基于機(jī)器視覺的變電站一體化安防管控系統(tǒng)設(shè)計
2024-02-29 04:21:48馬洪波邱凱義
計算機(jī)測量與控制 2024年2期
馬洪波,邱凱義,劉 潔
(1.國網(wǎng)信息通信產(chǎn)業(yè)集團(tuán) 北京分公司,北京 100052;2.華北電力大學(xué) 控制與計算機(jī)工程學(xué)院,河北 保定 071003)
0 引言
變電站作為智能輸電的重要區(qū)域,其區(qū)域安全十分重要,隨著數(shù)字科技水平的不斷發(fā)展,變電站的安全防護(hù)也在逐漸朝著科技化、智能化發(fā)展,實(shí)施著無人看守式的視頻設(shè)備管控模式。傳統(tǒng)的安防管控系統(tǒng)設(shè)計方案,往往是單一化模塊工作安防措施,在實(shí)際應(yīng)用過程中誤報率相對較高,無法達(dá)到各個模塊協(xié)同作業(yè)的效果,危險入侵定位精度較差。
對于變電站安防系統(tǒng)的不斷優(yōu)化研究,一些學(xué)者提出了不同的解決方法:丁曉強(qiáng)[1]研究出一種針對火電危險情況的安防系統(tǒng),針對火電的特征情況,綜合分析總結(jié)火電相關(guān)單位的反恐經(jīng)驗(yàn),設(shè)計出可處理多任務(wù)的安全防控系統(tǒng);陳斌等人[2]研究了一種三維建模系統(tǒng),通過三維建模完成變電站單體設(shè)備和環(huán)境的映射,在輔助控制子系統(tǒng)基礎(chǔ)上連接插件接口以及數(shù)據(jù)間的傳輸交互,形成智能監(jiān)控和報警聯(lián)控模式。但這些方法在系統(tǒng)響應(yīng)能力上略差,系統(tǒng)的耐久性不夠。
本文在研究變電站安防管控系統(tǒng)時,結(jié)合多種安全防控硬件設(shè)備,通過網(wǎng)絡(luò)完成設(shè)備間的連接和有效通信,實(shí)現(xiàn)安防管控一體化,符合自主性安防監(jiān)控和人工處置兩個管控方向,智能管控變電站周界安全防護(hù),具備線上線下警視聯(lián)動優(yōu)勢,安裝智能門禁識別分系統(tǒng),有效管控變電站出入人員及記錄,形成多方位的安防管控系統(tǒng)。
1 變電站一體化安防管控系統(tǒng)整體結(jié)構(gòu)
在設(shè)計變電站一體化安防管控系統(tǒng)時,考慮到機(jī)器視覺的電量關(guān)系,在設(shè)置變電站前端現(xiàn)場的視覺監(jiān)控設(shè)備時,主要依據(jù)變電站實(shí)際情況安裝相應(yīng)數(shù)量的高清攝影機(jī)和紅外煙霧報警器[3],使高清攝像機(jī)與硬盤錄像機(jī)相連,單個硬盤錄像機(jī)可與最多16個攝影機(jī)實(shí)現(xiàn)同步連接,且能夠直接與交換機(jī)相連完成作業(yè),針對變電站對于溫度、濕度以及電流電量等相關(guān)參數(shù)的安防問題,本文設(shè)計采用數(shù)據(jù)分析采集器[4]、溫度濕度傳感器以及電量傳感器,實(shí)現(xiàn)防控監(jiān)測數(shù)據(jù)的收集和傳輸,具體的數(shù)據(jù)采集系統(tǒng)結(jié)構(gòu)如圖1所示。
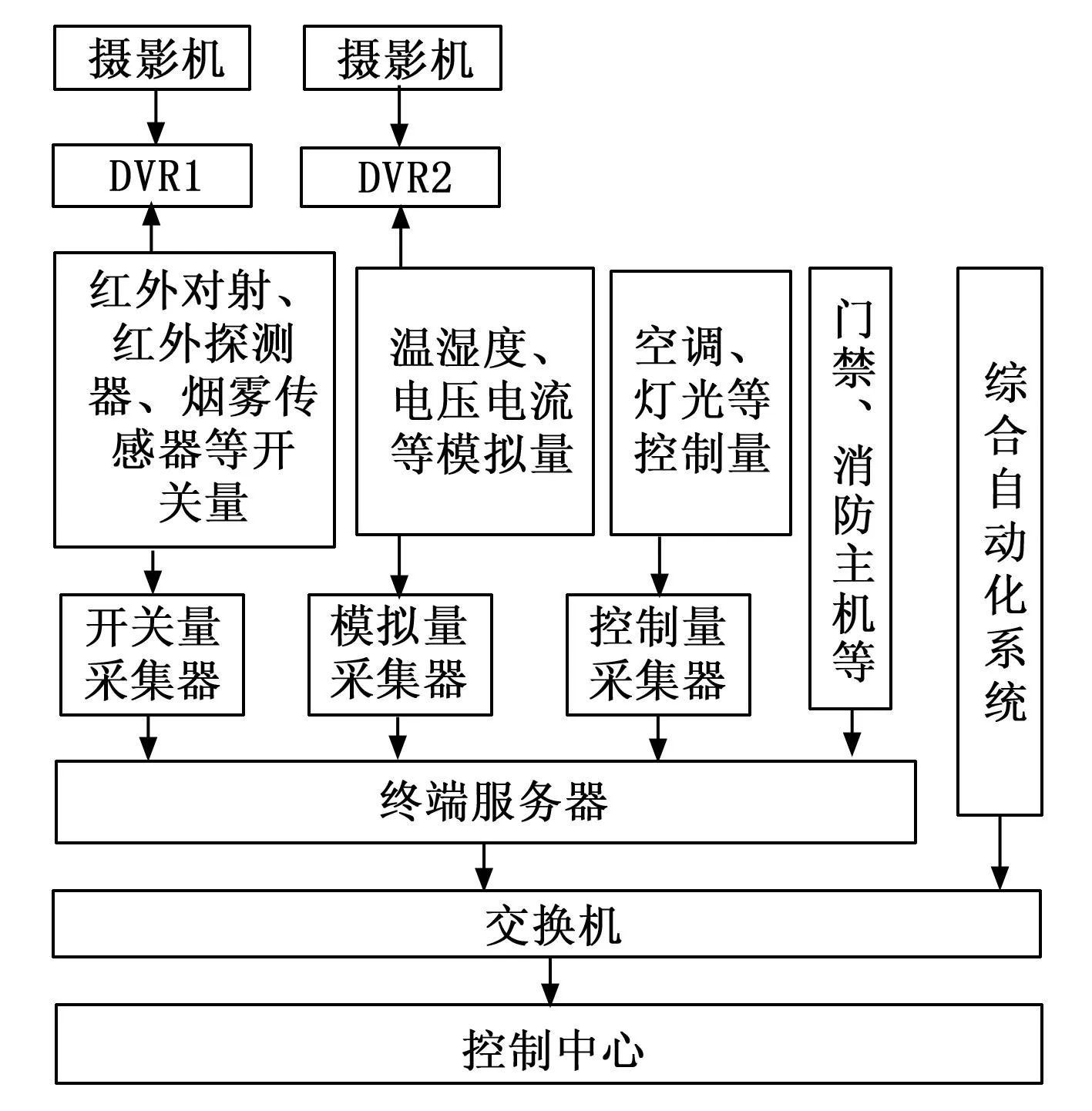
圖1 安防監(jiān)測數(shù)據(jù)采集系統(tǒng)結(jié)構(gòu)
