基于混合策略改進的鵜鶘優(yōu)化算法*
2024-03-15 07:37:14蘇瑩瑩任曼銅
制造技術(shù)與機床 2024年3期
蘇瑩瑩 任曼銅
(沈陽大學機械工程學院,遼寧 沈陽 110044)
鵜鶘優(yōu)化算法(pelican optimization algorithm,POA)[1]是2022 年由Pavel Trojovsky和Mohammad Dehghani 提出的一種新的自然啟發(fā)優(yōu)化算法。POA設(shè)計的主要思想是模擬鵜鶘在狩獵過程中的自然行為。該算法分為兩個階段,第一個階段是向獵物移動(探索階段),種群通過在搜索空間不斷掃描獲取獵物位置并向其移動;第二階段是在水面上展翅(開采階段),鵜鶘種群通過不斷更新迭代獲取最佳捕食位置。與經(jīng)典的遺傳算法、新興的黑猩猩算法等群智能優(yōu)化算法相比,POA 具有尋優(yōu)能力強、參數(shù)較少、易于實現(xiàn)等優(yōu)勢。一些學者將POA 應用于工程領(lǐng)域,例如董青等[2]利用POA 建立橋架結(jié)構(gòu)壽命預測的優(yōu)化加點代理模型,實現(xiàn)對橋架結(jié)構(gòu)安全性的預測;朱錫山等[3]提出一種新的鵜鶘優(yōu)化算法-卷積神經(jīng)網(wǎng)絡(luò)-堆疊回歸模型(POA-CNNREGST)對電梯鋼絲繩滑移量進行預測,利用POA 對CNN-REGST 模型進行優(yōu)化,提高了電梯安全狀態(tài)評估的準確性。Al-Wesabi F 等[4]提出了一種在物聯(lián)網(wǎng)中采用聯(lián)邦學習驅(qū)動攻擊檢測和分類技術(shù)的鵜鶘優(yōu)化算法(POAFL-DDC),利用POA 對DBN 超參數(shù)進行優(yōu)化。結(jié)果表明,POAFL-DDC 取得了更好的結(jié)果。然而,POA 在捕食階段,必須考察鵜鶘鄰域范圍才能收斂到較好解,因此基于鄰域進行搜索時,雖然具有較強的局部搜索能力,但對全局的搜索能力不足。針對這些問題,Song H M等[5]提出了一種基于混沌干擾因子和初等數(shù)學函數(shù)的改進POA,在探索階段引入了10 種不同的混沌干擾因子。選擇出性能最優(yōu)的改進POA 后,在POA 的利用階段引入6 種不同的初等數(shù)學函數(shù)來提高其優(yōu)化性能,但由于不同的混沌因子在處理不同測試函數(shù)時發(fā)揮的作用不同,因此整體優(yōu)化結(jié)果有待加強。高猛等[6]利用Circle 映射對鵜鶘種群進行初始化,利用改進鵜鶘優(yōu)化算法,建立極限梯度提升模型以提高電機故障診斷的準確度,雖然增加了初始種群的多樣性,但仍無法解決鵜鶘算法后期易陷入局部最優(yōu)的現(xiàn)象。周建新等[7]首先引入自適應權(quán)重提高算法尋優(yōu)精度,然后結(jié)合正余弦算法提升算法性能,同時增加擾動因子防止種群陷入局部最優(yōu),并將改進鵜鶘優(yōu)化算法與長短神經(jīng)以及網(wǎng)絡(luò)相結(jié)合,最后提升了鋼坯溫度的預測精度,但該算法的測試函數(shù)較少且精度有待進一步提升。
