無人機可見光遙感影像地物目標提取技術(shù)研究
2024-02-29 04:33:50李華,李國
計算機測量與控制 2024年2期
李 華,李 國
(1.四川信息職業(yè)技術(shù)學院,四川 廣元 628000;2.成都華微電子科技股份有限公司,成都 610015)
0 引言
可見光遙感是指傳感設(shè)備工作波段保持在0.38~0.76 μm之間(可見光波段范圍)的無人機遙感技術(shù),是無人機航空測繪中最常應用的技術(shù)手段。利用可見光遙感技術(shù)能夠獲得多種影像類型,且同一類影像的一個像素可以對應多個對象,使得可見光遙感影像的質(zhì)量大幅提升[1]。相較于常規(guī)的無人機遙感技術(shù),可見光遙感對于感光膠片感色范圍的要求相對較低,只要確保膠片不出現(xiàn)過度曝光的情況,即便是在感光性極弱的情況下,也可以獲得較為清晰的遙感影像。無人機可見光遙感影像地物目標的邊界清晰度與景觀分布密切相關(guān),在景觀分布較為密集的情況下,不能保證地物目標對象邊界的清晰度。另外,傳感器在0.38~0.76 μm的波段范圍時,一部分傳感光線可能會投射在地物目標外部,使得較小地物景觀外部存在一部分的像素空缺區(qū)域,若傳感器元件的目標提取位置在此部分空缺區(qū)域時,由于像素單位的不完整,必然會出現(xiàn)模糊的邊界輪廓,導致地物目標提取難度增大,因此,研究地物目標提取技術(shù)。
孫曉宇等[2]提出基于多通道數(shù)據(jù)融合的地物目標提取方法。通過疊加和類IHS變換兩種方法,對無人機遙感RGB影像進行融合處理,聯(lián)合DeepLabv3+卷積神經(jīng)網(wǎng)絡(luò),實現(xiàn)對影像地物目標的提取。宋忠浩等[3]提出基于加權(quán)策略的高分辨率遙感圖像目標提取方法。利用加權(quán)策略改進YOLOv3遙感圖像目標檢測模型,根據(jù)圖像特征挖掘結(jié)果,確定目標的表現(xiàn)尺度條件,以便于傳感器主機能夠?qū)坝^目標進行提取。然而上述兩類方法的應用能力有限,不足以保證目標提取的清晰度。
為此,提出無人機可見光遙感影像地物目標提取方法,通過對比實驗的方式,突出該方法的實際應用能力。
1 獲取無人機可見光遙感影像特征
無人機可見光遙感影像特征包括光譜特征、紋理特征、邊緣特征三部分,分別對其進行獲取與分析。
1.1 無人機可見光遙感影像光譜特征獲取
