虛假數(shù)據(jù)注入攻擊下多機(jī)器人系統(tǒng)協(xié)同尋源
2024-03-04 02:04:58王彪新伍益明
自動(dòng)化學(xué)報(bào) 2024年2期
王彪新 伍益明 鄭 寧 徐 明
尋源問(wèn)題 (Source seeking) 被定義為定位標(biāo)量場(chǎng)中的極值位置[1].該研究起源于化學(xué)煙羽追蹤[2-3]和氣味源定位[4-5],隨后擴(kuò)展到放射源可以是火源[6]或者電磁信號(hào)源[7]等其他物理信號(hào)源.由于多機(jī)器人系統(tǒng)具有魯棒性強(qiáng)、搜索效率高和可擴(kuò)展等優(yōu)勢(shì)[8],基于多機(jī)器人的尋源方法正逐漸受到關(guān)注.多機(jī)器人系統(tǒng)有多種模型,比如群智能機(jī)器人系統(tǒng)、自重構(gòu)機(jī)器人系統(tǒng)、協(xié)作機(jī)器人系統(tǒng)等.本文采用的是協(xié)作機(jī)器人系統(tǒng),即由多個(gè)具有一定智能的分布式機(jī)器人組成,機(jī)器人之間通過(guò)通信實(shí)現(xiàn)相互間的協(xié)作以完成復(fù)雜的任務(wù).多機(jī)器人系統(tǒng)已經(jīng)有廣泛的應(yīng)用場(chǎng)景,例如無(wú)人機(jī)自主編隊(duì)控制、水下機(jī)器人協(xié)同合作等.多機(jī)器人系統(tǒng)的分布式協(xié)同控制協(xié)議能幫助其在脫離協(xié)調(diào)中心的情況下完成復(fù)雜且危險(xiǎn)的工作,例如監(jiān)視、搜索、定位以及本文所涉及的尋源等.
在現(xiàn)有的文獻(xiàn)中,一般采用梯度法結(jié)合協(xié)同控制協(xié)議來(lái)驅(qū)使多機(jī)器人系統(tǒng)解決尋源問(wèn)題.雖然梯度信息無(wú)法直接通過(guò)物理感應(yīng)設(shè)備測(cè)量,但是可以驅(qū)使機(jī)器人在其周邊鄰域進(jìn)行小范圍的移動(dòng)并且測(cè)量場(chǎng)域中的信號(hào)強(qiáng)度從而推算出梯度.Moore 等[9]考慮如果信號(hào)強(qiáng)度落差較小或者為了避免大量移動(dòng)帶來(lái)的能量消耗,采用圓形編隊(duì)的方法,即將多個(gè)機(jī)器人圍繞一個(gè)中心機(jī)器人不斷旋轉(zhuǎn)來(lái)獲取其周邊鄰域中的信號(hào)強(qiáng)度從而推算出梯度.Fabbiano 等[10]進(jìn)一步考慮極端環(huán)境中可能會(huì)出現(xiàn)全局絕對(duì)坐標(biāo)不可用的情況,提出基于相對(duì)廣角位置的圓形編隊(duì)方法,實(shí)現(xiàn)不依賴全局坐標(biāo)信息解決尋源問(wèn)題.Brinon-Arranz 等[11]針對(duì)水下通信受限的情況,為水下機(jī)器人執(zhí)行尋源任務(wù)設(shè)計(jì)了能容忍延遲的異步通信協(xié)議.此外,Zou 等[7]通過(guò)改進(jìn)粒子群優(yōu)化 (Particle swarm sptimlzation,PSO) 算法來(lái)解決尋源問(wèn)題,該算法不依賴梯度信息并且擁有在多源環(huán)境中尋源的潛力.
但是上述工作都忽略了實(shí)際應(yīng)用場(chǎng)景下多機(jī)器人系統(tǒng)往往暴露在開(kāi)放的網(wǎng)絡(luò)環(huán)境中,攻擊者在網(wǎng)絡(luò)中生成的虛假數(shù)據(jù)注入攻擊容易導(dǎo)致多機(jī)器人系統(tǒng)尋源任務(wù)的失敗,因此網(wǎng)絡(luò)安全是尋源問(wèn)題中必須考慮的關(guān)鍵因素.攻擊者會(huì)通過(guò)偽裝系統(tǒng)中的機(jī)器人來(lái)注入虛假的信息,從而欺騙系統(tǒng)中其他的機(jī)器人來(lái)達(dá)到破壞系統(tǒng)正常運(yùn)行的目的.近年來(lái),Xu等[12]針對(duì)多機(jī)器人系統(tǒng)提出了多種不同且新穎的網(wǎng)絡(luò)攻擊,鼓勵(lì)除了自動(dòng)化和智能化外應(yīng)構(gòu)建更好的防御以提高可靠性;Zhou 等[13]針對(duì)拒絕服務(wù)(Denial of service,DoS) 攻擊對(duì)分布式多機(jī)器人系統(tǒng)的影響,基于分而治之的思想劃分系統(tǒng)以提升系統(tǒng)魯棒性;Deng 等[14]針對(duì)復(fù)雜多機(jī)器人系統(tǒng)中拜占庭 (Byzantine) 節(jié)點(diǎn)的威脅,設(shè)計(jì)了一種識(shí)別方法以檢測(cè)系統(tǒng)中潛在的攻擊風(fēng)險(xiǎn).雖然目前針對(duì)網(wǎng)絡(luò)攻擊對(duì)多機(jī)器人系統(tǒng)影響的研究成果斐然,但是僅有文獻(xiàn)[15]考慮了網(wǎng)絡(luò)攻擊對(duì)多機(jī)器人系統(tǒng)執(zhí)行尋源任務(wù)的影響,并且提出了基于MSR 的彈性協(xié)同尋源算法以抵御通信鏈路中的欺騙攻擊.
另一方面,在研究尋源問(wèn)題的領(lǐng)域中,現(xiàn)有的工作成果一般分解位置坐標(biāo)這一向量信息到各個(gè)分量維度上,再在各個(gè)維度上分別利用標(biāo)量協(xié)議來(lái)實(shí)現(xiàn)尋源.然而向量分解法忽略了在向量情況下復(fù)用標(biāo)量彈性協(xié)議所帶來(lái)的安全區(qū)間界定隱患[16-17].Abbas 等[18]指出當(dāng)狀態(tài)值是向量形式時(shí),彈性趨同的目標(biāo)是保證正常節(jié)點(diǎn)收斂在正常節(jié)點(diǎn)的初始狀態(tài)值構(gòu)成的凸包內(nèi),因此彈性向量趨同 (Resilient vector consensus) 更適合于多維向量狀態(tài)值情況下的彈性趨同.如圖1 所示,使用分解向量的方法并且簡(jiǎn)單復(fù)用標(biāo)量彈性協(xié)議會(huì)使得安全區(qū)間遠(yuǎn)大于實(shí)際允許的安全區(qū)間[17],彈性協(xié)議無(wú)法處理狀態(tài)值位于安全區(qū)間內(nèi)的惡意攻擊,因此更嚴(yán)格精準(zhǔn)的安全區(qū)間能抵御更大范圍的惡意攻擊.此外Abbas 等[19]具體分析了將高維狀態(tài)值投影到較低維度來(lái)實(shí)現(xiàn)彈性收斂所帶來(lái)的對(duì)準(zhǔn)確性和彈性的影響.目前彈性向量趨同算法一般采用基于Tverberg 分區(qū)[20]、Centerpoint 點(diǎn)集[18,21]或者構(gòu)建安全區(qū)域[17,22]的思想來(lái)計(jì)算一個(gè)位于鄰居狀態(tài)值凸集內(nèi)的點(diǎn),從而實(shí)現(xiàn)近似分布式魯棒收斂 (Approximate distributed robust convergence,ADRC)[23-24].

