基于自抗擾控制的共軸直升機姿態控制律設計
2024-03-08 09:32:10劉明皓周沛沅許敏捷王新華
海軍航空大學學報 2024年1期
關鍵詞:優化
劉明皓,周沛沅,許敏捷,王新華
(1.中船(北京)智能裝備科技有限公司,北京 102629;2.中國船舶集團有限公司第七一六研究所,江蘇 連云港 222061;3.南京航空航天大學自動化學院,江蘇 南京 210016)
0 引言
共軸直升機在空中飛行和海上著艦過程中,經常受到外部干擾的影響,難以對擾動建立準確的數學模型,且由于其上、下旋翼特殊構型,通道之間存在耦合。無人直升機著艦系統[1]設計的關鍵問題在于抗擾控制律設計。
受艦船附近大氣紊流的干擾,無人直升機機體穩定性差、易受干擾影響的特性會被放大,不利于著艦過程的穩定性,尤其在高海況情況下,外界干擾是影響著艦性能的關鍵因素[2]。因此,無人直升機控制律應當具備優良的抗擾性能與魯棒性,這樣才能應對海上復雜多變的著艦環境。
目前,工程上使用廣泛的直升機著艦控制方法仍是經典PID 控制[3-4]。然而,經典控制方法設計的控制器抗擾性差[5-6],難以滿足著艦過程中對抗擾性的關鍵要求[7]。針對現代控制方法[7-11]的研究仍然停留在理論研究階段。自抗擾控制具有能夠對受到非線性、時變擾動的不確定系統進行有效控制的特點,因此被廣泛應用于受擾動系統中,可利用自抗擾控制的優良抗擾特性,提高著艦過程穩定性[12]。本文選用自抗擾控制設計共軸直升機內環控制律[13],以提高共軸直升機[14]對外部擾動的抗擾性能;使用改進的粒子群算法,對共軸直升機自抗擾控制律參數進行優化;通過仿真分析說明自抗擾控制律[15-16]的良好性能。
1 共軸無人直升機基本自抗擾控制律設計
1.1 共軸無人直升機建模分析
對共軸無人直升機所受力與力矩進行分析,得到共軸無人直升機運動學模型。共軸無人直升機的線運動方程為:
式(1)中:m為飛行器質量;u、v、w分別為沿OX、OY、OZ軸線速度;p、q、r分別為繞OX、OY、OZ軸角速度。
角運動方程表示為:
式(2)中:Ix、Iy、Iz為直升機對OX、OY、OZ軸的轉動慣量;Ixz為直升機對OX和OZ軸的慣性積;∑L、∑M、∑N為繞OX、OY、OZ機體軸轉動的力矩之和,繞機體軸正方向轉動的力矩為正。
不考慮交叉慣性積可得:
式(3)中:θ、φ分別為俯仰角和滾轉角;( )·ur為上旋翼物理量;( )·dr為下旋翼物理量;( )·fus為機身物理量。