無人機可見光遙感影像光譜特征反映出了無人機可見光遙感影像的視覺特性,由于每種地物目標對于可見光信號的感知能力不同[4],因此其均具有獨特的光譜特征。相較于紋理特征和邊緣特征,可見光遙感影像光譜特征的穩(wěn)定性更好,且在可見光照射強度保持不變的情況下,平移、旋轉(zhuǎn)、縮放等操作都不會影響像素節(jié)點的分布[5]。對于無人機上搭載的傳感器元件而言,依照光譜特征描述遙感影像中的像素節(jié)點,既可以適應可見光照射強度,又不會對像素節(jié)點的表現(xiàn)形式造成影響。
傳感器元件所繪制無人機可見光遙感影像為多光譜圖像,每一個像素節(jié)點都包含了豐富的光譜信息,除了常見的紅、黃、藍3個基礎(chǔ)波段光譜外,可見光遙感影像中還包含紫、橘、綠、黑4個過渡融合光譜,且不同光譜中的像素特征不會發(fā)生混合[6]。設(shè)紅色波段光譜內(nèi)的像素特征為X1,黃色波段光譜內(nèi)的像素特征為X2,藍色波段光譜內(nèi)的像素特征為X3,紅、藍(紫色)波段光譜的融合參數(shù)為α1,紅、黃(橘色)波段光譜的融合參數(shù)為α2,黃、藍(綠色)波段光譜的融合參數(shù)為α3,紅、黃、藍(黑色)3個波段光譜的融合參數(shù)為α4,聯(lián)立上述物理量,無人機可見光遙感影像的光譜特征如公式(1)所示:
(1)

同一幅可見光遙感影像中不會出現(xiàn)與光譜特征完全相反的地物目標,即同一幅可見光遙感影像中,q>0和q<0不可能同時成立。此外,q=0表示當前遙感影像中不存在光譜特征,不符合可見光照射下地物目標的映射規(guī)律,所以該項取值條件不可能成立。由此完成無人機可見光遙感影像光譜特征獲取。
1.2 無人機可見光遙感影像紋理特征獲取
隨著無人機可見光遙感成像技術(shù)的不斷進步,地物影像的空間和光譜分辨率會顯著提升,使得越來越多的地物細節(jié)能夠清晰呈現(xiàn)。為此,在獲取光譜特征后,需要利用紋理特征描述無人機可見光遙感影像的可視化程度。可見光遙感影像中包含了大量與地物目標相關(guān)的信息,紋理特征能夠彌補光譜信息在視覺性方面的缺失[7]。銳化處理會使得紋理特征更加明顯,提高影像地物目標的聚焦程度和清晰度,從而使得特定遙感區(qū)域的色彩更加鮮明[8]。銳化處理前、后無人機可見光遙感影像紋理特征如圖1和圖2所示。
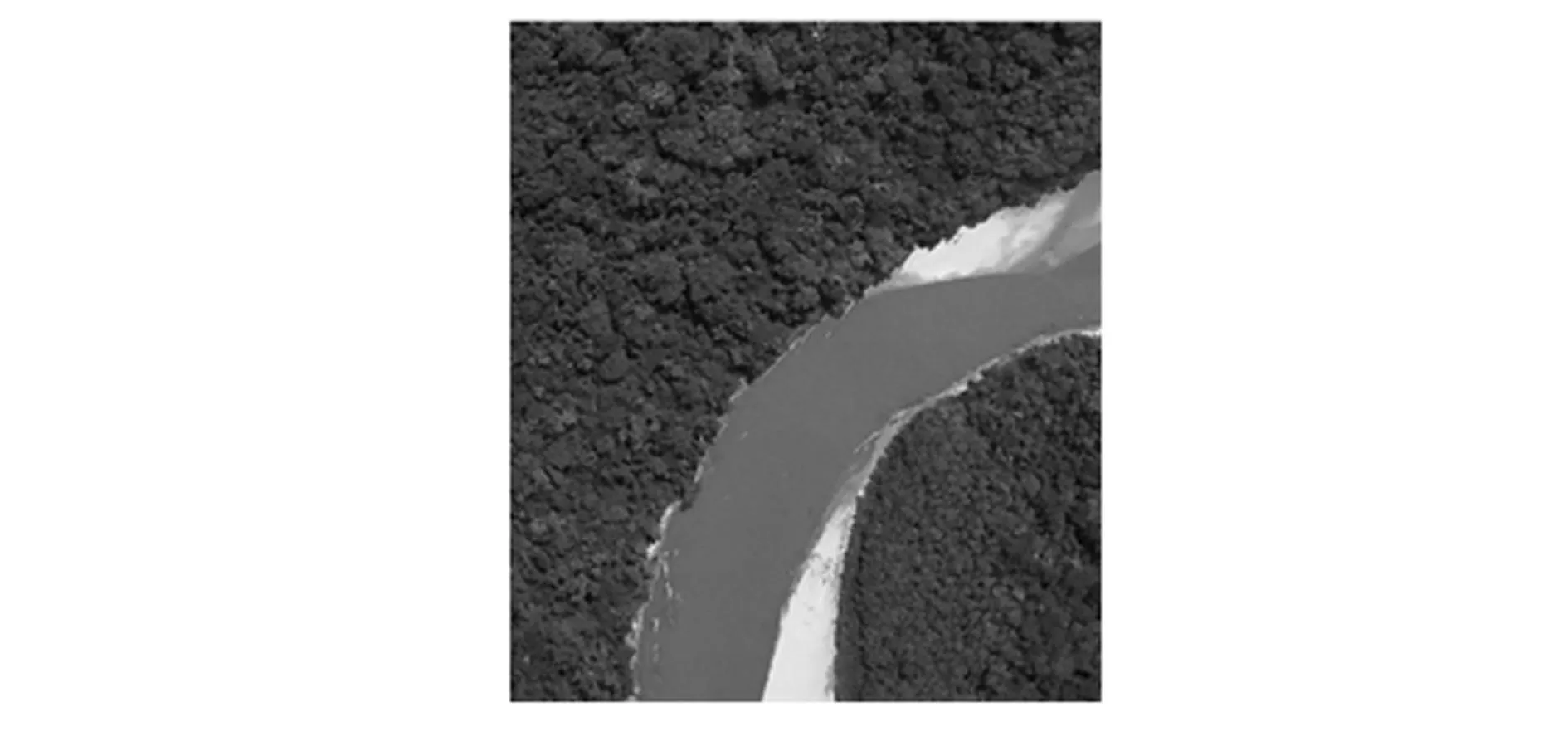
圖1 銳化處理前的無人機可見光遙感影像紋理特征