這些改進雖然在一定程度上提高了算法的性能,但在后期容易陷入局部最優(yōu),改進效果不夠顯著。為了進一步提高POA 的性能并檢驗該算法在實際應用中的效果,本文提出了一種基于混合策略改進鵜鶘優(yōu)化算法。首先,在種群初始化階段使用折射反向?qū)W習策略,擴大搜索空間,增加種群的多樣性;其次,將正余弦優(yōu)化算法運用到改進算法中,利用正余弦特性增強POA 算法全局與局部的搜索能力;然后,利用Levy 飛行策略,對鵜鶘個體進行變異,提高算法跳出局部最優(yōu)的能力;最后,使用t分布變異提高后期收斂速度和精度。通過12 個不同的基準函數(shù)進行算法性能測試,比較IPOA 與已有的5 種經(jīng)典算法海鷗優(yōu)化算法(seagull optimization algorithm,SOA)、黑猩猩優(yōu)化算法(chimp optimization algorithm,ChOA)、鯨魚優(yōu)化算法(whale optimization algorithm,WOA)、蛇群優(yōu)化算法(snake optimizer,SO)和基本鵜鶘優(yōu)化算法的仿真結(jié)果。結(jié)果表明,IPOA 算法具有更好的優(yōu)化精度和更快的收斂速度。
1 改進鵜鶘搜索算法
1.1 鵜鶘優(yōu)化算法
POA 由勘察階段和開采階段組成,流程如下:
首先鵜鶘種群根據(jù)問題的下界和上界利用方程隨機初始化。
式中:xi,j為第i個候選解指定的第j個變量的值;N為種群成員個數(shù);m為求解問題的維度;lj為問題變量的第j個下界,uj為第j個上界,rand為區(qū)間[0,1]內(nèi)的隨機數(shù)。
在提出的POA 中,每個種群成員是鵜鶘,是給定問題的一個候選解。完成初始化后,鵜鶘進入勘察階段。在這一階段,在解空間內(nèi)隨機生成獵物的位置,鵜鶘識別獵物的位置,然后向這個識別的區(qū)域移動,其表達式如下:
勘探階段完成后,鵜鶘進入開采階段。鵜鶘到達水面后,在水面上扇動翅膀?qū)Ⅳ~體向上移動,在其咽喉囊中收集獵物。在這一階段,算法考察鵜鶘位置鄰域內(nèi)的點,向狩獵區(qū)更好的點收斂,其表達式如下:
在第一階段和第二階段更新完所有種群成員后,基于種群的新狀態(tài)和目標函數(shù)的值,更新到目前為止最好的候選解。算法進入下一次迭代,重復上述提出的POA 步驟,直到完全執(zhí)行結(jié)束。最后,將算法迭代過程中得到的最佳候選解作為給定問題的準最優(yōu)解。
