波浪條件下小型回轉體高速入水動力學特性研究
2024-03-11 12:18:56李江昊王光越郭林祥
數字海洋與水下攻防 2024年1期
李江昊,王光越,郭林祥
(1.清江創新中心,湖北 武漢 430076;2.中國船舶集團有限公司第七一〇研究所,湖北 宜昌 443003;3.中國特種飛行器研究所,湖北 荊門 448035)
0 引言
隨著現代戰爭的發展,為了提高突防能力,水中武器多向高速邁進,高速入水過程涉及的瞬態沖擊、自由液面破碎、流固耦合等問題存在強非線性特征,一直是海軍裝備研究的熱點和難點[1]。同時未來海戰也不可避免地會在波浪環境中發生,波浪的存在改變了入水自由液面的形態,而流場特性與物體運動呈強耦合影響,波浪環境會影響魚雷等跨介質武器入水時所受水動力載荷和彈道穩定性,因此探明波浪條件下跨介質武器入水載荷及運動姿態特性具有重要的實際意義[2]。
針對回轉體高速入水的問題,國內外學者開展了大量的研究[3]。顧建農[4]等人研究了不同頭型以不同速度水平入水的空腔發展以及入水彈道。施紅輝[5]等人用高速攝影儀拍攝了回轉體高速入水過程中的空腔演化形態以及空氣夾帶等非線性流動現象。TRUSCOTT[6]等人采用試驗手段,并運用高速攝影技術,對彈體斜入水的過程進行了捕捉,得到了彈體斜入水下的運動軌跡。SHI[7]等人采用任意歐拉-拉格朗日(ALE)方法研究了彈性水下機器人入水過程中頭部形狀參數、殼體厚度、入水速度對彈性水下機器人入水沖擊過程中加速度、壓力、應力和結構變形的影響。LYU[8]等人在三維多分辨率光滑粒子(SPH)的框架內進行了自由落體救生艇的入水動力學分析,結果表明SPH 模型與基于網格的求解器相比能更好的捕捉飛濺射流和散射液滴的能力。但以上高速入水研究均在靜水中開展,未考慮波浪環境的影響。
對于波浪環境下回轉體入水,李治濤[9]基于流體體積法(VOF)模擬了高速旋轉射彈波浪中入水過程,分析了波面不同位置入水彈體空泡形態和載荷特性變化規律。儲慧林[10]基于商業軟件Fluent建立了二維數值水槽,實現了規則波的模擬并實現波浪中魚雷垂直及傾斜入水過程,得到了魚雷波浪條件下入水砰擊壓力及彈道特性。楊曉光[11]等人開展了平靜水面,遭遇波面不同位置和不同波高下的入水試驗,得到了回轉體入水加速度和姿態角,結果表明由于波面的存在改變了回轉體入水的實際入水角度,且實際入水角度越小,入水沖擊載荷越小。以上波浪環境下入水的相關研究多基于網格方法進行模擬,其處理大變形和快速移動的自由表面相較于無網格粒子法略有不足。
本文基于多級分辨率SPH 方法,并結合周期性邊界技術,建立了回轉體波浪環境下高速入水模型,進而研究了不同相位下的回轉體高速入水空腔發展及回轉體動力學特性,為波浪條件下跨介質武器的低載穩定入水提供基礎性技術支撐。
1 數值計算方法