圖1 彈性標(biāo)量協(xié)議所界定的安全區(qū)間 (淺色方形區(qū)域) 和彈性向量協(xié)議所界定的安全區(qū)間 (深色區(qū)域)[17]Fig.1 The security intervals defined by the resilient scalar protocol (Light square area) and the resilient vector protocol (Dark area)[17]
受上述工作的啟發(fā),本文主要致力于研究基于向量趨同的彈性協(xié)同尋源方法,為多維未知環(huán)境中執(zhí)行合作尋源任務(wù)的多機(jī)器人系統(tǒng)提供容忍一定上限虛假數(shù)據(jù)注入攻擊的彈性.本文針對(duì)尋源任務(wù)的特殊性,提出一種基于梯度下降法和向量趨同的彈性尋源方法,分析了該方法的充要條件和性能.數(shù)理分析和數(shù)字模擬仿真表明當(dāng)環(huán)境中只存在唯一源的情況下,盡管系統(tǒng)中存在注入虛假數(shù)據(jù)的惡意節(jié)點(diǎn),該方法仍能保證多機(jī)器人系統(tǒng)中所有其他正常節(jié)點(diǎn)最終都能尋源成功,即收斂到源位置.本文的主要?jiǎng)?chuàng)新點(diǎn)如下:
1) 針對(duì)虛假數(shù)據(jù)注入攻擊在執(zhí)行尋源任務(wù)的多機(jī)器人系統(tǒng)中對(duì)機(jī)器人節(jié)點(diǎn)的惡意影響,建立相關(guān)的數(shù)學(xué)模型.本文所考慮的攻擊模型為系統(tǒng)外攻擊者入侵并操縱系統(tǒng)內(nèi)的機(jī)器人節(jié)點(diǎn),被入侵的節(jié)點(diǎn)不僅會(huì)向系統(tǒng)注入虛假的惡意數(shù)據(jù)來(lái)誤導(dǎo)其他正常節(jié)點(diǎn),而且自身也脫離了系統(tǒng)協(xié)議的控制.相比于欺騙攻擊模型僅考慮鏈路中存在欺騙攻擊,本文攻擊模型的攻擊能力更強(qiáng),因此也需要更為周密的防御措施.
2) 針對(duì)網(wǎng)絡(luò)攻擊下多維情況復(fù)用彈性標(biāo)量趨同算法可能存在安全區(qū)間界定隱患,基于彈性向量趨同算法提出彈性向量協(xié)同尋源方法.基于本文提出的方法所設(shè)定的安全區(qū)間更精確,更符合實(shí)際并且能抵御更大范圍的攻擊,所以更具魯棒性.傳統(tǒng)多機(jī)器人尋源方法通常采用向量分解方法并且在各個(gè)維度上復(fù)用標(biāo)量協(xié)議,因此在抵御網(wǎng)絡(luò)攻擊時(shí)可能會(huì)存在安全區(qū)間界定隱患.本文針對(duì)尋源問(wèn)題中位置信息往往是多維向量的特點(diǎn),借鑒多維彈性趨同算法來(lái)設(shè)計(jì)多維彈性協(xié)同尋源方法以解決尋源問(wèn)題,因此繼承了多維彈性趨同算法中安全區(qū)間比標(biāo)量彈性趨同算法中安全區(qū)間更為緊湊的優(yōu)點(diǎn).
3) 針對(duì)傳統(tǒng)的彈性向量趨同算法只能保證最終的收斂位置位于初始安全區(qū)間內(nèi),而具體收斂位置往往未知且難以控制的問(wèn)題,本文引入梯度信息作為主要參考依據(jù),在節(jié)點(diǎn)真實(shí)坐標(biāo)位置的基礎(chǔ)上添加梯度信息,從而改進(jìn)彈性向量趨同算法以保證最終的收斂位置為源點(diǎn).同時(shí),本文基于彈性向量趨同算法相關(guān)文獻(xiàn)的定理結(jié)論和多機(jī)器人系統(tǒng)通信拓?fù)溥B通性,通過(guò)數(shù)理分析得到改進(jìn)后的彈性向量協(xié)同尋源方法的充分必要條件.
4) 針對(duì)網(wǎng)絡(luò)攻擊下多機(jī)器人尋源過(guò)程收斂速率的界定問(wèn)題,本文基于梯度下降法中對(duì)收斂速率的定義分析本文所提方法的收斂速率.通過(guò)數(shù)理分析得到收斂速率的取值范圍,并通過(guò)數(shù)值仿真實(shí)驗(yàn)與現(xiàn)有工作進(jìn)行對(duì)比,仿真結(jié)果表明基于彈性向量協(xié)同尋源方法的多機(jī)器人系統(tǒng)在收斂速率方面具有優(yōu)越性.
5) 針對(duì)系統(tǒng)中可能存在擾動(dòng)的問(wèn)題,本文討論在一定范圍內(nèi)的擾動(dòng)對(duì)使用彈性向量協(xié)同尋源方法的多機(jī)器人系統(tǒng)的影響.通過(guò)數(shù)理分析得到當(dāng)擾動(dòng)強(qiáng)度小于當(dāng)前時(shí)刻機(jī)器人的單位時(shí)間位移上限時(shí),多機(jī)器人系統(tǒng)使用彈性向量協(xié)同尋源方法依然能收斂在源點(diǎn).
1 問(wèn)題描述
1.1 預(yù)備知識(shí)
1.1.1 圖論知識(shí)
考慮由N個(gè)機(jī)器人組成的多機(jī)器人系統(tǒng),如果將機(jī)器人抽象化為節(jié)點(diǎn)而它們之間的通信關(guān)系抽象化為邊,那么該多機(jī)器人系統(tǒng)的通信網(wǎng)絡(luò)可用一個(gè)有向加權(quán)圖G=(V,E,A) 表示.其中V={v1,v2,···,vN} 表示節(jié)點(diǎn)集合,E?V×V表示邊集.兩個(gè)節(jié)點(diǎn)之間的連接關(guān)系用帶有權(quán)重信息的鄰接矩陣A=表示.如果 (vi,vj)∈E,則表明節(jié)點(diǎn)vi可以接收到vj發(fā)送的信息,此時(shí)aij>0;否則節(jié)點(diǎn)vi不可以接收到vj發(fā)送的信息,此時(shí)aij=0.節(jié)點(diǎn)vi的鄰居集合表示為Ni={vj ∈V|(vi,vj)∈E}.
此外,為了衡量系統(tǒng)拓?fù)涞倪B通性,本文引入r-可達(dá)集合 (r-reachable set) 和r-魯 棒圖(r-robust graph)的概念.
