基于微分平坦的高超聲速飛行器跟蹤控制方法
2024-03-05 10:33:02趙昱宇王雨瀟
系統(tǒng)工程與電子技術(shù) 2024年3期
趙昱宇, 索 超, 王雨瀟
(中國(guó)民航大學(xué)電子信息與自動(dòng)化學(xué)院, 天津 300300)
0 引 言

然而,高超聲速飛行器模型具有強(qiáng)不確定性,反饋線性化等方法的過度模型依賴會(huì)導(dǎo)致系統(tǒng)魯棒性下降。自抗擾控制(active disturbance rejection control,ADRC)利用擴(kuò)張狀態(tài)觀測(cè)器(extended state observer,ESO)估計(jì)系統(tǒng)總擾動(dòng),并利用非線性反饋控制律進(jìn)行擾動(dòng)補(bǔ)償。由于其弱模型依賴、魯棒性強(qiáng)等特點(diǎn),ADRC在不確定系統(tǒng)的控制設(shè)計(jì)中得到了廣泛的應(yīng)用[11]。文獻(xiàn)[11]利用ADRC的無模型信息特性提高了分布式電源逆變器的魯棒性。文獻(xiàn)[12]將反步法結(jié)合ADRC實(shí)現(xiàn)了不確定分?jǐn)?shù)階系統(tǒng)的跟蹤控制。特別地,針對(duì)飛行器控制問題,文獻(xiàn)[13]提出一種改進(jìn)ADRC控制方法,實(shí)現(xiàn)了小型無人直升機(jī)姿態(tài)控制。進(jìn)一步地,文獻(xiàn)[14]對(duì)ADRC方法進(jìn)行了性能分析,通過提出疲勞度的概念驗(yàn)證了ADRC的性能優(yōu)越性。文獻(xiàn)[15]在ADRC基礎(chǔ)上應(yīng)用了前饋控制,實(shí)現(xiàn)了飛行器高度的快速調(diào)節(jié),其中所提出的穩(wěn)定裕度測(cè)試子對(duì)于ADRC頻域穩(wěn)定性分析具有較大的理論指導(dǎo)意義,可以實(shí)現(xiàn)參數(shù)的快速整定。但在高超聲速飛行器的軌跡跟蹤控制問題中,系統(tǒng)階數(shù)較高,需要使用高階ESO來觀測(cè)系統(tǒng)狀態(tài)或構(gòu)建串級(jí)ADRC來分別實(shí)現(xiàn)內(nèi)外環(huán)控制[16-17],其控制性能與廣泛應(yīng)用的二階ADRC姿控系統(tǒng)具有一定的差距。此外,高超聲速飛行器飛行走廊較為狹窄,需要在控制過程中考慮狀態(tài)和控制輸入等多約束問題[18],飛行狀態(tài)的越界可能帶來系統(tǒng)失穩(wěn)或發(fā)動(dòng)機(jī)熄火等問題[19]。因此,需要一種綜合控制方法來實(shí)現(xiàn)多約束下的高超聲速飛行器穩(wěn)定軌跡跟蹤。
