基于實船冰區(qū)加速度監(jiān)測的破冰顛震識別與分析
2024-03-01 06:05:24丁仕風(fēng)
船舶 2024年1期
馬 群 李 放 崔 濛 高 處 周 利 丁仕風(fēng)
(1. 江蘇科技大學(xué) 船舶與海洋工程學(xué)院 鎮(zhèn)江 212003; 2. 上海交通大學(xué) 船舶海洋與建筑工程學(xué)院 上海 200240;3. 中國船舶及海洋工程設(shè)計研究院 上海 200011)
0 引 言
隨著對極地的不斷探索,極地航線日益繁忙,極地地區(qū)蘊(yùn)藏的豐富戰(zhàn)略資源也被不斷發(fā)掘。極地考察船作為探索極地的重要裝備,已經(jīng)成為各國研發(fā)的熱門船型。極地考察船在航行過程中會不斷與海冰發(fā)生接觸(包括碰撞、擠壓、摩擦等)。在冰載荷作用下,船體發(fā)生運(yùn)動和振動響應(yīng),對船舶結(jié)構(gòu)安全和船載設(shè)備運(yùn)行性能均產(chǎn)生重要影響。有別于局部范圍內(nèi)的結(jié)構(gòu)振動,本文將船體在冰區(qū)航行時發(fā)生的全局性垂向運(yùn)動和振動響應(yīng)統(tǒng)稱為破冰顛震。此類響應(yīng)對于船載設(shè)備的正常工作具有較大影響,可能導(dǎo)致緊固件松動、運(yùn)動部件阻塞、光學(xué)設(shè)備偏移及其他各類問題。顛震關(guān)鍵參數(shù)的確定在極地考察船的設(shè)計和運(yùn)營中具有重要意義。
加速度測量在研究船舶運(yùn)動和振動方面起著重要作用。通過測量船舶在不同方向上的加速度,可以了解船體在破冰過程中的動態(tài)響應(yīng),從而優(yōu)化設(shè)計、改進(jìn)船舶性能。目前對于船舶加速度測量結(jié)果主要通過傅里葉變換、短時傅里葉變換(short-time Fourier transform, STFT)、小波變換和Wigner-Ville分布等方法進(jìn)行分析,而目前對于船舶加速度的分析研究則主要針對船舶在波浪中的加速度數(shù)據(jù)。KIM 等[1]利用Morlet 小波在不同尺度上的相互關(guān)聯(lián),從時域船體響應(yīng)測量中提取顫振響應(yīng),用于區(qū)分柔性船舶自由衰減的振動屬性。OMER 等[2]在船體中放置加速度傳感器,利用STFT 生成時頻圖,將波浪砰擊以線性特征展現(xiàn)。