變電站安防管控系統(tǒng)主要通過高清攝影機(jī)的機(jī)器視覺效果獲取圖像信號,并經(jīng)由計算網(wǎng)絡(luò)轉(zhuǎn)換成數(shù)字信號傳輸給目標(biāo)監(jiān)控終端,網(wǎng)絡(luò)覆蓋面積較大的情況下不會受到地域環(huán)境的限制[5]。在計算機(jī)網(wǎng)絡(luò)鋪設(shè)網(wǎng)絡(luò)內(nèi),利用標(biāo)準(zhǔn)的TCP/IP網(wǎng)絡(luò)協(xié)議,獲取的數(shù)字視頻信號在傳輸機(jī)制作用下可以實(shí)現(xiàn)多網(wǎng)并一網(wǎng)[6]。電力公司針對變電站整體的調(diào)度中心配置一臺中心主控監(jiān)控服務(wù)器,并在服務(wù)器內(nèi)安裝主控管理軟件[7],目的是統(tǒng)一化管理變電站前端安裝的所有攝影機(jī)以及視頻服務(wù)器,并監(jiān)管服務(wù)管理后臺所有登錄用戶的權(quán)限,相關(guān)的管理人員可以通過安全授權(quán),登錄瀏覽器實(shí)時訪問中心主控服務(wù)器,安全監(jiān)管變電站前段攝影機(jī)獲取畫面和數(shù)據(jù)。安防管控系統(tǒng)的網(wǎng)絡(luò)架構(gòu)主要包括變電站的實(shí)時監(jiān)控現(xiàn)場、數(shù)據(jù)傳輸網(wǎng)絡(luò)以及調(diào)度監(jiān)管中心[8]。
2 系統(tǒng)軟硬件設(shè)計
2.1 核心控制系統(tǒng)硬件
在變電所周邊環(huán)境中設(shè)置了一個現(xiàn)場監(jiān)控控制器,它是整個系統(tǒng)硬件的一個前端控制中心,它的作用是探測到變電站的安全威脅,并接受由激光柵欄報警,并實(shí)時控制柵欄、探照燈、語音報警等工作模塊,現(xiàn)場控制器需要保證與中間控制器之間的無線傳感器通信正常,系統(tǒng)硬件中包含STC89C52單片機(jī)、探照燈、激光圍欄,并在此基礎(chǔ)上添加智能語音報警模塊[9],當(dāng)變電站外圍設(shè)立的激光圍欄被惡意入侵的情況下,激光圍欄會實(shí)時采集入侵信息,通過系統(tǒng)的激光圍欄控制模塊和無線傳感器通信模塊實(shí)現(xiàn)安全防控監(jiān)測和警報。
當(dāng)現(xiàn)場存在惡意事件,連接門電路和外部環(huán)境的終端電子,通過二者之間的協(xié)同作業(yè),可以有效完成檢測激光電子圍欄的入侵。在電子圍欄處于安全無入侵狀態(tài)下,激光圍欄發(fā)射出的高電平電子信號不會被單片機(jī)外部檢測終端觸碰[10]。若是電子圍欄一旦被入侵,被危險入侵的所屬圍欄部分,則會發(fā)出頻率較低的電平信號,電平信號經(jīng)過系統(tǒng)中的非門74LS30和三極管部分,在綜合作用下使低電平信號觸發(fā)到單片機(jī),此時單片機(jī)受到觸碰后進(jìn)入到外部中斷狀態(tài),單片機(jī)快速狀態(tài)檢測所有的激光電子圍欄P1接口,通過序列巡檢后確定危險入侵圍欄對應(yīng)的編號,通過比對圍欄編號和安裝信息最終確定危險入侵激光圍欄的具體位置[11]。