1.2 改進鵜鶘搜索算法
1.2.1 折射反向?qū)W習機制策略
在種群初始化階段,初始種群的質(zhì)量對算法后期的求解過程及得出的結(jié)果均具有一定的影響。采用反向?qū)W習機制初始化種群個體的位置,可以使初始解在搜索空間中的分布更均勻。
反向?qū)W習(opposition-based learning,OBL)是由Tizhoosh H R[8]提出的一種擴大種群搜索范圍的優(yōu)化策略,其核心思想是其通過計算當前解的反向解,并選擇較優(yōu)解進行迭代,來找出給定問題的更優(yōu)解,有利于提高算法的尋優(yōu)效果。但在后期容易出現(xiàn)反向解落入局部最優(yōu)區(qū)域的現(xiàn)象。結(jié)合光的折射原理而提出的折射反向?qū)W習(refracted oppositionbased learning,ROBL)[9]可以在不同程度上改善算法性能,擴大搜索空間。其原理如圖1 所示。

圖1 折射反向?qū)W習機制
在圖1 中,以x軸為分界線,x軸上的解的搜索區(qū)間為[a,b],y軸表示法線,x軸上方有一光點從一種介質(zhì)射入另一種介質(zhì),l為入射光線,l*為折射光線,α和β分別為入射角和折射角,a、b分布在點O兩端。根據(jù)圖中各參數(shù)的幾何關(guān)系,可得折射率n的表達式為
令k=l/l?,代入式(4)并將其拓展到多維空間可得折射方向解:
式中:xi,j代表該群體中第i只鵜鶘在j維上的位置;為xi,j的折射反向解;aj和bj分別表示搜索空間在j維上的下界和上界;k的大小決定了鵜鶘種群的位置,通過調(diào)整可以使種群向全局最優(yōu)的位置靠近。
1.2.2 融合正弦余弦優(yōu)化算法策略
正余弦算法(sine cosine algorithm,SCA)是2016 年由澳大利亞學者Mirjalili S[10]提出的基于數(shù)學性質(zhì)的變化的新型元啟發(fā)式優(yōu)化算法。該算法通過迭代利用正弦余弦的變化對算法進行全局搜索和局部搜索,其個體的位置為
式中:t為當前迭代次數(shù);Tmax為最大迭代次數(shù)。
正弦余弦優(yōu)化算法[11]在迭代的過程中,通過不斷更新參數(shù)r1,實現(xiàn)個體在參數(shù)r4的控制下選擇正弦函數(shù)或余弦函數(shù)更新位置信息,從而更好地平衡算法的全局搜索能力與局部開發(fā)能力,當?shù)阶畲蟠螖?shù)時,保存?zhèn)€體最優(yōu)位置。
1.2.3 Levy 飛行機制策略
Levy 飛行[12]是一種非常有效地提供隨機因子的數(shù)學方法,用來模擬自然界中的動物在不確定的環(huán)境中找尋食物的過程,并且服從萊維分布,是一種短距離探索與偶爾長距離行走相間的飛行方式[13]。