JESSLYN 等[3]利用小波變換簡化時頻圖,通過檢測閾值的方法識別波浪砰擊次數(shù)。DESSI 等[4]利用機(jī)器學(xué)習(xí)模型識別和提取傳感器數(shù)據(jù)中撞擊的時長。WANG 等[5]利用STFT 和小波對非平穩(wěn)脈沖特征和變速工況下的振動與噪聲進(jìn)行分析,識別非穩(wěn)定脈沖信號中的異常點(diǎn)。破冰過程中的顛震與船舶在波浪砰擊的響應(yīng)具有相似的特征,均會引起全局性的運(yùn)動和振動響應(yīng)。BELOV等[6]利用小波變換對時序的冰載荷進(jìn)行拆分,提出了加速度信號在不同頻段對應(yīng)的激勵源劃分。YUE等[7]利用STFT 在時域和頻域中分析了導(dǎo)致結(jié)構(gòu)產(chǎn)生振動的冰力。HEYN 等[8]利用Wigner-Ville 分布法分析了Frej 號破冰船北極水域航行期間收集的加速度數(shù)據(jù),證明了振動的激勵頻率與主要破冰機(jī)制、船舶與冰碰撞的速度,以及相互作用位置有關(guān),而且船的固有頻率也會因其周圍海冰狀況的變化而略有改變。該項研究證明了船上的分布式加速度計可以為監(jiān)測系統(tǒng)提供有關(guān)冰封水域作業(yè)中的破冰機(jī)制、周圍冰情及船體與冰相互作用位置的額外信息,從而為冰區(qū)水域作業(yè)提供了一個有效的監(jiān)控工具。
然而,以上研究均是針對特定船-冰接觸事件所開展的加速度頻域分析,未針對顛震進(jìn)行研究和量化,在給定加速度測量信號的情況下,仍缺少能夠自動、快速識別顛震事件的有效方法,對于不同冰況和航行狀況下的顛震量化研究也相對缺乏。
本文對“雪龍2”號多個測點(diǎn)的加速度數(shù)據(jù)進(jìn)行分析和判斷,利用隨船海冰圖像和GPS 信號,篩選具有典型性的數(shù)據(jù)進(jìn)行后續(xù)分析和識別;利用STFT等方法,得出加速度信號的時頻圖。在此基礎(chǔ)上,提出一種改進(jìn)的單點(diǎn)目標(biāo)檢測(single shot multibox detector, SSD)模型對破冰顛震自動識別,進(jìn)而分析破冰顛震事件,提取不同冰況條件下的顛震關(guān)鍵特征,探究不同冰況和航速下對顛震關(guān)鍵參數(shù)的影響。
1 分布式加速度測量
1.1 原型測量數(shù)據(jù)
