多參數(shù)優(yōu)化MPC的自動(dòng)駕駛軌跡跟蹤控制
2024-03-19 11:47:06李學(xué)慧張俊友
關(guān)鍵詞:優(yōu)化
李學(xué)慧,蘇 振,張俊友
(山東科技大學(xué)交通學(xué)院,山東 青島 266590)
0 引言
軌跡跟蹤控制是實(shí)現(xiàn)車輛自動(dòng)駕駛的關(guān)鍵技術(shù)之一[1],其原理是將車輛當(dāng)前的實(shí)際位姿與目標(biāo)位姿進(jìn)行比較,并轉(zhuǎn)換到車身坐標(biāo)系,得到橫向誤差,通過最小化橫向誤差計(jì)算得到前輪轉(zhuǎn)角,并作用于執(zhí)行機(jī)構(gòu),使車輛沿著目標(biāo)路徑行駛[2]。
在軌跡跟蹤控制中使用較多的控制算法有:PID控制、模型預(yù)測(cè)控制、預(yù)瞄控制和線性二次型調(diào)節(jié)器等[3]。模型預(yù)測(cè)控制能夠結(jié)合被控系統(tǒng)的動(dòng)態(tài)模型與系統(tǒng)當(dāng)前的狀態(tài),預(yù)測(cè)系統(tǒng)未來的輸出,通過求解含約束條件的最優(yōu)控制問題,獲得系統(tǒng)的最優(yōu)控制輸入,并且具有處理多約束優(yōu)化問題的能力[4],更適用于復(fù)雜多變的自動(dòng)駕駛應(yīng)用場(chǎng)景。車輛在高速、低附著路面和大曲率路徑工況下,傳統(tǒng)MPC算法處理能力有限,會(huì)出現(xiàn)跟蹤誤差大、穩(wěn)定性差等現(xiàn)象。近年來,通過改進(jìn)MPC算法提高自動(dòng)駕駛軌跡跟蹤精度和穩(wěn)定性成為國(guó)內(nèi)外研究熱點(diǎn)問題[5]。
改進(jìn)MPC算法主要有參數(shù)優(yōu)化和與其他算法相結(jié)合2種方式。通過參數(shù)優(yōu)化改進(jìn)的MPC算法可以不斷調(diào)整預(yù)測(cè)時(shí)域、控制時(shí)域和調(diào)整權(quán)重矩陣,從而獲得相對(duì)最優(yōu)解,更好地作用于被控系統(tǒng)。李培慶等[6]使用權(quán)重矩陣自適應(yīng)的MPC控制器,目標(biāo)函數(shù)的權(quán)重矩陣根據(jù)參考路徑的曲率變化進(jìn)行優(yōu)化調(diào)節(jié),提高了軌跡跟蹤精度和穩(wěn)定性,但是沒有針對(duì)不同速度工況進(jìn)行優(yōu)化。李耀華等[7]建立了一種智能車軌跡跟蹤性能綜合評(píng)價(jià)指標(biāo),制定了不同車速下的預(yù)測(cè)時(shí)域和控制時(shí)域參數(shù)調(diào)節(jié)策略,獲取最優(yōu)預(yù)測(cè)時(shí)域與控制時(shí)域,結(jié)合規(guī)劃層和控制層解決過度避障問題,減小跟蹤誤差。王銀等[8]使用自適應(yīng)軌跡跟蹤控制策略,預(yù)測(cè)時(shí)域根據(jù)車速變化進(jìn)行自適應(yīng)優(yōu)化調(diào)節(jié),提高了低附著系數(shù)路面工況下車輛變速行駛時(shí)的軌跡跟蹤精度和穩(wěn)定性。預(yù)測(cè)時(shí)域的產(chǎn)生是通過三次多項(xiàng)式擬合4組數(shù)據(jù)得到,由于數(shù)據(jù)較少,不能得到最優(yōu)預(yù)測(cè)時(shí)域。