在標準的POA 開采階段,在鵜鶘附近進行獵物的局部搜索時,隨著迭代次數(shù)的增加,在最優(yōu)解附近鄰域內(nèi)的鵜鶘容易陷入局部最優(yōu)。為此,本文在鵜鶘在開采階段引入Levy 飛行機制,對鵜鶘個體進行變異,擴大搜索半徑,增加種群多樣性,避免陷入局部最優(yōu),增強全局探索能力。在開采階段,改進后的鵜鶘位置更新方式如下:
式中:Γ為標準Gamma 函數(shù);β為[0,2]內(nèi)隨機數(shù);r5為[0,1]內(nèi)隨機數(shù);參數(shù)u、v為服從式(10)所示的正態(tài)分布隨機數(shù)。
使用Levy 飛行機制的位置更新方程為
1.2.4 基于迭代次數(shù)的t分布變異
t分布又稱為學生t分 布(student’st-distribution)[14],其含有的參數(shù)自由度n影響著函數(shù)曲線的形態(tài),自由度n取值越小,曲線中部越平緩。n=1 時,t(n=1)→C(0,1);n=∞ 時,t(n=∞)→N(0,1)。其中,C(0,1) 為柯西分布,N(0,1)為高斯分布,即柯西分布和高斯分布是t分布自由度取1 和 ∞時的兩個邊界特例,其函數(shù)分布如圖2 所示。
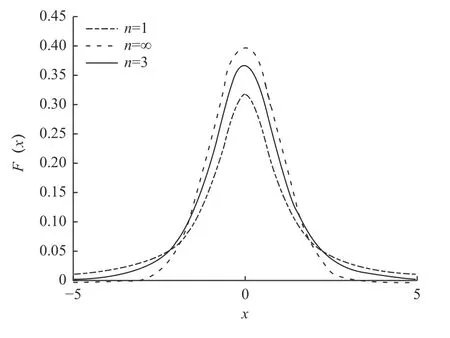
圖2 t 分布函數(shù)分布圖
為進一步提高算法的尋優(yōu)性能,防止其在迭代后期陷入局部最優(yōu),本文對鵜鶘個體的位置進行自適應t分布變異,定義如下:
自適應t分布變異[15]以算法的迭代次數(shù)作為t分布的自由度參數(shù)。在算法運行前期,由于迭代次數(shù)較小,自由度n取值較小,曲線中部比較平緩,此時算法具有較好的全局探索能力;隨著迭代次數(shù)的增加,自由度n逐漸增大,曲線中部凸起,此時算法具有較好的局部開發(fā)能力;當自由度無窮大時,t分布變異蛻變?yōu)闃藴收龖B(tài)分布。因此,t分布變異結(jié)合了柯西分布和高斯分布的特點和優(yōu)勢,同時具有全局探索能力和局部開發(fā)能力。
1.2.5 混合策略改進鵜鶘優(yōu)化算法步驟
步驟一:設(shè)置算法參數(shù)和種群數(shù)量。
步驟二:反向折射學習機制初始化種群。
步驟三:計算適應度值,在搜索空間中隨機生成獵物。
步驟四:根據(jù)式(6)更新鵜鶘位置。
步驟五:根據(jù)式(11)更新鵜鶘位置。
步驟六:對最優(yōu)個體按照式(12)進行t分布變異。
步驟七:判斷是否達到算法結(jié)束條件,若未達到,則跳轉(zhuǎn)步驟三。
步驟八:記錄最優(yōu)結(jié)果,結(jié)束運行。
