傾轉(zhuǎn)旋翼機(jī)懸停狀態(tài)氣動干擾分析
2024-03-11 03:05:02李尚斌江露生林永峰
工程力學(xué) 2024年3期
李尚斌,江露生,林永峰
(中國直升機(jī)設(shè)計研究所直升機(jī)旋翼動力學(xué)重點(diǎn)實(shí)驗室,景德鎮(zhèn) 333000)
傾轉(zhuǎn)旋翼機(jī)具備垂直起降和懸停能力,飛行速度遠(yuǎn)高于常規(guī)直升機(jī),具有良好的任務(wù)靈活性和廣泛的用途。
懸停作為傾轉(zhuǎn)旋翼機(jī)一種重要飛行狀態(tài),其旋翼/機(jī)身干擾對氣動性能有重要影響。國外,針對V-22 等機(jī)型開展了系統(tǒng)研究,包括孤立旋翼氣動特性、槳葉表面壓力及載荷研究[1-2]、旋翼/機(jī)翼氣動干擾特性研究[3-5]、全機(jī)懸停/過渡/前飛等典型狀態(tài)氣動特性研究[6-9]以及全機(jī)氣彈綜合特性研究[10-11]等。國內(nèi),旋翼類飛機(jī)的研究主要集中在螺旋槳飛機(jī)[12-13]、直升機(jī)[14]和旋翼無人機(jī)[15-16],對于傾轉(zhuǎn)旋翼機(jī),采用動量源法、自由尾跡法或CFD 方法對孤立旋翼氣動特性及旋翼/機(jī)身干擾開展了一定的數(shù)值研究[17-20];針對孤立旋翼性能、噪聲特性進(jìn)行了試驗研究[21-22]。國內(nèi)研究主要集中在數(shù)值模擬方面,試驗研究相對偏少,懸停狀態(tài)的研究大多是針對機(jī)翼不偏轉(zhuǎn)或襟翼偏轉(zhuǎn)狀態(tài)。鑒于此,該文開展了懸停狀態(tài)氣動干擾風(fēng)洞試驗和數(shù)值模擬研究。試驗中,測量了懸停狀態(tài)下的旋翼升力和扭矩以及半模機(jī)翼的氣動力。采用運(yùn)動嵌套網(wǎng)格方法,通過求解N-S 方程對機(jī)翼傾角0°和90°兩種狀態(tài)進(jìn)行數(shù)值模擬,結(jié)果表明:不考慮機(jī)身氣動力時,孤立旋翼、機(jī)翼攻角0°和機(jī)翼攻角90°三種狀態(tài)下旋翼氣動特性差異不明顯;考慮機(jī)身氣動力時,機(jī)翼傾角0°時,機(jī)身產(chǎn)生可觀的向下氣動力,單片槳葉和機(jī)身出現(xiàn)強(qiáng)烈非定常氣動特性。
1 試驗設(shè)備
對主要試驗設(shè)備簡介,包括風(fēng)洞、模型、測量設(shè)備、數(shù)據(jù)采集和支撐系統(tǒng)。