1.1 SPH 方法基本理論
本文采用了ANTUONO[12]等人提出的δ-SPH方法,該方法在模擬劇烈自由液面流動時足夠準確和穩定。由于其密度擴散項的增加,其可以在很大程度上減少由弱可壓縮假設引起的非物理壓力噪聲,δ-SPH 方法的主要控制方程如下:
式中:連續性方程和動量方程右側最后一項分別為密度耗散項和人工粘性項[15],其中的符號i和j表示粒子編號,D Dt表示跟隨流體微團運動的導數;r , v,p,ρ ,V,m分別代表流體的位置、速度、壓力、密度、體積和質量;g為重力加速度;系數α,δ根據不同問題取相應的值;W為核函數;h為光滑長度;c0,ρ0分別為流體聲速和流體密度。
1.2 SPH 數值造波技術
為了探究波浪條件下回轉體高速入水的動力學特性,本文基于有限水深波浪理論建立了波浪數值造波模型[15]。其中,x方向上波面方程為
式中:ω=2π/T,T為波浪周期;k= 2 π /L,L為波長;δ為初始相位,取0 到2π 之間的值。其中L可以根據色散方程得到:
式中,d為靜水深度。速度勢函數為
本文在三維波浪數值水池中,對波浪的入口和出口區域采用了周期性邊界技術[15]。當流體粒子流出計算域并進入右側的出口區域時,粒子攜帶著所有的物理信息,立刻轉移到流體區域的最左側,作為計算域的流入粒子。出口區域和入口區域的虛粒子由流體域兩側的粒子復制生成,作為計算域的邊界條件。采用周期性邊界后,可以模擬波浪的穩定流動,出口邊界和入口邊界的流量可以保持守恒。
1.3 入水數值模型驗證
為了驗證數值模型的計算精度,本文對小型回轉體高速入水進行數值模擬,通過與論文結果[16]對比,驗證了小型回轉體高速入水的數值計算精度。數值模型中回轉體與水面的夾角為20°,入水速度為70 m/s。水域尺度為10 m×5 m×2 m,小型回轉體模型如圖1所示,實驗模型轉動慣量
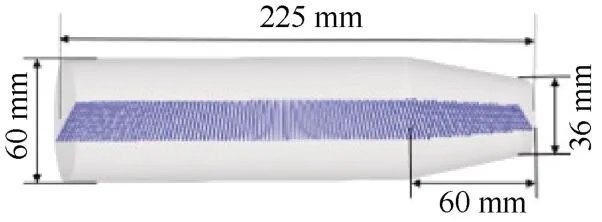
圖1 實驗模型圖Fig.1 Experimental model diagram
本文采用SPH 數值方法進行模擬,圖2 為實驗[3]與仿真不同時刻流場對比示意圖,圖中上半部分為實驗流場,下半部分為仿真流場,可以看到在實驗中,回轉體在高速入水初期處于超空泡狀態,回轉體入水后被超空泡包裹,在SPH 模擬的結果中也可以得到同樣的水動特性。將仿真結果與實驗結果對比,發現同一時刻,仿真與試驗的流場特性、空泡形態、回轉體入水深度能夠較好吻合,結果表明模擬中使用的SPH 數值模型可以捕捉空腔的發展情況從而驗證了SPH 模型在模擬回轉體高速入水上的可靠性和預測能力。

圖2 不同時刻實驗與仿真入水流場與彈道對比Fig.2 Comparison of flow field and trajectory of experimental and simulated inlet water at different time
