基于數(shù)字孿生的加工生產(chǎn)線虛實交互技術(shù)研究*
2024-03-11 01:03:54周高偉劉夢園魯慶洋
機(jī)電工程 2024年2期
周高偉,沙 杰,劉夢園,魯慶洋
(河南工業(yè)大學(xué) 機(jī)電工程學(xué)院,河南 鄭州 450001)
0 引 言
隨著全球范圍內(nèi)科技的不斷創(chuàng)新與發(fā)展,我國提出了“中國制造2025”戰(zhàn)略計劃,其旨在推動傳統(tǒng)制造業(yè)向智能制造方向的轉(zhuǎn)型。在制造業(yè)轉(zhuǎn)型升級的背景下,加工生產(chǎn)線的智能化轉(zhuǎn)型升級已迫在眉睫。智能制造利用集成大數(shù)據(jù)、互聯(lián)網(wǎng)等信息化技術(shù),通過人、機(jī)、物、法、環(huán)的連接[1],完成生產(chǎn)加工過程[2]中自主分析、決策的功能。
數(shù)字孿生[3]技術(shù)的出現(xiàn)為加工生產(chǎn)線的智能化發(fā)展提供了新的思路。數(shù)字孿生技術(shù)作為融合物理世界和信息世界的有效手段,通過構(gòu)建虛實之間的雙向連接,讓虛擬模型模擬物理實體的行為,使得加工生產(chǎn)線更加智能化。
徐非等人[4]采用映射字典生成了微電子生產(chǎn)線的三維虛擬模型,完成了物理生產(chǎn)線數(shù)據(jù)到虛擬生產(chǎn)線的實時映射,完成了虛實數(shù)據(jù)統(tǒng)一;但該數(shù)字孿生體由三維模型和大量的生產(chǎn)數(shù)據(jù)構(gòu)成,不具有普適性。石浩[5]采用數(shù)字孿生技術(shù)對智能車間進(jìn)行了虛擬模擬,縮短了電機(jī)車間的調(diào)試周期和生產(chǎn)成本;但是其沒有對車間數(shù)據(jù)的采集給出詳細(xì)的方法。張曉萍等人[6]設(shè)計了基于數(shù)字孿生的灌裝生產(chǎn)線動態(tài)實時可視化監(jiān)控系統(tǒng),完成了多源異構(gòu)數(shù)據(jù)的采集傳輸及存儲;但是其并沒有提到虛擬生產(chǎn)線對現(xiàn)實生產(chǎn)線的反饋。林承志等人[7]利用Unity開發(fā)自動化生產(chǎn)線數(shù)字孿生平臺完成了物理世界與虛擬世界間的數(shù)據(jù)交互;但是其并沒有對生產(chǎn)線進(jìn)行生產(chǎn)管控。XIN Y T等人[8]利用數(shù)字孿生技術(shù)構(gòu)建了起重機(jī)的人機(jī)交互界面,完成了可視化監(jiān)控和反饋控制;但在數(shù)據(jù)交互過程中存在較大的延遲和誤差。
綜上所述,目前學(xué)者們在生產(chǎn)線虛實交互與監(jiān)控方面取得了許多顯著的成就,但是仍然存在一些不足:
1)傳統(tǒng)企業(yè)數(shù)字化程度低,信息數(shù)據(jù)流通慢,缺少生產(chǎn)線信息模型與智能管理,生產(chǎn)數(shù)據(jù)不透明;
2)對復(fù)雜的生產(chǎn)線而言,不同的設(shè)備采用不同的通訊協(xié)議,給數(shù)據(jù)采集和應(yīng)用造成了困難,缺乏一致有效的數(shù)據(jù)集成與傳輸方案。