微分平坦[20]在處理非線性系統(tǒng)問題上具有計(jì)算量小、計(jì)算效率高等特點(diǎn)[21-22]。由于微分平坦可以實(shí)現(xiàn)狀態(tài)和控制輸入到平坦輸出的映射,因此在處理帶有狀態(tài)約束等控制和規(guī)劃問題上具有優(yōu)勢(shì)。文獻(xiàn)[23]基于微分平坦理論,結(jié)合樣條函數(shù)等參數(shù)化平坦輸出,實(shí)現(xiàn)姿態(tài)機(jī)動(dòng)可行路徑的快速規(guī)劃。文獻(xiàn)[24]采用全局插值多項(xiàng)式參數(shù)化平坦輸出函數(shù)完成參考軌跡優(yōu)化,并設(shè)計(jì)比例-微分(proportional-derivative, PD)控制律實(shí)現(xiàn)了多約束條件下高超聲速飛行器的軌跡穩(wěn)定跟蹤。但微分平坦計(jì)算過程依賴精確的模型推導(dǎo),且產(chǎn)生高階微分信號(hào),因此高相對(duì)階和不確定模型應(yīng)用微分平坦時(shí)的抗干擾性能和魯棒性較差。
綜上所述,對(duì)于高超聲速飛行器軌跡跟蹤控制問題,存在多約束條件、系統(tǒng)控制相對(duì)階、氣動(dòng)參數(shù)不確定性強(qiáng)等特點(diǎn)。因此,考慮利用微分平坦對(duì)速度、高度動(dòng)態(tài)進(jìn)行微分映射,高度通道保留俯仰角作為中間控制量,而利用ADRC完成姿態(tài)跟蹤。微分平坦所得到的平坦映射可以在平坦輸出上反映系統(tǒng)過程狀態(tài)信息,實(shí)現(xiàn)考慮過程約束的參考軌跡優(yōu)化降維,姿控系統(tǒng)的保留使得推導(dǎo)相對(duì)階數(shù)減小,不會(huì)產(chǎn)生高階微分信號(hào)導(dǎo)致魯棒性變差,也不會(huì)過度依賴不確定性較強(qiáng)的氣動(dòng)參數(shù)信息。而ADRC在姿控系統(tǒng)上的應(yīng)用不需要處理俯仰角-高度動(dòng)態(tài),僅需設(shè)計(jì)二階ESO,跟蹤效果及魯棒性較好。通過高超聲速飛行器縱向軌跡跟蹤仿真對(duì)所提出方法與現(xiàn)有方法的性能進(jìn)行了比較,驗(yàn)證了基于微分平坦的高超聲速飛行器跟蹤控制方法的有效性。
1 模型描述
研究對(duì)象為有翼錐形體高超聲速飛行器,其縱向動(dòng)力學(xué)模型描述如下[25]:
(1)
系統(tǒng)有5個(gè)狀態(tài)[V,r,γ,θ,q]T,和2個(gè)控制量[Φ,δe]T。其中V為速度,r為地心距(r=R+h,其中R為地球半徑,h為高度),γ為彈道傾角,θ為俯仰角,q為俯仰角速率,Φ為燃油節(jié)流率,δe為升降舵。
推力T,阻力D, 升力L,俯仰力矩Myy擬合如下所示:
(2)
式中:相關(guān)的氣動(dòng)系數(shù)表達(dá)式為
(3)
(4)
(5)
CM=CM,α(α)+CM,δe(α,δe)+CM,q(q,α)
(6)
(7)
CM,δe(α,δe)=ce(δe-α)
(8)
(9)
2 基于微分平坦的控制系統(tǒng)設(shè)計(jì)
2.1 理論介紹
微分平坦理論是針對(duì)非線性系統(tǒng)所提出的一種線性化理論。其內(nèi)容為,若存在至少一組平坦輸出,使得非線性模型可以被線性化,即非線性系統(tǒng)中的所有狀態(tài)和控制輸入變量都能夠由這組平坦輸出及其有限階微分表達(dá),那么稱該系統(tǒng)是微分平坦的[26]。