改進鵜鶘優(yōu)化算法流程圖如圖3 所示。

圖3 改進鵜鶘優(yōu)化算法流程圖
2 仿真實驗和結(jié)果分析
2.1 不同算法比較
為了測試改進鵜鶘優(yōu)化算法(IPOA)的整體性能,通過Matlab 對原始POA 和ChOA、WOA、SO、SOA 五種新興的算法與IPOA 進行對比,利用12個基準函數(shù)進行測試。
本文實驗均在相同環(huán)境下進行:64 位的Windows 11 系統(tǒng),8G 內(nèi)存,AMD Ryzen 7 6800H處理器,Matlab R2018b 仿真軟件。基準測試函數(shù)見表1,其中F1~F6 為單峰函數(shù),F(xiàn)7~F10 為多峰函數(shù),F(xiàn)11 和F12 為固定維多峰函數(shù)。為了降低實驗偶然性,仿真程序中設(shè)置種群大小為30,最大迭代次數(shù)為500。算法其他參數(shù)設(shè)置見表2。
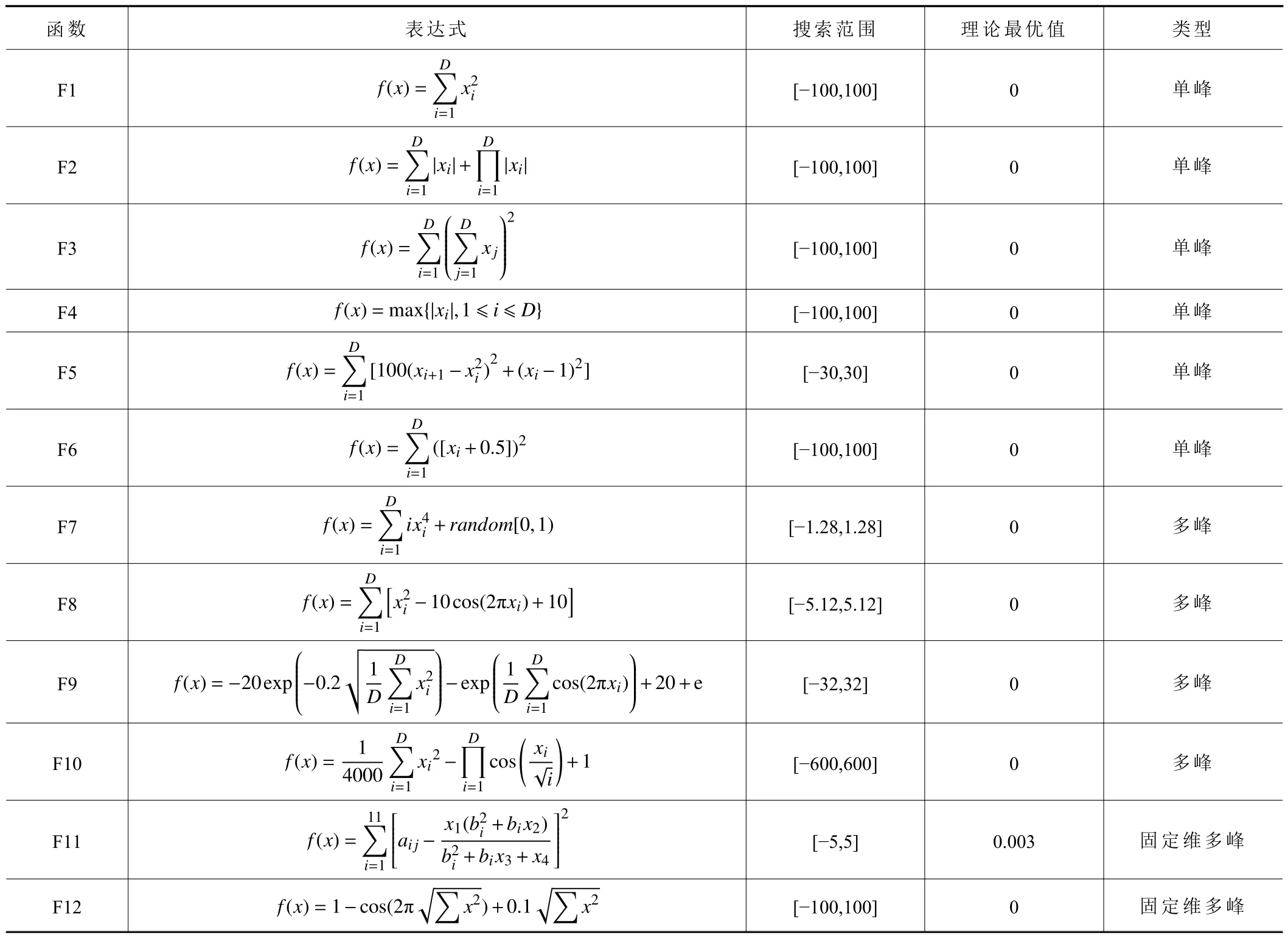
表1 12 個基準測試函數(shù)
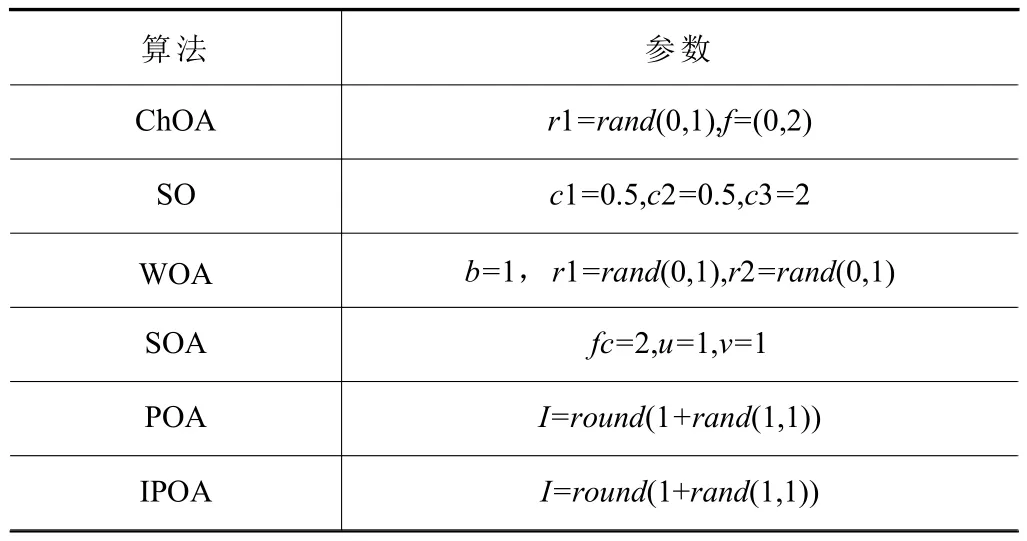
表2 算法的參數(shù)設(shè)置
表3 給出了五種新型算法和IPOA 算法分別在12 個測試函數(shù)上運行30 次的結(jié)果,其中單峰函數(shù)的優(yōu)化結(jié)果表明IPOA 具有較強的開發(fā)能力以逼近最優(yōu)解,而多峰函數(shù)的優(yōu)化結(jié)果表明IPOA 具有較強的在搜索空間中搜索最優(yōu)區(qū)域的能力。從表3 可以看出,IPOA 算法在F1、F2、F3、F4、F8、F10、F12 的7 個測試函數(shù)上均能收斂到理論最優(yōu)值,且標準差均為0,在求解質(zhì)量、精度、穩(wěn)定性、魯棒性上都優(yōu)于其他算法;對于F5、F6、F7、F9、F11這5 個函數(shù),雖然沒有收斂到理論最優(yōu)值,但在穩(wěn)定性上,IPOA 算法在很大程度上優(yōu)于其他算法,說明其具有跳出局部最優(yōu)的能力。相比于POA 算法,IPOA 在除F5 之外的11 個基準函數(shù)上的標準差與平均值均獲得了顯著的優(yōu)勢,進一步證明了改進算法策略的有效性。

表3 測試函數(shù)結(jié)果
為了更直觀地反映出IPOA 算法的性能,本文給出算法在測試函數(shù)上的收斂曲線如圖4 所示,可以看出,對于單峰函數(shù),IPOA 算法在F1~F4 上的收斂速度和精度明顯優(yōu)于其他算法,在迭代次數(shù)不到300 時,IPOA 算法就已經(jīng)找到理論最優(yōu)值,這主要是因為IPOA 在種群初始化時利用反向折射學習擴大種群搜索范圍,且在全局搜索階段利用正余弦算法,更好地平衡了算法的全局搜索與局部開發(fā)能力,最后使用Levy 飛行機制擺脫局部最優(yōu)的約束,加快算法的收斂速度與精度。