本文所用數(shù)據(jù)來自“雪龍2”號極地考察破冰船于2019-2023 年南北極航行期間在冰區(qū)航行時隨船測量的加速度。“雪龍2”號極地考察船目前共安裝了8 個加速度測量點(diǎn),分布在船舶的各個位置,具體布置如表1 所示。

表1 加速度測點(diǎn)位置
加速度傳感器分布情況見圖1。“雪龍2”號船體監(jiān)測系統(tǒng)原有加速度測點(diǎn)為5 ~ 8,采樣頻率為150 Hz,布置位置見圖1(a);2022 年后,“雪龍2”號又新加裝測點(diǎn)1 ~ 4,采樣頻率為200 Hz,布置位置見圖1(b)。本文所分析的數(shù)據(jù)均來自于原有測點(diǎn)。
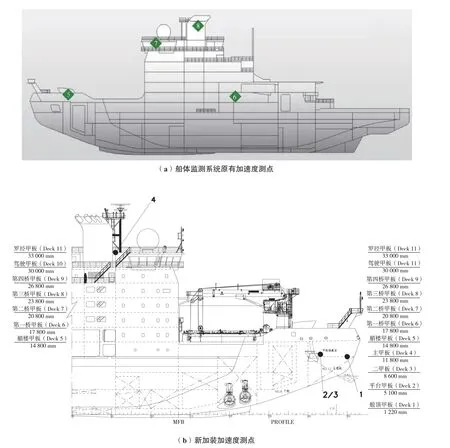
圖1 加速度傳感器分布情況
此外,船上配備多臺攝像機(jī)進(jìn)行海冰冰況觀測,并通過GPS 對船舶航速和航跡進(jìn)行記錄,所收集的數(shù)據(jù)信息主要包括時間、三自由度加速度、對地航向、對地航速、經(jīng)度、緯度和隨船海冰圖像等。
圖2 為某時段內(nèi)船首和船舯各測點(diǎn)位置處的加速度信號對比。總體來看,船首部位所受環(huán)境載荷(尤其是冰載荷)影響較大,易于識別;相對而言,船舯部位的數(shù)據(jù)加速度幅值則較小。測點(diǎn)6、7 處的加速度幅值較相似,而測點(diǎn)8 處雖然在沿船長位置上與測點(diǎn)6、7 相似,但加速度量級與測點(diǎn)5 相似,由此可推斷測點(diǎn)8 處船體局部振動響應(yīng)較大。因此在本文后續(xù)分析中,選擇測點(diǎn)5、7 進(jìn)行研究。
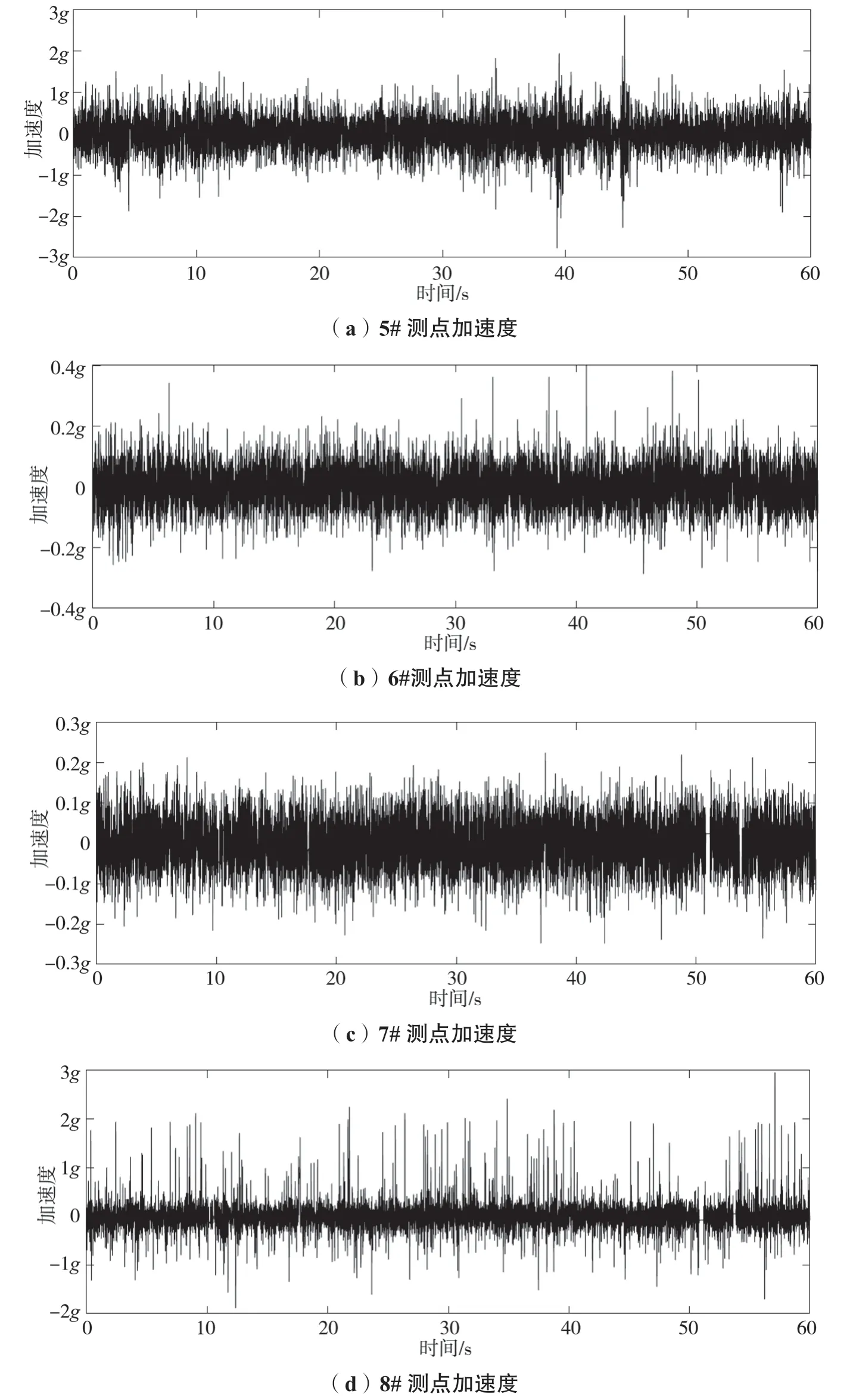
圖2 “雪龍2”號垂向加速度
1.2 數(shù)據(jù)篩選
為了較全面地覆蓋海冰冰況和航行狀況,需要從大量實測數(shù)據(jù)中篩選典型案例。本文利用隨船海冰圖像進(jìn)行冰厚和海冰密集度識別,并借助GPS信號確定船舶的航速。為保證所選案例具備典型性,需選擇冰況和船速相對穩(wěn)定的時段,以5 ~ 15 min為1 組典型案例。根據(jù)冰況和航速,篩選出16 組典型案例,參見表2。
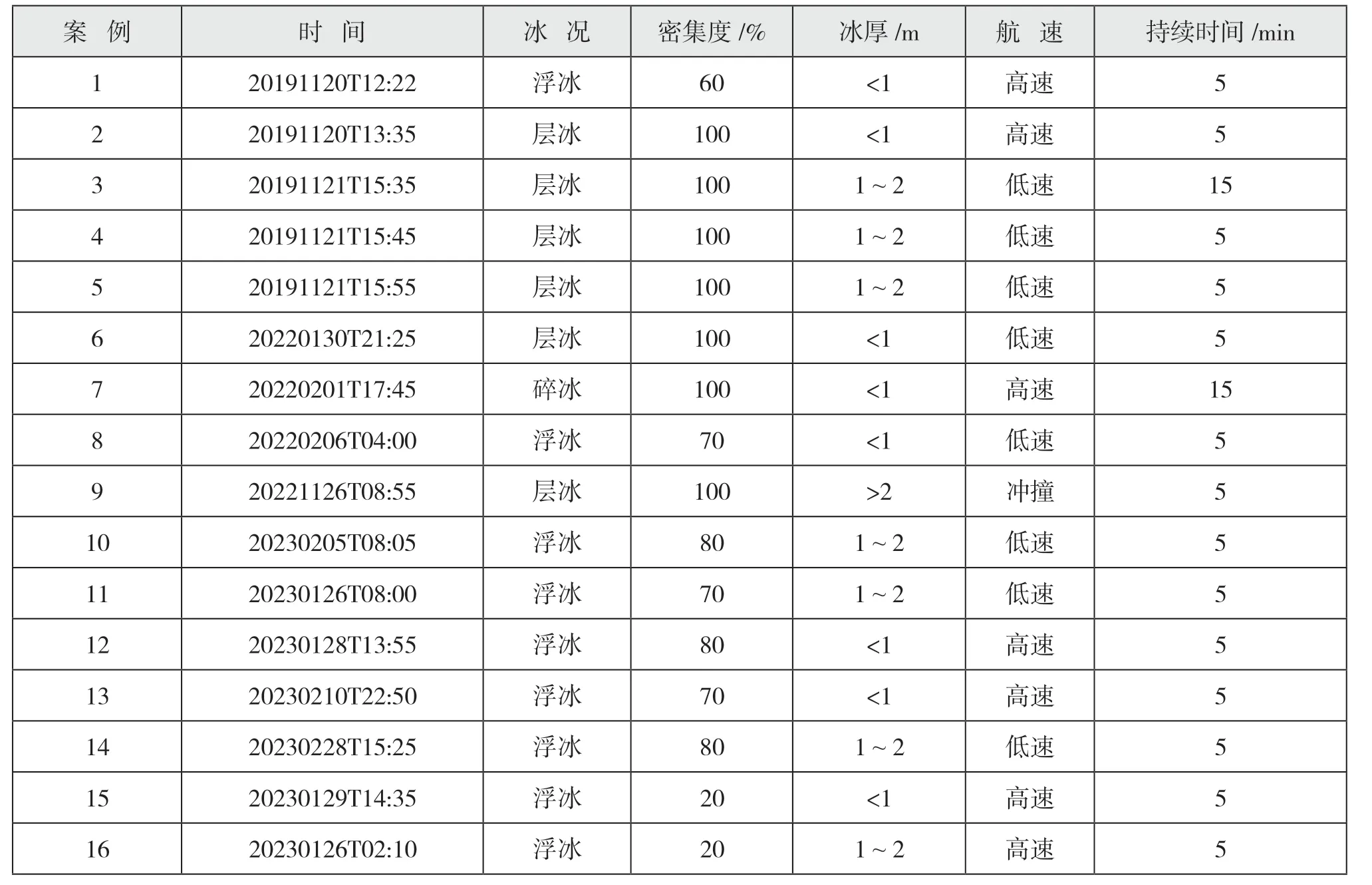
表2 典型案例
冰況主要分為浮冰和層冰(參見圖3),分析過程中,還加入1 組碎冰航道進(jìn)行對比,船速以5 kn 為界限劃分為低速和高速,后續(xù)破冰顛震分析將以基于這些數(shù)據(jù)來開展。作為對比,在分析中加入了1 個沖撞破冰案例。這種情況下的航速在短時間內(nèi)變化較大,因此在表2 中并不對航速進(jìn)行定義。