微分平坦理論是將非線性動(dòng)態(tài)方程中的非線性特性分離出來,將動(dòng)態(tài)非線性系統(tǒng)映射為非線性靜態(tài)方程和線性動(dòng)態(tài)方程的組合,從而實(shí)現(xiàn)非線性系統(tǒng)的線性化,示意圖如圖1所示。
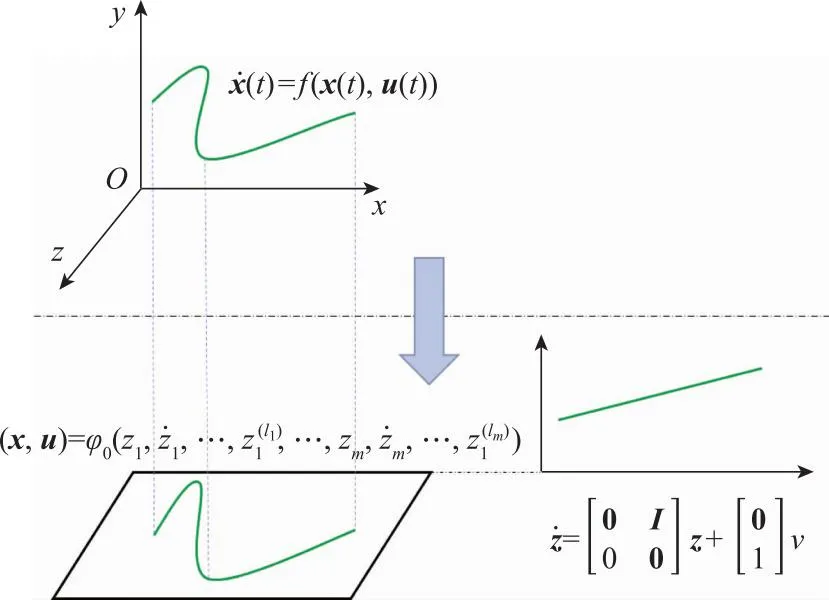
圖1 微分平坦理論映射示意圖Fig.1 Mapping diagram of differential flatness theory
若非線性系統(tǒng)
(10)
是微分平坦的,那么存在一組輸出z∈Rm滿足
zi=hi(x,u,…,u(ri)),i=1,2,…,m
(11)
使得系統(tǒng)的狀態(tài)、控制輸入和原輸出都可以用輸出z及其有限階導(dǎo)數(shù)表示,即
(12)
式中:x∈Rn為狀態(tài)變量,u∈Rm為控制輸入;f(·)、h(·)為連續(xù)光滑函數(shù)。
因此,若系統(tǒng)是微分平坦的,則可以通過規(guī)劃的期望平坦輸出得到標(biāo)稱條件下所有狀態(tài)及控制輸入理想值。對(duì)于高超聲速飛行器具有狀態(tài)約束、控制輸入約束的控制對(duì)象,微分平坦可以將輸出軌跡信息映射到狀態(tài)和輸入上,以此解決帶有約束的輸出軌跡優(yōu)化及跟蹤控制問題。
2.2 平坦輸出規(guī)劃與跟蹤控制
一般情況下,高超聲速飛行器具有較為狹窄的飛行走廊,通常設(shè)計(jì)控制器時(shí)需要考慮動(dòng)力學(xué)方程、狀態(tài)與控制輸入物理限制等多重約束條件,確定一條從初始狀態(tài)到期望終端狀態(tài)的控制軌跡,使得控制過程中系統(tǒng)滿足約束條件,并達(dá)到期望性能指標(biāo),其數(shù)學(xué)描述如問題1 所示。
問題 1針對(duì)動(dòng)態(tài)方程組,尋找狀態(tài)變量-控制變量函數(shù)組{x(t),u(t)}(t∈[t0,tf])使得性能指標(biāo)滿足:

(13)
同時(shí)滿足邊界條件、控制飽和約束:
|u(t)|≤umax
(14)
|x(t)|≤xmax
(15)
式中:x(t)為狀態(tài)變量;u(t)為控制變量;L(*)為性能指標(biāo)計(jì)算函數(shù);J*為期望性能指標(biāo)。問題1包含對(duì)于微分方程的狀態(tài)約束,規(guī)劃空間維數(shù)較高,求解難度較大。
利用第2.1節(jié)微分平坦理論可將系統(tǒng)狀態(tài)、控制輸入等映射為平坦輸出,一方面可以實(shí)現(xiàn)系統(tǒng)狀態(tài)與控制約束到平坦輸出約束的降維轉(zhuǎn)化,另一方面可實(shí)現(xiàn)系統(tǒng)線性化,以進(jìn)行跟蹤控制系統(tǒng)設(shè)計(jì)。