定義 1[25].(r-可達(dá)集合) 對(duì)于圖G=(V,E) 及其中一非空子集S?V,如果S中至少有一個(gè)節(jié)點(diǎn)vi在集合Ni-S中與不少于r個(gè)節(jié)點(diǎn)相連,則稱S為r-可達(dá)集合.
定義2[25].(r-魯棒圖) 對(duì)于圖G=(V,E),如果對(duì)V中任意一對(duì)非空子集S1,S2?V,S1∩S2=?,保證至少有一個(gè)子集為r-可達(dá)集合,則稱G為r-魯棒圖.
1.1.2 凸包理論
凸包理論在向量趨同算法中發(fā)揮著重要作用,以下引用離散幾何中關(guān)于凸包相交的結(jié)論,以便于后續(xù)理論分析工作.在歐氏空間中,連接凸集H中的任意一對(duì)點(diǎn) (ha,hb) 的線段上的點(diǎn)也在該集合內(nèi),即
集合H的凸包是指一個(gè)最小凸多邊形,滿足H中的點(diǎn)在多邊形內(nèi)或者在多邊形上,記作conv(H).根據(jù)凸包理論,集合H和凸包c(diǎn)onv(H) 具有以下性質(zhì)
1.1.3 攻擊模型
考慮多機(jī)器人系統(tǒng)在作業(yè)過(guò)程中往往暴露在開(kāi)放的網(wǎng)絡(luò)環(huán)境中,因此需要對(duì)網(wǎng)絡(luò)攻擊進(jìn)行建模.不同于系統(tǒng)內(nèi)其他的正常機(jī)器人,有一部分機(jī)器人或因系統(tǒng)外部網(wǎng)絡(luò)攻擊者的操縱而脫離系統(tǒng)協(xié)議的控制并且通過(guò)鄰居交互向系統(tǒng)注入虛假的惡意信息;或因機(jī)器人本身的故障導(dǎo)致自身狀態(tài)值停滯或者廣播錯(cuò)誤信息.為了區(qū)別于通信拓?fù)鋬?nèi)其他的正常節(jié)點(diǎn) (Regular node),依據(jù)其行為對(duì)系統(tǒng)的惡意影響,本文把這類節(jié)點(diǎn)稱為“惡意節(jié)點(diǎn)” (Malicious node).為了方便討論,將正常節(jié)點(diǎn)集合標(biāo)記為R,將惡意節(jié)點(diǎn)集合標(biāo)記為M.圖2 中藍(lán)色點(diǎn)代表正常節(jié)點(diǎn),而紅色點(diǎn)代表惡意節(jié)點(diǎn).考慮攻擊者資源的有限,本文假設(shè)攻擊發(fā)生范圍滿足f-本地有界 (flocally bounded)[26],即系統(tǒng)拓?fù)渲腥我庹9?jié)點(diǎn)的鄰居節(jié)點(diǎn)中惡意節(jié)點(diǎn)個(gè)數(shù)最多不超過(guò)f.f-locally bounded 攻擊模型在多機(jī)器人系統(tǒng)和多智能體系統(tǒng)的彈性研究[15,27]中被廣泛采用.

圖2 環(huán)境中的機(jī)器人節(jié)點(diǎn)之間的通信關(guān)系和安全區(qū)域Fig.2 The communication relationship and safe area among the robot nodes in the environment
1.2 問(wèn)題建模
本文的研究對(duì)象為在執(zhí)行合作尋源任務(wù)過(guò)程中同時(shí)遭受網(wǎng)絡(luò)攻擊的由N個(gè)機(jī)器人組成的一階離散時(shí)間多機(jī)器人系統(tǒng),其動(dòng)力學(xué)模型為
其中,pi(t)∈Rd為節(jié)點(diǎn)i在步時(shí)t的狀態(tài)值,也是其在尋源過(guò)程中的實(shí)際位置坐標(biāo)信息;ui(t)∈Rd為控制輸入,通常由節(jié)點(diǎn)與本地鄰居交互得出并影響下一步時(shí)的節(jié)點(diǎn)狀態(tài)值.
考慮這樣一個(gè)環(huán)境場(chǎng),其中充斥著由源點(diǎn)散發(fā)的物理信號(hào),例如溫度、壓強(qiáng)、化學(xué)制品濃度、電磁信號(hào)強(qiáng)度等,本文假設(shè)這些信號(hào)遵循離源點(diǎn)越遠(yuǎn)強(qiáng)度越低,源點(diǎn)坐標(biāo)擁有全局物理信號(hào)強(qiáng)度最大值.將環(huán)境場(chǎng)用標(biāo)量場(chǎng)映射函數(shù)f(p):Rd →R 建模,環(huán)境場(chǎng)中的每個(gè)位置都映射相應(yīng)的物理信號(hào)強(qiáng)度.這些信號(hào)強(qiáng)度的分布情況對(duì)于多機(jī)器人系統(tǒng)來(lái)說(shuō)是未知的,機(jī)器人需要通過(guò)感應(yīng)器測(cè)量標(biāo)量場(chǎng)的信號(hào)強(qiáng)度來(lái)追尋源頭位置 o.
如圖2(a)所示,彩色等高線表示環(huán)境場(chǎng)中物理信號(hào)的強(qiáng)度分布情況,中心五角星代表目標(biāo)源點(diǎn)位置 o.多機(jī)器人系統(tǒng)通過(guò)有向通信交互信息,使用本文所設(shè)計(jì)的彈性向量協(xié)同尋源方法計(jì)算得出安全區(qū)域 (如圖2(b)中藍(lán)色區(qū)域所示) 以驅(qū)使機(jī)器人安全尋源.值得注意的是,由于機(jī)器人節(jié)點(diǎn)根據(jù)梯度廣播的坐標(biāo)信息(t) 是由機(jī)器人節(jié)點(diǎn)根據(jù)其實(shí)際的坐標(biāo)信息pi(t) 以及梯度信息計(jì)算而來(lái),因此在圖2(b)中,灰色多邊形頂點(diǎn)所代表的(t) 與機(jī)器人節(jié)點(diǎn)坐標(biāo)pi(t) 之間存在一定距離.考慮到戶外環(huán)境情況變化,機(jī)器人不能時(shí)刻都保持勻速前進(jìn).因此引入位移能力xi(t) 概念,表示在t次迭代時(shí)節(jié)點(diǎn)i所代表的機(jī)器人所能位移的最大距離.本文假設(shè)除非節(jié)點(diǎn)已經(jīng)成功抵達(dá)源點(diǎn) o,否則位移能力不為零.通過(guò)后續(xù)控制器設(shè)計(jì)可以看到,安全區(qū)間的計(jì)算并非基于節(jié)點(diǎn)真實(shí)坐標(biāo)信息計(jì)算得出,而是基于節(jié)點(diǎn)真實(shí)坐標(biāo)以及位移能力xi(t) 得到.
