基于STM32的視覺識別導(dǎo)盲機器人設(shè)計
2024-03-14 06:43:14劉夢禹田志宏
自動化儀表 2024年2期
劉夢禹,田志宏,朱 濤
(1.天津科技大學(xué)電子信息與自動化學(xué)院,天津 300222;2.天津科技大學(xué)人工智能學(xué)院,天津 300457)
0 引言
根據(jù)世界衛(wèi)生組織統(tǒng)計,目前世界上約有2.85億名視力障礙人士,其中3 900萬名為盲人。中國目前調(diào)查發(fā)現(xiàn)存在2 100萬名視力障礙者,其中的23.8%是盲人[1]。視覺障礙群體的不斷擴大,使導(dǎo)盲設(shè)施市場的需求快速增長。不僅如此,隨著城市建設(shè)的逐步提升,人們的居住環(huán)境也在發(fā)生著變化,傳統(tǒng)的導(dǎo)盲設(shè)備已經(jīng)無法適應(yīng)這種變化[2]。因此,導(dǎo)盲機器人應(yīng)需而生,并且逐漸受到行業(yè)的高度關(guān)注。
目前,全球各國關(guān)于導(dǎo)盲輔助方面的研究工作已經(jīng)展開,研究重點集中在手杖類行進輔具、穿戴式行進輔具以及移動式行進輔具這3個方面[3]。隨著現(xiàn)代科技的不斷發(fā)展,智能機器人逐漸進入人們的生活,并且已經(jīng)成為盲人生活中的一部分。如何將傳感技術(shù)融合到機器人的運動控制中,已成為當(dāng)今智能機器人技術(shù)領(lǐng)域較為關(guān)鍵的課題。
為此,本文設(shè)計了1種智能化移動式導(dǎo)盲機器人。該設(shè)計在實現(xiàn)避障、定位功能的基礎(chǔ)上,縮小了機器人的體積并減少了質(zhì)量。本文優(yōu)化傳感器的設(shè)計,進一步實現(xiàn)傳感器結(jié)構(gòu)的小型化和輕量化[4]。此外,本文結(jié)合日益完善的圖像識別技術(shù),使導(dǎo)盲機器人更加智能化、人性化,以達到幫助盲人真切感知周圍環(huán)境的目的。
1 導(dǎo)盲機器人整體方案設(shè)計
本文設(shè)計的導(dǎo)盲機器人以STM32為主控制器、Jetson Nano為輔助控制器,搭載超聲波、藍牙、全球定位系統(tǒng)(global positioning system,GPS)、攝像頭、蜂鳴器等多種傳感器。該導(dǎo)盲機器人能夠?qū)崿F(xiàn)以下功能:超聲波傳感器自動避障;藍牙模塊運動控制;GPS定位;攝像頭識別車輛、行人、路肩等;檢測到行人時蜂鳴器報警。
導(dǎo)盲機器人系統(tǒng)框架可具體分為主控模塊、運動控制模塊、避障模塊、定位模塊以及供電模塊。
1.1 工作原理介紹
單片機驅(qū)動電機驅(qū)動板通過脈沖寬度調(diào)制(pulse width modulation,PWM)電路波調(diào)壓的方式控制后兩輪電機的速度,通過PWM驅(qū)動舵機控制前兩輪的轉(zhuǎn)向。STM32通過串口與GPS模塊、藍牙模塊進行通信,實現(xiàn)位置信息的獲取。超聲波模塊受STM32的直接控制,對正前方障礙物進行避障分析。輔助控制器Jetson Nano與相機串行接口(camera serial interface,CSI)攝像頭通信獲取前方160°廣角視線范圍信息,進而與內(nèi)部已采集的車輛、路標(biāo)、行人等數(shù)據(jù)進行對比分析。通用同步異步收發(fā)器(universal synchronous asynchronous receiver and transceiver,USART)1向STM32發(fā)送對應(yīng)字符串,改變其標(biāo)志位,從而改變其狀態(tài)位,進而控制機器人行進,實現(xiàn)輔助避障。工作原理框架如圖1所示。