由于姿控子系統(tǒng)存在較大不確定性,而微分平坦需要系統(tǒng)精確模型推導(dǎo),因此高度回路僅將俯仰角-高度動(dòng)態(tài)進(jìn)行微分平坦變換,姿態(tài)跟蹤利用ADRC實(shí)現(xiàn),以此增強(qiáng)系統(tǒng)魯棒性并避免微分推導(dǎo)爆炸問題。控制系統(tǒng)總結(jié)構(gòu)框圖如圖2所示。

圖2 基于微分平坦的控制系統(tǒng)框圖Fig.2 Control system diagram based on differential flatness
外環(huán)子系統(tǒng)動(dòng)力學(xué)模型為
(16)
特別地,俯仰角θ在外環(huán)子系統(tǒng)為中間控制變量。針對(duì)高超聲速飛行器外環(huán)模型,設(shè)計(jì)控制器完成期望輸出狀態(tài)的跟蹤。
下面利用微分平坦理論對(duì)動(dòng)力學(xué)方程進(jìn)行平坦化處理。
選擇飛行器狀態(tài)變量速度V和地心距r作為平坦輸出
(17)
根據(jù)微分平坦理論,需要通過推導(dǎo)將狀態(tài)量[V,r,γ,α,q]T和控制量[Φ,δe]T用平坦輸出量[z1,z2]T及其導(dǎo)數(shù)表達(dá)。
首先,可以根據(jù)模型中的地心距動(dòng)力學(xué)方程解得
(18)
進(jìn)一步地,對(duì)其求微分可得
(19)
至此已得到全部3個(gè)狀態(tài)量的平坦輸出表達(dá),下面求取控制量的平坦輸出表達(dá)式。
華昌化工植物營(yíng)養(yǎng)中心農(nóng)化專員姜在利從示范田和對(duì)比田分別選取了一株玉米,現(xiàn)場(chǎng)進(jìn)行對(duì)比實(shí)驗(yàn)。華昌玉米樣板田底肥施用了鋅硼友(27-7-9)免追肥。和普通田塊對(duì)比非常明顯,示范田根冠32cm,莖稈5cm,而普通田根冠25cm,莖稈3cm。華昌示范田根系發(fā)達(dá)、莖稈粗壯,有效增加了肥料利用率,大大減少了養(yǎng)分流失。現(xiàn)場(chǎng)也可以直接看到華昌示范田玉米葉片更加肥厚,果穗也更加粗壯飽滿,有明顯的增產(chǎn)增收效果。零售商和種植大戶對(duì)華昌產(chǎn)品的品質(zhì)和使用效果給予了很大的肯定。而他們的評(píng)價(jià)也是華昌眾多用戶共同的心聲。

將式(17)~式(19)代入模型中:
(20)
其中,
(21)
解得攻角的平坦輸出表達(dá)式:
(22)
其中,
(23)
可得
(24)
為了實(shí)現(xiàn)俯仰角速率約束,對(duì)式(24)求導(dǎo),得到
(25)
式中:
(26)
T=mΔ3+Δ4
(27)
式中:
(28)
節(jié)流率表達(dá)式為
(29)
綜合式(17)、式(18)、式(22)、式(29),外環(huán)子系統(tǒng)的狀態(tài)、控制輸入和原輸出都可以用平坦輸出z及其有限階導(dǎo)數(shù)表示為
(30)
式中:x=[V,h,γ]T;u=[θ,φ]T;f(·)=[fx(·)fu(·)]T。