機(jī)器視覺硬件部分的組成主要依靠高清模擬攝影機(jī)、數(shù)字轉(zhuǎn)換攝影機(jī)和網(wǎng)絡(luò)傳輸攝影機(jī)組成,高清模擬攝影機(jī)利用模擬通訊信號完成圖像采集傳輸,但由于其比較容易受到變電站的強(qiáng)電磁影響,因此在考慮機(jī)器視覺穩(wěn)定性的前提下,利用數(shù)字轉(zhuǎn)換攝影機(jī)與后端網(wǎng)絡(luò)設(shè)備相連,實(shí)現(xiàn)機(jī)器視覺抗干擾能力的增強(qiáng),通過網(wǎng)絡(luò)傳輸攝影機(jī)可以實(shí)現(xiàn)強(qiáng)有力的聯(lián)網(wǎng)效應(yīng)[12]。選用DS-2DE7174智能球形攝影機(jī)作為變電站一體化安防管控系統(tǒng)的視覺硬件機(jī)器,選用機(jī)器不僅具備夜視能力,同時可實(shí)現(xiàn)云臺穩(wěn)定拍攝,其自身具備的集成網(wǎng)絡(luò)服務(wù)器能夠輔助其他客戶端完成遠(yuǎn)程控制和訪問。
為了保證攝影機(jī)拍攝變電站周圍安全環(huán)境的視頻能夠?qū)崟r完成傳輸,利用以太網(wǎng)覆蓋變電站及周邊安全范圍,并通過網(wǎng)絡(luò)路由器輔助多個攝影機(jī)之間的連接,調(diào)整拍攝角度和攝影機(jī)存儲IP地址的分配,網(wǎng)路路由器與攝影機(jī)間的連接端口完成相關(guān)映射[13],并且網(wǎng)絡(luò)路由器通過TCP/IP協(xié)議與上位機(jī)連接,移動設(shè)備通過互聯(lián)網(wǎng)與網(wǎng)絡(luò)路由器連接,可以有效提高遠(yuǎn)程設(shè)備遠(yuǎn)程訪問攝影機(jī)的效率。
2.2 系統(tǒng)軟件設(shè)計
變電站一體化安防管控系統(tǒng)的軟件部分,首先考慮激光電子圍欄受到危險入侵的信號檢測問題,同時軟件部分必須滿足控制語音報警模塊、電子圍欄、檢測報警信號、探照燈、控制無線傳感器網(wǎng)絡(luò)等眾多模塊的需求。在現(xiàn)場控制裝置上電后,首先啟動電子?xùn)艡凇⒓す鈻艡谝约疤秸諢簦{(diào)動語音報警模塊,通過控制無線傳感器網(wǎng)絡(luò)的連接,網(wǎng)絡(luò)成功接入后,其進(jìn)入循環(huán)睡眠狀態(tài)[14],當(dāng)變電站周圍環(huán)境被危險入侵時,系統(tǒng)收到信號觸碰后,切斷設(shè)備,隨后由現(xiàn)場控制器相連組成無線傳感器網(wǎng)絡(luò)報警框并發(fā)出警報,每一條信號的數(shù)據(jù)幀完成傳輸后,會開始一個超時的響應(yīng)幀[15],若超過規(guī)定時間還沒有準(zhǔn)確接收到信號響應(yīng)幀,首先認(rèn)定報警幀丟失或是存在錯誤報警幀,此時需要重新發(fā)送新的警報幀。響應(yīng)幀的應(yīng)答回復(fù)次數(shù)為3次,若是超過次數(shù)仍未能應(yīng)答,安防管控系統(tǒng)將會重新啟動。該模塊通過中斷模式來檢測告警信號,通過中斷處理器標(biāo)記對應(yīng)的報警位置。
變電站安防管控系統(tǒng)建立于智能視頻監(jiān)控的基礎(chǔ)上,有效地智能處理機(jī)器視覺下獲得的安防視頻,并且要素類型定義視頻流,通過制定相應(yīng)的分類規(guī)則并建立視頻智能判斷模型,能夠?qū)崿F(xiàn)視頻流的深度分析、理解和效果評估,高效監(jiān)測變電站內(nèi)部和外部周圍環(huán)境的安全,利用智能模型判斷觸發(fā)型安全事件并實(shí)時提供語音報警功能,可實(shí)現(xiàn)自主性安防監(jiān)控和人工處置兩個管控方向,安防系統(tǒng)功能包括危險因素自動識別警報、動態(tài)物體監(jiān)測、火苗、煙霧、氣體、水流等各種實(shí)際情況的危險識別和預(yù)警。具體的安防管控一體化系統(tǒng)組成如圖2所示。

圖2 變電站一體化安防管控系統(tǒng)結(jié)構(gòu)