圖1 工作原理框架圖
1.2 硬件部分設(shè)計
1.2.1 主控電路設(shè)計
STM32負責(zé)底層運動控制、超聲波傳感器和GPS模塊。Jetson Nano 負責(zé)視覺信息處理與分析。2個主控模塊通過串口進行通信。
①STM32介紹。
在主控制器的選擇部分,因為所設(shè)計的導(dǎo)盲機器人應(yīng)用的傳感器類型較多,導(dǎo)致占用串口較多(3個)、輸入/輸出(input/output,I/O)口較少,所以本文選擇STM32單片機。該單片機采用ArmCortex-M3內(nèi)核[5],為哈佛結(jié)構(gòu),擁有獨立的指令總線和數(shù)據(jù)總線,具有功能強大、響應(yīng)快、低功耗、工作溫度區(qū)間寬等優(yōu)勢,被廣泛應(yīng)用于機器人運動控制。
②Jetson Nano介紹。
Jetson Nano A02是一款開源硬件,擁有計算統(tǒng)一裝置架構(gòu)(computer unified device architecture,CUDA)核心、128-coreMaxwell圖形處理器(graphics processing unit,GPU)、4 GB大容量內(nèi)存、5 W低功耗。相較于Raspberry Pi或其他人工智能(artifical intelligence,AI)邊緣計算單元,Jetson Nano A02的圖像處理能力強、功耗低、性價比高[6]。很多算法可因此獲得實時性能。因此,本文將Jetson Nano A02作為視覺識別部分的主控。Jetson Nano接口如圖2所示。

圖2 Jetson Nano接口
1.2.2 運動控制設(shè)計
導(dǎo)盲機器人運動控制設(shè)計采用伺服驅(qū)動系統(tǒng)。其中,TBSK20舵機直接以PWM電路波調(diào)壓的方式接收STM32信號,從而控制前兩輪轉(zhuǎn)向,以決定機器人的行進方向。TB6612驅(qū)動板同時驅(qū)動2個直流電機來控制后輪,并運用PWM技術(shù)改變占空比來控制電機轉(zhuǎn)速,進而控制機器人的行進速度。
首先,與傳統(tǒng)的差速系統(tǒng)相比,伺服驅(qū)動系統(tǒng)可使機器人電機動力直接轉(zhuǎn)換為驅(qū)動力。轉(zhuǎn)向機構(gòu)則由獨立舵機控制。其結(jié)構(gòu)更加簡單、緊湊,控制效率和穩(wěn)定性更高。其次,以軟件為主導(dǎo)的動力系統(tǒng)可以根據(jù)軟件定義不同的方式或系統(tǒng)的工作條件進行調(diào)整,因而操作難度更低、更智能。同時,輪胎與配件損耗較小,可滿足長時間穩(wěn)定運行的應(yīng)用需求,在柔性控制方面有很大的優(yōu)勢。舵機接口如圖3所示。
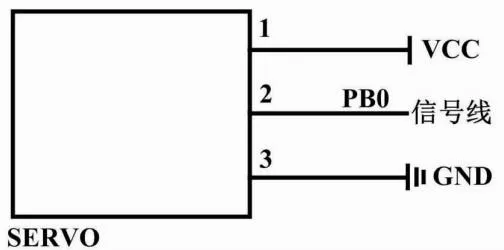
圖3 舵機接口
1.2.3 避障模塊設(shè)計
導(dǎo)盲機器人搭載了超聲波傳感器和視覺傳感器。兩者均可獨立實現(xiàn)避障功能。
超聲波傳感器選用HC-SR04模塊,測距精度為3 mm,可提供2~400 cm的非接觸式距離感測功能。該超聲波傳感器的測距原理是依據(jù)超聲波在空氣中傳播的速度,通過計算源聲波發(fā)送時刻和回波信號接收時刻的時間間隔來獲取障礙物的距離信息[7]。
(1)
式中:h為測試距離;t為高電平時間;v為聲速,為340 m/s。
視覺傳感器采用Jetson Nano NX AI高清攝像頭。該攝像頭具有160°對焦視場廣角,感光芯片為索尼IMX219。相較于柔性印制電路板(flexible printed circuit,FPC)標(biāo)準(zhǔn)攝像頭系列,Jetson Nano NX AI的視角更廣闊、靈敏度更高、掃描效率更快,非常適合圖像數(shù)據(jù)采集和信息處理。