針對上述不足,筆者采用數(shù)字孿生技術(shù)、建模技術(shù)、OPC技術(shù)和虛實交互技術(shù)等方式,以電機(jī)外殼加工生產(chǎn)線為平臺,構(gòu)建虛實交互的基本框架;將加工線上不同設(shè)備進(jìn)行連接并互通數(shù)據(jù),進(jìn)行物理實體與虛擬實體的實時映射,對加工過程進(jìn)行實時監(jiān)控,并對生產(chǎn)計劃進(jìn)行管控[9]等。
1 虛實交互總體設(shè)計
為解決加工過程中數(shù)據(jù)采集困難和可視化程度低的問題,首先,筆者對電機(jī)外殼加工生產(chǎn)線的加工流程進(jìn)行分析;然后,基于數(shù)字孿生技術(shù)對電機(jī)外殼加工線虛實交互技術(shù)的框架進(jìn)行總體設(shè)計。
1.1 電機(jī)外殼加工流程分析
筆者借助現(xiàn)有的電機(jī)裝配工作站,設(shè)計了一條電機(jī)外殼加工生產(chǎn)線。其加工流程如下:首先,由旋轉(zhuǎn)供料機(jī)構(gòu)將電機(jī)外殼毛坯件旋轉(zhuǎn)到指定點位;其次,由機(jī)械臂抓取旋轉(zhuǎn)供料機(jī)構(gòu)上的電機(jī)外殼毛坯件,并將其放到加工中心;然后,由加工中心對毛坯進(jìn)行一系列加工;加工完成后,機(jī)械臂抓取電機(jī)外殼,將其放置在倉庫中。
實驗設(shè)備如圖1所示。

圖1 實驗設(shè)備
加工流程如圖2所示。
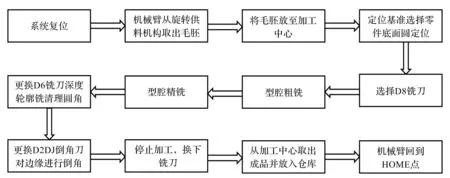
圖2 加工流程
1.2 虛實交互技術(shù)框架
筆者根據(jù)加工生產(chǎn)線加工流程,結(jié)合陶飛提出的數(shù)字孿生五維模型理論[10]建立了基于數(shù)字孿生的加工生產(chǎn)線虛實交互技術(shù)框架。虛實交互技術(shù)框架主要由四部分組成:物理生產(chǎn)線、數(shù)字孿生體、孿生數(shù)據(jù)層和服務(wù)模塊。虛實交互技術(shù)主要是指從物理生產(chǎn)線中采集實時及歷史數(shù)據(jù)[11],將其傳輸?shù)綌?shù)字孿生體與服務(wù)模塊中,完成二者之間虛實映射。
基于數(shù)字孿生的加工生產(chǎn)線虛實交互技術(shù)框架如圖3所示。
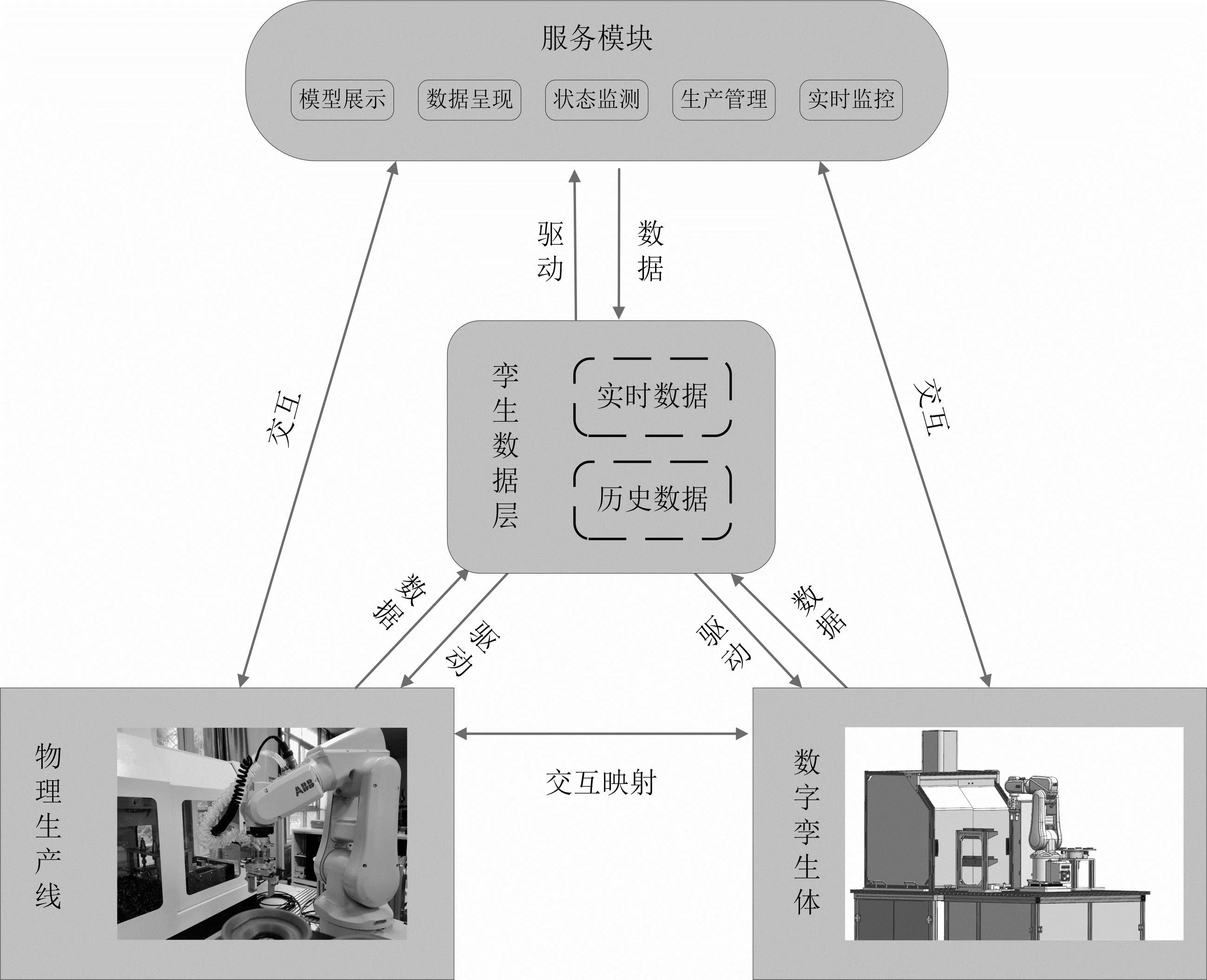
圖3 基于數(shù)字孿生的加工生產(chǎn)線虛實交互技術(shù)框架
基于數(shù)字孿生的電機(jī)外殼加工線虛實交互平臺框架較為復(fù)雜,涵蓋了數(shù)據(jù)傳輸?shù)倪m配性、模型構(gòu)建的真實性、系統(tǒng)的實時性、虛實同步的準(zhǔn)確性及遠(yuǎn)程實時監(jiān)控等設(shè)計需求。因此,為了順利完成加工生產(chǎn)線的虛實交互,需要在設(shè)計初期制定完整的框架和解決方案。電機(jī)外殼加工生產(chǎn)線虛實交互技術(shù)中的核心主要由以下三部分構(gòu)成:加工生產(chǎn)線數(shù)字孿生體模型的構(gòu)建、多源異構(gòu)數(shù)據(jù)采集與處理及實時數(shù)據(jù)間的映射。
2 加工生產(chǎn)線數(shù)字孿生體模型構(gòu)建
2.1 關(guān)鍵要素模型構(gòu)建