試驗在中國直升機(jī)設(shè)計研究所旋翼動力學(xué)重點(diǎn)實(shí)驗室進(jìn)行,試驗風(fēng)洞為8 m×6 m 開口低速直流式風(fēng)洞。該風(fēng)洞風(fēng)速范圍為5 m/s~50 m/s,局部氣流偏角Δα≤0.5°、Δβ≤0.5°,湍流度ε≤0.5%,適合直徑4 m 以下的旋翼懸停和前飛試驗。
模型主要包括旋翼模型和機(jī)身模型。旋翼模型為萬向鉸型式,俯視逆時針,槳轂半徑0.22 m,槳葉半徑2.2 m,槳葉片數(shù)為3。機(jī)身模型為半模模型,參考了V22 外形,按1∶5.2636 縮比得到,出于減重考慮,去除了機(jī)腹并對機(jī)頭進(jìn)行了修改,主要由對稱板、主機(jī)身、平垂尾和機(jī)翼組成,長2.6549 m、寬1.3280 m、高0.9276 m。
數(shù)據(jù)測量設(shè)備包括旋翼六分量天平、扭矩天平以及機(jī)翼六分量天平,六分量天平均為力傳感器組裝成的合式天平,載荷由應(yīng)變式力傳感器及壓電晶體傳感器組成的測力器來測量,旋翼扭矩由扭矩傳感器測量。
數(shù)據(jù)采集為基于LX 總線的分布式模塊化EX1629系統(tǒng),單臺為48 通道,能對天平信號進(jìn)行實(shí)時選代解算得到六個分量。
包括旋翼和機(jī)身兩套支撐系統(tǒng)。旋翼支撐系統(tǒng)為α 機(jī)構(gòu),能實(shí)現(xiàn)俯仰角和偏航角的控制,由1 臺180 KW 電機(jī)連接,能驅(qū)動旋翼旋轉(zhuǎn)和旋翼軸傾轉(zhuǎn),電機(jī)轉(zhuǎn)速由變頻器控制,用以控制旋翼旋轉(zhuǎn)速度和傾轉(zhuǎn)速度,旋翼軸傾轉(zhuǎn)的角度控制由專用控制系統(tǒng)控制,可以實(shí)現(xiàn)任意角度的傾轉(zhuǎn)定位;機(jī)身支撐系統(tǒng)為隨動機(jī)構(gòu),和旋翼支撐系統(tǒng)各自獨(dú)立,能實(shí)現(xiàn)水平和垂直兩個方向上的運(yùn)動,以確保旋翼傾轉(zhuǎn)時旋翼/機(jī)身相對位置不變。圖1 為機(jī)翼攻角0°,懸停狀態(tài)試驗裝置圖。

圖1 試驗裝置圖Fig.1 Testing equipment
2 數(shù)值模擬
2.1 計算網(wǎng)格