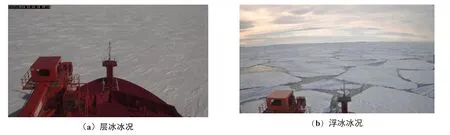
圖3 層冰和浮冰冰況下的實拍照片
2 破冰顛震識別與分析方法
2.1 加速度測量信號預(yù)處理
利用小波濾波的方法,可以在去除噪聲的同時,較完整地保留數(shù)據(jù)特征,從而為后續(xù)的數(shù)據(jù)分析提供基礎(chǔ)。小波濾波的原理是將原始信號分解成不同頻率的子信號,通過選取1 個合適的閥值,將大于閥值的小波系數(shù)視作有信號產(chǎn)生且應(yīng)予以保留,而后將濾波后的子信號合并,并最終得到濾波后的信號。信號經(jīng)小波分解后,可使小波系數(shù)變得較大。因噪聲的小波系數(shù)較小,故本文選用小波閾值,去除低于閾值的小波并進(jìn)行濾波,得到如圖4 所示結(jié)構(gòu)[10]。

圖4 小波濾波結(jié)構(gòu)圖
本文使用Daubechies 4 小波基函數(shù),實現(xiàn)信號去噪,小波濾波后的效果如圖5 所示。

圖5 小波濾波效果
2.2 加速度時頻分析
為分析極地船舶破冰顛震特性,本項研究采用STFT 方法,對不同測點(diǎn)處所測得的垂向加速度信號進(jìn)行深入分析,提取出破冰顛震的特征。
STFT 是一種將信號分解成時間和頻率2 個維度的方法,它將信號分成若干個時間段,對每個時間段進(jìn)行傅里葉變換,得到該時間段內(nèi)信號的頻率分布情況。這樣可以得到信號在時間和頻率上的變化情況,從而分析信號的時頻特性。
當(dāng)下,現(xiàn)實主義創(chuàng)作并沒有完結(jié),現(xiàn)實主義創(chuàng)作道路還有很長的路要走。幾十年來,現(xiàn)實主義創(chuàng)作經(jīng)歷了風(fēng)雨洗禮和各種思想運(yùn)動的考驗,已經(jīng)成為代表中華民族國情的文藝創(chuàng)作主流形式,取得了豐碩的藝術(shù)成果——經(jīng)驗和成就同步前進(jìn),堅守和開拓并存發(fā)展。
本文將STFT 的窗口長度設(shè)為0.5 s,為更加清楚地展示每個時間段之間幅值的區(qū)別,先將窗口的重疊長度設(shè)為0.2 s,所得到的時頻圖如下頁圖6所示。其中能量密度越高則顏色更深。