為了降低變電站安防管控系統(tǒng)中激光電子圍欄的誤報警率,提高圍欄對危險入侵的預(yù)判以及精準(zhǔn)定位性能,在此基礎(chǔ)上提高視頻安防監(jiān)控的信息密度,電廠周界防護(hù)在激光電子圍欄的作用下,采用激光柵格定位檢測危險入侵的具體位置點(diǎn),并實(shí)時阻攔,發(fā)送警報并使用通用分組無線電業(yè)務(wù)實(shí)現(xiàn)信息控制,無線網(wǎng)絡(luò)可以實(shí)現(xiàn)遠(yuǎn)程警報和視頻圖像遠(yuǎn)程控制,實(shí)現(xiàn)變電站周圍環(huán)境安全防護(hù)管理的智能控制系統(tǒng)。
安防管控系統(tǒng)分為前段監(jiān)控和后段管控兩個獨(dú)立的分層結(jié)構(gòu),前段視頻監(jiān)控結(jié)構(gòu)主要負(fù)責(zé)針對變電站周圍環(huán)境的危險入侵檢測,警報信息威懾及入侵取證等相關(guān)前期工作,后段的管控部分則顯示、儲存危險入侵報警信息,針對報警詳細(xì)信息控制前段攝影機(jī),通過網(wǎng)絡(luò)控制警報系統(tǒng)并處理入侵情況。
系統(tǒng)安防管控系統(tǒng)設(shè)置聯(lián)動報警感知技術(shù),通過計算機(jī)技術(shù)評估入侵事件危險程度及性質(zhì),利用通信技術(shù)識別非法入侵變電站防范區(qū)的行為并予以語音告警,通過聯(lián)防技術(shù)結(jié)合變電站的監(jiān)控圖像及視頻與聲光報警裝置,針對性實(shí)現(xiàn)防火防盜等多方位的安全防控功能,在紅外、超聲波等物理技術(shù)的輔助下,有效判斷敏感事件的發(fā)生并作出報警決策,線下手機(jī)終端同樣可以接收到遠(yuǎn)程監(jiān)控視頻及警報信息,實(shí)現(xiàn)線上線下警視聯(lián)動的可控化安防管控。
通常情況下,對于變電站而言,經(jīng)常發(fā)生也是概率最大的危險事件即為火災(zāi)及非法入侵,因此,系統(tǒng)選用了相應(yīng)的穿線傳感器探測周邊環(huán)境實(shí)施異常情況,一旦發(fā)生異常被傳感器檢測到即可觸發(fā)警報功能,此時與警報器線路相連的視頻監(jiān)控開啟自動定位系統(tǒng),自動記錄警報位置異常情況,實(shí)時分析視頻采集內(nèi)容,方便信息關(guān)聯(lián)和定位,第一時間掌握事故現(xiàn)場信息并完成事故根源追溯。
變電站的安全防控必不可少的是門禁管理,在安防管控系統(tǒng)內(nèi)裝置入門智能識別分系統(tǒng),智能監(jiān)控來往人員,利用智能門禁卡、電子密碼控制人員流動,為提高變電站智能性和安全性,采用虹膜、人臉以及指紋等多種識別方式,在此基礎(chǔ)上完成人流出入狀態(tài)記錄。
由于變電站處于晝夜長時間工作狀態(tài),因此保證變電站內(nèi)各項(xiàng)重要設(shè)備的安全運(yùn)行及電路穩(wěn)定是十分必要的,在一體化的安防管控系統(tǒng)下,管理人員的日常不定期巡視檢查也是必不可少,由此形成鏈條式多方位的系統(tǒng)及人員管理方案。
3 視覺識別定位算法設(shè)計
安全區(qū)域內(nèi)需要依靠機(jī)器人完成視覺巡查,其對移動目標(biāo)軌跡的定位很關(guān)鍵,因此,可將變電站尋物機(jī)器人對移動目標(biāo)軌跡跟蹤看作機(jī)器人角速度的控制。計算得出的理想軌跡和機(jī)器人動態(tài)軌跡,移動軌跡跟蹤控制模塊采用基于模糊神經(jīng)網(wǎng)絡(luò)PID控制方法,實(shí)現(xiàn)變電站尋物機(jī)器人移動軌跡跟蹤控制。
