基于ATRT的天花板清潔裝置設計
2024-03-13 07:17:42王玉勤曹振虎沈李祥
河南科技 2024年1期
關鍵詞:設計
胡 毅 王玉勤 周 生 曹振虎 沈李祥
(巢湖學院機械工程學院,安徽 合肥 238024)
0 引言
隨著城市化進程的不斷加快,住宅建筑物不斷增多,如何有效清理天花板附著污漬的問題日益凸出。傳統的天花板清潔作業往往采用人力清潔,存在人力成本高、安全隱患大、工作效率低等問題,已經無法滿足對天花板高效、安全的清潔需求。隨著我國人口老齡化比例不斷增加,勞動力成本逐年上升,清潔行業勞動力供不應求,因此智能化清潔已成為當下社會發展的必然趨勢[1]。
智能清潔行業的研究主要集中在開發智能化、自動化的清潔裝置方面。王濤等[2]設計了一種四軸并聯反射鏡式激光器,采用激光照射待清潔區即可清除污漬,且不傷害建筑物表面。曹智毅等[3]設計了雙層感應系統的懸浮清理機,通過智能平臺操作對建筑物天花板實施清潔工作。錢雯等[4]將清潔機器人和負壓螺旋技術相結合,設計了一款藍牙遙控屋頂清潔機器,可以有效解決天花板清潔問題。陸曉敏等[5]設計了一種基于MSP430f149 的智能清潔機器人,充分運用自動化設備的便捷技術,實現自主完成清理工作。上述研究在天花板清潔等高空作業領域均取得一定程度的進展,將促進今后智能清理機器人技術的發展。
針對當前社會對家用智能清理機器人的迫切需求,本文設計了一種基于ATRT 的天花板清潔裝置。該裝置結合了視覺圖像處理技術和空中軌跡識別技術,能夠感知天花板表面的污垢和雜物,并根據事先確定的清潔軌跡進行自主清潔操作。該裝置可以實時分析和處理天花板污漬。通過識別不同材質的天花板,裝置相應地調整清潔策略和力度,以確保清潔效果的高質量。
1 工作原理
基于ATRT 的天花板清潔裝置通過傳感器模組感知天花板的結構。這些傳感器可以掃描和測量天花板表面的特征,如邊緣、角落、標記或紋理,并定位各表面特征的位置。基于定位信息,裝置利用空中軌跡識別算法來規劃清潔路徑。按照規劃路徑,吸塵式機械臂進行清潔作業,清除天花板表面的塵埃、污垢或其他雜質。裝置配備的傳感器模組可以實時檢測和定位障礙物信息[6]。被捕獲的數據經解析后轉換為電信號,向裝置下達路徑更換指令或清潔操作終止指令,以避免與其他物體發生碰撞,降低潛在的危險。與此同時,裝置配備的紅外攝像頭可以捕捉天花板表面的圖像或視頻信息,實時監測清潔過程,并將其傳輸到操作臺,為操作人員下一步工作提供參考。天花板清潔裝置工作流程如圖1所示。