圖2 銳化處理后的無人機可見光遙感影像紋理特征

(2)
βδ的取值屬于(-∞,0)∪(0,+∞)的數(shù)值區(qū)間,其中βδ<0成立表示銳化處理后可見光遙感影像紋理特征會減弱,βδ>0成立時,表示銳化處理后可見光遙感影像紋理特征會更加明顯。為此,在進行紋理特征求解時,βδ的取值只能屬于(0,+∞)的數(shù)值區(qū)間,完成無人機可見光遙感影像紋理特征獲取。
1.3 無人機可見光遙感影像邊緣特征獲取
無人機可見光遙感影像紋理特征能夠提高地物目標清晰度,因為邊緣為整幅影像中地物目標信息最為集中的區(qū)域,所以獲取邊緣特征,進一步提高清晰度。邊緣特征是無人機可見光遙感影像中最重要的特征,因為影像邊緣在保留重要像素信息的同時,減少了地物目標相關(guān)像素對象總量,所以即便是在節(jié)點數(shù)量相對較少的情況下,只要保證像素信息之間不發(fā)生相互覆蓋,就可以實現(xiàn)無人機可見光遙感影像邊緣特征的確切分析。無人機可見光遙感的視覺理論認為邊緣是傳感器感知地物目標的重要信息,在遙感影像中,邊緣只存在地物目標的主題信息交界處[9],能夠反映出像素類項之間的信息突變關(guān)系,是整幅影像中地物目標信息最為集中的區(qū)域。
無人機可見光遙感影像邊緣特征的求解如公式(3)所示:
(3)

在獲取無人機可見光遙感影像邊緣特征時,傳感器元件對于邊緣區(qū)域內(nèi)地物目標像素點的提取必須遵循如下條件:
1)同一地物目標周圍不能同時存在多種不同類型的邊緣像素點,且每一個提取周期內(nèi),傳感器元件只針對一種類型的像素對象進行取樣。
2)如果邊緣區(qū)域過大,傳感器元件在一個提取周期內(nèi)[10],無法實現(xiàn)對所涉及像素對象的完全取樣,在選取地物目標時,應該適當縮小原圖像中相鄰像素點之間的比例關(guān)系,從而使得遙感影像呈現(xiàn)更密集的表現(xiàn)狀態(tài)。
3)除特殊情況外,傳感器元件在提取無人機可見光遙感影像地物目標時,只選擇一個邊緣區(qū)域作為像素點取樣范圍。
在上述條件下,u<0表示像素信息之間相互覆蓋,u≥0表示像素信息之間相互獨立,邊緣特征明顯。為此,在進行紋理特征求解時,β的取值只能屬于[0,+∞)的數(shù)值區(qū)間,完成無人機可見光遙感影像紋理特征獲取。
2 基于影像特征的無人機可見光遙感影像地物目標提取