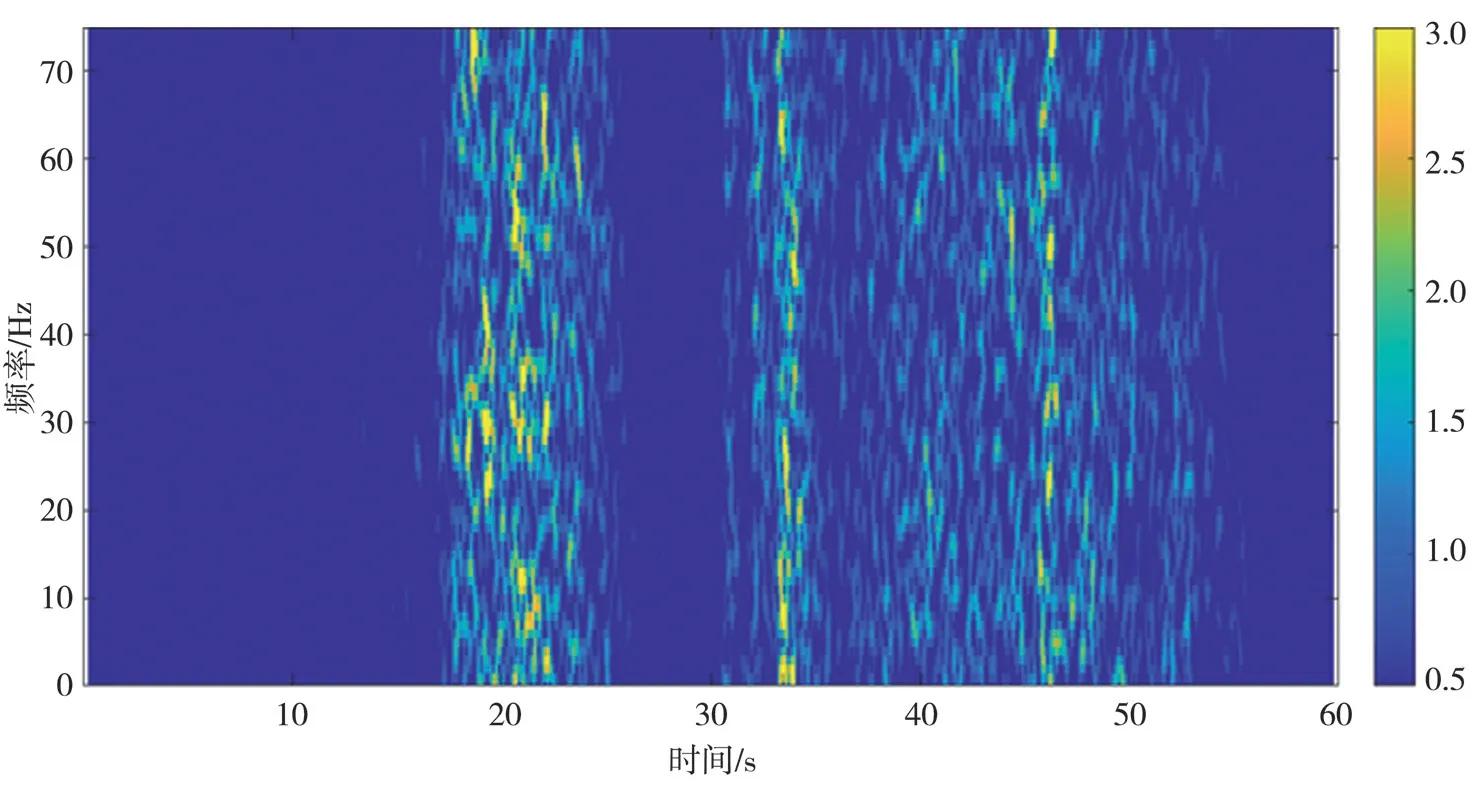
圖6 STFT 變換后的時頻圖
從圖6 中可以看出,破冰情況下加速度時頻圖上呈現(xiàn)線狀特征,即在激勵下產(chǎn)生寬頻的振動響應(yīng),進(jìn)而產(chǎn)生周期性的能量集中,如30 s 左右在頻域上的分布和變化。本研究將基于這一觀察,通過圖像處理使線狀特征更加突顯,從而基于圖像識別實現(xiàn)破冰顛震的自動識別。
將時頻圖的y軸縮放到0 ~ 10 Hz,并固定顏色軸范圍,優(yōu)化后的圖像見下頁圖7。經(jīng)過優(yōu)化后,破冰顛震在時頻圖上的線狀分布特征更加明顯,便于自動識別。
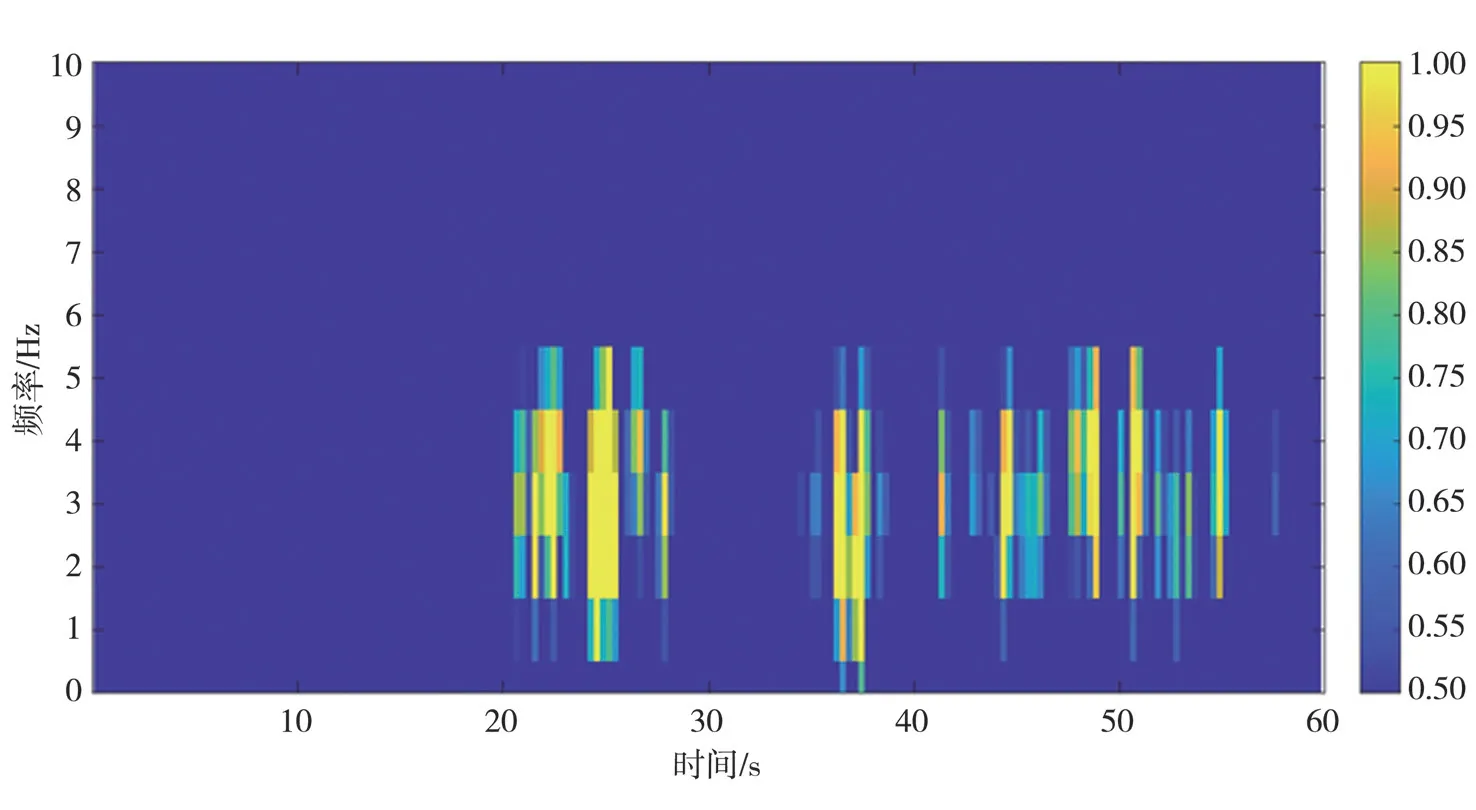
圖7 優(yōu)化后的時頻圖
2.3 顛震自動識別
通過短時傅里葉變換將原本的一維加速度信號轉(zhuǎn)化為二維圖像,本文利用圖像識別算法對垂向加速度信號中的顛震進(jìn)行自動識別。SSD 是目前主流的圖像識別網(wǎng)絡(luò),其原理是均勻地在圖片不同位置進(jìn)行密集抽樣,利用卷積神經(jīng)網(wǎng)絡(luò)提取特征,并進(jìn)行分類回歸。其識別速度快,可以滿足實時顛震識別的需求[11],但數(shù)據(jù)集需求較多,模型準(zhǔn)確率稍低。雖然SSD 算法在傳統(tǒng)數(shù)據(jù)集上表現(xiàn)優(yōu)異,但因其設(shè)計主要致力于小目標(biāo)檢測,且相對較低的層數(shù)可能導(dǎo)致特征提取不足[12]。
基于深度卷積和點(diǎn)卷積框架的MobileNetV2 網(wǎng)絡(luò)可解決SSD 模型在特征提取上的不足,從而顯著降低計算復(fù)雜度、減小模型規(guī)模,同時提高準(zhǔn)確度。其設(shè)計理念是先進(jìn)行升維操作,然后進(jìn)行降維操作,該過程如下頁圖8 所示。
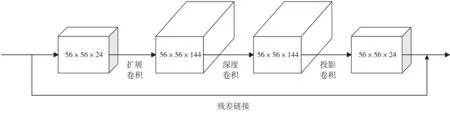
圖8 MobileNetV2 結(jié)構(gòu)
此外,MobileNetV2 針對其倒殘差(inverted residuals)結(jié)構(gòu)中的最后1 個卷積層,采用線性激活函數(shù)代替ReLU 激活函數(shù),能有效防止非線性操作對信息的過度破壞[13]。本研究選擇了改進(jìn)的SSD算法,用于識別極地船舶加速度數(shù)據(jù)的時頻圖,以提高識別的精度。