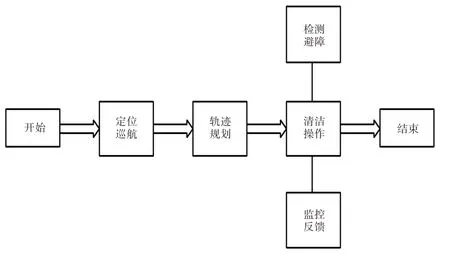
圖1 天花板清潔裝置工作流程
2 設計方案
2.1 裝置結構設計
清理裝置是清潔建筑物天花板的一種智能化產品,由推進模塊、清潔模塊、傳感器模塊、核心控制箱等模塊與裝置組成。裝置植入了ATRT 系統,利用傳感器獲取飛行器的空間位置和飛行姿態等信息,并將數據傳輸到數據處理系統中。依據處理后的數據,對裝置位置、速度和加速度等數據進行分析,利用軌跡識別算法來識別和跟蹤飛行器的飛行軌跡。裝置軌跡信息通過操作臺顯示出來,方便操作員對天花板的結構和幾何信息進行識別和分析,設計出快捷、高效的清潔路徑,并覆蓋整個天花板。
在使用過程中,操作人員首先遠程遙控裝置起飛,傳感器模組實時記錄飛行軌跡數據。當裝置到達目標區域時,紅外攝像頭對目標區域進行掃描,利用控制箱內的數據處理模塊分析對飛行路徑進行優化,設計出一套合理的清理方案。隨后,裝置上的吸塵式機械臂按照設定方案執行清潔工作,清潔作業完成后按照飛行軌跡原路返回。所設計的清潔裝置三維模型如圖2所示。

圖2 清潔裝置三維模型
2.2 驅動層設計
清理裝置的運動主要由驅動層來完成,可以支持裝置空中懸停和地面移動,其結構如圖3所示。
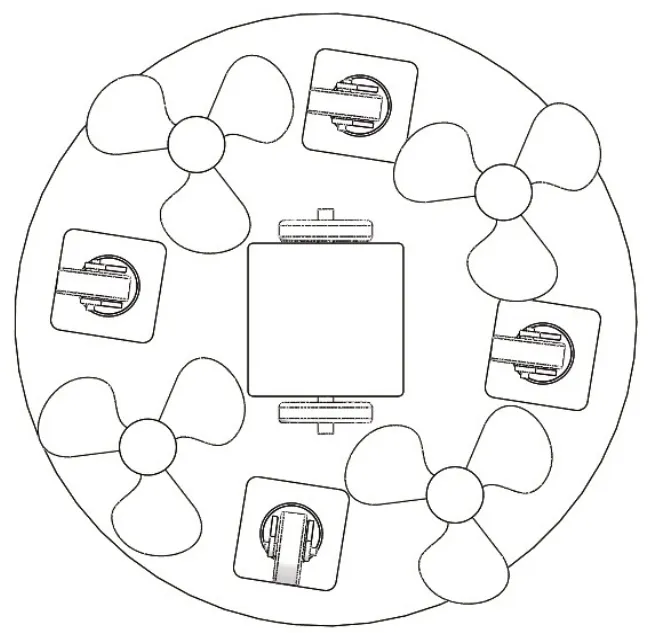
圖3 驅動層結構
通過下達指令可以調節驅動層中的電機轉動、齒輪傳動、鏈條傳動,從而切換輪子和機翼之間的運動模式。當設定為懸空飛行模式時,底盤中心的自驅萬向輪會收縮到底盤上方預留的空間內。機翼在電驅馬達的驅動下,實現飛行和懸空動作。機翼各屬性參數見表1。

表1 機翼屬性參數
當設定為地面驅動模式時,機翼停止工作,萬向輪自動彈出,電驅馬達驅動車輪移動。為保證裝置穩定性,設計了與萬向輪相連的液壓阻尼機構,緩沖萬向輪彈出瞬間的作用力。
2.3 臟物收集層設計
臟物收集層采用區域分化制作工藝,即灰塵、臟物收集區和電池倉,以節約空間,其結構如圖4所示。

圖4 臟物收集層結構