至此,外環(huán)非線性系統(tǒng)的狀態(tài)及控制輸入已通過微分平坦理論映射為2個(gè)平坦輸出動(dòng)態(tài)。因此,只需要規(guī)劃合理的平坦輸出動(dòng)態(tài),即可得到所需外環(huán)控制輸入,得到理想的系統(tǒng)動(dòng)態(tài)。
可以在最優(yōu)控制理論框架下構(gòu)建飛行器運(yùn)動(dòng)軌跡規(guī)劃模型: 在動(dòng)力學(xué)方程、狀態(tài)與控制輸入物理限制等多種約束條件下,確定一條從初始狀態(tài)到期望終端狀態(tài)的轉(zhuǎn)移軌跡,使得指定的性能指標(biāo)最優(yōu),選取最節(jié)能即過程控制量最小為性能指標(biāo),則其數(shù)學(xué)描述如問題2所示。
問題 2求解平坦輸出z(t)(t∈[t0,tf])可以最小化性能指標(biāo):
(31)
同時(shí)滿足初始終端條件、邊界約束、控制飽和約束:
{z(t0)=z0
z(tf)=zf
(32)
|fu(z(t))|≤umax
(33)
|fx(z(t))|≤Cmax
(34)
由此可見,相較于問題1,問題2 避免了微分方程的約束,同時(shí)降低了規(guī)劃空間維數(shù),使得轉(zhuǎn)換所得的問題更易求解,計(jì)算效率更高。
利用參數(shù)化平坦輸出的映射Chebyshev偽譜法[27]將平坦輸出規(guī)劃問題轉(zhuǎn)化為非線性規(guī)劃問題求解。確定平坦輸出在映射CGL(Chebyshev-Gauss-Lobatto)點(diǎn)處取值z(mì)(λk)(k=0,1,…,N)以及期望終端時(shí)刻tf,使得性能指標(biāo)滿足,同時(shí)滿足初始終端條件、邊界約束、控制飽和約束:
(35)
-umax≤fu(z(λk))≤umax
(36)
fx(z(λk))≤Cmax
(37)
得到最優(yōu)平坦輸出序列zr(λk)(k=0,1,…,N)后,利用重心Lagrange插值法可以獲得平坦輸出隨時(shí)間變化關(guān)系z(mì)r(t)(t∈[t0,tf])。
求解規(guī)劃期望平坦輸出后,構(gòu)建線性系統(tǒng)
(38)

構(gòu)建反饋跟蹤控制律:
(39)

3 基于ADRC的姿態(tài)跟蹤控制
針對(duì)內(nèi)環(huán)子系統(tǒng),結(jié)合系統(tǒng)氣動(dòng)表達(dá)式可得內(nèi)環(huán)縱向姿控動(dòng)力學(xué)方程:
(40)
定義如下擴(kuò)張狀態(tài)等系統(tǒng)定義:
(41)
系統(tǒng)可以寫為
(42)

構(gòu)建ESO:
(43)
式中:L=[l1,l2]T為ESO增益參數(shù)。
觀測(cè)器可以實(shí)現(xiàn)系統(tǒng)的狀態(tài)估計(jì),特別地,觀測(cè)器狀態(tài)z2可以跟蹤擴(kuò)張狀態(tài)x2。為了進(jìn)一步減少控制參數(shù),降低控制參數(shù)整定難度,觀測(cè)器增益系數(shù)定義為