在同一遙感影像區(qū)域內(nèi),獲取了無人機可見光遙感影像光譜特征、紋理特征與邊緣特征3種特征后,由于這些特征的分布形式受到可見光照射強度的直接影響[11],導致在提取地物目標過程中,易出現(xiàn)分布不均的情況。為此,需要對無人機可見光遙感影像數(shù)據(jù)集實行增廣處理,保證地物目標特征分布均勻,得到較為清晰的地物目標。按照影像編碼標簽定義條件,計算地物目標的增強權(quán)重,從而在參量化處理光譜參量的同時,確定光譜吸收指數(shù)的取值范圍,實現(xiàn)對影像地物目標的提取。
2.1 無人機可見光遙感影像數(shù)據(jù)集增廣
在無人機可見光遙感影像中,一個地物目標通過線性變換達到另一個目標的平移行為稱為數(shù)據(jù)集增廣,在遙感像素點保持均勻分布的情況下,數(shù)據(jù)集增廣包括尺度旋轉(zhuǎn)、平移、旋轉(zhuǎn)、變換等多種操作行為。原始遙感影像數(shù)據(jù)集中,地物目標像素點的分布越密集,表示無人機可見光的照射強度越大,在此區(qū)域內(nèi)完成數(shù)據(jù)集增廣,應保證所提取地物目標的唯一性。
(4)
E1,E2,…,En∈
(5)
設(shè)i1,i2,…,in分別表示與地物目標像素節(jié)點匹配的遙感影像數(shù)據(jù)增廣向量,其取值屬于(-∞,0)∪(0,+∞)的數(shù)值區(qū)間,φ表示數(shù)據(jù)集內(nèi)的地物目標像素節(jié)點關(guān)聯(lián)參數(shù)[12],的增廣表達式如公式(6)所示:
(6)
跨遙感區(qū)域情況下,無人機可見光遙感影像特征不有意義,且不同遙感區(qū)域內(nèi)的地物目標像素特征并無明顯相關(guān)性,只能在單一遙感區(qū)域內(nèi)完成對地物目標提取,由此完成無人機可見光遙感影像數(shù)據(jù)集增廣。
2.2 無人機可見光遙感影像編碼標簽定義
完成增廣后的無人機可見光遙感影像數(shù)據(jù)集內(nèi)一個像素節(jié)點可以同時與多個影像編碼標簽保持對應關(guān)系,但一個標簽只能對應一個地物目標,且影像編碼標簽對于地物目標的提取速率始終大于遙感影像數(shù)據(jù)集內(nèi)的像素節(jié)點識別速率,因此定義影像編碼標簽,實現(xiàn)標簽與目標的一一對應。影像編碼標簽是針對遙感影像數(shù)據(jù)集增廣處理條件的地物目標提取原則。