第三定位檢測器,位于限速檢測點C,其至路口停車線的距離dC應滿足:dC>dsl,dsl為該區段有軌電車采取一般制動時從區段可能最高速度降低至平交路口限速以下所需距離。
4) 第四定位檢測器,位于緊急制動檢測點D,其至路口停車線距離dD應滿足:dD≥deb。
5) 第五定位檢測器,位于有軌電車離開檢測點E,其至有軌電車平交路口最近沖突點距離dE應滿足:dE≥Lv,Lv為有軌電車長度。
由于有軌電車的起始車速受上游停車點的影響,其定位檢測器距離停車線的位置與上游站臺間距有關。以上海松江有軌電車T2線的車輛參數為計算依據,以平直線路為基本運行場景,取tcd=10 s,tse=7 s,有軌電車限速vlim=60 km/h,通過計算獲得的各定位檢測器至停車線距離如表1所示。由于信號優先申請及反饋速度較快,因此檢測點B距停車線位置只需比檢測點C略大即可,本文取為30 m。檢測點E設在有軌電車與平交路口最后交通沖突點下游50 m處。

表1 定位檢測器至停車線距離
3 控制邏輯設計
控制算法模塊用于執行有軌電車通過平交路口的自動控制邏輯,控制算法模塊運行流程圖如圖5所示。

圖5 控制算法模塊運行流程圖
控制算法模塊運行步驟如下:
步驟1 有軌電車以全速運行,到達檢測點A,向警示系統發送警示要求,啟動隔離倒計時,同時將平交路口實時監控畫面反映到有軌電車駕駛室。
步驟2 有軌電車繼續全速運行,由遠及近靠近平交路口,到達檢測點B,向交通信號機發送信號優先申請并等待回復。
步驟3 有軌電車繼續全速行駛,到達檢測點C,此時,若未收到信號優先許可信息、優先許可信息為否或檢測到系統故障,進入步驟4,否則進入步驟5。
步驟4 有軌電車啟動常規制動,將車速降低至平交路口限速以下,同時取消隔離倒計時和后續隔離操作,由司機視實際情況駕駛通過平交路口。
步驟5 有軌電車繼續全速前進,并在隔離倒計時結束時啟動隔離操作,如隔離操作執行成功,對清空區進行沖突檢測并向有軌電車發送檢測結果。當有軌電車到達檢測點D時,若隔離操作執行失敗、清空區檢測存在沖突或檢測到系統關鍵模塊發生故障,進入步驟6,否則進入步驟7。
步驟6 有軌電車啟動緊急制動,在進入平交路口前停下,撤銷隔離操作,由司機視實際情況駕駛通過平交路口。
步驟7 有軌電車全速通過平交路口,達到檢測點E,撤銷隔離操作并離開平交路口。
考慮到有軌電車啟動緊急制動易引發客傷事件,應加強其設備可靠性以避免發生故障,必要時配備安全管理員進行秩序管理,減少緊急制動觸發概率。
4 控制系統實施效應分析
有軌電車站臺一般結合平交路口進行設置,而在設站平交路口有軌電車必停車,因此所提控制系統主要設置在不設站平交路口處,且所提控制系統實施效果與站臺和平交路口位置有關。有軌電車站間距一般為600~1 000 m,平交路口常見間距為300~600 m,兩個站臺之間常存在一個不設站平交路口,以此常見情況為基本研究區間。設M點、N點為有軌電車站臺,O為不設站臺平交路口。MN距離為l,MO距離為l1,NO距離為l2,設MO距離與MN距離的比例r=l1/l,r值表征了平交路口在區間所在的相對位置。
以上海松江有軌電車線路列車運行參數為例,構建有軌電車運行評價模型[5]。計算當vmin=20.3 km/h時,不同l和r條件下,所提控制系統實施前后,區間運行延誤和能耗的變化情況。平交路口相對位置比例r會影響有軌電車的加速距離,進而影響有軌電車在平交路口的通過速度,導致區間運行時間和能耗指標的變化。考慮有軌電車運行有兩個方向,r的取值采用雙向來車均值,即r與1-r對稱,故設r的取值范圍為0.1~0.5。以路段限速60 km/h的平直線路為基本運行場景,對所提控制系統進行實施效應評價。由于l和r均會對實施效果造成影響,設l在200~2 000 m范圍內以100 m為間隔取值,r在0.1~0.5范圍內以0.1為間隔取值,生成評估場景集合。
設tb、ta分別為所提控制系統實施前、后的有軌電車區間運行時間,二者比值pt=tb/ta。不同r條件下,pt與l的關系如圖6所示。由圖6可知:pt隨著l的增大呈現先增大后減小的趨勢,同時其隨著r的增大而逐漸增大;當l=500 m、r=0.5時,pt達到峰值116.6%。這說明所提控制系統所在平交路口距離前后站臺250 m時的運行速度提升比例最高。