Jetson Nano和STM32之間包含串口通信、串行外設(shè)接口(serial peripheral interface,SPI)通信、集成電路總線(inter-integrated circuit,I2C)通信等多種通信方式。本文選擇使用USART1進行通信。通信過程如下。首先,Jetson Nano與STM32的TX端與RX端通過晶體管-晶體管邏輯(transistor transistor logic,TTL)電平模塊交叉連接。然后,相同的串口通信參數(shù)和協(xié)議得以確定,如串口波特率均為115 200 bit/s、字長為8 B的數(shù)據(jù)格式和1個停止位以及無奇偶校驗位等。最后,串口通信程序得以編號,例如在STM32中調(diào)用USART_SendString、USART_SendArray等函數(shù)、Jetson Nano中調(diào)用Python的Pyserial庫。當(dāng)Jetson Nano識別到指定物體時,采集到的圖像數(shù)據(jù)將編碼為JPEG格式發(fā)送給STM32。STM32接收指令,控制機器人行進,并輔助避障。
1.2.4 GPS模塊設(shè)計
GPS定位模塊使用中科微電子的ATGM336H。ATGM336H通道數(shù)目為32,冷啟動捕獲靈敏度為-148 dBm,跟蹤靈敏度為-162 dBm,定位精度為2.5 m(即GPS定位在2.5 m精度的概率為50%),支持北斗衛(wèi)星導(dǎo)航系統(tǒng)(Beidou navigation satellite system,BDS)/GPS/格洛納斯全球衛(wèi)星導(dǎo)航系統(tǒng)(glonass global navigation satellite system,GLONASS)的單系統(tǒng)定位[8],以及任意組合的多系統(tǒng)聯(lián)合定位的接收機模塊。ATGM336H可以直接替換U-blox的MAX系列多款GPS模塊,主要接口信號Pin-Pin兼容,安裝孔一致,功耗低,內(nèi)置天線檢測電路,具有天線短路保護功能。
1.2.5 供電模塊設(shè)計
因為驅(qū)動模塊較多,所以機器人采用兩部分電源分別給STM32和Jetson Nano供電。機器人采用3節(jié)12 V/1 500 mA電源給STM32供電,并采用另外3節(jié)相同電源,利用AMS1117 5.0正向低壓降穩(wěn)壓器向Jetson Nano 供電。經(jīng)測試,當(dāng)開啟所有功能后,蓄電時長可達2 h。
1.3 軟件部分設(shè)計
1.3.1 底層架構(gòu)部分
底層架構(gòu)部分軟件流程如圖4所示。

圖4 軟件流程圖
機器人主控制器STM32以KeilμVision5為編譯環(huán)境、C語言為編譯語言,用于實現(xiàn)機器人多個功能的綜合控制,在不同的操作觸發(fā)下調(diào)用不同程序來實現(xiàn)相應(yīng)功能。這些功能主要包括電機控制程序、舵機控制程序、超聲波測距程序、GPS定位程序和藍牙串口通信程序。通過整合上述各子程序,完成系統(tǒng)的流暢運行。主要代碼如下。
int main(void)
{
u8 car_status = 0;
u16 car_speed_flag = 0;
u8 car_angle_flag = 0;
u8 car_avoidance_flag = 0;
u16 dcsr04_distance = 0;
USART1_Init(115200);
USART2_Config(9600);
USART3_Config(9600);
HCSR04_Init();
MOTOR_Init();
Stop();
……}
1.3.2 圖像識別——模型訓(xùn)練算法