電池倉內安裝有蓄電池及壓電電池。所設計的壓電電池由壓電聚合物及鋁合金制成。當外力施加在壓電材料上時,材料的結構發生變化,導致內部正負電荷分離,形成電勢差,產生電壓。裝置在工作狀態時,壓電電池利用壓電效應將機械振動轉化為電能。由于壓電電池的電能產生量受到振動強度和頻率的限制,其所產生的電量主要用于裝置紅外傳感器模組及核心控制箱等微型電子設備供電[7]。而蓄電池則用于高能耗的電機、馬達等設備供電。該設計實現電能的分級管理和利用,可以節約電力。壓電電池主體結構如圖5所示。
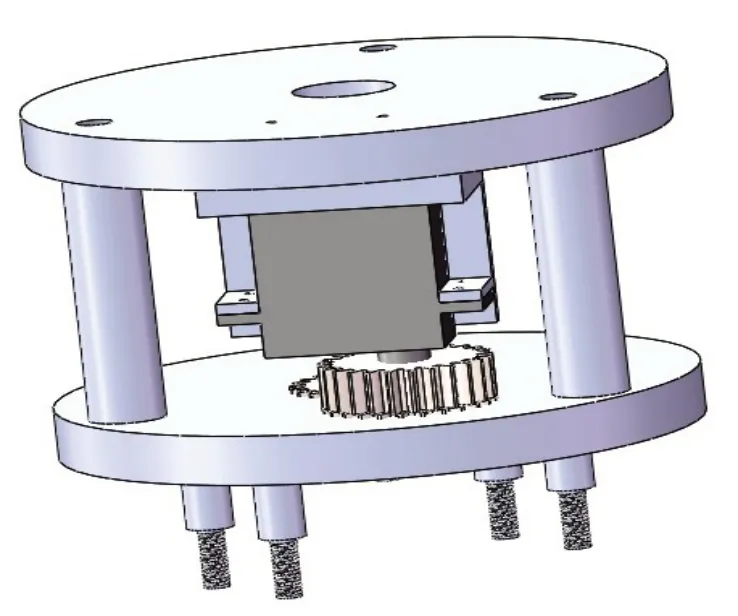
圖5 壓電電池主體結構
2.4 吸塵式機械臂設計
吸塵式機械臂主要由多自由度機械臂、吸塵管、真空吸塵口等結構組成,兼具了機械臂的靈活性和吸塵器的清潔能力,其結構如圖6 所示。多自由度機械臂由多個關節和連接件組成,可以模擬人的手臂運動[8],實現在三維空間內進行多軸運動,具有靈活的運動能力和準確的定位能力。機械臂的關節和運動控制系統可以根據需要完成精確的伸縮、旋轉和彎曲等動作,執行精細的操作,并適應不同的工作環境和任務需求。吸塵管是連接臟物收集層和機械臂的管道系統,由柔性材料制成,以便在機械臂運動時能夠自由彎曲和伸縮。吸塵管的主要作用是將機械臂產生的負壓傳遞到吸塵口,并將灰塵、污垢等物質吸入臟物收集層。機械臂上安裝有真空吸塵口,用于接觸和清潔目標表面,其內部有吸力孔,表面具有細小毛刷,可以大大增強清潔效果。

圖6 吸塵式機械臂
2.5 紅外傳感器頂蓋設計
紅外傳感器頂蓋主要由紅外攝像頭以及傳感器模組構成,其結構如圖7 所示。紅外攝像頭內置接收紅外輻射的半導體材質感光元件,可以將接收到的紅外輻射信號轉換成電信號。紅外攝像頭中的微型處理器將電信號放大,增強信號的強度,提高圖像的清晰度和質量。放大后的信號傳輸到核心控制箱內的處理器中進行可視化處理,從而生成圖像,便于操作人員觀察。傳感器模組是用來感知和測量各種物理量或環境參數的微型設備,可以將參數轉換為模擬信號后再轉換為數字信號[9]。核心處理器可以對數字信號進行讀取及解碼,同時,根據預先定義的算法對數據進行分析及處理,識別并提取出關鍵信息,以確定下一步行動內容。
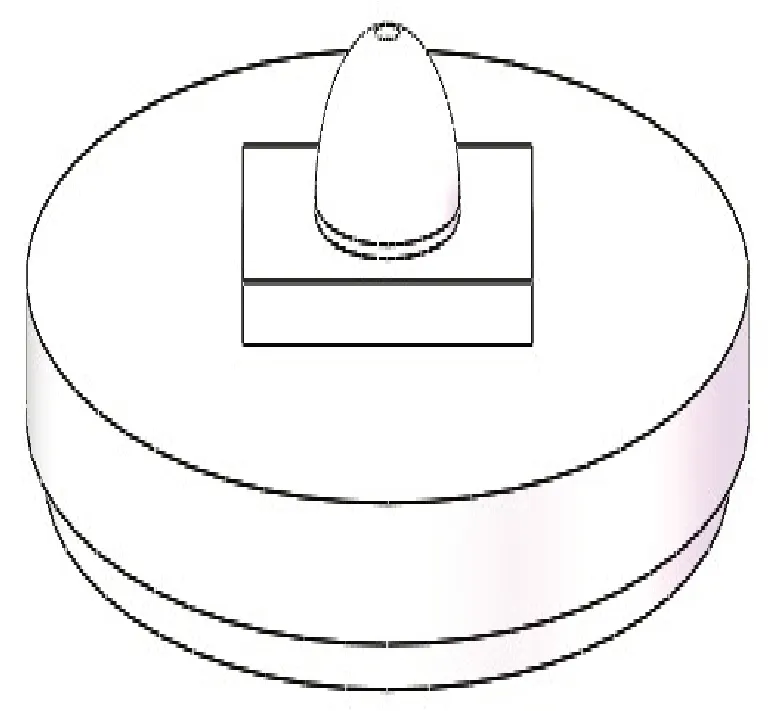