(44)
式中:ω0為觀測(cè)器帶寬。至此觀測(cè)器中只有唯一待設(shè)計(jì)參數(shù)ω0,這極大地降低了參數(shù)整定的復(fù)雜度,為控制系統(tǒng)設(shè)計(jì)提供了方便。
設(shè)計(jì)控制輸入:
(45)
式中:z2為x2的估計(jì)值。若觀測(cè)器達(dá)到穩(wěn)態(tài),實(shí)現(xiàn)了狀態(tài)估計(jì),那么可以得到原姿控系統(tǒng)動(dòng)態(tài)為
(46)
這里將偽控制量u0設(shè)計(jì)為PD形式:
(47)
式中:θc為期望俯仰角。
結(jié)合式(45)和式(47),得到線性ADRC控制律為
(48)
文獻(xiàn)[28]給出了線性ADRC穩(wěn)定性和魯棒性的頻域分析。控制器分為兩大組成部分:一是利用ESO估計(jì)系統(tǒng)總擾動(dòng),不依賴于精確的模型信息,使得系統(tǒng)魯棒性得到提高;二是利用補(bǔ)償后的PD反饋控制律完成跟蹤控制,既繼承了傳統(tǒng)PID控制直觀、穩(wěn)定、有效的優(yōu)勢(shì),又在此基礎(chǔ)上極大地優(yōu)化了控制系統(tǒng)性能。
微分平坦和ADRC結(jié)合的綜合控制方法確保了外環(huán)的控制精度,利用了微分平坦的特性指導(dǎo)了軌跡規(guī)劃,優(yōu)化外環(huán)控制性能。與此同時(shí)內(nèi)環(huán)結(jié)合ADRC方法避免了整個(gè)系統(tǒng)利用微分平坦推導(dǎo)的微分爆炸,以及嚴(yán)重的模型依賴問題。利用了ADRC的強(qiáng)魯棒性,并避免了串級(jí)ESO的出現(xiàn),改善系統(tǒng)性能。
4 仿真分析
為了驗(yàn)證所提出控制方法的有效性,采用第3節(jié)所設(shè)計(jì)的控制器,以高超聲速飛行器模型作為控制對(duì)象,進(jìn)行閉環(huán)仿真。
首先設(shè)置模型參數(shù)及初始條件如表1所示。
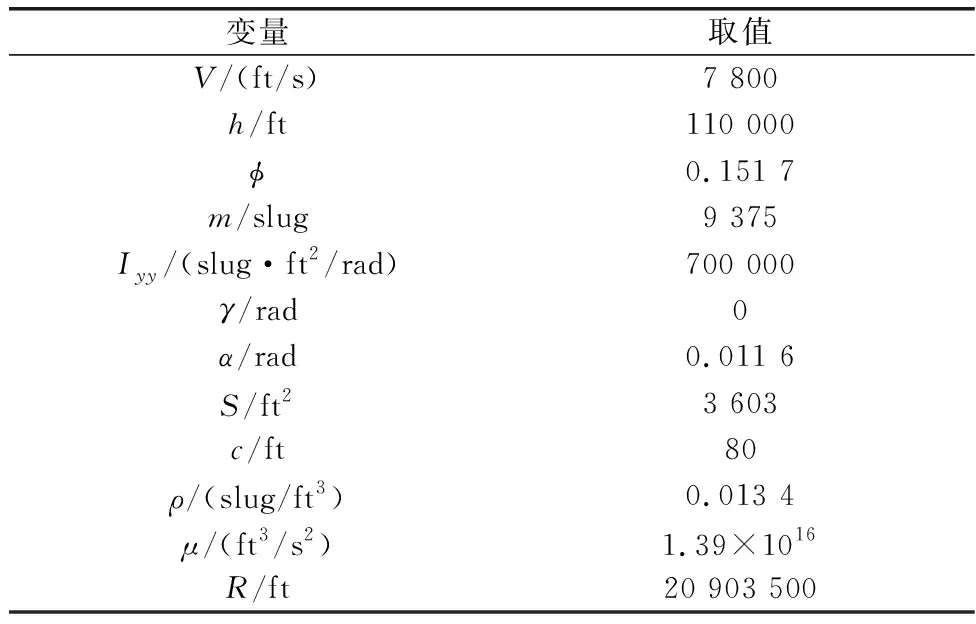
表1 模型參數(shù)及初始條件Table 1 Model parameters and initial conditions

通過微分平坦理論對(duì)模型平坦線性化處理,并采用映射Chebyshev偽譜法參數(shù)化平坦輸出,對(duì)最終轉(zhuǎn)換所得非線性規(guī)劃問題,調(diào)用fmincon函數(shù)進(jìn)行求解,其參數(shù)TolFun、TolX和TolCon均設(shè)置為10-6。
依據(jù)性能指標(biāo)規(guī)劃所得飛行器參考過程軌跡如圖3所示。
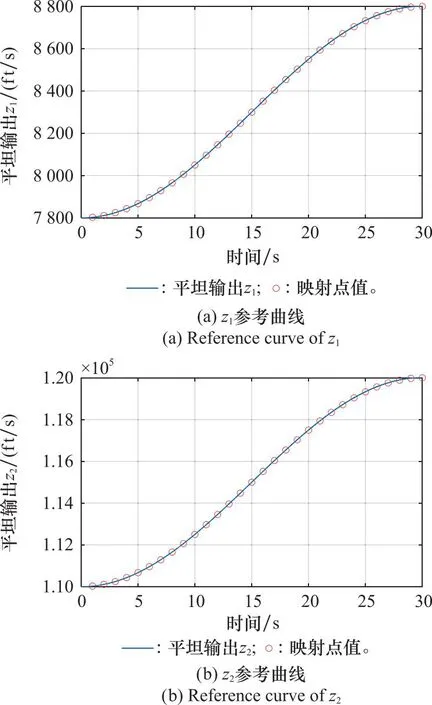
圖3 平坦輸出參考軌跡Fig.3 Reference trajectories of flat outputs
其中,紅色圓圈代表映射CGL點(diǎn)處平坦輸出的取值,其余位置為映射點(diǎn)經(jīng)過重心Lagrange插值獲得。