計算網(wǎng)格采用結(jié)構(gòu)運(yùn)動嵌套網(wǎng)格,包括槳葉網(wǎng)格、機(jī)身網(wǎng)格和背景網(wǎng)格。槳葉網(wǎng)格為C 型網(wǎng)格,采用基于Poisson 方程的橢圓方程生成,周向、法向和徑向的網(wǎng)格數(shù)量為153×49×105,第一層網(wǎng)格距物面的距離為1×10-5倍弦長;機(jī)身網(wǎng)格數(shù)量為5.18×106;背景網(wǎng)格為笛卡爾網(wǎng)格,在旋翼/機(jī)身處進(jìn)行了加密,整個背景網(wǎng)格數(shù)量為1.33×106。
2.2 計算方法
直角坐標(biāo)系下,以三維可壓非定常N-S 方程組的守恒積分形式作為主控方程:
式中:
ρ 為 密度; (u,v,w) 速 度分量;e為單位質(zhì)量氣體的總能量; ?V為某一固定區(qū)域V的邊界;n為邊界的外法向量。為封閉N-S 方程,引入狀態(tài)方程:
以上各式其他符號詳細(xì)描述見文獻(xiàn)[23]。
湍流模型采用一方程SA 模型,該模型是依據(jù)經(jīng)驗、量綱分析和對分子黏性的選擇性依賴得到渦黏性系數(shù)的輸運(yùn)方程,既不需要分成內(nèi)外層模式、壁面模式和尾流模式,又不需要推導(dǎo)渦黏性系數(shù)的精確的輸運(yùn)方程,而是采用近似的輸運(yùn)方程,相對于兩方程湍流模型的計算量小,并具有較好的中等分離流動模擬能力,精度和效率較高,在工程實(shí)踐中得到了廣泛的運(yùn)用。
離散格式為Jameson 二階中心差分格式,為了避免了數(shù)值振蕩,加入了由二階、四階混合導(dǎo)數(shù)組成人工黏性項。
時間推進(jìn)為LU-SGS 格式,為提高非定常計算的效率,還耦合使用了雙時間方法,物理時間步過大容易帶來數(shù)值誤差,為了保證一定精度和分辨率以及計算效率考慮,物理時間步長取旋翼旋轉(zhuǎn)0.25°方位角所需時間。
物面采用無滑移邊界條件,即流體與物面的相對速度為零;遠(yuǎn)離機(jī)翼和旋翼的遠(yuǎn)場背景網(wǎng)格采用Riemann 不變量的遠(yuǎn)場邊界條件。
2.3 算法驗證
為了確保試驗數(shù)據(jù)的準(zhǔn)確性,進(jìn)行了標(biāo)定和重復(fù)性試驗。旋翼扭矩天平標(biāo)定公式、旋翼和機(jī)翼六分量天平標(biāo)定公式如下:
式(3)中:Q/(N·m)為扭矩天平測得的扭矩;ΔU為扭矩應(yīng)變片測得的電壓差值;式(4)中左邊為三個方向的力以及力矩,右邊為各項系數(shù),具體見表1;式(5)中左邊表示與初讀數(shù)的差值,右邊表示各應(yīng)變片測得的電壓。三個天平應(yīng)變片所測電壓以10 μV 表示1 個單位。

表1 天平標(biāo)定系數(shù)表Table 1 Balance calibration coefficient
表1 為天平標(biāo)定系數(shù)表,包括旋翼天平和機(jī)翼天平,計算迭代不少于7 次。扭矩天平標(biāo)定正確度為0.22%,精密度為0.07%;旋翼天平和機(jī)翼天平力標(biāo)定正確度為0.2%,精密度為0.05%,力矩標(biāo)定正確度為0.3%,精密度為0.05%。表2 為槳葉總距16°、機(jī)翼攻角0°、槳尖馬赫數(shù)0.437 狀態(tài)的重復(fù)性試驗結(jié)果,從表2 中可知各測量值重復(fù)性相對誤差均在0.5%以下。

表2 重復(fù)性試驗Table 2 Repeatability test results
采用試驗?zāi)P鸵罁?jù)試驗狀態(tài)對算法進(jìn)行驗證,包括孤立旋翼懸停狀態(tài)和旋翼/機(jī)身懸停狀態(tài)。
圖2 為懸停狀態(tài)試驗?zāi)P团ぞ叵禂?shù)隨拉力系數(shù)變化圖,機(jī)翼攻角0°,槳尖馬赫數(shù)為0.437。圖2中“半模模型旋翼+試驗”表示半模試驗狀態(tài),拉力為旋翼拉力減去機(jī)翼升力(定義機(jī)翼升力方向向下為正,和升力方向定義相反);“半模模型旋翼+計算”表示半模計算狀態(tài),拉力為旋翼拉力減去機(jī)翼升力。從圖2 中可以看出,對于旋翼氣動力,計算結(jié)果和試驗結(jié)果總體保持一致。
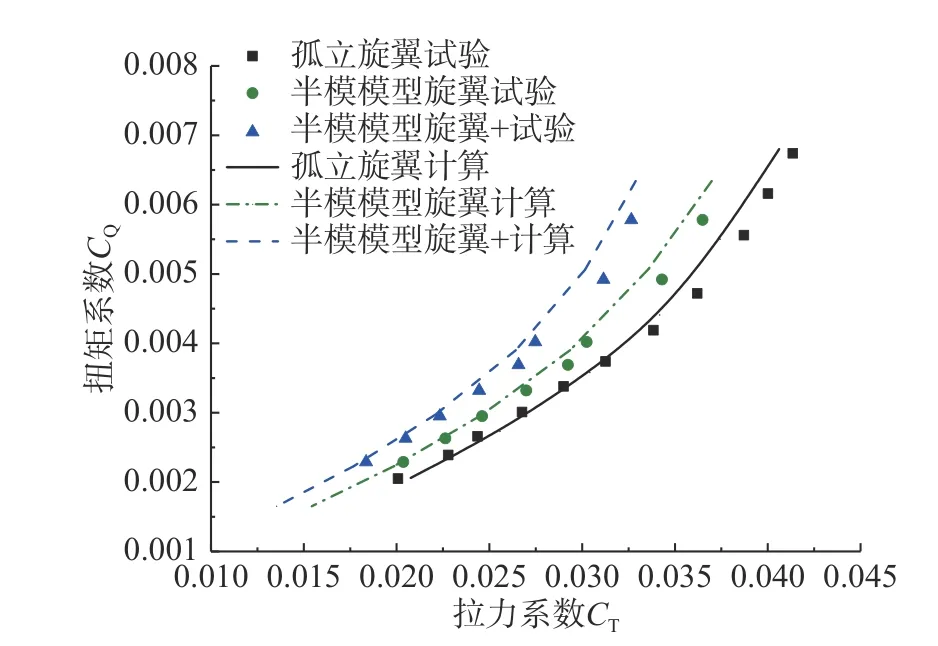
圖2 試驗?zāi)P团ぞ叵禂?shù)隨拉力系數(shù)變化圖Fig.2 CQ changing with CT of test model
圖3 為試驗?zāi)P蜋C(jī)翼升力系數(shù)隨旋翼拉力系數(shù)變化圖,機(jī)翼升力系數(shù)計算時,參考速度為旋翼槳尖速度,參考面積為旋翼槳盤面積。從圖3可以看出,對于機(jī)翼氣動力,計算結(jié)果和試驗結(jié)果總體保持一致。