本文的目標(biāo)是: 盡管存在惡意節(jié)點(diǎn)的攻擊,依然可以通過(guò)本文所設(shè)計(jì)的彈性向量協(xié)同尋源方法保證所有的正常機(jī)器人最終都能收斂到源點(diǎn)位置,即
2 控制器設(shè)計(jì)
2.1 彈性向量協(xié)同尋源方法
為解決多機(jī)器人系統(tǒng)尋源任務(wù)中會(huì)受到惡意節(jié)點(diǎn)影響的問(wèn)題,基于廣泛運(yùn)用于尋源方法的梯度下降法以及更適合處理多維情況的彈性向量趨同算法,本文提出彈性向量協(xié)同尋源方法,具體步驟如下:
1) 在t步時(shí),節(jié)點(diǎn)i通過(guò)其所在位置pi(t) 的梯度信息Gpi(t)和自身該步時(shí)的位移能力xi(t),計(jì)算
并廣播給節(jié)點(diǎn)i的所有鄰居節(jié)點(diǎn)Ni.同時(shí),將鄰居節(jié)點(diǎn)發(fā)送的信息(t),?j ∈Ni與(t) 合并為集合(t).

圖3 6 個(gè)信息量的子集凸包和安全區(qū)域Fig.3 The subset convex hull and safe area of six information values
3) 記安全區(qū)域Si,m(t) 的頂點(diǎn)集合為Q,利用頂點(diǎn)信息計(jì)算t步時(shí)節(jié)點(diǎn)i的目的地坐標(biāo)(t)
4) 節(jié)點(diǎn)依據(jù)自身在該步時(shí)的位移能力xi(t) 朝著步驟3)計(jì)算得出的目的地坐標(biāo)(t) 位移,如果位移能力超出目的地坐標(biāo)與自身坐標(biāo)的距離,則該步時(shí)位移到目的地坐標(biāo)處就停下.所以式 (3) 中的ui(t)被設(shè)計(jì)為
步驟1)中,雖然梯度信息不可以直接獲取,但是在尋源任務(wù)中通過(guò)領(lǐng)域移動(dòng)、圓形編隊(duì)等方法來(lái)獲取梯度信息已經(jīng)取得顯著研究成果.由于本文的研究重心并非如何在尋源任務(wù)中獲取梯度信息,而是關(guān)注尋源任務(wù)過(guò)程中抵御網(wǎng)絡(luò)攻擊帶來(lái)的惡意影響,所以關(guān)于梯度信息的獲取方法讀者可參考文獻(xiàn)[9-10] 等.步驟1) 計(jì)算的(t) 是后續(xù)步驟中的主要參數(shù),其物理含義是機(jī)器人節(jié)點(diǎn)i的真實(shí)坐標(biāo)位置向源點(diǎn)偏移一小段距離的坐標(biāo)位置,具體距離大小由該機(jī)器人節(jié)點(diǎn)i的位移能力決定.
值得注意的是,步驟2)中參與安全區(qū)域計(jì)算的變量并非節(jié)點(diǎn)的實(shí)際坐標(biāo)位置而是節(jié)點(diǎn)通過(guò)梯度信息和自身位移能力計(jì)算的坐標(biāo)信息 (詳見(jiàn)步驟1)),因此為了區(qū)別討論后文將統(tǒng)一稱為信息量.進(jìn)一步劃分,將正常節(jié)點(diǎn)計(jì)算的信息量稱為正常信息量,將惡意節(jié)點(diǎn)任意散布的信息量稱為惡意信息量.可以在圖2(b)中看見(jiàn)信息量位置與節(jié)點(diǎn)實(shí)際位置之間的區(qū)別,灰色多邊形的頂點(diǎn)所代表的就是信息量的物理含義.信息量的位置與節(jié)點(diǎn)真實(shí)的位置之間有一小段距離,而這一小段距離就是節(jié)點(diǎn)的位移能力xi(t) 的數(shù)值大小.通過(guò)位移能力xi(t) 計(jì)算信息量(t) 是彈性向量協(xié)同尋源方法能夠?qū)崿F(xiàn)最終收斂位置位于源點(diǎn)的關(guān)鍵.
安全區(qū)域的計(jì)算是保證正常節(jié)點(diǎn)不受惡意節(jié)點(diǎn)干擾的重要步驟.如圖3 所示,由6 個(gè)節(jié)點(diǎn)廣播的信息量構(gòu)成的集合可以得到6 個(gè)子集,每個(gè)子集都去除了一個(gè)信息量.由這6 個(gè)子集構(gòu)成的凸包相交,相交區(qū)域則為步驟2)所得出的安全區(qū)域,如圖3(h)所示.
2.2 充分必要條件分析
受文獻(xiàn)[17]的啟發(fā),接下來(lái)對(duì)參與運(yùn)算的信息量數(shù)量與惡意節(jié)點(diǎn)的信息量數(shù)量上限之間的關(guān)系進(jìn)行分析,從而得出彈性向量協(xié)同尋源方法運(yùn)行所需的充分必要條件.
引理 1[17].如果 |(t)|>m(d+1),則Si,m(t)≠?;如果 |(t)|≤m(d+1),則P(Si,m(t)≠?)≠1.
引理 2.當(dāng)且僅當(dāng)多機(jī)器人系統(tǒng)的通信拓?fù)鋱D連通性達(dá)到m(d+1)-魯棒圖時(shí),任意節(jié)點(diǎn)i所計(jì)算的安全區(qū)域不為空,即Si,m(t)≠?.
證明.當(dāng)多機(jī)器人系統(tǒng)的通信拓?fù)錆M足m(d+1)-魯棒圖時(shí),根據(jù)定義1 和定義2,通信拓?fù)渲腥我夤?jié)點(diǎn)的鄰居節(jié)點(diǎn)數(shù)量滿足|Ni|≥m(d+1),i ∈R.因此任意正常節(jié)點(diǎn)i在計(jì)算安全區(qū)域時(shí),參與計(jì)算的信息量滿足 |(t)|>m(d+1),由引理1 可得此時(shí)安全區(qū)域不為空.然而當(dāng)多機(jī)器人系統(tǒng)的通信拓?fù)溥B通性沒(méi)有達(dá)到m(d+1)-魯棒圖條件時(shí),通信拓?fù)渲兄辽俅嬖谝粋€(gè)節(jié)點(diǎn)i,其鄰居節(jié)點(diǎn)的數(shù)量不滿足 |Ni|≥m(d+1),i ∈R.此時(shí)節(jié)點(diǎn)i計(jì)算安全區(qū)域所利用的信息量|(t)|≤m(d+1),根據(jù)引理1 可得安全區(qū)域不一定存在,即P(Si,m(t)≠?)≠1.綜上所述,當(dāng)且僅當(dāng)多機(jī)器人系統(tǒng)的通信拓?fù)溥B通性達(dá)到m(d+1)-魯棒圖條件時(shí),任意正常節(jié)點(diǎn)i所計(jì)算的安全區(qū)域存在.
上述引理通過(guò)分析本地惡意節(jié)點(diǎn)數(shù)量與鄰居數(shù)量之間的關(guān)系,給出了安全區(qū)域存在的充分必要條件.下文將分析該方法的安全性能和收斂性能,在每一步時(shí)中節(jié)點(diǎn)的安全性被保證的前提下,所有的正常節(jié)點(diǎn)i∈R都將收斂到環(huán)境中的唯一源點(diǎn) o.需要注意的是,以下數(shù)學(xué)推論的前提條件是,每一步時(shí)中任意正常節(jié)點(diǎn)所計(jì)算的安全區(qū)域不為空,即機(jī)器人的通信拓?fù)湫枰獫M足m(d+1)-魯棒圖.