一幅完整的無人機可見光遙感影像中,地物目標節(jié)點分布行為不受遙感區(qū)域劃分條件的影響,每一遙感區(qū)域內(nèi),地物目標節(jié)點的數(shù)量不固定[13]。觀察像素節(jié)點的分布和特征,定義影像編碼標簽。由于每一個影像編碼標簽必須同時識別所有類型的遙感影像數(shù)據(jù),因此在定義編碼標簽時,必須在完成影像數(shù)據(jù)集增廣后,進行無差別取樣[14]。無人機可見光遙感影像編碼標簽定義原則如圖3所示。
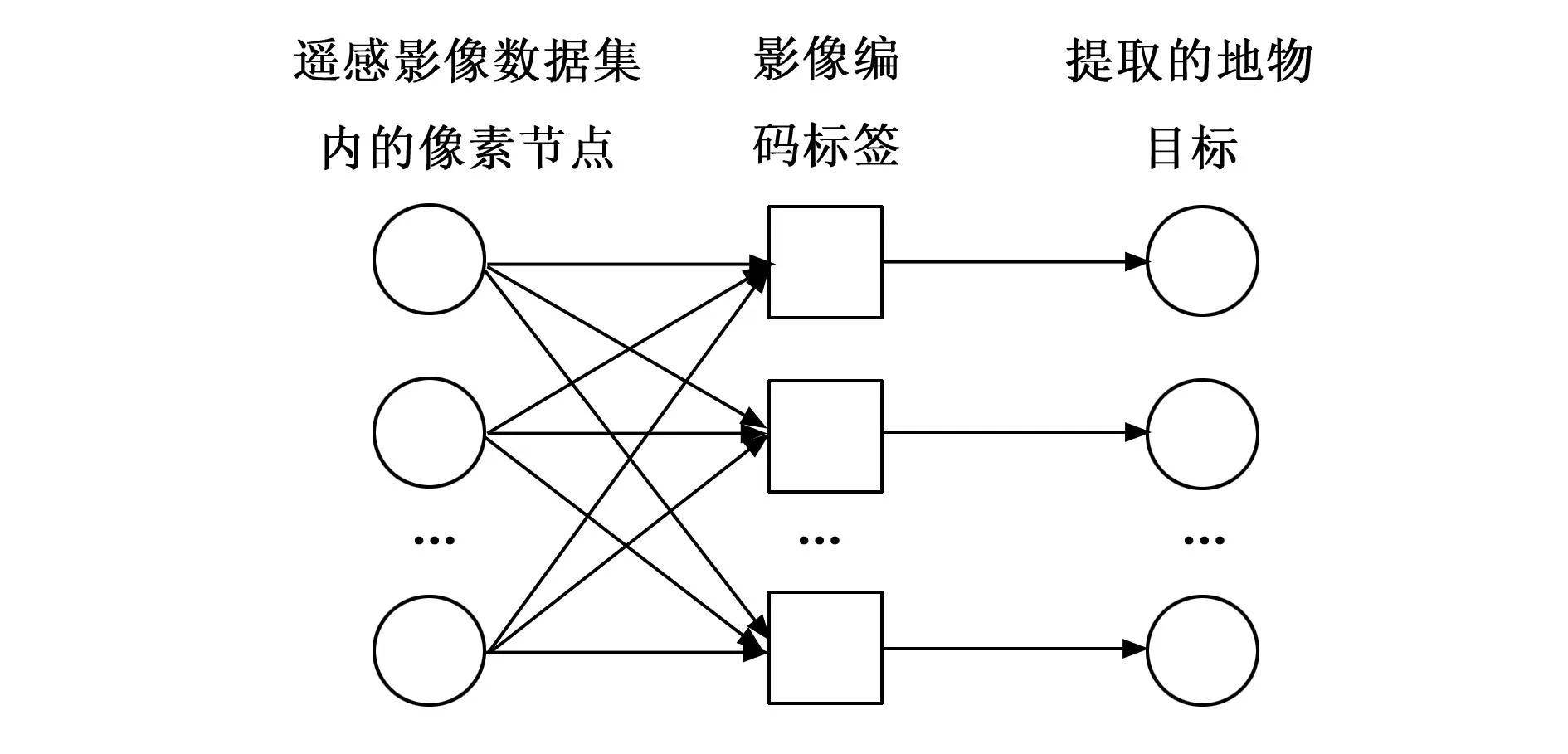
圖3 無人機可見光遙感影像編碼標簽定義原則
(7)
影像編碼標簽影響傳感器元件對地物目標的處理能力,因此保證單位遙感區(qū)域內(nèi)所包含地物目標數(shù)量必須滿足傳感器元件的實際取樣需求,實現(xiàn)無人機可見光遙感影像編碼標簽定義。
2.3 無人機可見光遙感影像地物目標增強權(quán)重確定
每一類影像編碼標簽對應的地物目標提取需求不同,為此,針對具體影像標簽確定地物目標增強權(quán)重取值范圍。增強權(quán)重是指地物目標像素在無人機可見光遙感影像中的放大能力,一般來說,取值越大表示單位遙感區(qū)域的覆蓋面積越大。像素分布密集區(qū)域內(nèi)地物目標邊界絕對清晰是指該區(qū)域內(nèi)地物目標增強權(quán)重的計算值大于“1”[15-16],在已知編碼標簽定義的前提下,多次訓練耦合值向量,消除像素損失行為,確保像素節(jié)點與地物目標提取結(jié)果為一一對應。
設(shè)無人機可見光遙感影像地物目標的耦合值向量為d,像素信息訓練效率為η,聯(lián)立公式(7),將耦合值向量訓練過程表達式定義為:
(8)

每一個無人機可見光遙感影像區(qū)域都是一個完整的像素區(qū)間,且每一區(qū)域內(nèi)都不存在大范圍堆積的空白像素點,所以在計算地物目標增強權(quán)重指標時,要求影像編碼標簽只能對應同一類目標像素信息。為此,利用式(8)獲取無人機可見光遙感影像地物目標增強權(quán)重如式(9)所示:
(9)

2.4 無人機可見光遙感影像地物目標光譜參量化