本文針對目標(biāo)識別方面使用到的程序為經(jīng)過AlexeyAB改良過的darknet框架下的你只看一次(you only look once,YOLO)v3算法。該算法在實時目標(biāo)檢測領(lǐng)域中擁有較強的性能,能夠契合Jetson Nano的算力。該算法在Jetson Nano中實時運行時可以達到較高的檢測速率,能夠應(yīng)對日常生活中90%的場景[9]。圖像解析流程如圖5所示。

圖5 解析流程圖
YOLO v3算法已經(jīng)提供了圖像識別的權(quán)重。YOLO v3算法采用分而治之的方法,將圖片劃分成單元格進行識別。在接收圖片后,YOLO v3算法根據(jù)圖像的尺寸進行尺寸解析。解析后的數(shù)據(jù)與訓(xùn)練數(shù)據(jù)進行比較[10]。本文將系統(tǒng)的串口權(quán)限設(shè)為上電默認打開,將圖像的實時解析腳本放在開機啟動項中。系統(tǒng)上電后,自動運行檢測腳本:在未識別到障礙物時,向串口發(fā)送數(shù)據(jù);在識別到障礙物時,將障礙物的信息通過串口的方式發(fā)送給機器人端。
在部署Jetson Nano之前,可以使用更高算力的設(shè)備來進行訓(xùn)練。比如,可先在個人計算機(Windows平臺)中采用由德國卡爾斯魯厄理工學(xué)院(Karlsruher Insttut für Technoogie,KIT)聯(lián)合豐田工業(yè)大學(xué)芝加哥分校(Toyota Technological Institute at Chicago,TTIC)發(fā)布的KITTI數(shù)據(jù)集進行訓(xùn)練。模型使用Windows訓(xùn)練平臺,具體參數(shù)如下。中央處理器(central processing unit,CPU)為AMD Ryzen 9 4900H。圖形處理器(graphics pracessing unit,GPU)為NVIDIA GeForce RTX 2060。存儲空間為10 GB硬盤,包括OpenCV軟件庫和CUD NN網(wǎng)絡(luò)庫。所使用的數(shù)據(jù)集為KITTI-road。步驟可分為數(shù)據(jù)處理、訓(xùn)練、使用與部署。
2 試驗測試與結(jié)果
機器人主控STM32通過串口與藍牙模塊HC-06進行通信,可通過移動端藍牙調(diào)試助手應(yīng)用(application,APP)測試其運動控制功能與定位功能。藍牙軟件配置過程如下:首先開啟藍牙權(quán)限,在“設(shè)備連接”功能欄中搜索“HC-06”并成功連接;然后在“按鈕控制”功能欄打開編輯模式,分別將數(shù)據(jù)b、e、d、a、c發(fā)送到“OK”“RIGHT”“LEFT”“UP”“DOWN”按鈕;最后退出編輯模式,便可通過藍牙控制機器人運動。當(dāng)處于室外時,進行GPS定位功能測試,在頁面頂端或“對話模式”功能欄獲取經(jīng)緯度信息。經(jīng)10次測試,捕獲延遲時間平均為3 s。
超聲波模塊測距測試中,利用Timer定時器的PWM輸出、輸入捕獲功能提高超聲波測距精度。多次測試結(jié)果表明,超聲波模塊4 m內(nèi)測距相對誤差為4 cm。在完成測距模塊檢測后,進一步測試其避障功能。在機器人正前方設(shè)置1個長方體木箱(20 cm×20 cm×40 cm)作為障礙物,點擊“UP”按鈕之后不進行任何人為控制操作。當(dāng)機器人與木箱距離約為15 cm時,舵機控制機器人右轉(zhuǎn)彎。試驗結(jié)果驗證了避障功能的有效性。