2.3 收斂性分析
引理3 將分析每一步時(shí)計(jì)算的目的地坐標(biāo)與正常節(jié)點(diǎn)計(jì)算的信息量之間的關(guān)系.從彈性向量協(xié)同尋源方法的步驟3)中可以看到,(t)是指節(jié)點(diǎn)i通過(guò)自身與鄰居傳輸?shù)男畔⒘康贸龅哪康牡刈鴺?biāo),節(jié)點(diǎn)i會(huì)根據(jù)自身該步時(shí)的位移能力xi(t) 朝著該目的地坐標(biāo)前進(jìn)一段距離.
引理 3.在彈性向量協(xié)同方法每一步時(shí)t中,對(duì)于任意正常節(jié)點(diǎn)i,目的地坐標(biāo)(t) 位于conv({(t)|k ∈Ni ∩R ∪i})內(nèi).
證明.已知安全區(qū)域Si,m(t) 包含于去除了f個(gè)信息量后剩下的子集凸包,易得在彈性向量協(xié)同方法每一步時(shí)t中,對(duì)于任意正常節(jié)點(diǎn)i,安全區(qū)域Si,m(t)包含于此步時(shí)正常節(jié)點(diǎn)計(jì)算的信息量所構(gòu)成的凸包內(nèi),即
由凸包定理可得,凸包相交的交集也是凸包,所以安全區(qū)域Si,m(t) 必為凸包.目的地坐標(biāo)(t)是由安全區(qū)域的頂點(diǎn)坐標(biāo)集合Q線性表出的,且表出系數(shù)滿足,結(jié)合式 (2),可知目的地坐標(biāo)(t) 位于安全區(qū)域Si,m(t) 內(nèi),且Si,m(t)?conv({p′k(t)|k ∈Ni ∩R ∪i}),所以目的地坐標(biāo)(t)位于conv({(t)|k ∈Ni ∩R ∪i}) 內(nèi).
引理4.在任意步時(shí)t,對(duì)于任意節(jié)點(diǎn)i,(t) 必處于由集合 {pk(t)|k ∈R}∪o構(gòu)成的凸包內(nèi),即
證明.證明之前,需要分析正常節(jié)點(diǎn)所計(jì)算的信息量并上源點(diǎn)的凸包與實(shí)際坐標(biāo)并上源點(diǎn)的凸包之間的關(guān)系.在任意步時(shí)t,正常節(jié)點(diǎn)所計(jì)算的信息量集合 {(t)|k ∈R}并上源點(diǎn) o 的集合凸包包含于正常節(jié)點(diǎn)實(shí)際狀態(tài)值集合 {pk(t)|k ∈R}并上源點(diǎn)o的集合凸包,即
同時(shí),conv({(t)}∪o) 中的任意一點(diǎn)也可以由集合 {pk(t)}∪o 線性表出,證明如下
上述引理描述了每一步時(shí)t中任意正常節(jié)點(diǎn)計(jì)算的目的地坐標(biāo)(t) 與方法執(zhí)行過(guò)程中所有正常節(jié)點(diǎn)的實(shí)際狀態(tài)值和源點(diǎn)之間的包含關(guān)系,由此可以得出(t) 可以由集合 {pk(t)|k ∈R}∪o線性表出,這在后續(xù)引理5 的證明中發(fā)揮著關(guān)鍵作用
回顧彈性向量協(xié)同尋源方法步驟4)以及輸入控制ui(t) 的設(shè)計(jì),不難發(fā)現(xiàn)任意正常節(jié)點(diǎn)下一步時(shí)的節(jié)點(diǎn)真實(shí)坐標(biāo)位于上一步時(shí)的真實(shí)坐標(biāo)與上一步時(shí)所計(jì)算的目的地坐標(biāo)之間
引理 5.正常節(jié)點(diǎn)在進(jìn)行一次更新之后,它們的位置集合 {pk(t+1)|k ∈R}并上源點(diǎn) o 的凸包包含于更新之前的節(jié)點(diǎn)坐標(biāo)集合 {pk(t)|k ∈R}并上源點(diǎn) o 的凸包
證明.由式(2)可得,任意在凸包c(diǎn)onv({pk(t+1)|k ∈R}∪o) 內(nèi)取一點(diǎn)可由集合{pk(t+1)|k ∈R}∪o 線性表出
同時(shí),凸包c(diǎn)onv({pk(t+1)}∪o) 內(nèi)任意一點(diǎn)也可以由集合 {pk(t)}∪o 線性表出,證明如下
由于
所以這表明由集合 {pk(t+1)|k ∈R}并上源點(diǎn) o 線性表出的點(diǎn)同時(shí)也可以由集合 {pk(t)|k ∈R}并上源點(diǎn) o 線性表出,即在凸包c(diǎn)onv({pk(t+1)|k ∈R}∪o) 中的任意點(diǎn)同時(shí)也在凸包c(diǎn)onv({pk(t)|k ∈R}∪o)中.
引理5 分析了每一步時(shí)更新前后節(jié)點(diǎn)的真實(shí)坐標(biāo)集合之間的包含關(guān)系.除非所有的正常節(jié)點(diǎn)都失去了位移能力,否則正常節(jié)點(diǎn)會(huì)朝著目的地坐標(biāo)移動(dòng)一段距離,這意味著節(jié)點(diǎn)的真實(shí)坐標(biāo)發(fā)生了更新,即 {pk(t)≠pk(t+1)|k ∈R},所以式 (18) 可以進(jìn)一步精確為
至此已經(jīng)可以看出隨著時(shí)間的推移,正常節(jié)點(diǎn)真實(shí)坐標(biāo)并上源點(diǎn)坐標(biāo)的凸包會(huì)不斷縮小,直至最終完全收斂于源點(diǎn).為了進(jìn)一步直觀地證明所有正常節(jié)點(diǎn)最終會(huì)收斂于源點(diǎn),接下來(lái)介紹一個(gè)輔助概念pmax(t),即在t步時(shí)距離源點(diǎn)最遠(yuǎn)的節(jié)點(diǎn)坐標(biāo).由引理5 可得,,其中
在之后的數(shù)學(xué)分析中將得到pmax(t) 到源點(diǎn) o 的距離會(huì)隨著步時(shí)t的增加而縮小至零,并且由此來(lái)證明最終所有的正常節(jié)點(diǎn)都會(huì)收斂于源點(diǎn) o.以不同的點(diǎn)作為坐標(biāo)系原點(diǎn),任意兩點(diǎn)之間的距離并不會(huì)因此發(fā)生改變.因此在分析距離時(shí),以源點(diǎn)坐標(biāo)作為坐標(biāo)系原點(diǎn)可以簡(jiǎn)化證明過(guò)程.當(dāng)以源點(diǎn) o 作為坐標(biāo)系原點(diǎn)時(shí),節(jié)點(diǎn)坐標(biāo)在數(shù)值上等同于由源點(diǎn)指向節(jié)點(diǎn)坐標(biāo)的向量且pmax(t+1)-o=pmax(t+1)=
接下來(lái)將證明本文所提出的彈性協(xié)同尋源方法的收斂性,即最終所有正常節(jié)點(diǎn)都將收斂于源點(diǎn) o.