針對建立的共軸無人直升機模型,通過開環仿真對其進行自然特性分析。通過MATLAB 軟件求得系統17 個開環特征根,其中:4 個特征根虛部為0,實部處于-8.3 附近;4 個特征根位于原點位置;5 個特征根虛部為0,實部處于零點附近;2 個特征根虛部為0,實部為-0.15;2個特征根虛部為0,實部為-0.3;2個特征根對稱于虛軸,虛部接近于0,實部為0。整體分析:4個虛部為0,實部處于-8.3 附近的特征根表示橫側向揮舞運動,收斂良好;其余特征根均處在原點位置或者原點附近,狀態中立穩定。針對共軸雙旋翼直升機輸入量與狀態量,通過MATLAB軟件trim 工具進行配平。配平后的模型零輸入狀態開環特性各狀態量均處于穩定狀態。
1.2 自抗擾姿態控制律設計
共軸直升機動力學模型耦合性強,且在海上著艦風擾環境下共軸直升機姿態控制易受擾動影響,ADRC 控制能夠避免不同控制通道之間的相互耦合影響。通過估計得到系統總和擾動,通過反饋補償實現對于擾動的補償。故針對控制內、外環模型對姿態環滾轉、俯仰和偏航通道單獨設計ADRC 控制律,在計算控制輸出的同時進行反饋補償,以增強系統魯棒性與抗擾性。由于ADRC 控制律的分離式原理,故可以對每部分的控制律進行單獨設計。
俯仰通道ADRC控制律為例,其結構如圖1所示。

圖1 俯仰通道ADRC控制律結構圖Fig.1 Structure diagram of pitch channel ADRC control law
建立共軸直升機俯仰通道模型如下:
式(4)中:f( )· 為被控對象俯仰通道所受到的總擾動量,θ1=θ,θ2=θ?。
對 圖1 中 跟 蹤 微 分 器(Tracking Differentiator,TD)、擴張狀態觀測器(Extended State Observer,ESO)以及非線性狀態反饋(Nonlinear State Error Feedback,NLSEF)進行如下設計:
1) 跟蹤微分器(TD):
式(5)中,fhan函數為ADRC最速跟蹤函數。
通過將輸入俯仰角控制量θin與配平俯仰角θ0相加,得到期望的俯仰角θd輸入到跟蹤微分器以獲得期望俯仰角的跟蹤信號θd1和跟蹤信號的微分信號θd2。式(5)中,r是速度因子,h0是濾波因子,在仿真實驗中可以與積分步長h取值相同。
2) 擴張狀態觀測器(ESO):
式(6)為俯仰通道擴張狀態觀測器離散形式。其中,β1、β2、β3為狀態觀測器的增益系數;α01、α02為非線性因子;δ為濾波因子;b為放大倍數。通過狀態觀測器調整參數可以得到狀態量x1、x2的觀測量z1和z2,同時還可以得到擴張狀態觀測量z3,該觀測量表征俯仰通道所受到的總擾動。正是該擴張狀態量的實時觀測與補償保證了系統的穩定性。
3) 非線性狀態反饋(NLSEF):