從“人、機(jī)、料、法、環(huán)、測”的視角出發(fā),電機(jī)外殼加工生產(chǎn)線加工過程中的關(guān)鍵實體要素包括:人員、設(shè)備、毛坯或產(chǎn)品、環(huán)境[12]。
因此,加工生產(chǎn)線加工過程數(shù)字孿生體統(tǒng)一描述表示如下:
DTL=Dp∪Dd∪Dm∪De
(1)
式中:DTL為生產(chǎn)線加工過程數(shù)字孿生體模型;Dp為加工生產(chǎn)線人員數(shù)字孿生體模型;Dd為加工生產(chǎn)線設(shè)備孿生體模型;Dm為加工生產(chǎn)線毛坯或產(chǎn)品數(shù)字孿生體模型;De為環(huán)境數(shù)字孿生體模型。
在關(guān)鍵要素模型構(gòu)建中,Dd的構(gòu)建尤為重要。為完成物理生產(chǎn)線到數(shù)字孿生體模型的虛實交互映射,需要參考物理生產(chǎn)線中的設(shè)備,從幾何、物理、行為、通訊接口等多個維度對加工生產(chǎn)線中的各個設(shè)備進(jìn)行建模,并將各個維度的模型融合為一個完整的、能夠完整映射物理加工生產(chǎn)線的數(shù)字孿生體模型。
設(shè)備的數(shù)字孿生體模型描述表示如下:
Dd={Dgeo,Dphy,Dbeh,Dcoi}
(2)
式中:Dgeo為幾何模型;Dphy為物理模型;Dbeh為行為模型;Dcoi為通訊接口模型。
加工生產(chǎn)線設(shè)備孿生體模型的構(gòu)建包括幾何模型的構(gòu)建、物理與行為模型的構(gòu)建、通訊接口模型的構(gòu)建。具體的流程為:首先,在三維建模軟件中對對幾何模型中的關(guān)鍵要素(如形狀、尺寸等)進(jìn)行建模;然后,按照對應(yīng)的裝配關(guān)系將各個部件進(jìn)行裝配;其次,將模型導(dǎo)入到機(jī)電一體化概念設(shè)計(mechatronics concept designer,MCD)中進(jìn)行物理、行為模型的建模操作;最后,建立設(shè)備模型的通訊接口,以滿足實體設(shè)備與數(shù)字孿生體之間的虛實聯(lián)動[13]。
以機(jī)械臂的數(shù)字孿生體構(gòu)建為例,其構(gòu)建方式如圖4所示。
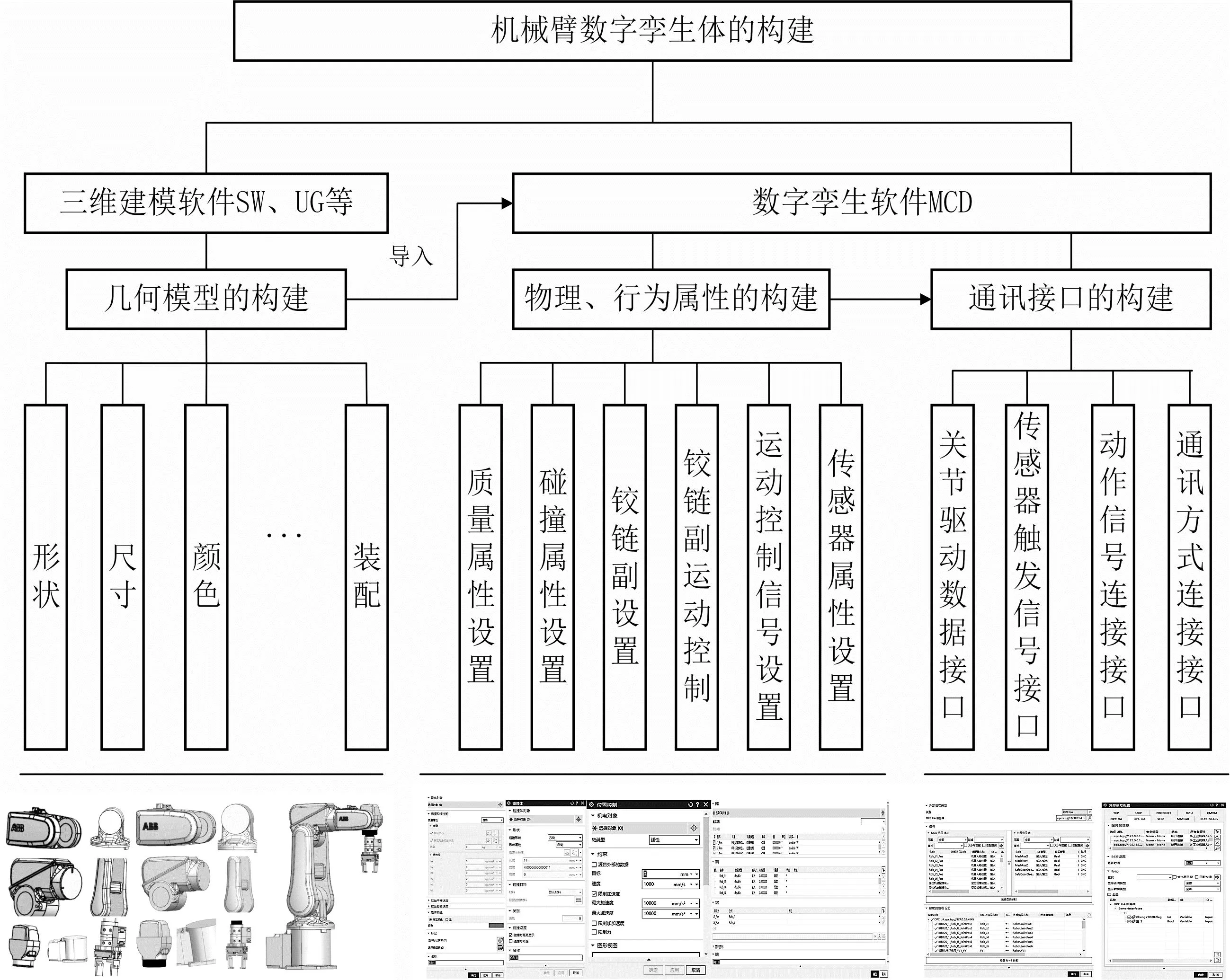
圖4 設(shè)備的數(shù)字孿生體模型構(gòu)建
在進(jìn)行加工生產(chǎn)線虛實同步過程中,會出現(xiàn)數(shù)字孿生體未實時、同步地跟隨物理加工線工作的問題。為解決上述問題,筆者需要對設(shè)備數(shù)字孿生體中幾何模型、物理行為屬性、通訊接口的構(gòu)建制定相應(yīng)的方案,并以機(jī)械臂的數(shù)字孿生體構(gòu)建為例進(jìn)行詳細(xì)介紹。
2.2 幾何模型的構(gòu)建
幾何模型的構(gòu)建是虛實同步能否順利完成的重要基礎(chǔ)。幾何模型的構(gòu)建包括設(shè)備的形狀、尺寸、顏色、裝配關(guān)系、相對位置關(guān)系等參數(shù),可以在三維建模軟件SW、UG中進(jìn)行構(gòu)建。
為解決虛實同步過程中數(shù)字孿生體模型運動同步性的問題,數(shù)字孿生體的幾何模型尺寸與物理實體的幾何尺寸及相對位置需保持一致,相對位置誤差應(yīng)保持在最大、最小偏差內(nèi)。為此,筆者需要對設(shè)備幾何模型形狀、尺寸、相對位置及裝配關(guān)系進(jìn)行描述。