對固定維多峰函數(shù)F12,其他算法均陷入了局部最優(yōu),而IPOA 的優(yōu)化效果最好且最優(yōu)值為0,說明改進策略提高了基本算法跳出局部最優(yōu)的能力,證明了改進算法的可行性。

圖4 測試函數(shù)收斂曲線圖
2.2 不同改進策略性能分析
為對比不同改進策略的有效性以及對POA 性能提升的影響,將POA 與引入反向折射學習機制的鵜鶘優(yōu)化算法(RPOA)、融合正余弦算法的鵜鶘優(yōu)化算法(SCPOA)、融合Levy 飛行機制的鵜鶘優(yōu)化算法(LPOA)、引入t分布變異的鵜鶘優(yōu)化算法(TPOA)和POA 在12 種基準測試函數(shù)上進行對比,驗證各自策略的有效性和混合策略改進POA 的優(yōu)勢。算法的實驗參數(shù)與2.1 節(jié)一致,實驗結(jié)果見表4。
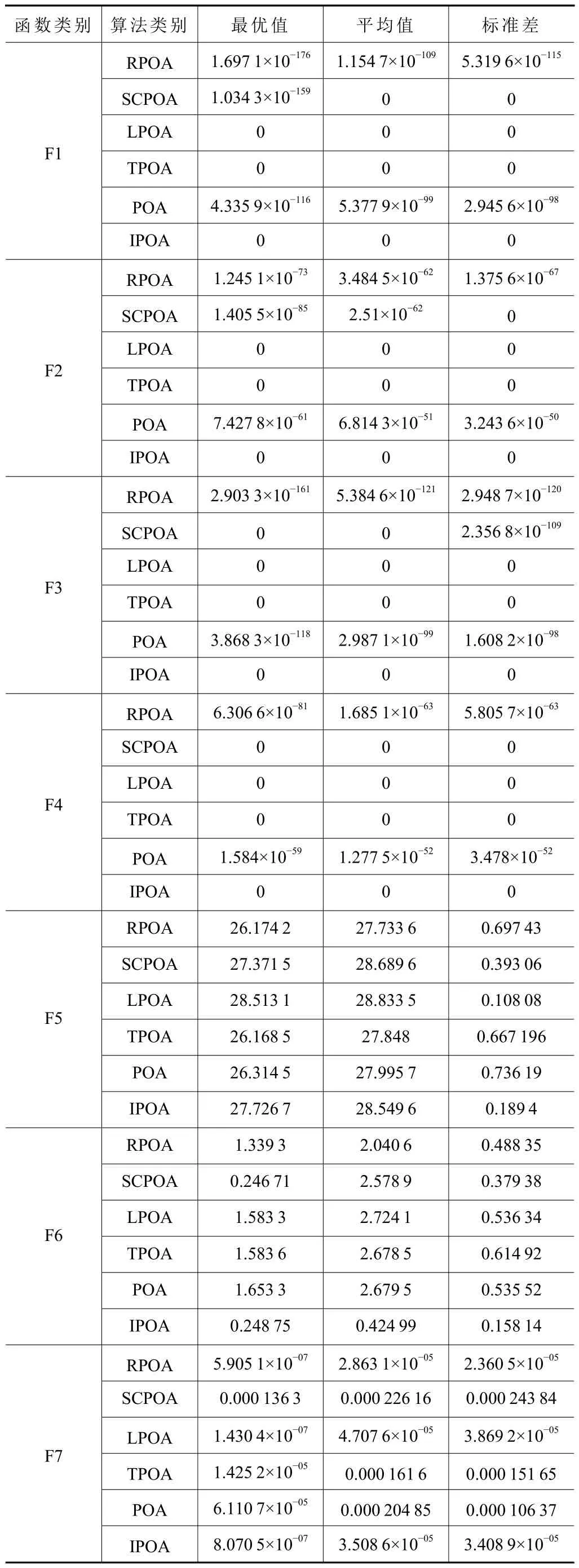
表4 不同改進策略算法的尋優(yōu)結(jié)果對比
由表4 中數(shù)據(jù)可知,LPOA 和TPOA 在函數(shù)的尋優(yōu)過程中起決定性作用,RPOA 和SCPOA 對函數(shù)的尋優(yōu)也有一定的作用。對于單峰函數(shù),在對F1~F4 尋優(yōu)時,LPOA 和TPOA 均能找到理論最優(yōu)值0;對于多峰函數(shù),LPOA 和TPOA 在F7、F9、F11 未能找到理論最優(yōu)值,但與POA 相比,尋優(yōu)精度有一定的提升,從而證明了這兩種策略的有效性。在函數(shù)F1~F7 的尋優(yōu)上,RPOA 的尋優(yōu)性能不是很明顯,但相比于原始POA 還是有一定程度的提高,比如在對F1 尋優(yōu)時,比POA 高了60 個數(shù)量級。SCPOA 在六個函數(shù)上的標準差都為0,且在F5、F11 尋優(yōu)過程中各種改進策略均未找到最優(yōu)值,但SCPOA 尋優(yōu)貢獻比其他策略大,說明其相較于POA 具有較強的穩(wěn)定性和尋優(yōu)精度。通過上述數(shù)據(jù)的比較,四種策略在對基礎(chǔ)函數(shù)的求解上,每個改進策略對于算法尋優(yōu)性能的提升均有一定效果,驗證了各個策略的有效性。而綜合了四種策略的IPOA 相較于結(jié)合一種策略的POA 具有更高的收斂性和精度,證明了混合策略的有效性。
3 IPOA 算法求解壓力容器問題