由于該實驗模型關于縱平面對稱,因此軸向加速度是影響回轉體運動狀態的重要力學特性,為了進一步驗證仿真模型的載荷預測精度,本文對軸向加速度實驗結果[3]與軸向加速度仿真結果進行對比,如圖3所示。圖中紅色曲線代表SPH 仿真結果,黑三角代表實驗結果,通對比過可以得出,實驗結果與仿真結果曲線變化規律一致,且實驗與仿真軸向加速度峰值相對誤差約為2.1%。
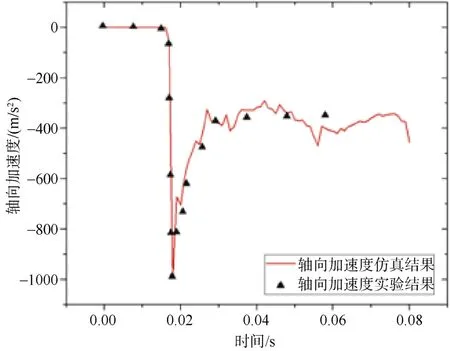
圖3 實驗與仿真軸向加速度對比Fig.3 Experimental and simulated axial acceleration
2 數值模型建立與典型工況模擬
2.1 數值模型的建立
為了探究波浪條件下小型回轉體高速入水動力學特性,首先要建立三維數值水槽。本文生成的波浪水槽,如圖4所示,波浪參數為波幅為0.5 m,波長為6 m,波浪周期為2.8 s。為了探究波浪條件下回轉體高速斜入水動力學特性,挑選了回轉體波浪條件下某一入水時刻作為典型工況分析,此刻高速入水的回轉體與水平面的夾角為20°,速度為70 m/s,為了方便理解,我們將回轉體入水速度與水平面的夾角叫做名義入水角。

圖4 回轉體波浪入水典型工況示意圖Fig.4 Schematic diagram of typical working conditions of wave entry of a rotary body
基于SPH 模型的波浪條件下小型回轉體高速入水仿真結果圖如圖5所示,從三維速度云圖中可以看出,當回轉體以70 m/s 入水時,回轉體撞擊波節,頭部周圍水域速度增大,并以橢圓形形狀進行速度傳遞,直到波節自由面流體速度與波峰處速度一致。

圖5 回轉體波浪條件下高速斜入水速度云圖Fig.5 Velocity cloud diagram of high-speed oblique entry under wave conditions of a rotary body
圖6 給出了波浪條件下回轉體高速斜入水過程中的空泡發展歷程,通過自由液面提取程序,將SPH 粒子圖轉化為清晰光順的自由液面云圖,并提取了處于工作區域內的波面,并成功捕捉到了回轉體高速入水空腔發展情況。由圖6 可以看出,在初始階段,回轉體撞擊波節形成空泡雛形,在侵入階段,回轉體與流場不斷作用,空泡逐漸形成,包裹在回轉體周圍,可以看出空泡壁比較光滑且尺寸不斷增大,并且在回轉體入水前端波面造成液面隆起的現象[17]。
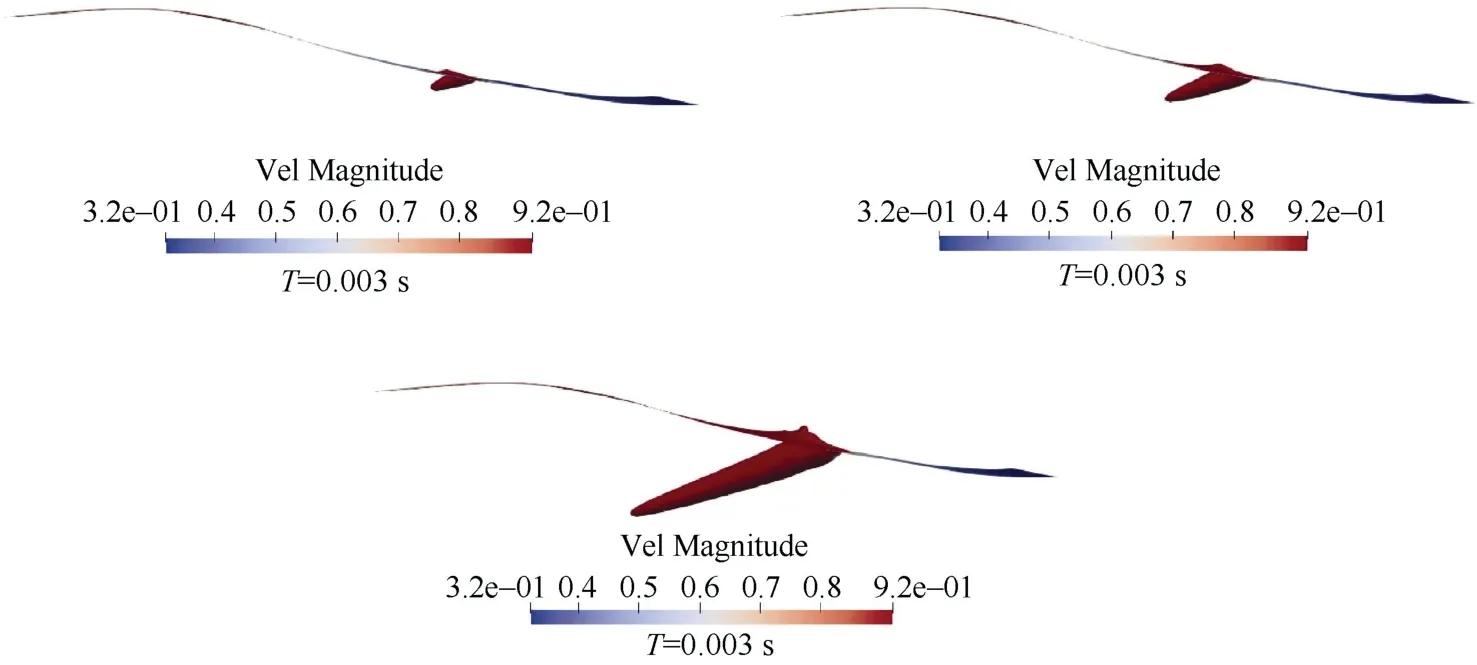