以機(jī)械臂幾何建模為例,幾何模型構(gòu)建的描述表示如下:
SDT={Sb,Ss…};
Msi={Mx,My,Mz};
PDT={Px,Py,Pz},
Pxi≤Px≤Pxa,Pyi≤Py≤Pya,Pzi≤Pz≤Pza;
ADT={At,Ap,Av,Arv,Aro}
(3)
式中:SDT為機(jī)械臂數(shù)字孿生體模型的形狀參數(shù);Msi為機(jī)械臂的數(shù)字孿生體模型的尺寸關(guān)系;Mx,My,Mz為機(jī)械臂模型x,y,z軸的幾何尺寸;PDT為數(shù)字孿生體設(shè)備幾何模型的相對位置關(guān)系;Px,Py,Pz為加工線機(jī)械臂模型設(shè)備的x,y,z軸的位置坐標(biāo);Pxi,Pxa為位置坐標(biāo)允許的最小、最大偏差值;ADT為數(shù)字孿生體設(shè)備的裝配關(guān)系;At為相切;Ap為平行;Av為垂直;Arv為值域范圍;Aro為旋轉(zhuǎn)范圍。
2.3 物理、行為屬性的構(gòu)建
物理、行為屬性的構(gòu)建是數(shù)字孿生體進(jìn)行運動的關(guān)鍵,同時也關(guān)系到通信接口的構(gòu)建。物理、行為屬性的構(gòu)建包括質(zhì)量、碰撞、運動、運動控制等屬性,為解決虛實同步過程中數(shù)字孿生體與物理設(shè)備實時運行不一致的問題,筆者需要對數(shù)字孿生體設(shè)備中關(guān)節(jié)的運行方式、速度及加速度等進(jìn)行設(shè)置。
以機(jī)械臂數(shù)字孿生體中物理、行為屬性的構(gòu)建為例進(jìn)行描述,表示如下:
PHDT={PHmass,PHmom,PHcen,PHCS,PHCP…};
HPDT={HPPRI,HPAXI,HPANC,HPSTA,HPROTA},
HPROTASUP≤HPROTA≤HPROTALOW;
PODT={POMOD,POROTDI,POMOVS,POMOTA},
POMOTAMAX≤POMOTA≤POMOTAMIN;
APPO={AxiP1,AxiP2,AxiP3,AxiP4,AxiP5,AxiP6}
(4)
式中:PHDT為機(jī)械臂數(shù)字孿生體物理屬性;PHmass為機(jī)械臂數(shù)字孿生體各個關(guān)節(jié)的質(zhì)量;PHmom為各個關(guān)節(jié)的慣性矩;PHcen為各個關(guān)節(jié)的質(zhì)心;PHCS為碰撞形狀;PHCP為碰撞位置;HPDT為機(jī)械臂數(shù)字孿生體行為屬性建模中的各軸的運動屬性;HPPRI為軸旋轉(zhuǎn)所參考的基本體;HPAXI為軸矢量;HPANC為錨點;HPSTA為起始角;HPROTA為機(jī)械臂各軸旋轉(zhuǎn)角度;HPROTASUP為機(jī)械臂各軸旋轉(zhuǎn)角度上限;HPROTALOW為機(jī)械臂各軸旋轉(zhuǎn)角度下限;PODT為機(jī)械臂數(shù)字孿生體運動控制屬性;POMOD為運動類型;POROTDI為運動路徑;POMOVS為機(jī)械臂運行速度;POMOTA為運動加速度;POMOTAMAX,POMOTAMIN為機(jī)械臂運行的最大與最小加速度;APPO為機(jī)械臂數(shù)字孿生體驅(qū)動信號;AxiP為機(jī)械臂的六個軸的數(shù)字孿生體驅(qū)動信號。