增強權(quán)重能夠提高地物目標的提取效果,為了提高增強權(quán)重對于地物目標提取的適應性,對無人機可見光遙感影像地物目標光譜進行參量化處理。無人機可見光遙感影像光譜參量化利用了光譜分辨率分析原則,光譜分辨率分析是指傳感器元件在單位時間內(nèi)可以采集到大量的連續(xù)影像數(shù)據(jù),且在可見光照射下表現(xiàn)為同步狀態(tài),每一個像素對象的輻射照度與空間光譜成分完全相同[17-18]。在單位遙感區(qū)域內(nèi),可見光光譜為每個像素節(jié)點提供數(shù)十個甚至數(shù)百個光譜參量,且這些參量首尾順次連接可以形成一條完整的光譜曲線,地物目標光譜的參量化處理是在光譜曲線內(nèi)完成地物目標標定與按需處理。
設(shè)基于地物目標增強權(quán)重選取的無人機可見光輻射照度為μ,且其取值恒屬于[1,+∞)的數(shù)值區(qū)間,地物目標光譜參量為jμ,地物目標光譜參量的初始值為j0,與光譜參量jμ相關(guān)的遙感影像連續(xù)性表現(xiàn)參數(shù)為kμ,與光譜參量j0相關(guān)的遙感影像連續(xù)性表現(xiàn)參數(shù)為k0,光譜參量化度量系數(shù)為λ,聯(lián)立公式(9),地物目標光譜參量化處理表達式為:
(10)
同一遙感區(qū)域內(nèi),地物目標所在節(jié)點與核心遙感目標節(jié)點的間隔距離越遠,J值越大。如果兩個地物目標節(jié)點的像素等級相同且間隔距離極近,那么J值相對較小。
2.5 無人機可見光遙感影像地物目標光譜吸收指數(shù)計算
光譜參量化處理將無人機可見光遙感影像原始光譜數(shù)據(jù)轉(zhuǎn)化為具有實際物理意義的光譜參數(shù)。光譜吸收指數(shù)是指地物目標在光譜帶內(nèi)的像素反射強度與無人機可見光反射強度之間的比值,用于描述地物目標對不同波段的光譜吸收情況。其取值滿足光譜解混條件,即不同地物目標光譜曲線的波峰波谷形狀、寬度、深度、位置和對稱度等屬性均存在差異[19-21]。由于無人機可見光遙感光線具有不可逆的特性,每個像素信息只代表一次照射的可見光反射強度,因此,需要控制光譜吸收指數(shù)完成地物目標的提取。
光譜吸收指數(shù)的表達式如公式(11)所示:
(11)
其中:zmax表示無人機可見光遙感光照度的最大取值,zmin表示可見光遙感光照度的最小取值,ρ表示地物目標像素在同一直線上的分布密度,ν表示參考光譜參量化處理條件的目標像素光譜反射參量。由于地物目標位置會影響地物目標提取,因此必須在同一直線上計算光譜吸收指數(shù)。
2.6 地物目標提取