圖6 回轉體波浪條件下高速斜入水空泡示意圖Fig.6 Schematic diagram of high-speed oblique water cavitation under wave conditions of a rotary body
2.2 波浪對回轉體動力學特性影響
圖7 給出了靜水條件下入水角20°與波浪條件下名義入水角20°時的無量綱軸向加速度對比圖,由圖可以看出,當回轉體分別在靜水和波浪條件下入水時,波浪條件下回轉體入水載荷曲線與靜水條件下回轉體高速入水載荷曲線趨勢一樣,但峰值比靜水條件大。分析原因,波面的存在改變了回轉體與水面的實際夾角,我們將波面與回轉體的夾角定義為實際入水角,此刻回轉體波浪條件下實際入水角大于靜水條件下實際入水角,因此,回轉體軸向載荷峰值波浪條件較靜水條件大,當回轉體完全入水后,其軸向載荷趨于相等。

圖7 靜水與波浪條件下回轉體加速度對比Fig.7 Comparison of the acceleration of a rotary body in still water and wave conditions
圖8 給出了靜水條件下入水角20°與波浪條件下名義入水角20°時的回轉體俯仰角對比圖,由圖可以看出,此刻波浪條件下回轉體俯仰角變化較靜水條件下俯仰角變化小,即彈道穩定性越高。分析原因,波浪條件下回轉體實際入水角大于靜水條件下實際入水角,而實際入水角越大,彈體轉動角速率減小,運動穩定性強[18],因此波浪條件下回轉體彈道較穩定。
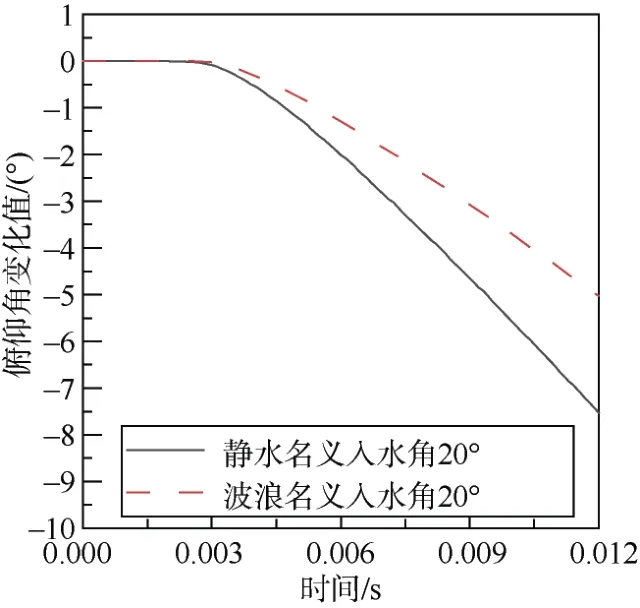
圖8 靜水與波浪條件下回轉體俯仰角對比Fig.8 Comparison of the pitch angle of a rotary body in still water and wave conditions
3 波浪條件下不同相位高速入水
3.1 不同相位高速入水工況分析
為了進一步分析波浪對回轉體高速入水動力學特性影響,本節將在上一節的基礎上,進一步探索回轉體在不同波浪相位下回轉體高速斜入水模型,通過分析不同相位下高速回轉體斜入水的軸向合力與偏轉角,掌握波面環境下回轉體高速入水的載荷特性與運動姿態,回轉體入水示意圖如圖9所示。

圖9 不同波浪相位回轉體斜入水示意圖Fig.9 Schematic diagram of oblique entry of different wave phases
波浪參數與上節一樣,回轉體模型與速度大小也保持一致,回轉體入水速度與水平面的夾角為20°。入水點相位分別為波峰、波谷、1 號波節、2號波節。由上一節規律可知回轉體不同波面條件下入水,發生改變的是波面的波傾角的大小,從而改變了回轉體的實際入水角。由計算可知,波峰處和波谷處的波傾角為0°,1 號波節處的波傾角為14°,2 號波節處的波傾角為-14°。回轉體正在波峰、波谷、1 號波節、2 號波節處的實際入水角分別為20°、20°、34°、6°,具體入水特征參數如表1所示。