該控制方法主要是對理想軌跡和機(jī)器人動態(tài)軌跡之間的誤差實(shí)行控制,在控制過程中,通過線性二次型調(diào)節(jié)器(LQR)算法對機(jī)器人期望位姿q=(xr,yr,θr)和實(shí)際位姿qr=(xe,ye,θe)之間的耦合關(guān)系實(shí)行解耦處理后,將獲取的兩者的解耦量X′(t),作為模糊神經(jīng)網(wǎng)絡(luò)PID的輸入,通過該網(wǎng)絡(luò)的運(yùn)算輸出機(jī)器人角速度控制量ym,依據(jù)該控制量對機(jī)器人的驅(qū)動輪轉(zhuǎn)速實(shí)行控制,以此改變機(jī)器人移動時的角速度,實(shí)現(xiàn)機(jī)器人按照規(guī)劃的理想軌跡移動,完成機(jī)器人移動軌跡跟蹤。
LQR算法在進(jìn)行解耦過程中,僅依據(jù)與機(jī)器人角速度存在關(guān)聯(lián)的因素完成,文中主要為橫向和航向兩種偏差因素。將機(jī)器人理想軌跡和動態(tài)軌跡之間的偏差角以及偏差角的變化率輸入模糊神經(jīng)網(wǎng)絡(luò)PID中,輸出結(jié)果為PID的比例系數(shù)、積分和微分兩種時間常數(shù)3個參數(shù),分別用KP、TI、TD表示。PID的公式為:
(1)
式中,PID在t時刻的輸出用u(t)表示,也就是機(jī)器人的角速度控制量,機(jī)器人期望位姿和實(shí)際位姿偏差解耦后的輸出量用X′(t)表示。
為保證PID的跟蹤控制效果,采用Mandani推理模糊神經(jīng)網(wǎng)絡(luò)對PID實(shí)行優(yōu)化,該優(yōu)化是以u(t)的大小為依據(jù),實(shí)現(xiàn)KP、TI、TD三個參數(shù)的自適應(yīng)調(diào)節(jié)。模糊神經(jīng)網(wǎng)絡(luò)PID的機(jī)器人軌跡跟蹤控制方法共由5層結(jié)構(gòu)組成,詳情如下:
第一層:輸入層輸入u(t)。
第二層:輸入模糊化層:對u(t)實(shí)行模糊化處理,計算機(jī)器人期望軌跡和實(shí)際軌跡間的偏差角u(t)對于變量值模糊集合的隸屬度。采用高斯函數(shù)表示隸屬度函數(shù),其計算公式為:
(2)
式中,隸屬度函數(shù)中心和寬度分別用wij和cij表示。
第三層和第四層均為模糊推理層:其用于計算各條機(jī)器人移動軌跡跟蹤控制規(guī)則的適用度ak以及ak的歸一化處理,其公式分別為:
(3)
(4)
第五層為輸出層:實(shí)現(xiàn)模糊值的清晰化處理,輸出機(jī)器人移動軌跡跟蹤控制結(jié)果,其計算公式為:
(5)

4 仿真實(shí)驗(yàn)
4.1 實(shí)驗(yàn)準(zhǔn)備
為了深度驗(yàn)證所研究的變電站安防管控系統(tǒng)具體性能,利用X-CTU測試軟件針對無線傳感器網(wǎng)絡(luò)模塊下,網(wǎng)絡(luò)系統(tǒng)內(nèi)信號的傳輸準(zhǔn)確概率和無線傳感網(wǎng)絡(luò)信號強(qiáng)度進(jìn)行實(shí)驗(yàn)測試,檢測系統(tǒng)的網(wǎng)絡(luò)傳輸環(huán)境是否良好,為了保證實(shí)驗(yàn)結(jié)果真實(shí)準(zhǔn)確,延長實(shí)驗(yàn)測試周期至10 d,取實(shí)驗(yàn)測試數(shù)據(jù)的平均值作為最終結(jié)果。