2.4 通訊接口的構(gòu)建
通訊接口的構(gòu)建是數(shù)字孿生體運行過程中驅(qū)動各個動作精確運行的重要橋梁,也是物理加工線與數(shù)字孿生體同步運行的重要一步。
以機(jī)械臂數(shù)字孿生體通訊接口的建立為例進(jìn)行描述,表示如下:
SAPO={AXIS1,AXIS2,AXIS3,AXIS4,AXIS5,AXIS6};
AXIS1=AxiP1,AXIS2=AxiP2,AXIS3=AxiP3,
AXIS4=AxiP4,AXIS5=AxiP5,AXIS6=AxiP6
(5)
式中:SAPO為MCD與機(jī)械臂的數(shù)字孿生體及外部進(jìn)行通信的接口;AXIS為控制機(jī)械臂數(shù)字孿生體各軸的信號接口;AXIS1=AxiP1為各軸的信號接口與數(shù)字孿生體驅(qū)動信號的對應(yīng)關(guān)系。
3 多源異構(gòu)數(shù)據(jù)采集與處理
電機(jī)外殼的加工生產(chǎn)線由西門子1200可編程控制器(programmable logic controller,PLC)進(jìn)行總體控制。筆者采用以太網(wǎng)、I/O總線等方式對現(xiàn)場的機(jī)床、機(jī)器人、旋轉(zhuǎn)供料、立體倉庫、傳感器進(jìn)行連接,形成系統(tǒng)的通訊網(wǎng)絡(luò),再通過數(shù)據(jù)的采集、分析和傳輸,將數(shù)字孿生體和物理生產(chǎn)線所有數(shù)據(jù)(參數(shù))進(jìn)行一一映射,并進(jìn)行數(shù)據(jù)的實時傳輸。
加工生產(chǎn)線的設(shè)備來自不同的廠家,擁有不同的控制系統(tǒng),且不同的控制系統(tǒng)擁有不同的通訊協(xié)議。為了解決多源異構(gòu)數(shù)據(jù)的采集與處理問題[14],需要尋找行之有效的數(shù)據(jù)采集方法,建立不同設(shè)備之間的連接,進(jìn)而完成物理生產(chǎn)線與數(shù)字孿生體之間的虛實同步。而OPC通訊協(xié)議為不同設(shè)備和軟件規(guī)范了一套標(biāo)準(zhǔn)的通訊接口[15],其能夠解決多源異構(gòu)數(shù)據(jù)的采集與傳輸問題。
筆者利用OPC通訊,結(jié)合OPC統(tǒng)一架構(gòu)(unified architecture,UA)與OPC數(shù)據(jù)訪問(data access,DA)兩種技術(shù)完成了設(shè)備的連接與數(shù)據(jù)的采集[16],采用KEPServerEX軟件作為OPC DA服務(wù)器;結(jié)合使用C#開發(fā)的OPC UA機(jī)器人數(shù)據(jù)采集軟件以及機(jī)床數(shù)據(jù)采集軟件,建立了加工生產(chǎn)線數(shù)據(jù)采集與傳輸?shù)姆桨浮?/p>
首先,筆者將裝有KEPServerEX軟件的計算機(jī)采用以太網(wǎng)的方式與交換機(jī)、PLC、機(jī)器人控制柜和機(jī)床相連,形成主要通信方式;然后,采用倍福I/O模塊總線將加工生產(chǎn)線上的傳感器連接到機(jī)器人控制柜D652 I/O板,與ABB機(jī)器人進(jìn)行通信;其次,倉庫采用以太網(wǎng)方式與PLC連接;最后,在建立好的通信通道的基礎(chǔ)上,以尋址的方式獲取各個設(shè)備的IP地址,再采用通訊協(xié)議對加工生產(chǎn)線運行過程中的數(shù)據(jù)進(jìn)行實時采集。