圖像識別測試可以在Windows訓(xùn)練平臺上通過使用指令darknet.exe detector map cfg/xxx1.data cfg/xxx2.cfg backup/xxx.weights計算backup路徑下權(quán)重文件的mAP(全類平均精度)值,進而查看訓(xùn)練的效果。若對圖片進行測試,則輸入指令darknet.exe detector test cfg/xxx.data cfg/xxx.cfg xxx.weights xxx.jpg。若對視頻進行測試,則輸入指令darknet.exe detector demo cfg/xxx.data cfg/xxx.cfg xxx.weights。通過darknet程序的統(tǒng)計計算,在預(yù)設(shè)的7種基礎(chǔ)分類中,路肩、車道、立柱、汽車這4種分類的平均準(zhǔn)確率為90%。而交通標(biāo)識、人、樹由于樣本數(shù)量不足(人工標(biāo)識數(shù)量不夠)的原因?qū)е聹?zhǔn)確率僅為80%[11]。識別分類評價指標(biāo)結(jié)果如表1所示。
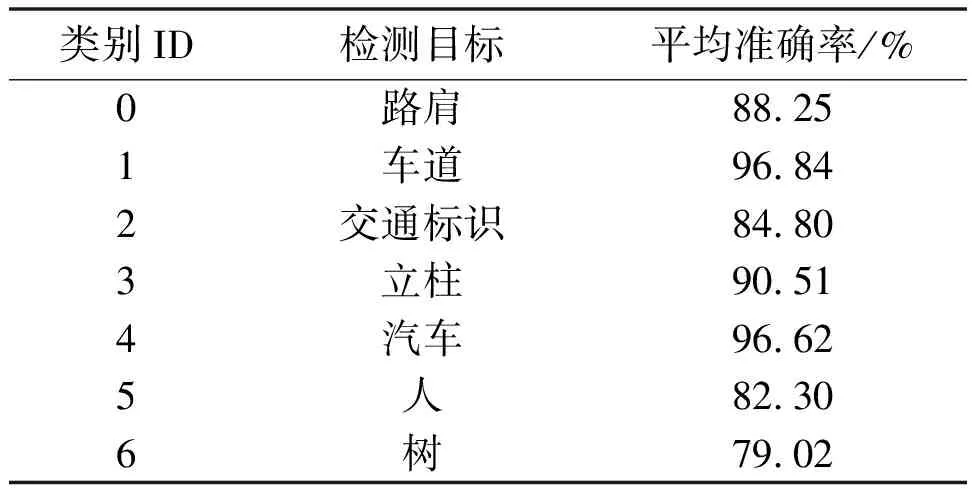
表1 識別分類評價指標(biāo)結(jié)果
模型的交并比(intersection over union,IoU)指標(biāo)表示該模型對對應(yīng)目標(biāo)預(yù)測的檢測框的準(zhǔn)確程度,即模型建立的檢測框是否在準(zhǔn)確的位置上。一般認為IoU值大于50%即為正確的檢測框。在本文模型中,該指標(biāo)平均值為68.07%。此外,模型在IoU閾值規(guī)定為0.5時,mAP為88.33%[12]。分析結(jié)果顯示,對于YOLO置信度閾值為0.25時,準(zhǔn)確率為0.88,召回率為0.87,綜合評判指標(biāo)F1-score為0.88。
3 機器人創(chuàng)新點
本文所設(shè)計的基于STM32的導(dǎo)盲機器人具有以下創(chuàng)新點。
①本設(shè)計添加了GPS定位功能,盲人家屬可以隨時查看盲人的位置信息。
②本設(shè)計搭載Jetson Nano AI邊緣計算單元,配合Jetson Nano NX AI高清攝像頭,可實現(xiàn)識別包括路肩、車道、立柱、汽車、交通標(biāo)識、人、樹在內(nèi)的7類圖像,高效保障盲人出行安全。
③本設(shè)計當(dāng)攝像頭識別圖像并判斷為行人時,蜂鳴器會發(fā)出警報,輔助盲人提高警惕。
④本設(shè)計電源模塊采用2塊電池分別向STM32與Jetson Nano供電,避免了因供電不足而導(dǎo)致傳感器失效的問題,提高了導(dǎo)盲機器人蓄電時長,可以實現(xiàn)盲人在社區(qū)及附近地區(qū)實行必要的生活行為。
4 結(jié)論
本文采用YOLO v3識別算法,設(shè)計了具有視覺識別功能的導(dǎo)盲機器人。試驗結(jié)果表明,機器人運動控制靈活、定位延遲低、視覺識別精準(zhǔn)。本文設(shè)計能夠?qū)崿F(xiàn)輔助盲人出行并提高其出行安全系數(shù)的功能,具有低功耗、易攜帶的優(yōu)勢。該設(shè)計可廣泛應(yīng)用于盲人所在社區(qū)及附近場所、盲人學(xué)校、盲人機構(gòu)等地。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
中國科技論壇(2017年7期)2017-07-25 08:49:53
Coco薇(2017年5期)2017-06-05 08:53:16
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學(xué)報(2016年1期)2017-01-20 08:21:20
中國中醫(yī)藥現(xiàn)代遠程教育(2014年22期)2014-03-01 04:32:55