計算光譜吸收指數(shù)后,需要對其再次模擬,獲得最優(yōu)解,實現(xiàn)無人機可見光遙感影像地物目標提取。光譜吸收指數(shù)模擬是根據(jù)數(shù)值模擬條件[22-23],判斷最優(yōu)解參數(shù)的取值范圍,從而在獲得地物目標提取結(jié)果的同時,完成像素信息篩選。地物目標提取需要保障目標節(jié)點邊界的完整性與清晰性,為此,必須保證地物目標的關(guān)聯(lián)性排列狀態(tài)。
無人機可見光遙感影像地物目標的提取如式(12)所示:
(12)

3 實例分析
為驗證所提方法的應用性能,將其與文獻[2]方法(基于多通道數(shù)據(jù)融合的地物目標提取方法)和文獻[3]方法(基于加權(quán)策略的高分辨率遙感圖像目標提取方法)進行對比。
3.1 實驗準備
實驗區(qū)域位于M省的中心地帶,北邊為山區(qū)地帶、西邊為縱橫的沙土道路,地上建筑不超過3層、地下建筑不超過2層,用地面積約為63 580 m2,總建筑面積約為70 170 m2,正負零相對于地平面的絕對高程為5.1 m。利用大疆經(jīng)緯M30T航拍無人機搭載Ultris 20 series 高光譜光場成像儀對該區(qū)域進行航拍攝影,由于地上建筑、地下建筑、縱橫道路在遙感圖像中的像素水平相差較大,因此遙感影像中地物景觀的色度差也較大,在開始實驗之前,通過Pixelmash軟件,對所得遙感影像進行像素平均處理,如圖4所示。
通常情況下,地上建筑、地下建筑在遙感影像中的像素水平高,與之相關(guān)的地物景觀顏色相對較深,縱橫道路的像素水平低,遙感影像中色度指標取值相對較小。像素平均處理是通過劃分關(guān)聯(lián)區(qū)域的方式,將過深或過淺的像素節(jié)點融合在一起,從而使得整幅無人機可見光遙感影像更加均勻。
3.2 實驗流程
地物目標邊界的清晰度能夠反映出傳感器元件對無人機可見光遙感影像地物目標的提取能力,為此需要保障目標邊界的清晰度以實現(xiàn)地物目標提取。本次實驗根據(jù)外部區(qū)域與地物目標之間的像素差值判斷傳感器元件提取到的地物目標的邊界是否為清晰化狀態(tài)。在遙感圖像區(qū)域等大的情況下,待識別的地物目標越少,傳感器元件提取的地物目標邊界越清晰。
本次實驗的具體流程為:
1)完成對無人機可見光遙感影像像素的平均處理,確保影像中不存在像素差的情況下開始實驗。
2)應用所提方法完成對影像中地物目標提取,分別記錄外部區(qū)域與地物目標的具體像素值,所得結(jié)果為實驗組參數(shù)。