數(shù)據(jù)采集和傳輸?shù)目蚣苋鐖D5所示。
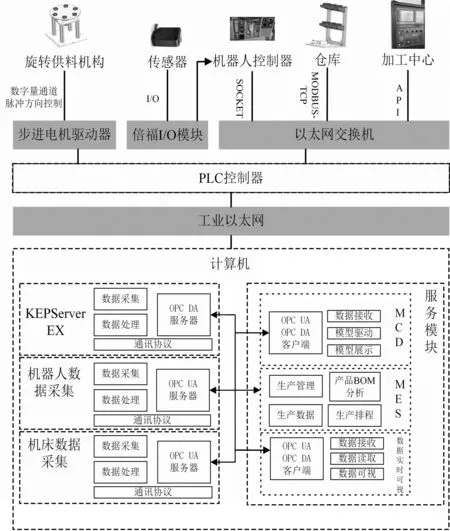
圖5 數(shù)據(jù)采集與傳輸框架
筆者采用數(shù)據(jù)采集軟件及KEPServerEX軟件對生產(chǎn)線的數(shù)據(jù)進(jìn)行轉(zhuǎn)換、分類、匯總,采用OPC通信協(xié)議將數(shù)據(jù)傳輸至數(shù)字孿生體及服務(wù)系統(tǒng)中[17]。
采用上述方式,可以高效、實時地采集與傳輸加工生產(chǎn)線的各類數(shù)據(jù),為后續(xù)虛實同步奠定基礎(chǔ)。
4 實時數(shù)據(jù)間的映射
完成物理生產(chǎn)線與數(shù)字孿生體的實時運行,是加工生產(chǎn)線可視化的重要一步。筆者在完成了數(shù)字孿生體構(gòu)建與多源異構(gòu)數(shù)據(jù)采集與處理后,需要將采集完成的數(shù)據(jù)與數(shù)字孿生體的數(shù)據(jù)進(jìn)行一一對應(yīng)。以機(jī)械臂的虛實交互為例,將實體機(jī)械臂的信號與MCD中的信號建立連接,完成信號的高保真映射[18]。
數(shù)據(jù)間的映射表示如下:
EXSPO={ROBJ1,ROBJ2,ROBJ3,ROBJ4,ROBJ5,ROBJ6};
ROBJ1=AXIS1,ROBJ2=AXIS2,ROBJ3=AXIS3,
ROBJ4=AXIS4,ROBJ5=AXIS5,ROBJ6=AXIS6
(6)
式中:EXSPO為物理實體的機(jī)械臂的信號集合;ROBJ為機(jī)械臂各軸的實時數(shù)據(jù);AXIS1=AxiP1為實體機(jī)械臂各軸信號數(shù)據(jù)與MCD各軸信號接口的對應(yīng)關(guān)系。
筆者將MCD軟件中OPC客戶端與外部OPC服務(wù)器進(jìn)行連接,形成數(shù)據(jù)傳輸通道。通道傳輸?shù)臄?shù)據(jù)通常由數(shù)據(jù)名稱、I/O類型、數(shù)據(jù)類型、路徑等信息構(gòu)成,這就需要將物理生產(chǎn)線與數(shù)字孿生體間具有相同動作信息的節(jié)點一一映射起來。而實體設(shè)備傳來的實數(shù)、單精度浮點型和雙精度浮點型數(shù)據(jù)在MCD中統(tǒng)一為用實數(shù)類型進(jìn)行展現(xiàn),便于物理生產(chǎn)線到數(shù)字孿生體之間的虛實交互[19-21]。
數(shù)據(jù)變量映射如圖6所示。
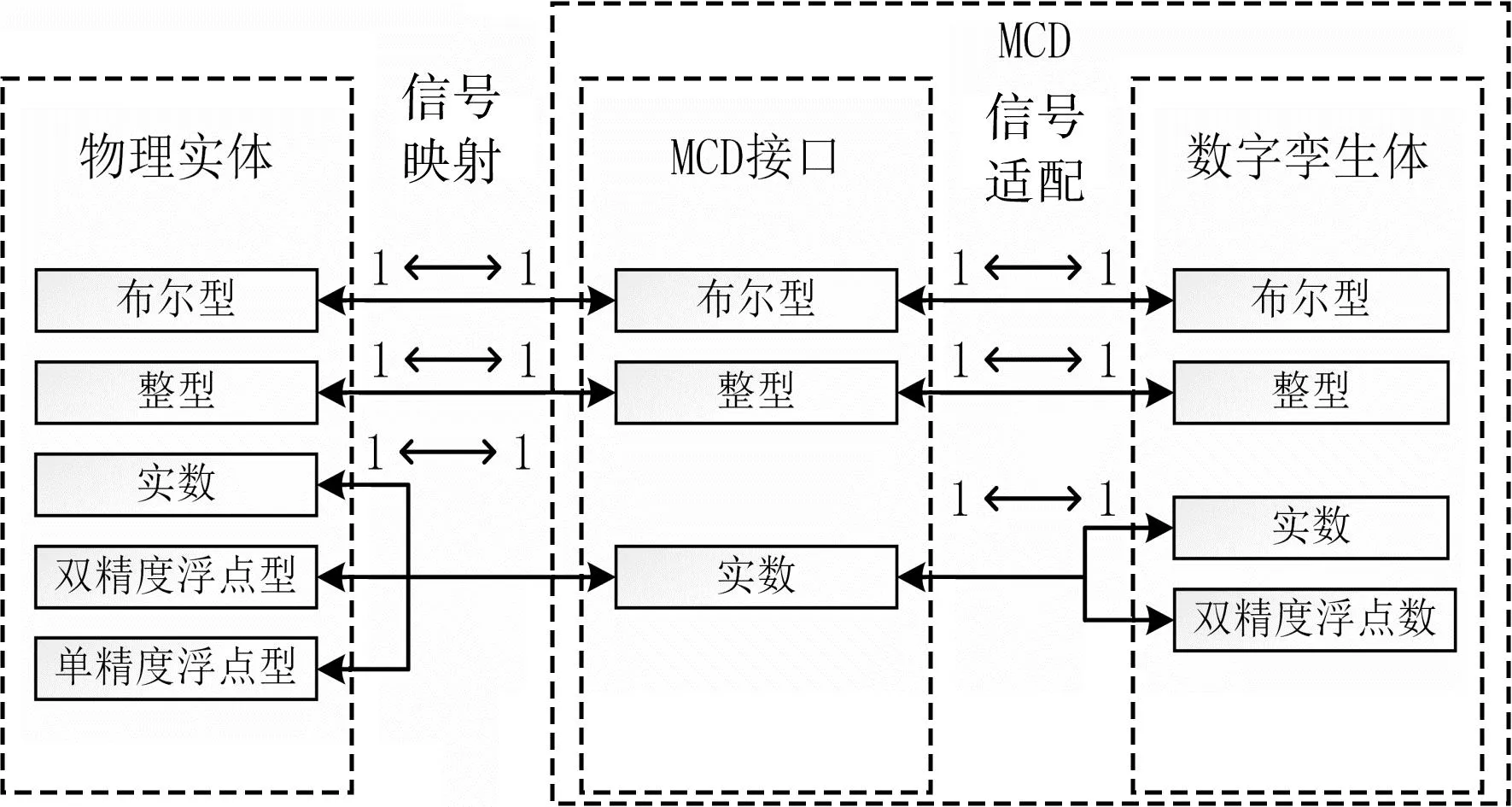
圖6 數(shù)據(jù)變量映射圖
筆者將加工生產(chǎn)線與數(shù)字孿生體所有數(shù)據(jù)一一映射完成之后,啟動加工生產(chǎn)線、數(shù)據(jù)采集及KEPServerEX軟件,由OPC服務(wù)器對加工生產(chǎn)線的各個節(jié)點中不斷變化的數(shù)據(jù)進(jìn)行監(jiān)聽和訂閱,由OPC客戶端對不同節(jié)點數(shù)據(jù)進(jìn)行提取,將物理實體的數(shù)據(jù)向數(shù)字孿生體傳輸。