定理 1.當(dāng)且僅當(dāng)多機(jī)器人系統(tǒng)的通信拓?fù)錆M足m(d+1)-魯棒圖時(shí),正常機(jī)器人在彈性協(xié)同尋源方法的控制下最終能收斂于源點(diǎn) o,即
接下來(lái)證明,即使任意兩個(gè)向量pa(t) 與pb(t) 之間的夾角為零以及所有的正常節(jié)點(diǎn)到源點(diǎn) o 的距離相等同時(shí)滿足,Dmax(t+1) 依然嚴(yán)格小于Dmax(t).上述兩個(gè)極端條件均滿足時(shí),所有正常節(jié)點(diǎn)位置重合,即pi(t)-pj(t)=0,i,j ∈R.如果要實(shí)現(xiàn)Dmax(t+1)=Dmax(t),則?pi(t+1)=pi(t),i,j∈R.這代表所有正常節(jié)點(diǎn)在該時(shí)刻均沒(méi)有位移能力,因此沒(méi)有發(fā)生實(shí)際位移.這與位移能力的定義矛盾,因?yàn)橹挥性谒姓9?jié)點(diǎn)都收斂于源點(diǎn)時(shí),所有節(jié)點(diǎn)的位移能力才都為零.因此即使在任意兩個(gè)向量pa(t)與pb(t) 之間的夾角為零以及所有的正常節(jié)點(diǎn)到源點(diǎn) o 的距離相等同時(shí)滿足的情況下,除非所有正常節(jié)點(diǎn)都收斂于源點(diǎn)(即尋源成功),否則依然有Dmax(t+1)<Dmax(t).
綜上所述,Dmax(t) 為關(guān)于t的嚴(yán)格遞減函數(shù).Dmax(t) 的實(shí)際含義為距離,因此Dmax(t)≥0 恒成立.所以limt→∞‖pmax(t)-o‖=limt→∞‖Dmax(t)‖=0.由‖pi(t)‖≤‖pmax(t)‖,?i ∈R可 得limt→∞‖pi(t)-o‖=0,?i ∈R.
2.4 擾動(dòng)分析
接下來(lái)討論在彈性向量協(xié)同尋源方法添加擾動(dòng)項(xiàng)的情況下多機(jī)器人系統(tǒng)的收斂性能,在式 (5) 中添加擾動(dòng)項(xiàng) Ωi(t),如下所示
考慮到添加擾動(dòng)后會(huì)使引理4 和引理5 失效,故而引入水平集f-1(c)={p|?f(p)=c},將之前機(jī)器人節(jié)點(diǎn)實(shí)際坐標(biāo)的凸包隨著迭代時(shí)間不斷縮小而趨近源點(diǎn)改為機(jī)器人節(jié)點(diǎn)實(shí)際坐標(biāo)所在水平集的凸包隨著迭代時(shí)間不斷縮小而趨近源點(diǎn).
定義 3 (水平集).在標(biāo)量場(chǎng)中,水平集是指空間中所有場(chǎng)強(qiáng)相等的坐標(biāo)集合,即f-1(c)={p|?f(p)=c},當(dāng)標(biāo)量場(chǎng)值域?yàn)槎S情況下也可稱水平集為等高線.
當(dāng)標(biāo)量場(chǎng)中只存在唯一極大值點(diǎn)時(shí),標(biāo)量場(chǎng)映射函數(shù)具有強(qiáng)凸性,所以當(dāng)c1<c2時(shí),conv(f-1(c1))包含conv(f-1(c2)) 且所有水平集的凸包均包含該極大值點(diǎn) (源點(diǎn)o).
定理 2.當(dāng)且僅當(dāng)多機(jī)器人系統(tǒng)的通信拓?fù)錆M足m(d+1)-魯棒圖時(shí),在系統(tǒng)擾動(dòng)項(xiàng) Ωi(t) 滿足Ωi(t)<xi(t)的情況下,正常機(jī)器人在彈性協(xié)同尋源方法的控制下最終能收斂到源點(diǎn) o.
3 數(shù)值仿真
3.1 軌跡仿真實(shí)驗(yàn)
實(shí)驗(yàn)?zāi)M二維平面中5 個(gè)節(jié)點(diǎn)V={v1,v2,v3,v4,v5}應(yīng)用多維彈性尋源方法尋找未知環(huán)境中的源點(diǎn)位置,節(jié)點(diǎn)的初始位置分別為:p1(0)=(-89,-10),p2(0)=(-50,70),p3(0)=(70,70),p4(0)=(84,-10),p5(0)=(33,-70),其中v5是惡意節(jié)點(diǎn)并用以下更新方程來(lái)更新自己的廣播值從而實(shí)現(xiàn)虛假數(shù)據(jù)信息注入的攻擊行為:(t)=(15 sin(2t)+1.5t+33,2t-70),單位為m.每個(gè)機(jī)器人節(jié)點(diǎn)的位移能力設(shè)為3 m/s,更大的數(shù)值能有效縮短尋源成功所需的迭代次數(shù).
未知環(huán)境標(biāo)量場(chǎng)中的信號(hào)強(qiáng)度分布公式被設(shè)置為:f(p)=-px2-py2,信號(hào)強(qiáng)度分布情況如圖2(a)等高線所示.
節(jié)點(diǎn)之間的通信拓?fù)潢P(guān)系如圖4 所示,圖中拓?fù)溥B通性達(dá)到了3-魯棒圖,在d=2,m=1 條件下,通信拓?fù)溥B通性滿足定理2 條件,即滿足d(m+1)-魯棒圖條件.根據(jù)數(shù)理分析得到的充分必要條件,這意味著在任意步時(shí)的每個(gè)正常節(jié)點(diǎn)所計(jì)算的安全區(qū)域皆不為空.同時(shí)也表明通信拓?fù)溥_(dá)到了定理1所需要的條件,最終正常節(jié)點(diǎn)會(huì)收斂于源點(diǎn).在二維環(huán)境條件和本地惡意節(jié)點(diǎn)上限為1 的情況下,本方法所需的網(wǎng)絡(luò)連通性條件與標(biāo)量協(xié)議相同,但是卻擁有安全區(qū)間更為嚴(yán)格精確的優(yōu)點(diǎn),能抵御更大范圍的惡意攻擊.反映節(jié)點(diǎn)之間通信關(guān)系的鄰接矩陣如下

圖4 節(jié)點(diǎn)之間的通信(有向圖)Fig.4 Communication between nodes (Directed graph)
實(shí)驗(yàn)結(jié)果如圖5 所示,雖然惡意節(jié)點(diǎn)隨意更新自己的狀態(tài)值 (如紅色軌跡所示) 并通過(guò)廣播給鄰居惡意引導(dǎo)其他節(jié)點(diǎn),但是正常節(jié)點(diǎn)依然能正常收斂到源點(diǎn)位置.可以看到正常節(jié)點(diǎn)由于受到惡意節(jié)點(diǎn)的惡意引導(dǎo),其移動(dòng)軌跡稍微往紅色的惡意節(jié)點(diǎn)信息量廣播軌跡偏移了一些,但是在彈性向量協(xié)同尋源方法的修正下依然收斂于源點(diǎn).