圖3 試驗?zāi)P蜋C(jī)翼升力系數(shù)隨拉力系數(shù)變化圖Fig.3 CL of wing changing with CT of test model
從圖2 和圖3 可以看出,對于旋翼和機(jī)翼氣動力,計算結(jié)果和試驗結(jié)果總體保持一致,存在的差異主要原因有兩個:1)槳轂系統(tǒng)、動力系統(tǒng)和天平系統(tǒng)實(shí)際外形復(fù)雜,計算對各系統(tǒng)進(jìn)行了簡化處理;2)試驗?zāi)P蜋C(jī)身和機(jī)翼是分離設(shè)計,之間有機(jī)械間隙,存在一定的氣流繞流。經(jīng)上述分析,判定計算方法可信。
3 計算結(jié)果分析
為了能反映真機(jī)狀態(tài)氣動特性,以 V22 為參考,采用半模對稱邊界條件,對全尺寸模型真機(jī)運(yùn)行狀態(tài)進(jìn)行模擬。旋翼直徑11.58 m,翼展13.96 m,弦長2.56 m,機(jī)翼無上反和前掠,安裝角為0°,槳尖馬赫數(shù)0.708。
結(jié)果分析中涉及拉力系數(shù)CT、升力系數(shù)CL、扭矩系數(shù)CQ、壓力系數(shù)CP和懸停效率FM的計算,具體公式如下:
式中:T/N 為拉力;L/N 為升力(定義方向向下為正);Q/(N·m)為旋翼扭矩;Ω/(rad/s)為旋翼轉(zhuǎn)速;ρ/(kg/m3)為空氣密度;P/Pa 為當(dāng)?shù)貕毫Γ籔∞/Pa 為無窮遠(yuǎn)壓力。
3.1 氣動力分析
圖4 為扭矩系數(shù)隨拉力系數(shù)變化圖,圖5 為懸停效率隨拉力系數(shù)變化圖,圖6 為機(jī)身升力系數(shù)隨旋翼拉力系數(shù)變化圖。圖4~圖6 中旋翼槳尖馬赫數(shù)均為0.708,數(shù)據(jù)為旋翼旋轉(zhuǎn)一圈的平均值。圖4 和圖5 中“機(jī)翼攻角0°+”表示機(jī)翼攻角0°狀態(tài),拉力為旋翼拉力減去機(jī)身升力;“機(jī)翼攻角90°+”表示機(jī)翼攻角90°狀態(tài),拉力為旋翼拉力減去機(jī)身升力。從圖4 和圖5 可以看出,不考慮機(jī)身升力時,機(jī)身對旋翼總體性能影響不明顯;考慮機(jī)身升力時,在機(jī)翼攻角0°時,全機(jī)懸停效率大幅降低;從圖6 看出,當(dāng)機(jī)翼攻角0°時,機(jī)身升力隨旋翼拉力增大而增大,當(dāng)機(jī)翼攻角90°時,機(jī)身升力小。