其中,數(shù)字孿生體對物理實體的信號反饋是通過PLC與MCD的OPC UA客戶端與服務(wù)器來完成,數(shù)據(jù)映射的方式與圖6映射的方式一致,但數(shù)字孿生體可將傳感器信號反饋給PLC,進(jìn)而完成加工生產(chǎn)線的虛實同步運行。
5 實例驗證
筆者以某電機(jī)外殼加工生產(chǎn)線為驗證對象,針對現(xiàn)有設(shè)備數(shù)據(jù)采集困難、可視化程度低及缺少智能管理等問題,采用數(shù)字孿生技術(shù)對加工生產(chǎn)線設(shè)計虛實交互方案,利用三項關(guān)鍵技術(shù)為加工生產(chǎn)線提供了解決方案;此外,對加工生產(chǎn)線產(chǎn)生的加工過程信息、設(shè)備信息和管理信息等進(jìn)行了可視化展示。
5.1 加工生產(chǎn)線數(shù)字孿生體構(gòu)建
加工生產(chǎn)線的數(shù)字孿生體構(gòu)建,首先,筆者采用UG三維建模軟件繪制幾何模型,并對加工生產(chǎn)線中的設(shè)備進(jìn)行合理的布局;再由MCD機(jī)電概念設(shè)計對幾何模型進(jìn)行行為屬性的構(gòu)建;最后建立模型的通訊接口,為虛實映射做好準(zhǔn)備。
虛擬加工生產(chǎn)線如圖7所示。
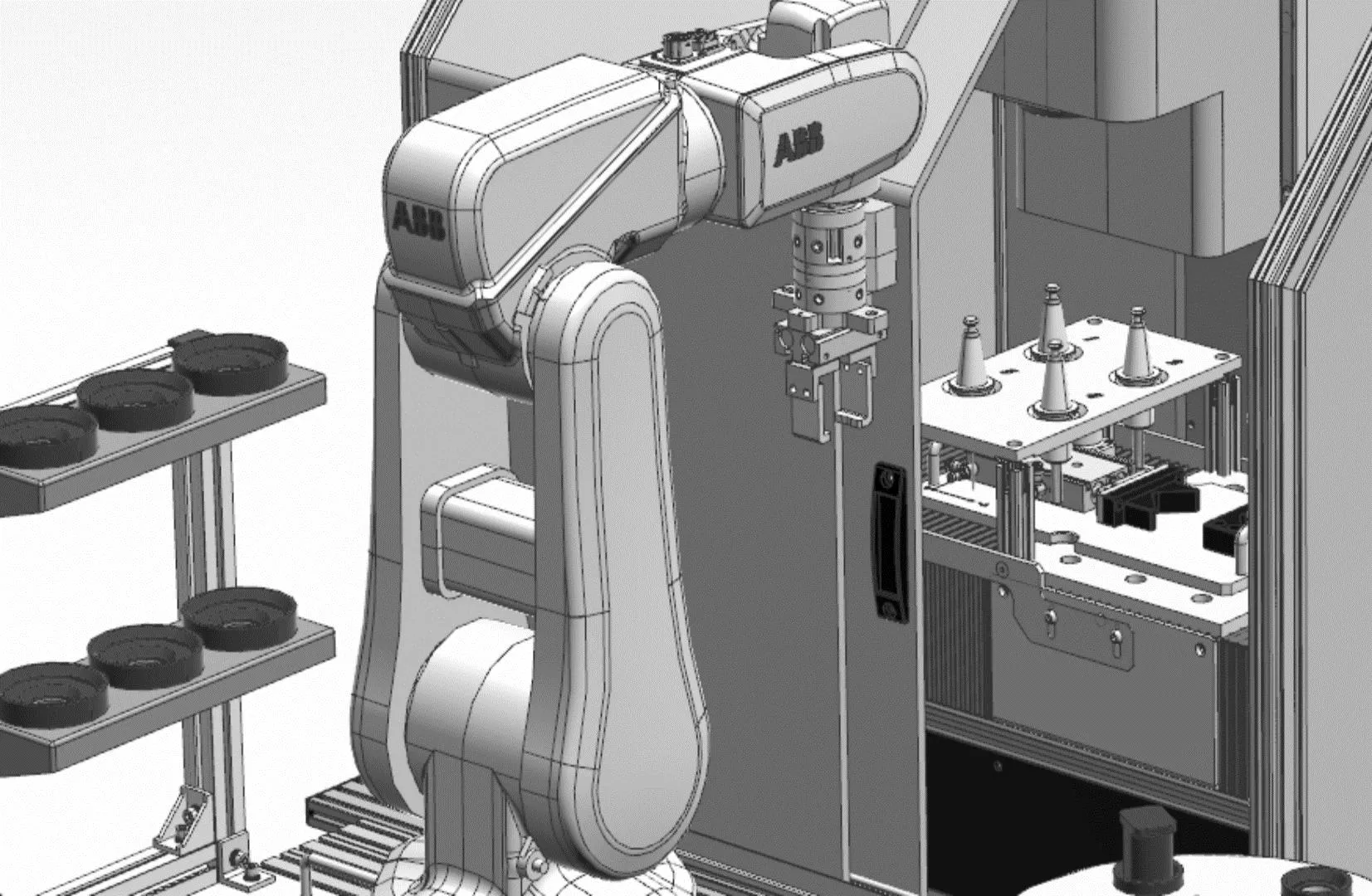
圖7 虛擬加工生產(chǎn)線布局圖
5.2 加工生產(chǎn)線數(shù)據(jù)采集與傳輸
電機(jī)外殼加工生產(chǎn)線由西門子1200 PLC總控,首先,需要在博途軟件中定義變量,編寫PLC程序,完成PLC環(huán)境搭建;然后,將博途中的組態(tài)和程序下載到PLC中。
加工生產(chǎn)線部分?jǐn)?shù)據(jù)參數(shù)如圖8所示。

圖8 加工中心數(shù)據(jù)參數(shù)
某電機(jī)外殼加工生產(chǎn)線采用以太網(wǎng)、I/O總線的方式對現(xiàn)場的加工中心、機(jī)器人、旋轉(zhuǎn)供料、立體倉庫、傳感器進(jìn)行連接,形成系統(tǒng)的通訊網(wǎng)絡(luò),再通過采集、分析和傳輸,將數(shù)字孿生體和實體設(shè)備中所有的數(shù)據(jù)類型進(jìn)行一一映射。
信號映射如圖9所示。
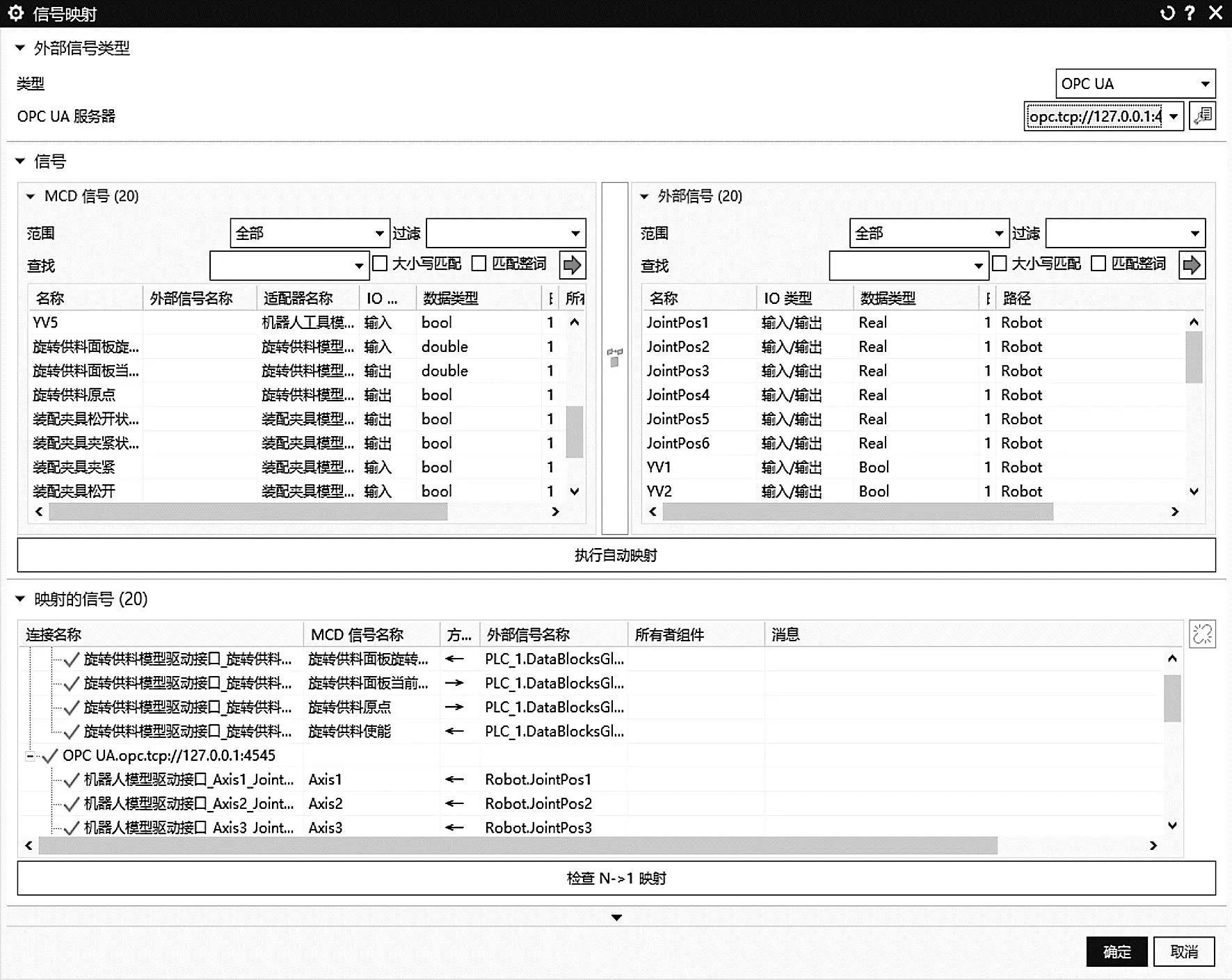
圖9 虛實加工生產(chǎn)線信號映射
5.3 虛實交互驗證
在物理生產(chǎn)線與數(shù)字孿生體完成映射并啟動后,實時數(shù)據(jù)將經(jīng)過通信網(wǎng)絡(luò)在數(shù)字孿生體、物理生產(chǎn)線和服務(wù)模塊中傳輸,完成數(shù)字孿生體與物理生產(chǎn)線同步工作。
加工生產(chǎn)線虛實交互工作效果如圖10所示。
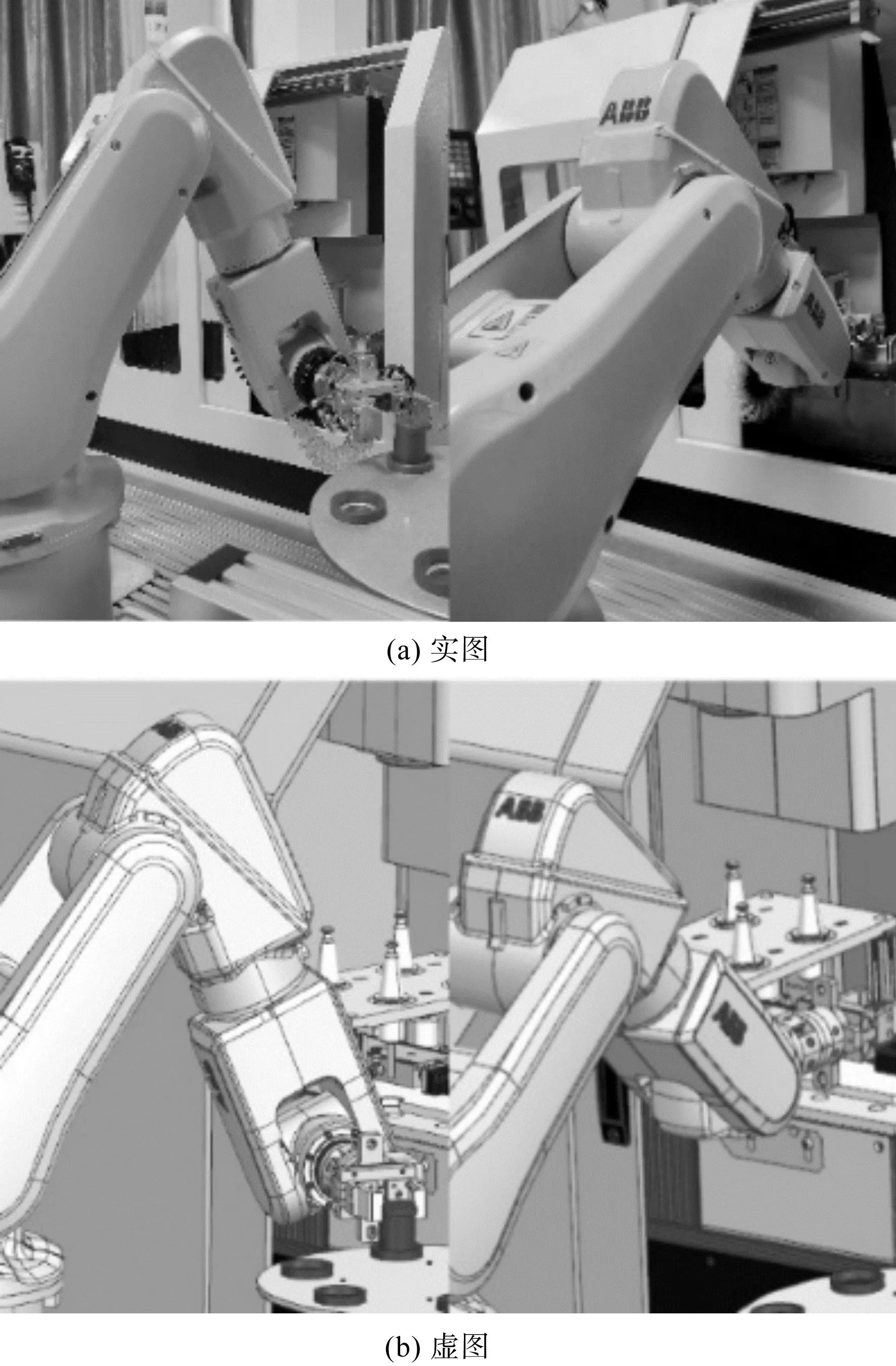
圖10 虛實交互效果圖
筆者以機(jī)械臂五軸的虛實交互實驗為例,驗證生產(chǎn)線虛實交互的性能。該實驗采用示教器控制實體機(jī)械臂運行一定的角度,理論上,機(jī)械臂數(shù)字孿生體會跟隨實體機(jī)器人運行同樣的角度。