圖7 紅外傳感器頂蓋示意
2.6 核心控制箱設計
核心控制箱由主控板、驅動部分、電缸驅動器和無線接收模塊等組成,主要用來執行控制、驅動和監管工作,其結構如圖8 所示。通過接收和處理來自外部的指令信號,將其轉化為相應的控制動作。主控板用于監控和控制整個系統的運行狀態,并與其他部件進行數據交換和通信。驅動部分由電缸和電機構成,用來控制各種執行器的運動。電缸驅動器通過控制電機的轉速和方向來實現各種動作和運動。無線接收模塊主要用于接收無線信號,實現與無線遙控器或其他無線設備的通信功能。通過各模塊的密切協作,實現指令解析、運動控制和系統管理等功能,保證裝置正常運行。
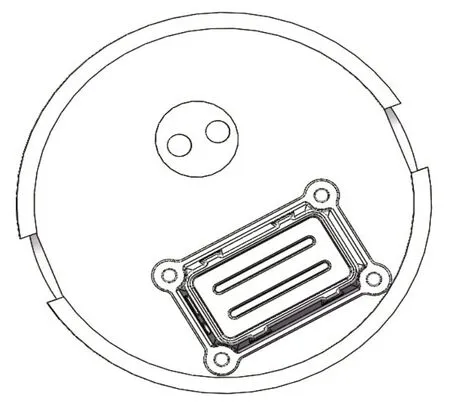
圖8 核心控制箱
2.7 空中軌跡識別系統設計
空中軌跡識別系統主要用于數據采集、數據處理和軌跡識別及預測。通過傳感器模組獲取無人機的位置、速度、高度、姿態和其他特征數據,利用核心處理器對數據進行接收、整合和解碼等操作。在數據處理的基礎上,采用空中軌跡識別算法提取和分析無人機的形狀、尺寸、動力系統、飛行模式等信息[10-12],從而識別無人機的當前位置、速度、加速度等信息,以便預測其運動軌跡。軌跡識別是一個持續循環的過程,通過不斷地采集數據、處理數據和識別軌跡,可以實現對無人機的實時監測和控制。
3 底板有限元計算分析
推進裝置底板是清理裝置重要的載荷部件,承擔著整個裝置的重量負荷。因此,底板的強度、抗疲勞強度以及在負載狀態下的屈服極限、變形和位移等結構性能必須滿足設計要求。可以通過靜力學分析來評估和檢驗所設計的底板結構是否合理。
利用SolidWorks 軟件中的Simulation 模塊對底板進行有限元分析,操作步驟主要包括選取材料、設置約束條件、劃分網格和計算結果分析等[13-15]。
3.1 選取材料
底板選用1060 合金。該材料具有優異的加工性能、塑性特性和耐腐蝕性以及良好的導電、導熱性能。底板材料屬性參數見表2。

表2 底板屬性參數
3.2 設置約束條件
約束條件主要包括零件固定及施加載荷。對底板中心圓孔內壁需要采用固定約束,選用力載荷,在底板內腔底面及四周分別施加600 N的力。
3.3 劃分網格