實(shí)驗(yàn)過程以某變電站為研究對象,系統(tǒng)在Windows 11系統(tǒng)下進(jìn)行,開發(fā)平臺為Visual Studio 2017,編程采用C++軟件,系統(tǒng)通信采用TCP/IP協(xié)議。基于機(jī)器視覺,并且為了保障實(shí)驗(yàn)過程中系統(tǒng)的效果,采用了Open CV開源計算機(jī)視覺庫和系統(tǒng)的機(jī)器視覺采集的圖像輸入視覺庫,系統(tǒng)的圖像輸出也由該視覺庫輸出實(shí)現(xiàn),并且在該過程中,將視覺圖像數(shù)據(jù)保存至Mat數(shù)據(jù)結(jié)構(gòu)。實(shí)驗(yàn)過程電腦配置為i9-12900H的CPU,內(nèi)存容量為16 GB,顯存容量為6 GB,512 G的固態(tài)硬盤,實(shí)現(xiàn)系統(tǒng)的機(jī)器視覺等硬件信息如表1所示。

表1 實(shí)驗(yàn)硬件信息
通過上述硬件設(shè)備實(shí)現(xiàn)具備機(jī)器視覺的變電站一體化安防管控系統(tǒng)功能。
4.2 系統(tǒng)功能測試
為了避免因?yàn)橄到y(tǒng)自身的因素影響實(shí)驗(yàn)結(jié)果,在開始實(shí)驗(yàn)前,測試基于機(jī)器視覺的變電站一體化安防管控系統(tǒng)的功能是否正常,在完成系統(tǒng)構(gòu)建后,測試系統(tǒng)功能的結(jié)果如表2所示。

表2 系統(tǒng)功能測試
在測試過程中,基于機(jī)器視覺的變電站一體化安防管控系統(tǒng)功能均勻運(yùn)行正常,如系統(tǒng)可以有效采集機(jī)器視覺圖像(如圖3)等,通過機(jī)器視覺可以實(shí)現(xiàn)變電站一體化安防管控。

圖3 系統(tǒng)通過機(jī)器視覺采集的圖像
4.3 結(jié)果分析
首先測試電站一體化安防管控系統(tǒng)的溫度監(jiān)測效果,如果有效監(jiān)測出了變電站存在較高的溫度,并且檢測溫度與實(shí)際溫度一致,則表明系統(tǒng)的溫度監(jiān)測效果較好,并與火電安防系統(tǒng)和三維建模系統(tǒng)進(jìn)行性能對比。實(shí)際變電站溫度較高的位置如圖4所示(設(shè)備的溫度為多個儀器測量結(jié)果的均值)。
圖4中的黑色十字為高溫位置。以圖4為基礎(chǔ),對比分析3種系統(tǒng)的溫度監(jiān)測效果,實(shí)驗(yàn)結(jié)果如圖5所示。
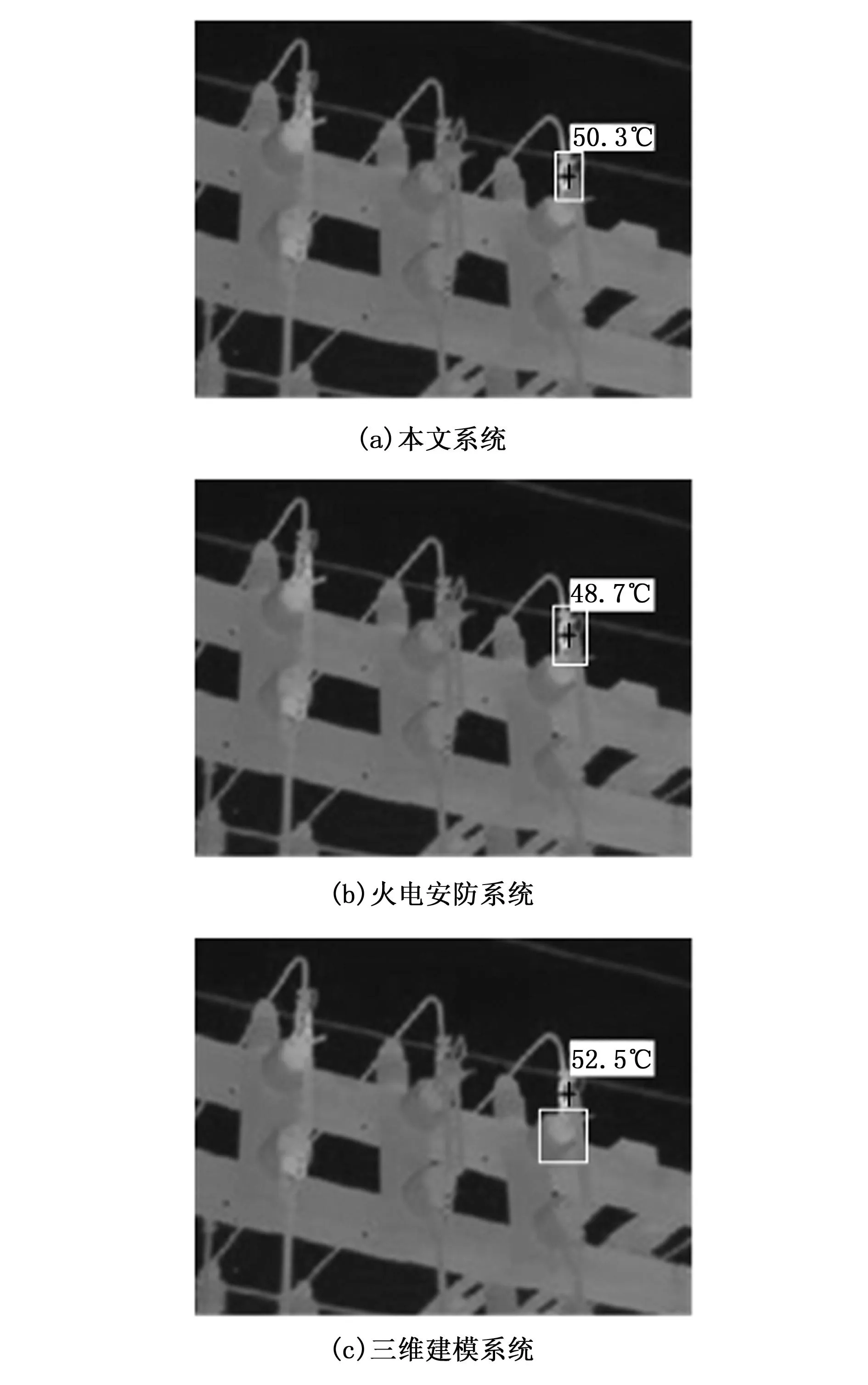
圖5 變電站溫度視覺監(jiān)測結(jié)果
通過圖5的變電站溫度監(jiān)測結(jié)果可知,本文系統(tǒng)有效準(zhǔn)確地監(jiān)測到了變電站內(nèi)溫度較高的設(shè)備位置,其監(jiān)測位置與實(shí)際位置一致,并且監(jiān)測到的溫度與實(shí)際溫度一致,均為50.3 ℃,而火電安防系統(tǒng)雖然監(jiān)測到了高溫位置,但是其監(jiān)測的溫度與實(shí)際溫度不一致,該監(jiān)測溫度僅為48.7 ℃,比實(shí)際溫度低了1.6 ℃,三維建模系統(tǒng)監(jiān)測到的高溫位置與實(shí)際位置存在一定的誤差,其監(jiān)測的位置較實(shí)際位置偏下,并且監(jiān)測的溫度較高,高出實(shí)際溫度2.2 ℃,由此可知,本文方法可有效且準(zhǔn)確監(jiān)測變電站溫度,其監(jiān)測結(jié)果的準(zhǔn)確性高于對比系統(tǒng),驗(yàn)證了本文系統(tǒng)具備更高的應(yīng)用價值。