圖4 軌跡跟蹤仿真結(jié)果Fig.4 Simulation results of trajectory tracking
由圖4所示仿真結(jié)果可以看出,速度和高度跟蹤效果良好,經(jīng)過30 s的時(shí)間完成動(dòng)態(tài)過程,達(dá)到期望的終端速度和高度。誤差存在的原因主要為兩方面:一方面為期望平坦輸出的高階導(dǎo)數(shù)誤差不可避免,若期望軌跡為解析可微分形式,則代入控制器后可有效減小誤差。另一方面為系統(tǒng)參數(shù)不確定性和控制器自身性能影響。在Chebyshev 偽譜法優(yōu)化平坦輸出下,整個(gè)過程中控制輸入和過程狀態(tài)全程在約束范圍內(nèi),變化較為平緩,控制輸入較小。
為了驗(yàn)證所提出方法的魯棒性與優(yōu)勢(shì),對(duì)其所有氣動(dòng)和環(huán)境參數(shù)做±20%的隨機(jī)平均概率攝動(dòng)處理,以驗(yàn)證其在不確定條件下的控制性能。以文獻(xiàn)[29-30]中的全微分平坦跟蹤控制作為參考對(duì)比方法1,以文獻(xiàn)[16]中的串級(jí)ADRC設(shè)計(jì)方法作為參考對(duì)比方法2。對(duì)比仿真結(jié)果如圖5所示。
圖5 蒙特卡羅仿真結(jié)果Fig.5 Results of Monte-Carlo simulation
仿真結(jié)果表明,所提出基于微分平坦的ADRC跟蹤控制方法性能良好,且實(shí)現(xiàn)了模型具有不確定性時(shí)的軌跡跟蹤,高度通道跟蹤精度和控制平穩(wěn)度都具有一定的優(yōu)勢(shì),在參數(shù)攝動(dòng)條件下控制器具有較好的魯棒性。
5 結(jié) 論
本文研究了考慮約束條件的高超聲速飛行器的縱向軌跡跟蹤問題,提出一種結(jié)合微分平坦的ADRC跟蹤控制方法,實(shí)現(xiàn)了帶有狀態(tài)及控制輸入約束下高超聲速飛行器的穩(wěn)定軌跡跟蹤。該方法的優(yōu)勢(shì)主要在于兩方面:一是微分平坦在線性化模型的同時(shí)實(shí)現(xiàn)了過程狀態(tài)和控制輸入向平坦輸出的映射,將高階模型微分動(dòng)態(tài)的多約束問題轉(zhuǎn)化為了平坦輸出的軌跡優(yōu)化問題,降低了計(jì)算維數(shù)、提高了計(jì)算效率;另一方面是基于ADRC的姿態(tài)控制系統(tǒng)極大地增強(qiáng)了系統(tǒng)的魯棒性,其與微分平坦的結(jié)合應(yīng)用在階數(shù)較高的軌跡跟蹤問題中既無需使用高階或串級(jí)ESO而損失性能,又能減小方法的模型依賴問題,使得整個(gè)系統(tǒng)跟蹤控制性能更好,魯棒性更強(qiáng)。仿真結(jié)果顯示,基于微分平坦的優(yōu)化軌跡滿足了要求的過程約束,軌跡跟蹤效果良好,魯棒性較強(qiáng)。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19