式(7)中:k1、k2為非線性系數;α1、α2與擴張狀態觀測器中的系數α01、α02均為非線性因子;δ0與擴張狀態觀測器中的δ均為fal( ·) 函數中的濾波因子;Δδeu和Δδed分別為上、下旋翼的縱向周期變距,通過參考文獻可知參數取值范圍為0<α1<1<α2。非線性狀態反饋通過誤差eθ1和eθ2的非線性組合得到u0(T) ,再通過對于擴張觀測量z3(T) 的補償,消除系統擾動對于穩定性的影響,最終得到控制量u(T) 。由于共軸無人直升機的上、下旋翼特殊構型,下旋翼縱向周期變距Δδed與上旋翼縱向周期變距Δδeu方向相反,同時可以通過調整俯仰因子σθ來調整上、下旋翼縱向周期變距對于共軸直升機俯仰運動的控制占比。同理可以得到滾轉通道控制律結構和偏航通道控制律結構,ADRC 控制律各部分設計和俯仰通道一致。
2 基于改進粒子群算法的自抗擾控制律參數優化
同PID控制算法中的比例、積分、微分參數大小會對控制算法效果造成影響,ADRC 控制中的參數數值的選取也會對ADRC 控制算法的控制效果造成影響。為了解決參數準確整定的問題,在ADRC 參數整定方面已經有很多智能尋優算法的應用,能夠實現參數的自動優化。
粒子群優化算法[17-18]是智能尋優算法中的1 種。它通過種群粒子(初始值隨機的解)的群體迭代過程確定目標最優解。整個迭代過程是通過計算得到的“個體極值”和“全局極值”來確定粒子更新的方向。在迭代過程中,當找到這2個極值之后,就可以使用它們對個體的位置與速度進行更新。與其他的優化算法相比,粒子群優化算法具備不需要變異和交叉操作的優點,優化過程中需要設定額定參數和尋優計算量都較小,在大多數情況下可在更短的時間內收斂到所求最優解。
2.1 標準粒子群優化算法
式(8)(9)中:w為慣性權重,其數值大小表示了前一時刻速度在當前速度更新過程中所占的權重。慣性權重的調整能夠調整算法對于局部與全局的搜索能力。
標準粒子群算法一般使用式(10)所表示的線性遞減形式的慣性權重,其中:wstart、wend為初始值與終止值;tmax為所設置的迭代最大次數。a1、a2分別為自加速系數與全局加速系數,通過這2 個參數來調整迭代過程中從自身最優位置和種群最優位置進行學習的能力。r1、r2都是0~1 范圍內的隨機數。此時,還需要通過公式中迭代次數為t+2 的速度與位置計算更新t+1迭代次數時的“個體極值”與“全局極值”。
2.2 改進粒子群優化算法
傳統粒子群算法存在一定的缺陷,在迭代的過程中會趨向于“全局極值”方向,導致參數優化的過程中容易出現收斂于局部最優解和后期收斂緩慢的問題。為了解決該問題,對算法中慣性權重與加速系數形式進行改進。
對于慣性權重:當其增大時會增強對于全局空間的搜索能力;當其減小時反之,但此時對于局部空間的搜索能力會增加。所以理想慣性權重需要滿足系數從大到小的動態變化和系數在前后期減小緩慢這2個條件。通過引入sigmoid 函數對系數進行優化設計。sigmoid函數形式如下:
sigmoid函數值滿足單調變化,且在變化初期與變化末期的變化速度減緩,符合慣性權重迭代過程中的變化趨勢。借助sigmoid函數對慣性權重設計:
式(14)中:wstart和wend為慣性權重迭代的初始值和終止值;t為迭代次數。當系數b、c取值為3.1 和0.06 時,得到的慣性權重滿足理想慣性權重條件,有利于初期全局搜索與后期局部搜索。
在傳統的粒子群算法中,加速系數a1、a2是固定不變的常量,與理想搜索狀態下前期注重全局搜索能力、后期注重局部搜索能力的要求不相符,故對加速因子a1、a2進行如下設計:
通過在算法迭代過程中不斷變化的慣性權重w來進行前后期的區分,用正弦波表示形式平滑參數變化,將加速因子初始值與終止值設置為,得 到 迭 代 過 程 加速系數變化情況如圖2、3所示。
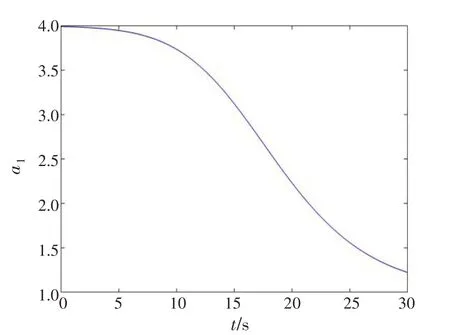
圖2 全局加速系數變化曲線圖Fig.2 Global acceleration coefficient variation curve
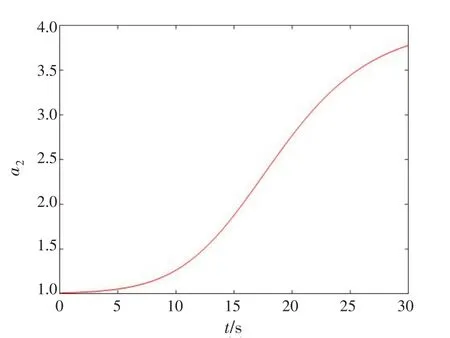
圖3 自加速系數變化曲線圖Fig.3 Curve plot of self acceleration coefficient change
2.3 自抗擾控制律參數優化
將共軸直升機控制對象的自抗擾控制律與改進粒子群算法相結合,借助粒子群算法快速尋優的特性對自抗擾控制律參數進行優化。改進粒子群算法自抗擾控制律參數優化結構如圖4所示。
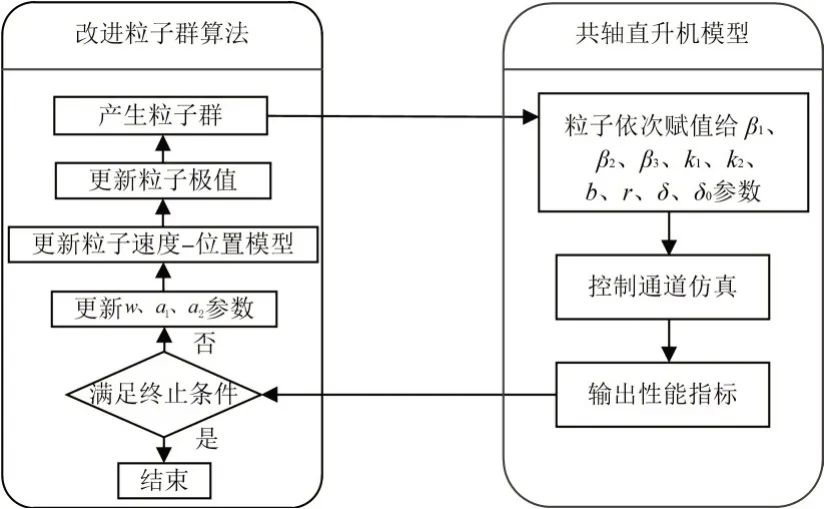
圖4 改進粒子群算法自抗擾控制律參數優化結構圖Fig.4 Structure diagram of active disturbance rejection control law parameter optimization based on improved particle swarm optimization
粒子群算法參數優化流程如下。
1) 初始化粒子群,對種群規模N,慣性權重w,加速因子a1和a2,迭代終止條件以及粒子初始位置、速度等進行初始化。迭代終止條件可以是對粒子群算法迭代次數的限制,也可以是對性能指標即適應度函數值的限制。
2) 將粒子群中的粒子表示的數據輪流賦值給ADRC 控制律中所需要整定的參數,使用當前參數進行共軸直升機ADRC控制仿真。
3) 通過仿真運行計算性能指標。
4) 當性能指標滿足終止條件規定,或者迭代次數滿足終止條件規定時,滿足結束條件,得到參數最優解。性能指標依據ITAE 準則設計,適應度函數如式(16)所示:
5) 當不滿足終止條件,通過式(14)(15)對慣性權重和加速因子進行更新。通過式(8)(9)更新粒子的位置與速度信息。