圖4 扭矩系數(shù)隨拉力系數(shù)變化圖Fig.4 CQ changing with CT
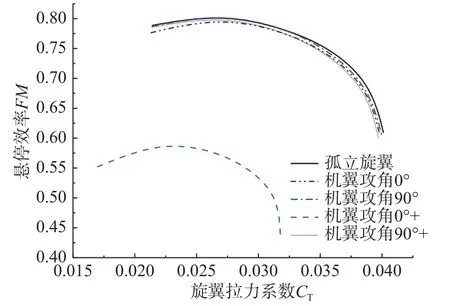
圖5 懸停效率隨拉力系數(shù)變化圖Fig.5 FM changing with CT

圖6 機(jī)身升力系數(shù)隨拉力系數(shù)變化圖Fig.6 CL of fuselage changing with CT
表3 為旋翼拉力系數(shù)與機(jī)身升力系數(shù)對比,表中φ7表示以0.7r/R處弦長為參考的槳葉總距。從表3 中可以看出,機(jī)翼攻角0°時,機(jī)身向下力與旋翼拉力平均比值為18.20%,導(dǎo)致全機(jī)懸停效率大幅降低;機(jī)翼攻角90°時,機(jī)身向下力與旋翼拉力平均比值為0.4%。這對機(jī)翼懸停狀態(tài)姿態(tài)設(shè)計、槳葉氣動設(shè)計以及指標(biāo)提出能提供一定參考。
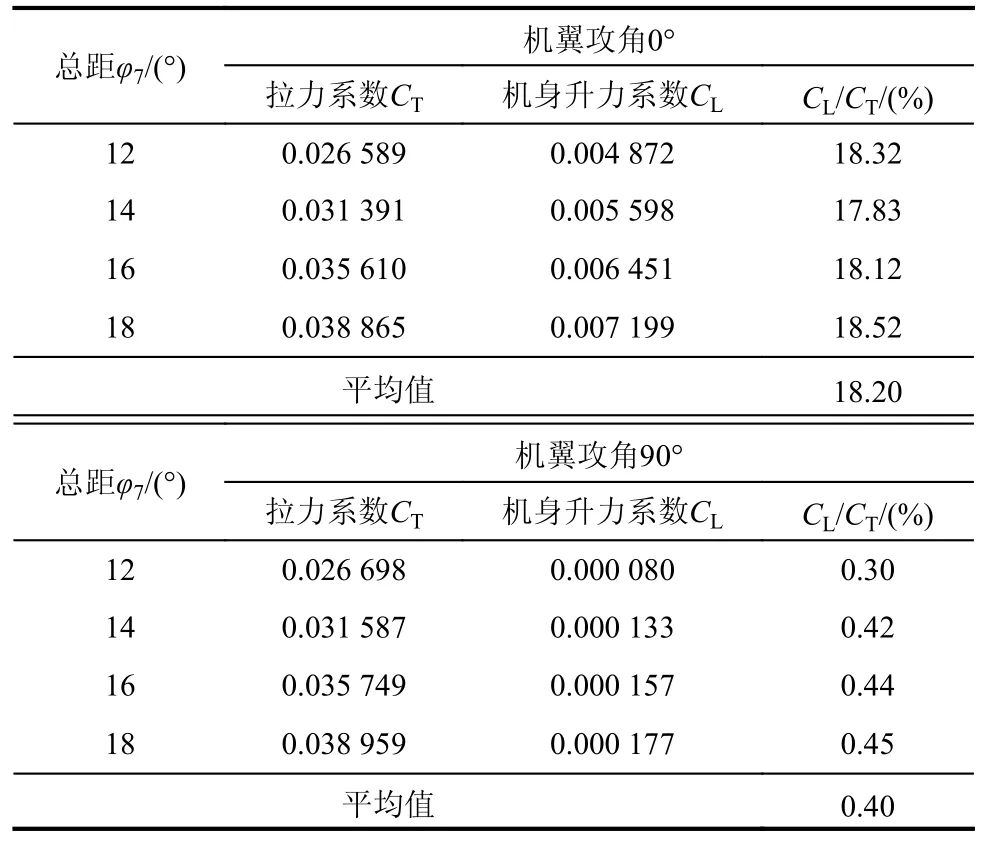
表3 拉力系數(shù)與機(jī)身升力系數(shù)對比Table 3 Comparison between CT and CL of fuselage
選取槳葉總距12°狀態(tài)分析氣動力非定常特性。圖7~圖10 分別為單片槳葉拉力系數(shù)、旋翼拉力系數(shù)、旋翼扭矩系數(shù)和機(jī)身升力系數(shù)隨方位角變化圖,定義槳葉處于機(jī)翼正上方時為0°方位角,方向同旋翼轉(zhuǎn)向一致,具體見圖7。從圖7 可以看出,對于單片槳葉非定常特性明顯;從圖8和圖9 可以看出,對于旋翼拉力系數(shù)和旋翼扭矩系數(shù),機(jī)翼攻角0°時的非定常特性強(qiáng)于機(jī)翼攻角90°時狀態(tài);從圖10 可以看出,機(jī)翼攻角0°時的向下氣動力明顯大于機(jī)翼攻角90°時狀態(tài),均有明顯非定常性。

圖7 單片槳葉拉力系數(shù)隨方位角變化圖Fig.7 CTB of single blade changing with azimuth
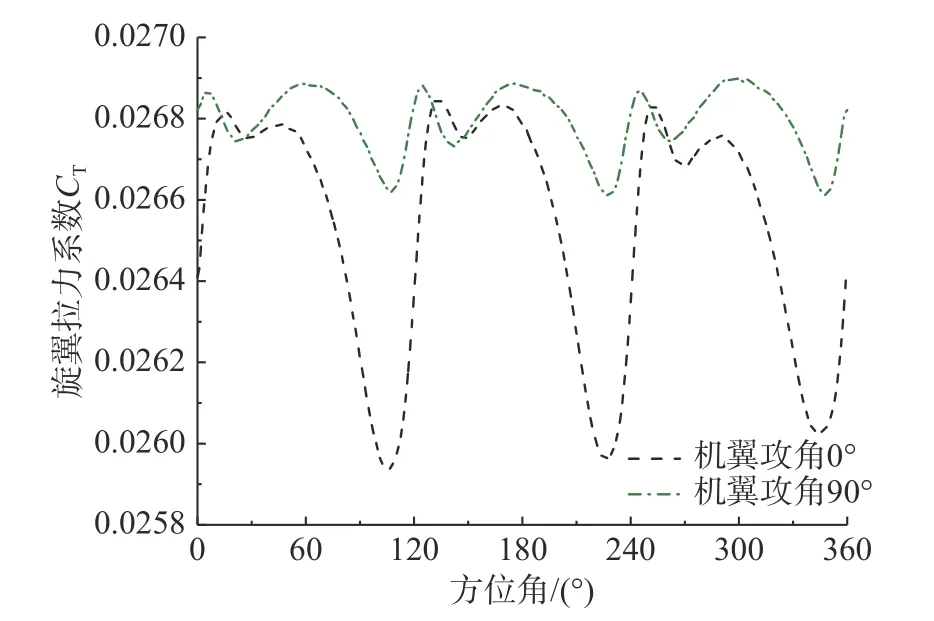
圖8 拉力系數(shù)隨方位角變化圖Fig.8 CT changing with azimuth

圖9 扭矩系數(shù)隨方位角變化圖Fig.9 CQ changing with azimuth