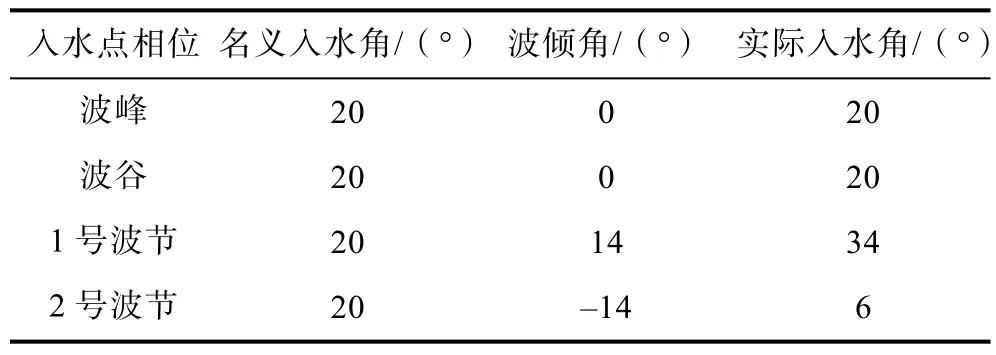
表1 回轉體波浪條件下不同相位入水特征參數Table 1 Characteristic parameters of water entry of different phases under wave conditions of a rotary body
3.2 不同相位高速入水彈道特性分析
圖10 為SPH 三維入水模型模擬的1 號波節處回轉體高速入水模擬圖,從圖中可以看到回轉體在1 號波節處入水,入水后產生的空腔包裹在回轉體周圍,且1 號波節處回轉體入水初期彈道較為穩定,未發生偏轉。

圖10 1號波節處回轉體高速入水模擬圖Fig.10 Simulation diagram of high-speed water entry of rotary body at the No.1 wave joint
圖11 為2 號波節處回轉體高速入水模擬結果圖,從圖中可以看出,當T=0.008 s 時回轉體彈道發生失穩,發生“跳彈”現象,回轉體頭部沖出水面。由表1 可知回轉體2 號波節處入水實際入水角等于名義入水角20°與入水點波傾角-14°的差值。由靜水條件下入水角度與回轉體動力學特性關系可知,隨著入水角度減小回轉體俯仰角變化增大,彈道失穩概率增加。由于波傾角的存在,此時回轉體高速入水實際入水角為6°,極容易發生俯仰角變化過大,而發生“跳彈”現象。

圖11 2號波節處回轉體高速入水模擬圖Fig.11 Simulation diagram of high-speed water entry of a rotary body at the No.2 wave joint
圖12 為波谷和波峰處回轉體高速入水示意圖,由圖可知,波峰處入水較波谷處入水,回轉體運動姿態更加穩定。分析原因:由表1 可知回轉體波峰處入水實際入水角等于波谷處實際入水角,但波峰處入水回轉體更接近自由液面,受到水體的上下壓強差較波谷處小,因此姿態較波谷處穩定。
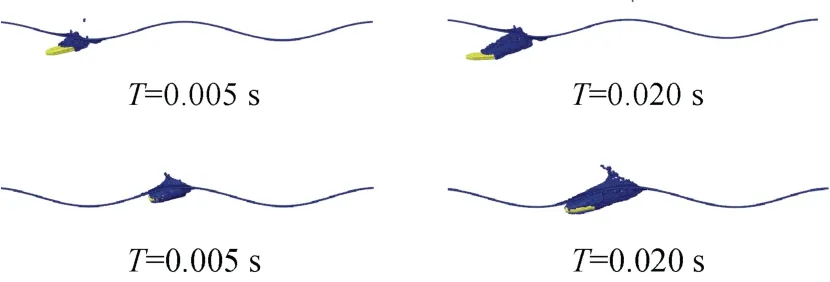
圖12 波谷波峰處回轉體高速入水模擬圖Fig.12 Simulation diagram of high-speed water entry of a rotary body at trough and crest