6) 通過式(11)(12)對粒子的“個體極值”與種群“全局極值”進行更新。
7) 更新后的粒子群轉至步驟(2)進行下一輪迭代。
最終優化得出各個通道的自抗擾控制律優化參數如表1 所示。表中:r表示微分跟蹤器中的速度因子;δ、b、β1、β2、β3分別表示擴張狀態觀測器中的增益系數、濾波因子和放大倍數;δ0、k1、k2分別表示非線性狀態反饋中的非線性系數和濾波因子。
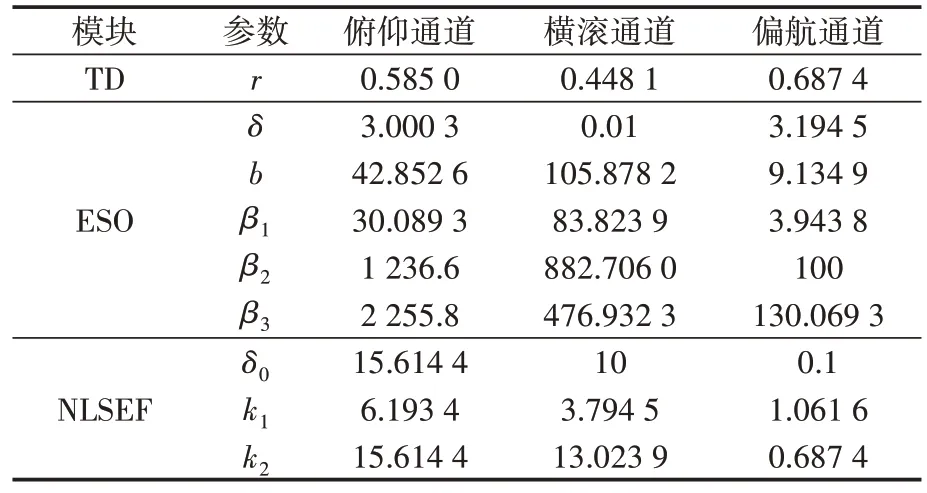
表1 自抗擾控制律優化參數Tab.1 Optimal parameters of active disturbance rejection control law
3 仿真分析
3.1 改進粒子群優化算法性能仿真分析
對共軸直升機模型俯仰通道ADRC 控制器分別使用傳統粒子群算法與改進粒子群算法進行參數整定。初始化設置種群規模N=50,粒子緯度C=30,慣性 權 重wmax=0.9、wmin=0.4,加 速 因 子,迭代終止條件為迭代30次,分別得到迭代曲線如圖5、6所示。從圖可以看出:傳統粒子群算法需要進行18次迭代才能達到算法最優解;而改進粒子群算法只需要進行13 次迭代即可達到算法最優解。且傳統算法的最優解的適應度值為0.004 3;而改進粒子群算法迭代最優解的適應度值為0.000 41。
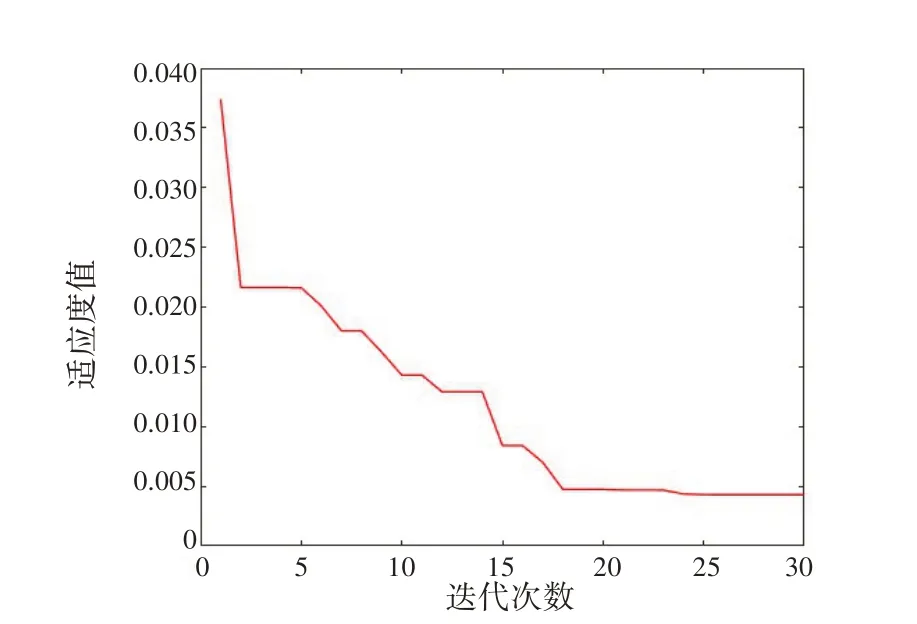
圖5 標準粒子群優化算法迭代曲線Fig.5 Iterative curve of standard particle swarm optimization algorithm
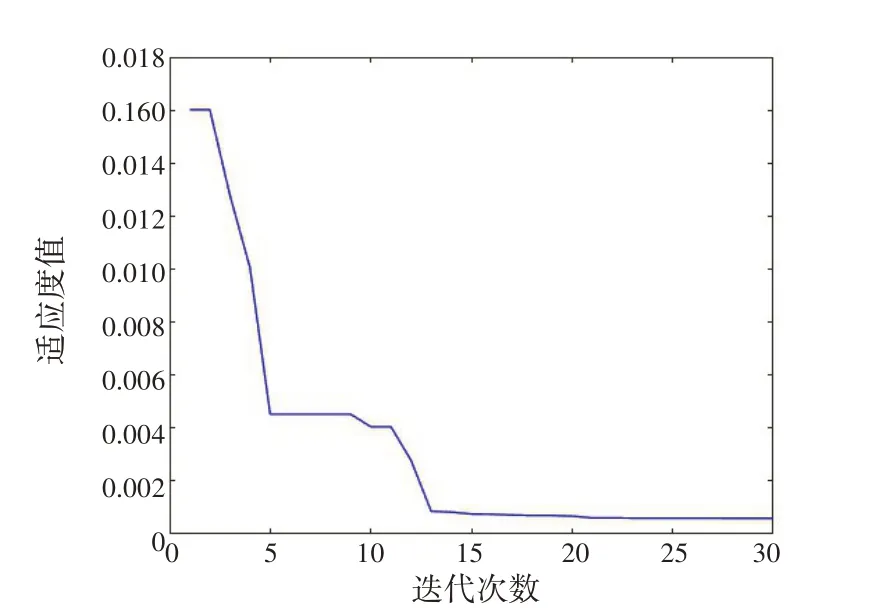
圖6 改進粒子群優化算法迭代曲線Fig.6 Iterative curve of improved particle swarm optimization algorithm
經過多次仿真實驗統計:傳統算法的平均最佳適應度值為4.5×10-3;改進粒子群算法的平均最佳適應度為2.7×10-4。
改進粒子群算法通過對慣性權重和速度因子參數的形式調整,引入sigmoid 函數實現變化趨勢單調,且在迭代前期和后期速度減緩的理想參數變化,不僅加強了迭代前期對于全局的搜索能力,使得適應度值收斂速度加快,同時還加強了后期局部空間搜索能力,避免迭代后期出現因為粒子速度過大導致跳過最優解的情況,使得迭代最優解適應度值更低。
3.2 自抗擾姿態控制律性能仿真分析