圖6 不同r條件下pt與l之間的關系
不同r條件下,延誤減少量與l之間的關系如圖7所示。由圖7可知:區間運行延誤減少量隨著l和r的增大而增大,但在達到峰值9.2 s后不再增加。這說明在這些場景下有軌電車已充分加速,在平交路口的運行速度已達到路段限速,無法再提升,延誤減少量在該情況下達到上限。

圖7 不同r條件下延誤減少量與l之間的關系
由于所提控制系統能夠減少減速制動的能量損失,其同時也能夠減少有軌電車的區間運行能耗。設eb、ea分別為所提控制系統實施前、后的有軌電車區間運行能耗,二者比值pe=eb/ea。不同r條件下,pe與l的關系如圖8所示。由圖8可知:pe隨著l的增大呈現先增大后減小的趨勢,同時其隨著r的增大而逐漸增大;當l=700 m、r=0.5時,pe達到峰值162%。
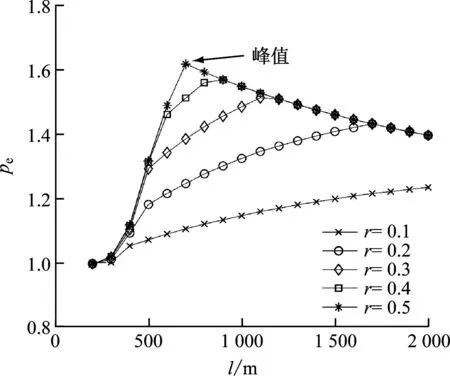
圖8 不同r條件下pe與l之間的關系
為研究有軌電車通過平交路口的運行時間偏差特性,已知vmin~N(20.3,10.3),基于蒙特卡洛思想,對不同l和r條件下,執行5 000次vmin隨機選值,并代入模型計算其標準差分布特性。不同r條件下區間運行時間標準差與l之間的關系如圖9所示。由圖9可知:隨著l和r的增大,有軌電車受到的平交路口速度干擾逐漸增大,但增幅逐漸放緩,穩定后的標準差數值約為5.3 s。由此可知,所提控制系統可以降低有軌電車由于平交路口限速引發的速度偏差,進而提高有軌電車運行的時間可靠性。

圖9 不同r條件下區間運行時間標準差與l之間的關系
綜上所述,所提控制系統對降低有軌電車延誤、減少能耗和提高運行時間可靠性作用顯著,其實施效果與平交路口位置和區間長度有關,當平交路口與前后站臺相距超過250 m時,所提控制系統具有較好的實施效益。
5 結語
區別于地鐵和輕軌,有軌電車的主要特征在于平交路口的非封閉性,有軌電車通過平交路口時呈V字型減速后再加速,存在一個運行速度最低點,其值直接影響有軌電車在平交路口的運行速度。本文提出一種有軌電車通過平交路口車路協同速度控制系統,基于列車定位技術和清空區沖突檢測技術,采用臨時性實體隔離方式創建有軌電車獨享通行空間,使有軌電車能以較大概率不減速通過平交路口,有利于提高有軌電車的運行速度及時間可靠性,降低運行能耗。
不同平交路口相對上下游停車點的位置對所提控制系統的實施效果有較大影響。因此可根據實際線路情況選擇實施點位。線路中可以只對部分無站臺平交路口進行改造,改造量小且能取得較好的效果。此外,由于可控隔離的建立和撤銷會占用一定的綠燈時間,對信號控制方案有一定的影響,應結合具體情況進行分析研究。