3)應用文獻[2]方法提取影像地物目標,分別記錄外部區(qū)域與地物目標的具體像素值,所得結(jié)果為A對照組參數(shù)。
4)應用文獻[3]方法提取影像地物目標,分別記錄外部區(qū)域與地物目標的具體像素值,所得結(jié)果為B對照組參數(shù)。
5)根據(jù)實驗組、A對照組、B對照組的像素差,分析所提方法在保障地物目標邊界清晰度方面的應用能力。
3.3 數(shù)據(jù)處理
不同方法的外部區(qū)域與地物目標像素差如圖5所示。
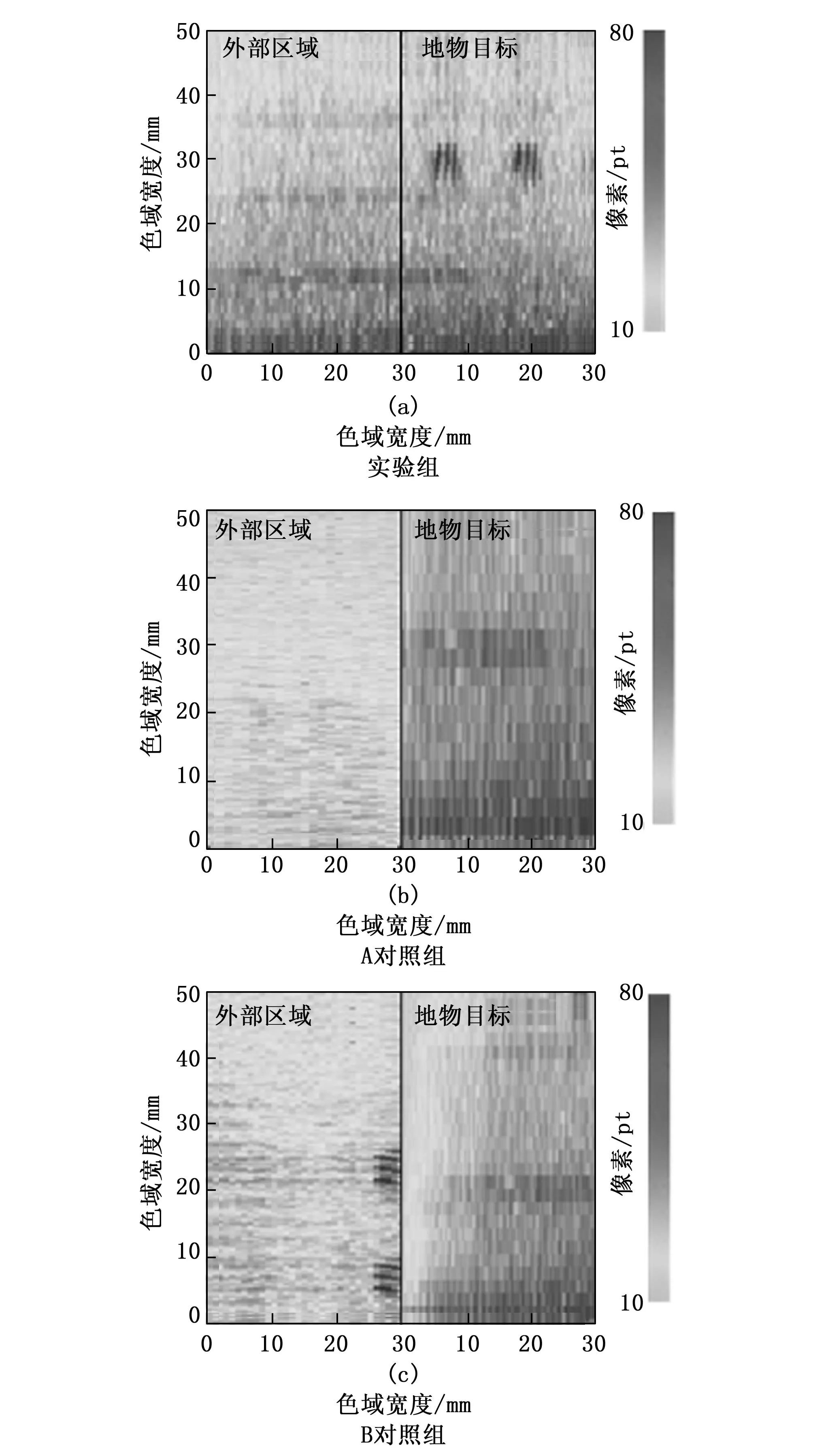
圖5 不同方法的外部區(qū)域與地物目標像素差
分析圖5可知,A對照組地物目標的像素水平較高,而外部區(qū)域的像素水平較低,二者之間的像素差較大。B對照組外部區(qū)域與地物目標之間的像素差變化規(guī)律與A對照組類似,二類像素之間的差值水平也相對較大。而實驗組外部區(qū)域與地物目標之間的像素差水平較低,越接近邊緣區(qū)域處的像素均值越高,越遠離邊緣區(qū)域處的像素均值越低,且外部區(qū)域、地物目標的遙感像素數(shù)值水平并無明顯差異性,說明所提方法能夠提高無人機可見光遙感影像地物目標地物目標邊界的清晰度,地物目標提取能力較強。
3.4 實驗結(jié)論
綜上可知本次實驗結(jié)論為:
1)應用文獻[2]方法和文獻[3]方法時,無法將外部區(qū)域與地物目標之間的像素差控制在較低的數(shù)值狀態(tài)。
2)應用所提方法能夠提高解決遙感影像地物目標邊界清晰度,而地物目標邊界的清晰度能夠反映無人機可見光遙感影像地物目標提取能力,說明所提方法的地物目標提取能力較強。
4 結(jié)束語
本文提出了無人機可見光遙感影像地物目標提取方法。分析遙感影像特征,根據(jù)影像編碼標簽定義條件,確定光譜吸收指數(shù)的取值范圍,實現(xiàn)對地物目標的準確提取。所提方法可以有效控制外部區(qū)域、地物目標像素差的數(shù)值水平,避免目標像素點集中分布,保證了地物目標邊界的清晰度,具有較強的地物目標提取能力。
猜你喜歡
數(shù)學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
發(fā)明與創(chuàng)新·小學生(2021年3期)2021-03-25 11:48:49
世界科學技術(shù)-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