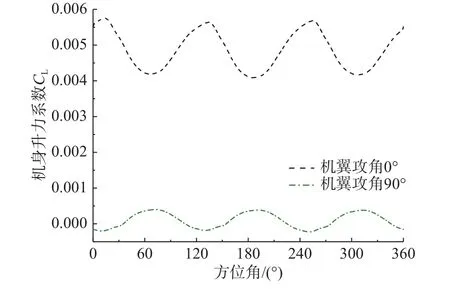
圖10 機(jī)身升力系數(shù)隨方位角變化圖Fig.10 CL of fuselage changing with azimuth
表4 為機(jī)翼攻角0°、90°兩種狀態(tài),各部件拉力/升力系數(shù)和扭矩系數(shù)的平均值與動態(tài)值對比表,平均值指旋翼旋轉(zhuǎn)一圈平均值,動態(tài)值指與平均值差值的最大值的絕對值。從表4 可以看出,0°機(jī)翼攻角時,對于單片槳葉,拉力系數(shù)動態(tài)值大,動態(tài)值與平均值比為9.8%;對于旋翼,拉力系數(shù)和扭矩系數(shù)動態(tài)值較小;對于機(jī)身,0°機(jī)翼攻角動態(tài)值與平均值比為18.38%,90°機(jī)翼攻角動態(tài)值與平均值比大,但其平均值小。這些結(jié)果對強(qiáng)度壽命評估能提供一定參考。
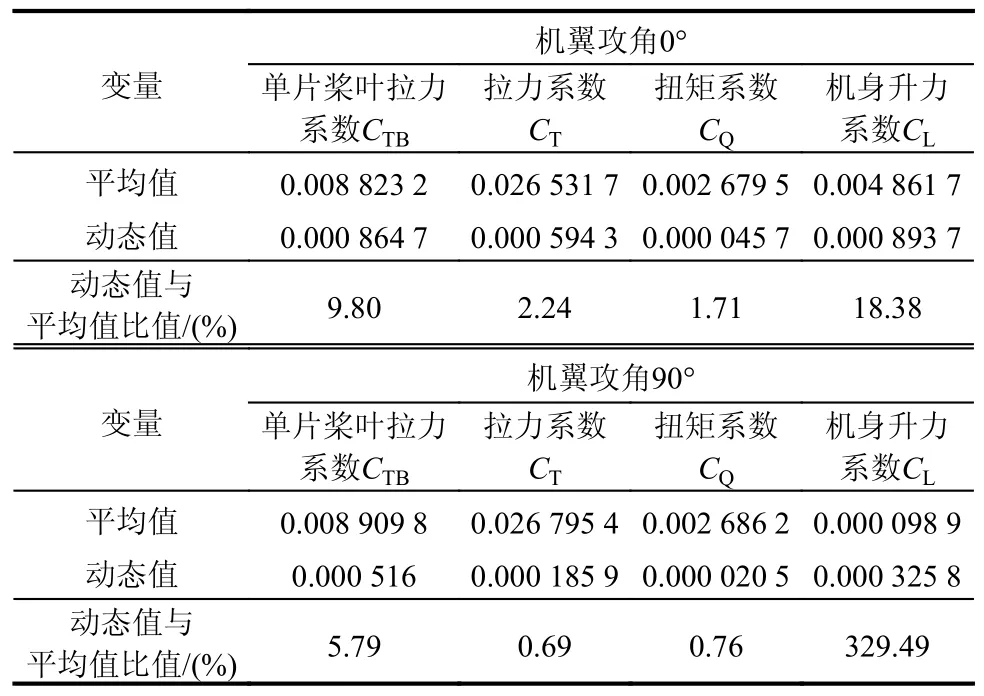
表4 平均值與動態(tài)值對比Table 4 comparison between average value and dynamic value
3.2 流場分析
選取槳葉總距12°狀態(tài)分析流場,圖11~圖16均由方位角0°數(shù)據(jù)繪制獲得。

圖11 機(jī)翼0°攻角下y 向速度云圖Fig.11 Vy cloud diagram at α=0°
圖11 為機(jī)翼0°攻角(α)下y向速度(Vy)云圖、圖12 為機(jī)翼90°攻角下y向速度云圖,云圖位置均為過旋翼中心且與x軸垂直的平面,圖11 和圖12中Vtip表示槳尖切向速度。從圖11 可以看出,氣流在對稱面存在明顯的向上速度,這是由于下洗流受到機(jī)翼機(jī)身的阻擋,改變流向向?qū)ΨQ面流動,相遇后再次改變方向向上流動;從圖12 可以看出,機(jī)翼傾轉(zhuǎn)90°后,對稱面上向上速度明顯減小,但受機(jī)身影響,也存在較小的向上速度。

圖12 機(jī)翼90°攻角下y 向速度云圖Fig.12 Vy cloud diagram at α=90°
圖13 為機(jī)翼0°攻角下機(jī)身表面壓力云圖,圖14為機(jī)翼90°攻角下機(jī)身表面壓力云圖。從圖13 可以看出,機(jī)翼攻角0°時,高壓區(qū)主要分布在槳葉正下方機(jī)翼上表面以及機(jī)身對稱面處;從圖14 可以看出,機(jī)翼攻角90°時,高壓區(qū)主要分布在槳葉正下方機(jī)翼前緣下表面處。