為進一步驗證算法性能,評估IPOA 在實際應用中的有效性,本文將IPOA 算法應用于壓力容器結(jié)構(gòu)設(shè)計中。壓力容器是一種用于石油化工、能源工業(yè)、科研和軍事工業(yè)等領(lǐng)域,承載一定壓力的設(shè)備。壓力容器是一個最小化問題,其設(shè)計目標是使其在耐壓前提下,設(shè)計制作的總成本最小,其結(jié)構(gòu)設(shè)計如圖5 所示,容器的兩端有蓋子封頂,L為圓柱體部分的橫截面長度,R為內(nèi)部半徑,Ts為圓柱體部分壁厚,Th為頭部半圓的壁厚,L、R、Ts和Th為四個設(shè)計變量,問題的數(shù)學模型表示如下。

圖5 壓力容器問題示意圖
分別用基本POA 算法和IPOA 算法對該問題進行求解,得到的結(jié)果見表5,可以看出,IPOA 在穩(wěn)定性和尋找最優(yōu)解上都具有顯著優(yōu)勢。從壓力容器收斂圖6 可以直觀地看出,IPOA 在100 代時已經(jīng)開始收斂于最優(yōu)值,但POA 接近250 代時才找到最優(yōu)值,在收斂速度上IPOA 明顯強于POA,所以IPOA 更能夠有效地求解工程應用問題。

表5 壓力容器設(shè)計問題求解結(jié)果

圖6 壓力容器設(shè)計求解收斂曲線圖
4 結(jié)語
本文針對基本POA 算法的不足,通過引入折射反向?qū)W習機制、融合正余弦算法、Levy 飛行機制和基于迭代次數(shù)的t分布變異,提出了一種改進的IPOA 算法。首先利用反向折射學習得到初始種群,利用正余弦函數(shù)的震蕩特性擴大搜索范圍;然后在開采階段引入Levy 飛行機制更新種群位置,避免算法陷入局部最優(yōu);最后利用以迭代次數(shù)作為自變量的t分布變異加快算法的收斂速度,提高算法尋優(yōu)精度。將IPOA 與其他五種算法通過12 個經(jīng)典測試函數(shù)進行檢驗比較,并通過壓力容器優(yōu)化設(shè)計問題進一步驗證。結(jié)果表明,改進鵜鶘優(yōu)化算法在全局尋優(yōu)以及局部開發(fā)方面具有更優(yōu)表現(xiàn),驗證了改進策略的有效性。
猜你喜歡
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
教學考試(高考化學)(2021年2期)2021-05-30 06:15:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
中學生數(shù)理化(高中版.高考數(shù)學)(2021年12期)2021-03-08 01:28:50
中學生數(shù)理化·高一版(2020年3期)2020-04-21 08:03:20
中學生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
數(shù)學大世界(2018年1期)2018-04-12 05:39:14