為了更好地分析不同相位下回轉體運動姿態變化情況,本節給出了不同相位下回轉體俯仰角和偏航角隨時間變化曲線圖。由圖13 可以看出,1號波節入水俯仰角變化最小,波峰和波谷俯仰角變化次之,2 號波節俯仰角變化最大,即2 號波節下回轉體入水姿態最不穩定,易發生失穩情況。分析原因,1 號波節回轉體實際入水角最大,在軸向載荷受力增大的情況下,入水穩定性得到了增加。2號波節回轉體實際入水角最小,雖然所受到的軸向載荷最小,但回轉體姿態卻變得不穩定,最容易發生失穩。
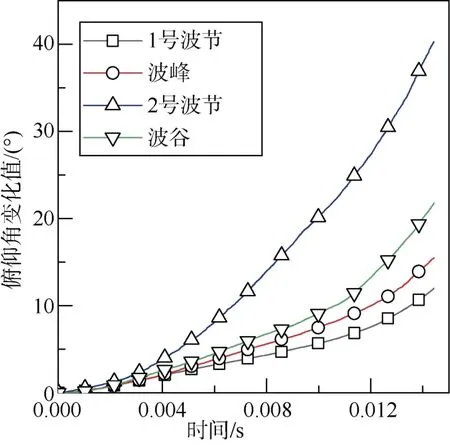
圖13 不同相位入水俯仰角變化值Fig.13 Variation of pitch angle in different phases of water entry
3.3 不同相位高速入水載荷運動特性分析
入水相位的改變不光影響了回轉體入水彈道,也影響入水初期軸向加速度峰值。圖14 為SPH 三維入水模型模擬的不同相位下回轉體高速斜入水的軸線加速度時歷曲線。由圖中可以看出不同相位下入水軸向加速度峰值不同,但入水后期入水軸向加速度值大致相同,說明波面的存在對回轉體入水載荷的影響主要體現在入水初始時刻,從曲線中可以看出波峰與波谷相位下回轉體軸向加速度峰值相同。分析原因在于波峰與波谷的回轉體實際入水角相同,而1 號波節相位下回轉體軸向加速度最大,2 號波節相位下回轉體軸向加速度最小,分析原因在于1 號波節回轉體實際入水角最大,2 號波節回轉體實際入水角最小。
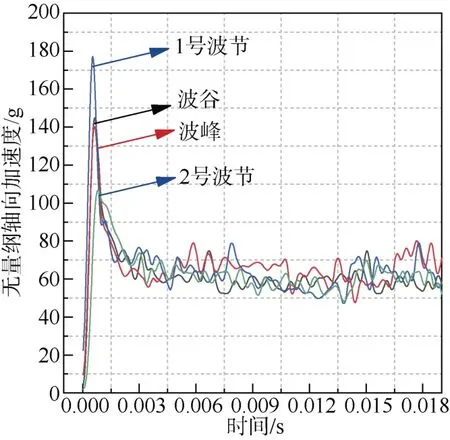
圖14 不同相位回轉體斜入水加速度對比Fig.14 Comparison of oblique water entry acceleration of different phased vehicles
4 結束語
本文基于光滑粒子流體動力學(Smoothed Particle Hydrodynamics,SPH)方法,建立了基于SPH 法多分辨率剛體入水的六自由度響應模型,實現了波浪環境下小型回轉體高速入水過程的數值模擬,對波浪環境中回轉體入水特征參數、運動姿態以及波浪相位對回轉體入水動力學特性影響規律進行探索,得出以下結論:
1)波面的存在改變了回轉體入水沖擊載荷和運動姿態,主要原因是波浪改變了回轉體與自由液面的夾角。由于波傾角的影響,回轉體1 號波節處實際入水角大于名義入水角,2 號波節處實際入水角小于名義入水角,波峰與波谷處實際入水角與名義入水角相等。
2)入水點相位對回轉體載荷和彈道特性有直接影響,1 號波節處入水載荷最大,但入水彈道更穩定;2 號波節處入水載荷最小,但彈道更易發生失穩;波峰波谷處載荷與彈道相近。
針對波浪條件下跨介質武器高速入水過程的水動力載荷預報和初始姿態變化預測等難題[19],通過開展波浪條件下回轉體高速入水過程的數值模擬,對波浪環境下回轉體入水過程中的運動姿態、沖擊載荷及流場演變特性等進行研究,為波浪條件下跨介質武器的低載穩定入水提供基礎性技術支撐。