在完成電站一體化安防管控系統(tǒng)機(jī)器視覺的溫度監(jiān)測測試后,設(shè)置無線傳感器網(wǎng)絡(luò)每個傳輸節(jié)點(diǎn)之間的固定距離為100 m,在不同的時間節(jié)點(diǎn)下測量信號強(qiáng)度和實(shí)際的傳輸準(zhǔn)確率數(shù)據(jù),具體實(shí)驗(yàn)結(jié)果如圖6所示。
從圖6中可以看出,在無線傳感器網(wǎng)絡(luò)傳輸節(jié)點(diǎn)距離固定的情況下,安防管控系統(tǒng)的信號強(qiáng)度不會隨著時間節(jié)點(diǎn)的不同而發(fā)生變化,但系統(tǒng)網(wǎng)絡(luò)信號的傳輸準(zhǔn)確率會受到不同用電時間節(jié)點(diǎn)的影響,產(chǎn)生小幅度的波動變短,但整體的安防信息傳輸準(zhǔn)確率保持在95%以上,準(zhǔn)安防信息傳輸確率較高。
為深度認(rèn)證構(gòu)建的網(wǎng)絡(luò)系統(tǒng)傳輸是否穩(wěn)定可靠,設(shè)置實(shí)驗(yàn)中網(wǎng)絡(luò)傳輸時間節(jié)點(diǎn)為5:00,設(shè)置網(wǎng)絡(luò)傳輸節(jié)點(diǎn)間的距離為變量,測試系統(tǒng)網(wǎng)絡(luò)的信號傳輸強(qiáng)度和實(shí)際傳輸準(zhǔn)確率數(shù)據(jù),繪制真實(shí)的實(shí)驗(yàn)結(jié)果成曲線,如圖7所示。
根據(jù)圖7可知,隨著系統(tǒng)無線網(wǎng)絡(luò)傳輸節(jié)點(diǎn)間在逐漸增加的過程中,安防信息信號的傳輸準(zhǔn)確率幾乎并沒有受到影響,說明網(wǎng)絡(luò)節(jié)點(diǎn)距離的設(shè)置對信號傳輸準(zhǔn)確并不造成影響,而安防信號的實(shí)際強(qiáng)度則隨著節(jié)點(diǎn)距離的增加在不斷被削弱,證明節(jié)點(diǎn)距離與安防信號的強(qiáng)弱有關(guān),綜合圖6和7的實(shí)驗(yàn)結(jié)果可以總結(jié)出,在變電站強(qiáng)電磁場環(huán)境中,系統(tǒng)的無線傳感器網(wǎng)絡(luò)可以有效、穩(wěn)定地保證安防信息的正常通信,安防信號傳輸環(huán)境可靠。
接下來實(shí)驗(yàn)選擇變電站較易發(fā)生的火災(zāi)情況進(jìn)行模擬,由于火災(zāi)發(fā)生前大多會伴隨大量的煙霧,以及周圍環(huán)境溫度的升高,因此這里主要驗(yàn)證本文研究系統(tǒng)對火災(zāi)的預(yù)警能力,并通過與火電安防系統(tǒng)和三維建模系統(tǒng)進(jìn)行性能對比,具體實(shí)驗(yàn)結(jié)果如圖8所示。

圖8 3種方法火災(zāi)預(yù)警能力對比
根據(jù)圖8可知,火電安防系統(tǒng)在火災(zāi)概率為70%時能夠觸發(fā)安防警報,三維建模系統(tǒng)的安防警報觸發(fā)條件為火災(zāi)概率在85%時,此時火災(zāi)發(fā)生的概率非常大,證明上述兩種系統(tǒng)對火災(zāi)發(fā)生的預(yù)警能力實(shí)時性和預(yù)知性較差,而本文研究的安防系統(tǒng)在火災(zāi)發(fā)生概率為50%時即可有效檢測出危險情況,并觸發(fā)警報,提醒變電站相關(guān)安全人員有效預(yù)防火災(zāi)的發(fā)生和大面積蔓延,減少損失,證明所研究系統(tǒng)的預(yù)警能力較好。