在共軸直升機姿態控制中常使用PID控制律設計姿態內環控制律。PID控制律主要通過偏差信號的反饋校正實現對輸入控制信號的響應跟蹤。以俯仰通道為例,將期望俯仰角與實際俯仰角的差值疊加配平俯仰角后,輸入到PI控制律。同時考慮到物理微分難以工程實現,將實際俯仰角速率乘以微分系數作為微分環節輸出,將上述輸出相加得到PID控制律輸出eq。考慮到共軸無人直升機構型的特殊性,俯仰通道的輸出量為上、下旋翼的縱向周期變距Δδeu和Δδed,Δδed在輸出前需要進行反向,俯仰通道PID控制律結構如圖7所示。

圖7 俯仰通道PID控制律結構圖Fig.7 PID control law structure diagram of pitch channel
俯仰通道的PID控制律為:
首先,在共軸無人直升機處于穩定懸停狀態且無大氣紊流等外部擾動的環境下,對PID 姿態控制律與改進ADRC 姿態控制律進行仿真對比。分別對俯仰、偏航、滾轉通道在3 s 時輸入20°階躍信號,得到姿態角響應如圖8 所示。從仿真結果可以看出,采用PID控制律進行控制時,俯仰角和偏航角響應存在大的超調,需要20 s 的時間來達到穩態,且存在1°s 左右的穩態誤差。對于滾轉角控制,PID 控制響應相較其他通道效果有所改善,但仍存在穩態誤差。采用ADRC 控制通過跟蹤微分器安排過渡過程,響應過程更加平滑,幾乎不存在穩態誤差,響應也更快速。在無外界干擾的理想環境下,ADRC控制較PID控制精度更高,響應速度更快。

圖8 無干擾情況下姿態角響應Fig.8 Attitude angle response without interference
由于共軸無人直升機著艦環境復雜多變,所采用的姿態控制律須具備良好的魯棒性。本文通過在共軸無人直升機縱向周期變距、橫向周期變距和總距通道施加氣流擾動情況下,分析采用PID 控制與ADRC控制姿態控制律是姿態角對階躍信號的響應,得到仿真結果如圖9 所示。可以看出:當引入氣流擾動后,PID 控制器的響應輸出曲線有著明顯的抖動,在氣流擾動環境下PID 控制器控制效果不佳,用于著艦內環姿態控制會影響安全著艦過程;而ADRC 控制器由于擴張觀測器對于系統總擾動的觀測能力與擾動補償設計對氣流擾動有很強的抗干擾能力,控制效果更佳,具備更強的魯棒性。

圖9 施加氣流擾動后姿態角響應Fig.9 Attitude angle response after airflow disturbance
4 結論
本文采用自抗擾控制器對共軸無人直升機姿態控制進行設計,針對自抗擾控制器整定參數過多問題,將改進粒子群算法用于參數優化環節,實現參數的自動優化。通過仿真驗證了改進粒子群算法相較于傳統粒子群算法尋優參數性能更佳;通過將整定參數后的自抗擾姿態控制器與PID姿態控制器進行仿真對比,結果表明自抗擾控制具備更好的動態性能,且對于以大氣紊流為代表的外界擾動具備更好的抗擾性與魯棒性。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45