對底板模型進行實體網格劃分。網格的雅可比點設置為4 點,網格的單元數為4 862,節點數為9 624,其中,單元大小為6.8 mm,公差為0.3 mm。底板網格劃分如圖9所示。
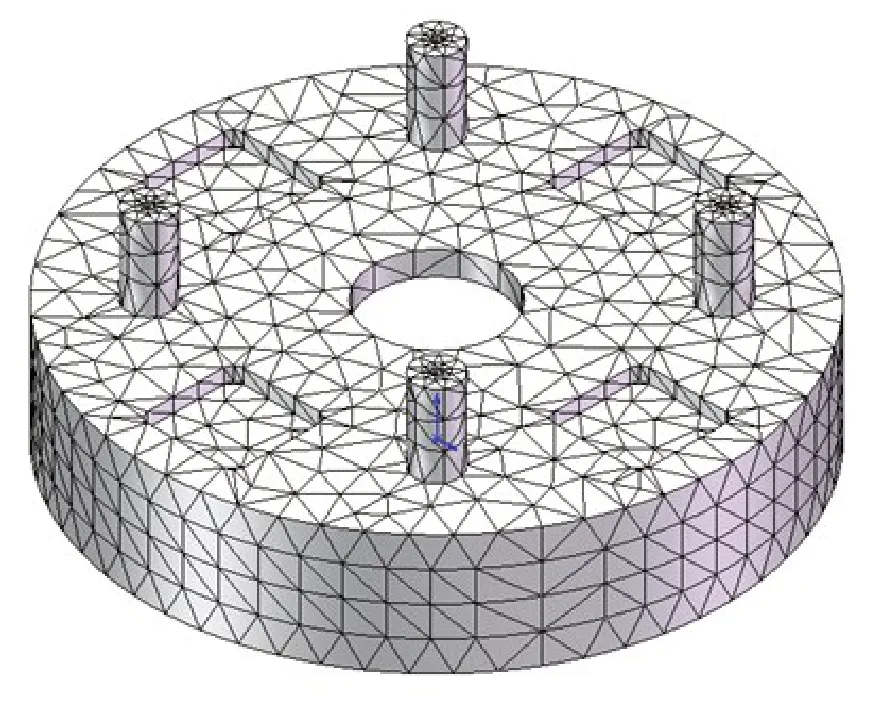
圖9 底板網格劃分
3.4 計算結果分析
通過應用赫茲式可以計算得到底板的最大應力和最大位移量[16]。將計算結果與有限元分析結果進行對比,即可判斷出所設計的底板算法滿足設計要求。
式(1)中:σmax表示最大應力值;δmax表示最大位移量;F表示法向力;R表示曲率半徑;V1和V2表示泊松比;E1和E2表示彈性模量。
通過Simulation 模塊運算得到底板的模擬結果,其應力、位移云圖模擬結果如圖10所示。
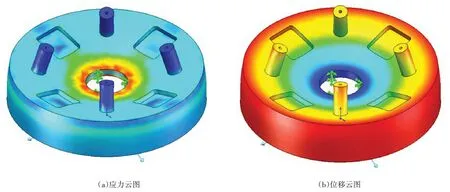
圖10 底板有限元計算結果
由式(1)計算得到σmax為2.757×107N∕m2,δmax為3.667×102mm。利用Simulation 模塊運算得到最大應力值為1.329×107N∕m2,最大位移量為2.646×102mm。可見,所設計底板的最大的應力值和最大位移量模擬運算結果均小于設計結果的許用數值。裝置底板的強度要求滿足實際使用需求,底座中心變形量在合理范圍內,該設計結構合理,安全可靠。
4 結語
本研究針對傳統天花板清潔費時費力且存在安全隱患等問題,設計了一種天花板清潔裝置。在對清潔裝置工作原理進行分析的基礎上,提出了基于ATRT 的清潔裝置設計方案。該方案可以合理規劃飛行路徑,實時監測和識別作業畫面,提高了清理效率。該方案搭建了清潔裝置三維結構模型,設計了裝置主要結構部件,利用SolidWorks 軟件中的Simulation 模塊對底板進行有限元分析,并將運算結果與理論設計結果進行對比。對比結果顯示,基于有限元分析計算得到的底板最大的應力值和最大位移量均小于理論計算結果。研究可知,本研究設計的底板強度滿足使用要求,符合設計規范。基于ATRT 的天花板清潔裝置集成了視覺圖像處理技術和空中軌跡識別技術,可以快速、精準地開展清理工作,為高效、安全和可持續的智能清理裝置設計提供了解決方案,具有廣泛的應用前景。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