極地船舶的破冰顛震事件在時間序列上不會出現(xiàn)重疊現(xiàn)象,因此需要消除識別過程中出現(xiàn)的重疊檢測,本文在模型中添加非極大值抑制(non maximum suppression, NMS)算法。NMS 算法對所有圖片進(jìn)行循環(huán),選中得分大于門限函數(shù)的框,以減少框的數(shù)量[14]。其對最后一個維度里的內(nèi)容進(jìn)行修改,從而對重疊的顛震識別進(jìn)行消除。
2.4 顛震關(guān)鍵參數(shù)提取
為研究破冰顛震對船舶的影響,以降低局部振動的干擾,需要拆解出顛震數(shù)據(jù)。如圖9 所示,俄羅斯學(xué)者BELOV 等[6]根據(jù)頻段的不同,將破冰船的垂向加速度分為4 個部分:一階船體振動(2 ~ 4 Hz);螺旋槳二階旋轉(zhuǎn)頻率引起的局部振動(3 ~ 6 Hz);螺旋槳葉頻及上層建筑固有頻率范圍內(nèi)的船體局部振動(8 ~ 12 Hz);高階螺旋槳諧振、低速主機(jī)引起的局部振動(16 ~ 35 Hz)。
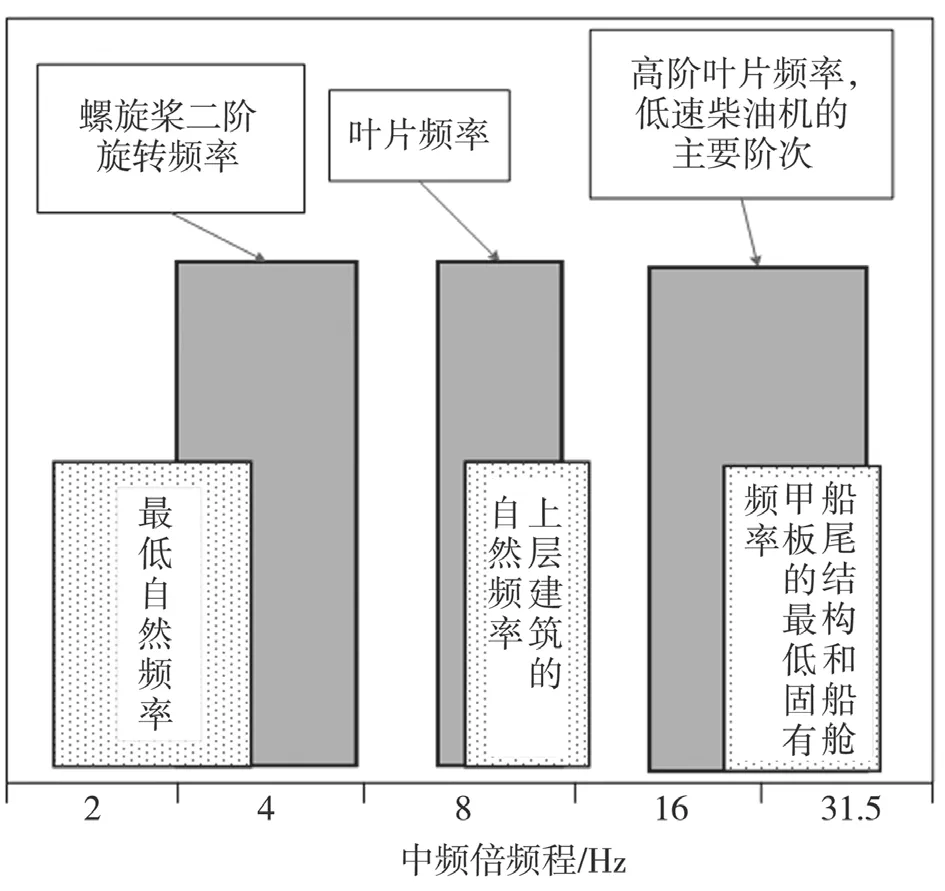
圖9 船舶加速度信號分離
VON BOCK 等[15]在芬蘭阿爾托大學(xué)冰實驗水池通過模型實驗,測量了船舶在破冰工況下的加速度時間歷程,并對所得信號進(jìn)行頻譜分析,結(jié)果顯示:破冰工況下船體運(yùn)動加速度主要分布范圍為0.5 ~ 4 Hz,換算成實船后為0.09 ~ 0.71 Hz。由此可見,破冰激勵下的船舶運(yùn)動頻段在一階振動頻段之下。因此,本研究將船舶運(yùn)動和一階振動響應(yīng)之和定義為破冰顛震,認(rèn)為其主要分布頻段為0 ~ 4 Hz。兩者均為船舶的全局響應(yīng),可作為船舶關(guān)鍵設(shè)備的使用環(huán)境輸入。
圖10 為所測得的“雪龍2”號駕駛室位置加速度信號功率譜。
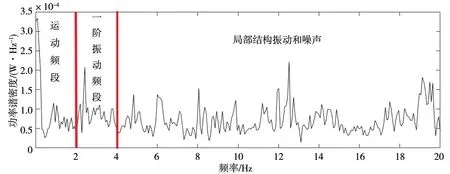
圖10 “雪龍2”號駕駛室位置加速度信號功率譜分析
根據(jù)前期有限元計算以及在靜水中加速度時頻分析,確定本船一階振動頻率約為2.5 Hz。基于以上推理,考慮適度余量,可假設(shè)0 ~ 4 Hz 頻段為顛震頻段,主要成分為剛體運(yùn)動(0 ~ 2 Hz)和一階振動(2 ~ 4 Hz),通過濾波器過濾掉高階振動和局部振動成分,可將船舶破冰顛震成分提取出來。其他頻段則被認(rèn)為是局部結(jié)構(gòu)振動和噪聲,以表2 中案例13 的船舯數(shù)據(jù)為例,不同頻段的數(shù)據(jù)如圖11 所示。通過這種方法,可相對合理地分離顛震成分。因采用了頻帶提取方法,故顛震分析結(jié)果將偏于保守,對于設(shè)備使用環(huán)境的定義也相對更安全。