安防管理系統(tǒng)不僅要能夠有效監(jiān)測出變電站周圍的安全狀況,系統(tǒng)的響應(yīng)性能同樣重要,以免發(fā)生前端系統(tǒng)完成實(shí)時監(jiān)測,但后端處理系統(tǒng)不能有效響應(yīng)的問題,因此系統(tǒng)的反應(yīng)速度非常重要,這里對不同的安防管控系統(tǒng)后臺的響應(yīng)情況進(jìn)行一次對比實(shí)驗(yàn),通過數(shù)據(jù)模擬較常發(fā)生的安全威脅狀況,建立50個模擬實(shí)驗(yàn)數(shù)據(jù),投入模擬數(shù)據(jù)到本文研究系統(tǒng)、火電安防系統(tǒng)和三維建模系統(tǒng)中,3種系統(tǒng)的響應(yīng)耗時情況如圖9所示。

圖9 系統(tǒng)響應(yīng)耗時對比
從圖9可以看出,火電安防系統(tǒng)和三維建模系統(tǒng),隨著實(shí)驗(yàn)?zāi)M數(shù)組數(shù)量不斷增加的情況下,系統(tǒng)算法的響應(yīng)平均耗時不斷增加,且火電安防系統(tǒng)在耗時的趨勢上相對更大,本文研究的安防系統(tǒng)響應(yīng)耗時相對較短,同時耗時上漲趨勢更加平穩(wěn),系統(tǒng)的整體響應(yīng)性能更好,可以為系統(tǒng)使用者提供更好的安防管控判斷。
在上述試驗(yàn)的基礎(chǔ)上,對本文研究系統(tǒng)、火電安防系統(tǒng)和三維建模系統(tǒng)的能耗情況進(jìn)行統(tǒng)計,其結(jié)果如圖10所示。

圖10 系統(tǒng)能耗對比
從圖10可以看出,火電安防系統(tǒng)和三維建模系統(tǒng),隨著實(shí)驗(yàn)?zāi)M數(shù)組數(shù)量的不斷增加,其能耗也呈上升趨勢,而本文系統(tǒng)的能耗則使用維持在10 J以下,能耗相對穩(wěn)定。由此說明,本文研究的安防系統(tǒng)不僅響應(yīng)耗時相對較短,同時能耗較低,系統(tǒng)的整體性能更好,更具有應(yīng)用性。
5 結(jié)束語
本文利用激光圍欄作為安防系統(tǒng)前段的防御措施,通過對數(shù)據(jù)類型的高度轉(zhuǎn)換,利用機(jī)器視覺,即攝影機(jī)器監(jiān)控變電站周界,與激光圍欄相配合,達(dá)到預(yù)警和實(shí)時定位的效果,經(jīng)過實(shí)驗(yàn)證明,本文研究系統(tǒng)能夠達(dá)到系統(tǒng)網(wǎng)絡(luò)的實(shí)時信號傳輸,在無人看守情況下,系統(tǒng)準(zhǔn)確監(jiān)測到了高溫設(shè)備,同樣可以完成對危險信號的檢測和預(yù)警,系統(tǒng)響應(yīng)性能好,具有可實(shí)用性。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
電子制作(2018年8期)2018-06-26 06:43:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
電子制作(2017年8期)2017-06-05 09:36:15
現(xiàn)代工業(yè)經(jīng)濟(jì)和信息化(2016年5期)2016-05-17 05:35:57
河南電力(2015年5期)2015-06-08 06:01:45