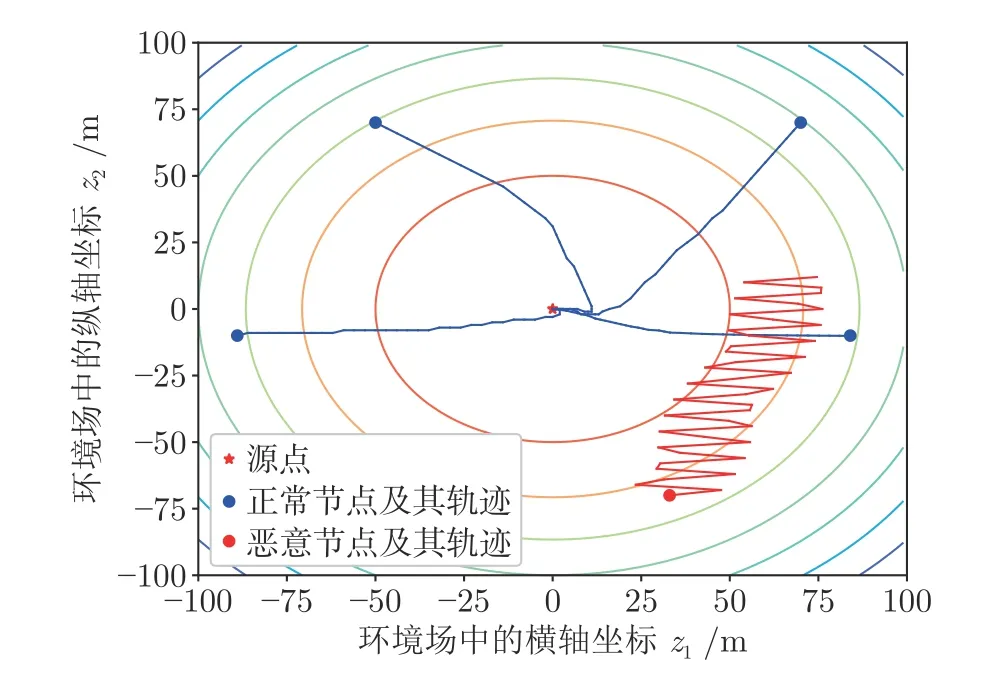
圖5 t=35 時(shí)使用彈性向量協(xié)同尋源方法的尋源軌跡Fig.5 The source seeking trajectories of resilient vector cooperative source seeking at t=35
3.2 安全區(qū)間仿真實(shí)驗(yàn)
接下來(lái)觀察安全區(qū)域與正常節(jié)點(diǎn)位置和源點(diǎn)位置之間的關(guān)系.根據(jù)數(shù)理分析的理論預(yù)測(cè)結(jié)果,安全區(qū)域應(yīng)該包含于正常節(jié)點(diǎn)位置并上源點(diǎn)位置的凸包內(nèi).圖6 展示了t分別等于10、20 時(shí)安全區(qū)域與正常節(jié)點(diǎn)位置并上源點(diǎn)位置的凸包之間的關(guān)系.圖中紅色五角星為源點(diǎn)位置,藍(lán)色點(diǎn)為正常節(jié)點(diǎn)實(shí)際位置,紅色點(diǎn)為惡意節(jié)點(diǎn)所廣播的虛擬位置.可以看到淺藍(lán)色區(qū)域代表的安全區(qū)域包含于黑色多邊形代表的正常節(jié)點(diǎn)位置并上源點(diǎn)位置的凸包內(nèi),實(shí)驗(yàn)結(jié)果與數(shù)理分析的理論預(yù)測(cè)保持一致.

圖6 t=10 和 t=20 時(shí) v3 計(jì)算的安全區(qū)域和正常節(jié)點(diǎn)真實(shí)坐標(biāo)并上源點(diǎn)位置的凸包Fig.6 The safe area calculated by v3 and the convex hull area of the real coordinates of the normal nodes with the source point position at t=10 and t=20
需要注意的是,在源點(diǎn)包含于正常節(jié)點(diǎn)實(shí)際位置所構(gòu)成的凸包內(nèi)時(shí),正常節(jié)點(diǎn)實(shí)際位置并上源點(diǎn)位置所構(gòu)成的凸包實(shí)際上等同于正常節(jié)點(diǎn)實(shí)際位置構(gòu)成的凸包.根據(jù)圖3 所表示的步驟2)中關(guān)于凸包相交的結(jié)果,安全區(qū)域理應(yīng)至少有一條邊與正常節(jié)點(diǎn)信息量所構(gòu)成的凸包的一條邊重合.然而圖6 中并未重合的原因是,黑色多邊形代表的是節(jié)點(diǎn)實(shí)際坐標(biāo)并上源點(diǎn)的凸包,而用來(lái)計(jì)算安全區(qū)域的數(shù)據(jù)是正常節(jié)點(diǎn)所廣播的信息量,二者之間的區(qū)別和聯(lián)系詳見(jiàn)彈性向量尋源方法的步驟1).
3.3 收斂過(guò)程仿真實(shí)驗(yàn)
接下來(lái)的實(shí)驗(yàn)主要關(guān)注正常節(jié)點(diǎn)的收斂過(guò)程.如圖7 所示,縱坐標(biāo)代表正常節(jié)點(diǎn)真實(shí)坐標(biāo)并上源點(diǎn)位置的凸包面積,橫坐標(biāo)代表迭代步時(shí).可以看到凸包面積隨著迭代而不斷減小并且最終趨于零,即該凸包內(nèi)包含的節(jié)點(diǎn)坐標(biāo)都將收斂于一點(diǎn).注意該凸包內(nèi)包含源點(diǎn),所以這意味著當(dāng)凸包面積為零時(shí),凸包內(nèi)包含的節(jié)點(diǎn)坐標(biāo)必定收斂于源點(diǎn).

圖7 正常節(jié)點(diǎn)真實(shí)坐標(biāo)并上源點(diǎn)位置的凸包面積隨迭代步時(shí) t 的變化關(guān)系Fig.7 The relation between the convex hull area of the real coordinates of the normal nodes with the source point position and the number of iteration t
為了進(jìn)一步觀察正常節(jié)點(diǎn)的收斂過(guò)程,圖8 展示了正常節(jié)點(diǎn)中離源點(diǎn)的最遠(yuǎn)距離隨迭代步時(shí)的變化關(guān)系.根據(jù)定理3 的結(jié)論,正常節(jié)點(diǎn)中離源點(diǎn)最遠(yuǎn)的距離Dmax(t) 是一個(gè)隨t嚴(yán)格遞減的函數(shù)并且最終會(huì)收斂于零.由圖8 可見(jiàn),Dmax(t) 實(shí)驗(yàn)結(jié)果與理論預(yù)測(cè)保持一致.值得討論的是,每一步時(shí)正常節(jié)點(diǎn)中距離源點(diǎn)最遠(yuǎn)的節(jié)點(diǎn)可能并非同一個(gè)節(jié)點(diǎn),特別是當(dāng)各個(gè)節(jié)點(diǎn)之間的位移能力出現(xiàn)明顯差距時(shí),這種情況尤為顯著.如果出現(xiàn)這樣的情況,那么可能會(huì)導(dǎo)致某個(gè)步時(shí)Dmax(t) 出現(xiàn)斷層.盡管如此,根據(jù)定理3 的數(shù)理分析,Dmax(t) 雖然會(huì)出現(xiàn)斷層現(xiàn)象,但是依然保持嚴(yán)格單調(diào)遞減的性質(zhì),因此結(jié)論依然成立.