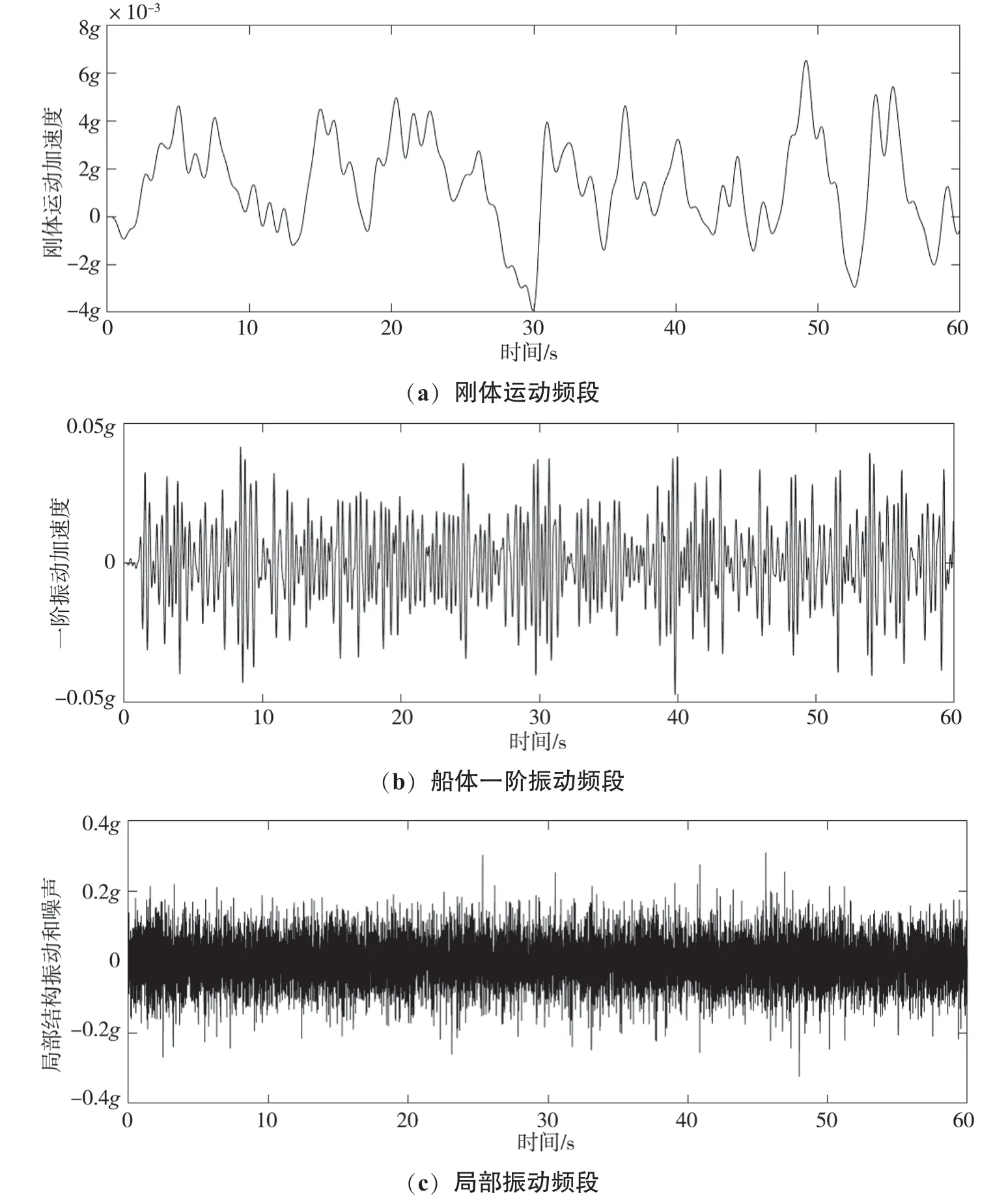
圖11 濾波后的不同加速度頻段信號
3 識別結(jié)果與顛震分析
3.1 顛震識別結(jié)果
對“雪龍2”號的垂向加速度中顛震部分時頻圖中的顛震進(jìn)行識別,提取船舶每分鐘顛震次數(shù)。本次實驗共使用320 張時頻圖,從中隨機(jī)挑選了32 張為測試集、259 張為訓(xùn)練集、29 張為驗證集,利用labelimg 對圖像手動標(biāo)注標(biāo)簽,如下頁圖12 所示。
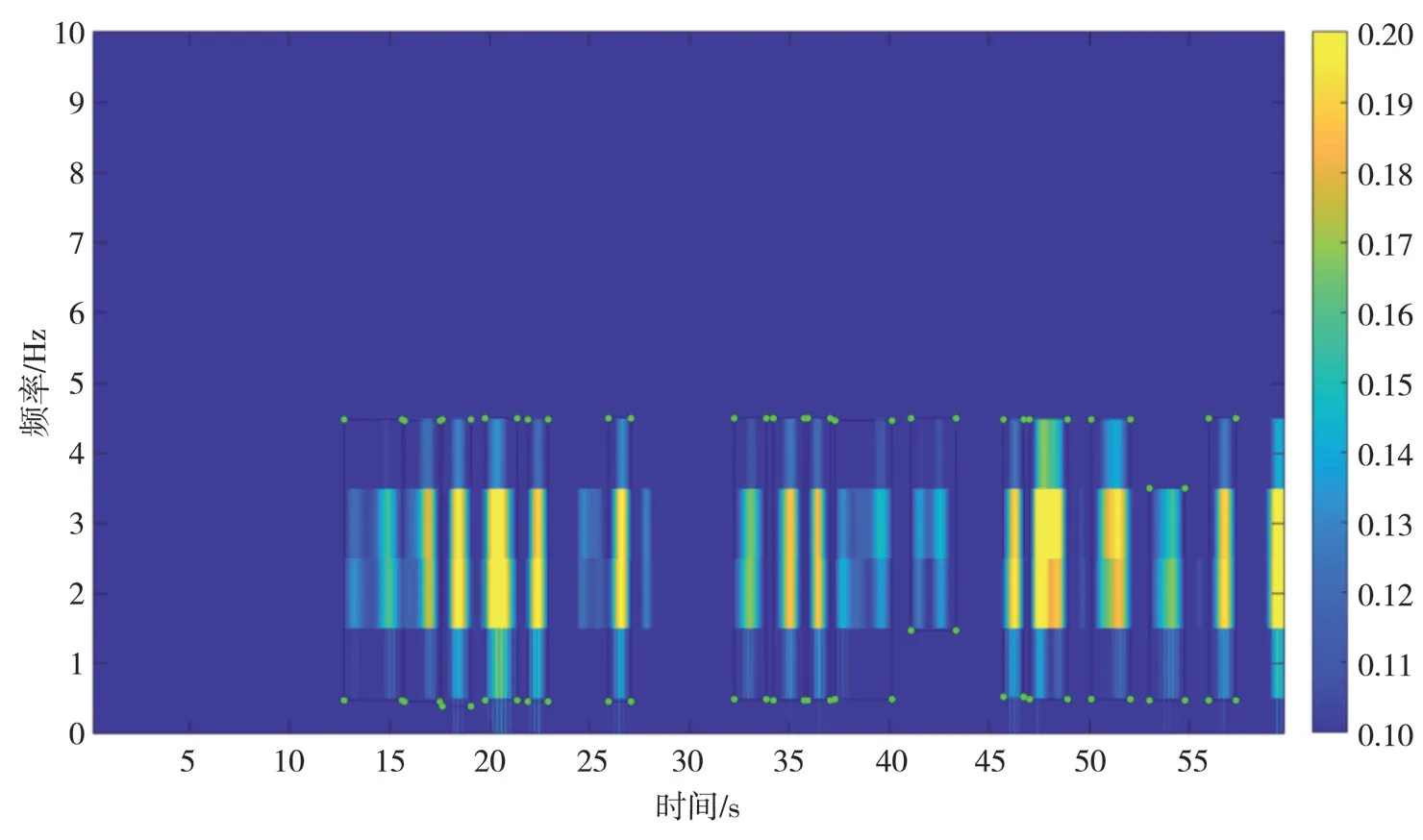
圖12 對時頻圖進(jìn)行顛震標(biāo)定
利用型號為NVIDIA RTX 3080 Ti 的GPU 進(jìn)行訓(xùn)練,訓(xùn)練時平均速度為200 epoch/h。本次實驗中訓(xùn)練迭代500 次,耗時約2.5 h。模型的識別效果如圖13所示,所識別的顛震次數(shù)結(jié)果如表3所示。識別結(jié)果對于識別顛震次數(shù)精度達(dá)到81.99%,滿足實際工程應(yīng)用需求。

圖13 顛震識別效果
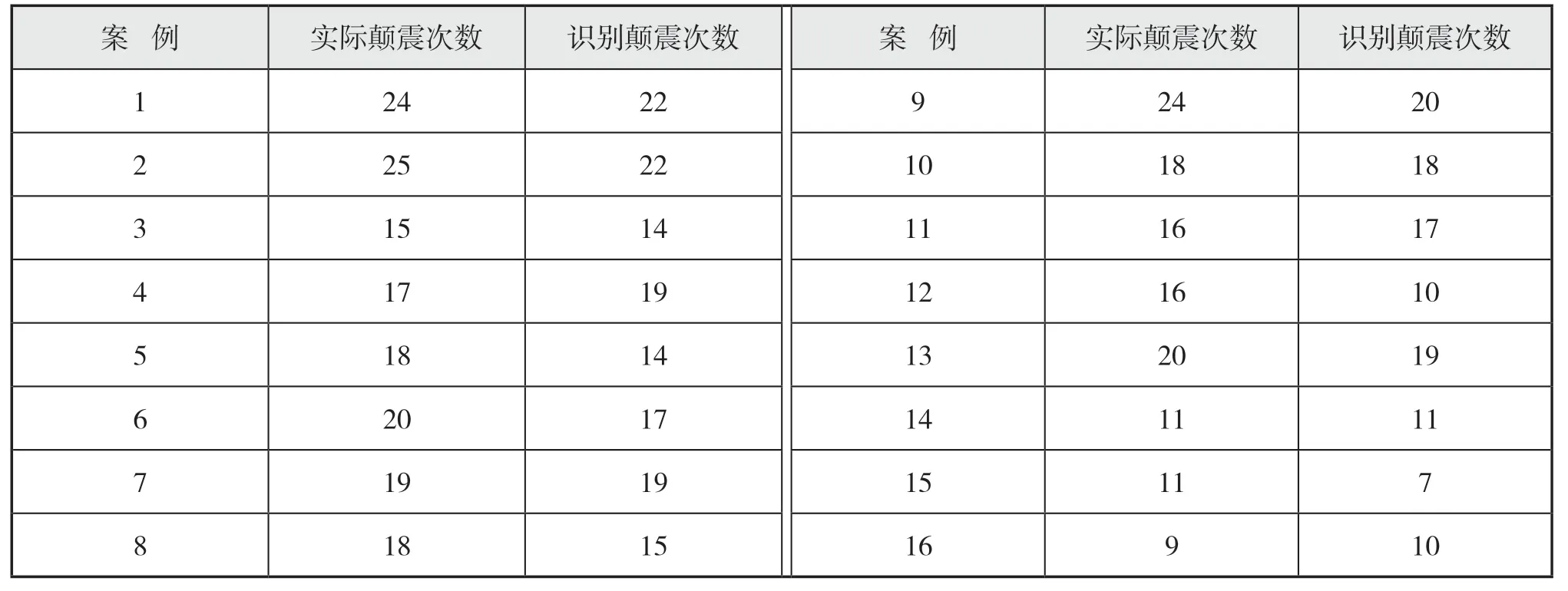
表3 顛震次數(shù)識別結(jié)果 次
3.2 顛震分析
針對不同冰況和船速,本文對16 組數(shù)據(jù)進(jìn)行了詳細(xì)分析,確定了顛震事件,對錨機(jī)間和駕駛室的顛震峰值加速度以及每分鐘發(fā)生次數(shù)進(jìn)行了統(tǒng)計。
文中對不同冰況和航速的設(shè)定見表4,并通過對冰況、航速進(jìn)一步整合,將16 個分析案例歸并為如表5 所示5 種工況。為了便于更加直觀地展示,故以如圖14 所示柱狀圖形式進(jìn)行分析。
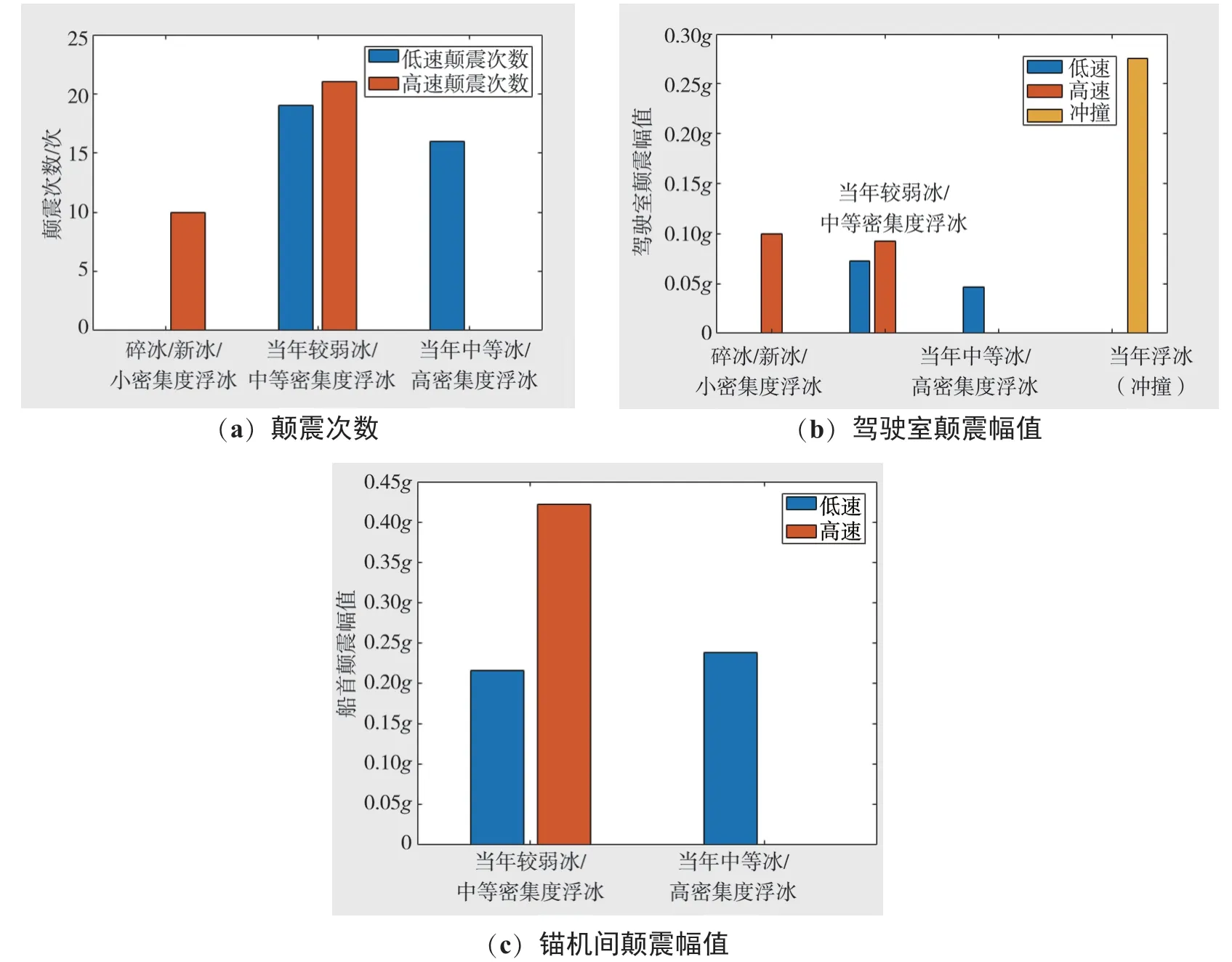
圖14 “雪龍2”號垂向加速度時頻分析柱狀圖

表4 不同冰況和航速的設(shè)定

表5 “雪龍2”號垂向加速度的時頻分析