實驗結(jié)果表明,二者數(shù)據(jù)存在較小的偏差,驗證了虛實交互性能的可靠性。
虛實交互實驗數(shù)據(jù)如表1所示。

表1 虛實交互實驗數(shù)據(jù)
為了增強(qiáng)某電機(jī)外殼加工生產(chǎn)線的智能管理能力,筆者采用制造執(zhí)行系統(tǒng)(manufacturing execution system,MES)控制某電機(jī)外殼加工生產(chǎn)線的運行,對待加工訂單進(jìn)行管理與排程,并且完成了加工過程信息的實時可視化展示。某電機(jī)外殼加工生產(chǎn)線的服務(wù)模塊可視化面板由虛實同步界面、MES管理界面、機(jī)床與機(jī)器人數(shù)據(jù)監(jiān)控面板共同構(gòu)成。
數(shù)據(jù)動態(tài)實時顯示界面如圖11所示。

圖11 生產(chǎn)管理及數(shù)據(jù)動態(tài)實時顯示圖
6 結(jié)束語
針對傳統(tǒng)加工生產(chǎn)線運行過程中設(shè)備數(shù)據(jù)采集困難和可視化程度低的問題,筆者研究了基于數(shù)字孿生的加工生產(chǎn)線虛實交互技術(shù),對加工生產(chǎn)線進(jìn)行了數(shù)字孿生體建模,完成了加工生產(chǎn)線中多源異構(gòu)數(shù)據(jù)的采集與處理,以及實時數(shù)據(jù)間的映射,并在電機(jī)外殼加工生產(chǎn)線上進(jìn)行了驗證。
研究結(jié)論如下:
1)實驗結(jié)果表明,機(jī)械臂虛實交互的可靠性高達(dá)99.95%,保證了加工生產(chǎn)線虛實交互的精確性;
2)解決了電機(jī)外殼加工生產(chǎn)線監(jiān)控中數(shù)據(jù)獲取困難和實時生產(chǎn)運行過程可視化程度低的問題;
3)筆者提出了數(shù)字孿生體模型構(gòu)建方法和數(shù)據(jù)采集框架,對虛擬生產(chǎn)線的搭建和實體生產(chǎn)線多源異構(gòu)數(shù)據(jù)獲取提供了技術(shù)解決方案。
目前,筆者已經(jīng)完成了從物理加工線到加工線數(shù)字孿生體的生產(chǎn)過程的實時映射,但仍存在不足之處。在后續(xù)的工作中,筆者將在機(jī)械臂上加裝相機(jī)及激光距離傳感器來監(jiān)測工件狀態(tài),并研究虛實交互性能優(yōu)化、特殊情況的處理以及機(jī)械臂路徑規(guī)劃等方面的問題。
猜你喜歡
井岡教育(2022年2期)2022-10-14 03:11:44
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:00
電子制作(2018年11期)2018-08-04 03:26:08
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
中學(xué)生數(shù)理化·中考版(2017年12期)2017-04-18 12:55:05
科技知識動漫(2016年8期)2016-07-29 20:40:09
工業(yè)設(shè)計(2016年12期)2016-04-16 02:52:00
兒童故事畫報·發(fā)現(xiàn)號趣味百科(2015年12期)2016-01-25 00:41:49