圖8 距離源點(diǎn)最遠(yuǎn)的節(jié)點(diǎn)與源點(diǎn)之間的距離隨迭代步時(shí) t 的變化關(guān)系Fig.8 Relationship between the number of iterationt and the distance between the source point and the node farthest from the source point
3.4 對(duì)比仿真實(shí)驗(yàn)
首先,為了體現(xiàn)彈性向量協(xié)同尋源方法中安全區(qū)域的計(jì)算在安全性能上的優(yōu)勢(shì),在未采用彈性向量協(xié)同尋源方法步驟2)的情況下,以與圖5 相同的實(shí)驗(yàn)參數(shù)進(jìn)行尋源模擬仿真實(shí)驗(yàn).實(shí)驗(yàn)結(jié)果如圖9所示,可以看到正常節(jié)點(diǎn)受到惡意節(jié)點(diǎn)的影響從而無(wú)法尋源成功甚至難以收斂.

圖9 未采用計(jì)算安全區(qū)域方法的尋源軌跡Fig.9 The source seeking trajectories without calculation of safe area method
此外,為了體現(xiàn)向量趨同算法在多維平面中的優(yōu)勢(shì),對(duì)比觀察尋源過(guò)程中,正常節(jié)點(diǎn)廣播坐標(biāo)的標(biāo)量協(xié)議安全區(qū)間面積與向量協(xié)議安全區(qū)間面積隨迭代步時(shí)變化的關(guān)系.前者為正常節(jié)點(diǎn)所廣播的信息量投影在各個(gè)維度上的最大值與最小值之間的區(qū)域面積,后者為信息量的凸包的面積,二者定義和區(qū)別詳見(jiàn)圖1.如圖10 所示,藍(lán)色曲線代表的向量協(xié)議安全區(qū)間面積總是小于橙色曲線代表的標(biāo)量協(xié)議安全區(qū)間面積,這體現(xiàn)了本文所提出的彈性向量協(xié)同尋源方法所定義的安全區(qū)間更為嚴(yán)格準(zhǔn)確的優(yōu)勢(shì).

圖10 基于彈性標(biāo)量協(xié)議和基于本文所提方法的安全區(qū)間面積隨迭代步時(shí) t 變化關(guān)系Fig.10 The relationship between the number of iteration t and the area of the safe interval based on the resilient scalar protocol and the method proposed in this paper
另一方面,為了體現(xiàn)添加擾動(dòng)對(duì)使用彈性向量協(xié)同尋源方法的多機(jī)器人系統(tǒng)的影響,仿真模擬在添加小于xi(t) 的擾動(dòng)項(xiàng)的情況下,以與圖5 相同的實(shí)驗(yàn)參數(shù)進(jìn)行尋源模擬仿真實(shí)驗(yàn).實(shí)驗(yàn)結(jié)果如圖11所示,可以看到正常節(jié)點(diǎn)雖然在擾動(dòng)的干擾下軌跡的平滑程度有所下降,但是依然能收斂到源點(diǎn)附近,實(shí)現(xiàn)尋源目標(biāo).
圖11 添加干擾情況下的尋源軌跡Fig.11 The source seeking trajectories with disturbance
最后,與現(xiàn)有方法進(jìn)行對(duì)比實(shí)驗(yàn).文獻(xiàn)[15]基于PSO&MSR 設(shè)計(jì)的彈性協(xié)同尋源方法在與圖5相同參數(shù)情況下的尋源軌跡如圖12 所示,可以看到在與圖5 相同的迭代步時(shí)內(nèi),其基本達(dá)成尋源目標(biāo).然而,這種機(jī)器人節(jié)點(diǎn)初始位置均勻地分布在源點(diǎn)各個(gè)方向有利于基于PSO 算法的多機(jī)器人系統(tǒng)協(xié)同尋源.如圖13 和圖14 所示,當(dāng)機(jī)器人節(jié)點(diǎn)初始位置分布在源點(diǎn)某一側(cè) (機(jī)器人節(jié)點(diǎn)初始坐標(biāo)所構(gòu)成的凸包不包含源點(diǎn)) 時(shí),彈性向量協(xié)同尋源方法在收斂速率上的表現(xiàn)優(yōu)于基于PSO 算法的彈性協(xié)同尋源方法.

圖12 t=35 時(shí)基于PSO&MSR 的尋源軌跡[15]Fig.12 The source seeking trajectories based on PSO&MSR at t=35 [15]

圖13 當(dāng)機(jī)器人節(jié)點(diǎn)初始位置在源點(diǎn)同一側(cè)的情況下使用本文方法在 t=30 和 t=45 時(shí)的尋源軌跡Fig.13 The source seeking trajectories based on the proposed method when the initial positions of the robot nodes are on the same side as the source point at t=30 and t=45

圖14 當(dāng)機(jī)器人節(jié)點(diǎn)初始位置在源點(diǎn)同一側(cè)的情況下使用基于PSO&MSR 的方法在t=30 和 t=45 時(shí)的尋源軌跡Fig.14 The source seeking trajectories based on PSO&MSR when the initial positions of the robot nodes are on the same side as the source point at t=30 and t=45
4 結(jié)論
本文針對(duì)多機(jī)器人系統(tǒng)在執(zhí)行尋源任務(wù)過(guò)程中,容易受到虛假數(shù)據(jù)注入攻擊而導(dǎo)致任務(wù)失敗的問(wèn)題,提出了一種基于向量趨同的彈性協(xié)同尋源方法,在節(jié)點(diǎn)鄰居中存在一定上限的惡意節(jié)點(diǎn)時(shí)依然能成功實(shí)現(xiàn)尋源.不同于一般的彈性算法對(duì)安全區(qū)間的界定往往采用初始狀態(tài)值的上下限,本文提出的方法所界定的安全區(qū)間更為嚴(yán)格準(zhǔn)確,符合多維情況下對(duì)安全區(qū)間的要求,也能抵御更大范圍的虛假數(shù)據(jù)注入攻擊.通過(guò)數(shù)理分析證明了在存在虛假信息注入攻擊的情況下該方法的收斂性能,并且給出了使用本文提出方法的充要條件.最后,通過(guò)數(shù)值仿真實(shí)驗(yàn)驗(yàn)證了所提方法的有效性.
然而,本文目前研究設(shè)計(jì)的彈性向量協(xié)同尋源方法還存在一定不足,值得在進(jìn)一步的研究中進(jìn)行改進(jìn).第一,由于缺乏全局視野和優(yōu)化策略,本文所提方法雖然能在單源環(huán)境下實(shí)現(xiàn)安全尋源,但是在多源環(huán)境中的尋源表現(xiàn)不盡人意,因此接下來(lái)的研究將進(jìn)一步挖掘在多源環(huán)境下的尋源潛力;第二,在凸包相交算法中,當(dāng)機(jī)器人一次迭代前后的位移距離過(guò)小時(shí),其對(duì)凸包相交結(jié)果影響甚微,因此后續(xù)的研究可能考慮事件觸發(fā)機(jī)制,以節(jié)約通信成本和能量損耗.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
兒童故事畫(huà)報(bào)(2019年5期)2019-05-26 14:26:14
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