通過以上對于極地考察船加速度時頻信號的分析,可得到以下結(jié)論:
(1)對比船首和船舯的幅值,可看出船首顛震幅值約為船舯位置的3 ~ 4 倍。
(2)對比不同航速和冰況下顛震次數(shù),可以發(fā)現(xiàn)最嚴(yán)重顛震發(fā)生在中等密集度海冰冰況,且以較高速度行駛的狀態(tài);而在厚冰中,由于速度很低,顛震反而不明顯。
(3)對比不同航速下的顛震次數(shù)和幅值,可見速度對顛震影響明顯,航速越快、顛震次數(shù)越多、幅值越大;而冰厚對顛震的直接影響不明顯,主要是通過影響船速來影響顛震。
4 結(jié) 語
本文提出一種改進(jìn)的SSD 模型,對破冰顛震個數(shù)進(jìn)行自動識別。通過頻譜分析,本文成功分離出“雪龍2”號多次南極航行數(shù)據(jù)中的顛震信號,進(jìn)而提取了顛震事件加速度幅度和發(fā)生頻率,從而形成破冰顛震的識別與分析方法。通過此改進(jìn)的SSD 模型識別時頻圖中的顛震次數(shù),精度可達(dá)到81.99%。
基于該方法,文中進(jìn)一步對各種典型場景下的破冰顛震數(shù)據(jù)進(jìn)行研究,并分析了海冰環(huán)境、船舶航速、測量位置等因素對船舶顛震關(guān)鍵參數(shù)的影響。通過對比分析發(fā)現(xiàn),船首顛震的幅值大約為船舯位置的3 ~ 4 倍。顛震最嚴(yán)重情況通常出現(xiàn)在中等海冰密集度的冰況及以較高速度行駛的狀態(tài)下;而在厚冰環(huán)境下,盡管冰況較差,但由于航速降低,顛震現(xiàn)象反而不明顯。
受限于訓(xùn)練集的規(guī)模以及標(biāo)注準(zhǔn)確率的制約,模型仍有進(jìn)一步提升和優(yōu)化的空間。在未來的研究中,可通過將更多數(shù)據(jù)納入訓(xùn)練集,并對數(shù)據(jù)集進(jìn)行更精確的標(biāo)校,以提升模型識別準(zhǔn)確性;同時,也將逐步細(xì)化船舶速度、冰況和導(dǎo)航數(shù)據(jù)等因素的分析,以深入探究這些環(huán)境變量如何影響破冰顛震,從而使模型在實際應(yīng)用中更具針對性和效率。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
電子制作(2018年11期)2018-08-04 03:25:42
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25