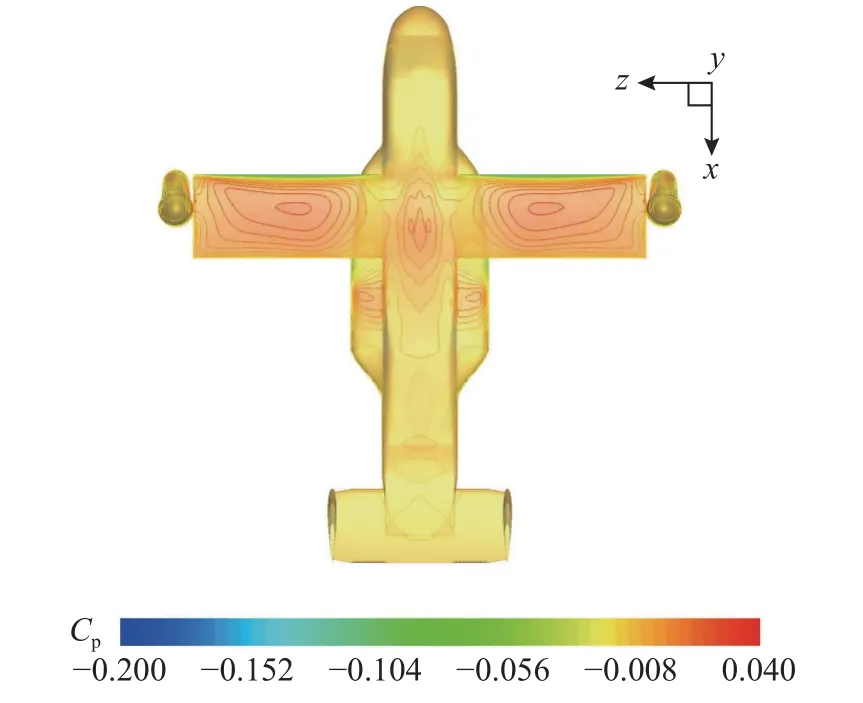
圖13 機(jī)翼0°攻角下機(jī)身表面壓力云圖Fig.13 Pressure cloud diagram of fuselage surface at α=0°

圖14 機(jī)翼90°攻角下機(jī)身表面壓力云圖Fig.14 Pressure cloud diagram of fuselage surface at α=90°
圖15 為機(jī)翼0°攻角下渦量云圖、圖16 為機(jī)翼90°攻角下渦量云圖,云圖位置均為過旋翼中心且與x軸垂直的平面。從圖15 和圖16 可以看出,在機(jī)身對稱面上形成一定渦,機(jī)翼攻角0°時,渦分布位置相對90°時更靠上方并且強(qiáng)度更強(qiáng),受旋翼、短艙及機(jī)翼影響,槳葉根部短艙周圍存在復(fù)雜渦分布。

圖15 機(jī)翼0°攻角下渦量云圖Fig.15 Vorticity cloud diagram at α=0°

圖16 機(jī)翼90°攻角下渦量云圖Fig.16 Vorticity cloud diagram at α=90°
4 結(jié)論
采用設(shè)計的計算模型,在計算范圍內(nèi),通過上述分析,得出了以下結(jié)論:
(1)該文采用的數(shù)值模擬方法能有效地模擬傾轉(zhuǎn)旋翼機(jī)懸停狀態(tài)氣動特性;
(2)當(dāng)不考慮機(jī)身氣動力時,機(jī)身對旋翼氣動特性影響不明顯,即孤立旋翼、機(jī)翼攻角0°和機(jī)翼攻角90°三種狀態(tài)下旋翼氣動特性差異不明顯;
(3)當(dāng)考慮機(jī)身氣動力時,機(jī)翼攻角0°時,機(jī)身產(chǎn)生向下氣動力與旋翼拉力占比平均為18.2%,機(jī)翼攻角90°時,平均為0.40%,這對機(jī)翼懸停狀態(tài)姿態(tài)設(shè)計、槳葉氣動設(shè)計以及指標(biāo)提出能提供一定參考;
(4)機(jī)翼攻角0°時,單片槳葉和機(jī)身氣動力出現(xiàn)強(qiáng)烈非定常特性,其中槳葉拉力系數(shù)動態(tài)值與平均值比為9.80%,機(jī)身升力系數(shù)動態(tài)值與平均值比為18.38%,這對槳葉、機(jī)翼強(qiáng)度與壽命評估能提供一定參考。