Lin等[9]根據(jù)橫向速度和縱向速度變化,通過模糊控制調(diào)節(jié)預(yù)測(cè)時(shí)域和控制時(shí)域參數(shù),并利用余弦相似度觸發(fā)狀態(tài)矩陣更新機(jī)制,驗(yàn)證了該策略在變速工況下具有良好的適應(yīng)性和跟蹤精度。Wang等[10]使用Mamdani模糊自適應(yīng)算法對(duì)MPC控制器權(quán)重矩陣進(jìn)行優(yōu)化調(diào)節(jié),與傳統(tǒng)MPC算法相比,在跟蹤精度和轉(zhuǎn)向平順性方面具有更好的跟蹤性能。李韶華等[11]根據(jù)橫向誤差和橫擺角誤差使用Takagi-Sugeno模糊變權(quán)重MPC控制算法,在線優(yōu)化MPC權(quán)重矩陣,測(cè)試了該算法在不同速度下的跟蹤效果,但是沒有根據(jù)不同速度對(duì)時(shí)域進(jìn)行優(yōu)化。
在不同速度工況下,僅調(diào)節(jié)模型預(yù)測(cè)控制器的權(quán)重矩陣,能夠提高軌跡跟蹤精度,但受時(shí)域的限制,優(yōu)化幅度有限,如果在此基礎(chǔ)上同時(shí)調(diào)節(jié)時(shí)域,會(huì)進(jìn)一步提高跟蹤精度。根據(jù)車輛行駛速度、橫向位置誤差和橫擺角誤差作為模糊輸入,利用模糊控制對(duì)MPC控制器的預(yù)測(cè)時(shí)域、控制時(shí)域和權(quán)重矩陣等多個(gè)參數(shù)進(jìn)行實(shí)時(shí)優(yōu)化,通過權(quán)重矩陣優(yōu)化提高跟蹤精度,同時(shí)進(jìn)行時(shí)域優(yōu)化,進(jìn)一步提高車輛在不同速度工況下的適應(yīng)性。
1 無人車輛系統(tǒng)建模
汽車是一個(gè)復(fù)雜的非線性多約束系統(tǒng),在研究車輛運(yùn)動(dòng)控制相關(guān)的問題時(shí),為了降低系統(tǒng)的復(fù)雜程度,提高算法的運(yùn)算效率,在滿足車輛自身的結(jié)構(gòu)約束和控制算法需求的前提下,一般會(huì)忽略部分非研究重點(diǎn)的因素[12],本文中假設(shè):忽略車輛的垂向運(yùn)動(dòng),輪胎受力的橫縱向耦合關(guān)系,載荷的左右轉(zhuǎn)移以及橫縱向空氣動(dòng)力學(xué)效應(yīng);質(zhì)心側(cè)偏角和輪胎滑移率較小;車輛各個(gè)輪胎受力均處于線性區(qū)域。基于上述假設(shè),將車輛簡(jiǎn)化為圖1所示的3自由度動(dòng)力學(xué)模型。
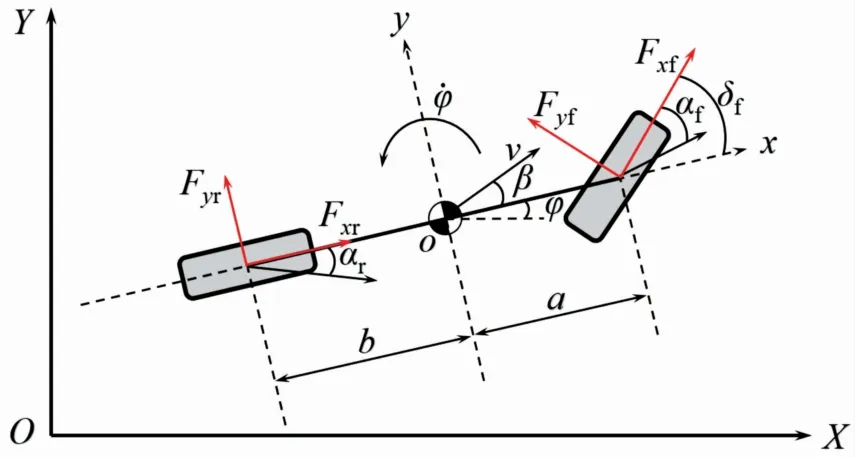
圖1 車輛3自由度模型示意圖
圖1中,a和b分別為車輛質(zhì)心與前軸和后軸的距離;v表示車輛質(zhì)心速度;φ表示車輛橫擺角;˙φ表示車輛橫擺角速度;δf表示車輛的前輪轉(zhuǎn)角;β表示質(zhì)心側(cè)偏角;x和y為車身坐標(biāo)系;X和Y表示大地坐標(biāo)系;αf和αr分別為前后輪胎側(cè)偏角;Fyf表示前輪胎側(cè)向力的合力;Fyr表示后輪胎側(cè)向力的合力;Fxf表示前輪胎縱向力的合力;Fxr表示后輪胎縱向力的合力。
簡(jiǎn)化后的車輛動(dòng)力學(xué)方程如下:
式中:m表示車輛質(zhì)量;Iz表示車輛的轉(zhuǎn)動(dòng)慣量;Clf和Clr分別表示車輛前后輪胎的縱向剛度;Ccf和Ccr分別表示車輛前后輪的側(cè)偏剛度;sf和sr分別表示前后輪滑移率。
由車身坐標(biāo)系和大地坐標(biāo)系轉(zhuǎn)換得到:
此時(shí)可以將被控系統(tǒng)描述為如下的狀態(tài)空間表達(dá)式:
2 軌跡跟蹤控制器的設(shè)計(jì)
模型預(yù)測(cè)控制屬于過程控制類策略,在每一個(gè)控制周期內(nèi),對(duì)有限時(shí)域內(nèi)開環(huán)控制問題進(jìn)行優(yōu)化求解,并不斷地滾動(dòng)優(yōu)化實(shí)現(xiàn)反饋控制。將車輛非線性動(dòng)力學(xué)模型線性化,然后離散化,并加入約束條件,轉(zhuǎn)化為二次規(guī)劃問題求解。
2.1 非線性系統(tǒng)線性化與離散化
對(duì)系統(tǒng)的狀態(tài)方程=f(ξ,u)在參考值ξ=ξ0,u=u0處利用泰勒展開式,對(duì)車輛非線性動(dòng)力學(xué)模型線性化處理后,得到線性時(shí)變方程:
再利用向前歐拉法進(jìn)行離散化后可得:
式中:Ak,t=I+TAt,0,Bk,t=TBt,0,Dk,t=TDt,0,I為單位矩陣,T為采樣周期。
令u(k)=u(k-1)+Δu(k),Δu(k)為控制增量,定義新的狀態(tài)變量ξ~(k)=[ξ(k),u(k-1)]T,將式(5)轉(zhuǎn)化為以控制增量為輸入的狀態(tài)方程并生成新的狀態(tài)空間表達(dá)式:
自動(dòng)駕駛軌跡跟蹤控制的目標(biāo)是盡量減小車輛實(shí)際行駛軌跡與參考軌跡的誤差,使車輛平穩(wěn)行駛。所以目標(biāo)函數(shù)既要能表征跟蹤精度,又要能表征跟蹤穩(wěn)定性[13]。采用控制增量作為狀態(tài)量,并加入松弛因子ε,目標(biāo)函數(shù)如式(7)所示。
式中:η(·|k)表示k時(shí)刻之后一段時(shí)間內(nèi)系統(tǒng)的輸出;ηref(·|k)是η(·|k)的參考值;Δu為前輪轉(zhuǎn)角增量;ρ為權(quán)重系數(shù);ε為松弛因子;Np為預(yù)測(cè)時(shí)域,Nc為控制時(shí)域;Q和R為權(quán)重矩陣。表達(dá)式如下:
在目標(biāo)函數(shù)中還需計(jì)算控制系統(tǒng)未來時(shí)刻的輸出,系統(tǒng)的未來時(shí)刻輸出形式如下:
2.2 轉(zhuǎn)化為二次規(guī)劃問題求解
將預(yù)測(cè)模型和目標(biāo)函數(shù)相結(jié)合,構(gòu)建軌跡跟蹤二次規(guī)劃問題并設(shè)置約束條件,利用Matlab中的求解器quadprog進(jìn)行求解[14]。
式中:x表示返回值向量;H表示二次目標(biāo)矩陣,是實(shí)對(duì)稱矩陣;f表示線性目標(biāo)向量;E=Ψkξ(k)+ΓkΦ-Yref(k),Yref(k)是Y(k)的參考值。對(duì)式(13)進(jìn)行求解,獲得控制輸入增量序列Δ=將該序列中第一個(gè)元素取出,當(dāng)前時(shí)刻控制量與該元素相加后作用于被控系統(tǒng),即u(k+1)=u(k)+Δ。
在設(shè)計(jì)模型預(yù)測(cè)控制器時(shí),需要對(duì)輸出量、控制量和控制量增量進(jìn)行約束。輸出量根據(jù)車輛參考軌跡設(shè)置;對(duì)于控制量和控制量增量即車輛前輪轉(zhuǎn)角和前輪轉(zhuǎn)角增量約束可設(shè)置為:
2.3 優(yōu)化方案
將車輛行駛速度、橫向位置誤差和橫擺角誤差作為模糊輸入,利用模糊控制對(duì)MPC控制器多個(gè)參數(shù)進(jìn)行優(yōu)化,在速度不變時(shí)通過調(diào)節(jié)權(quán)重矩陣提高軌跡跟蹤精度,在不同速度工況下通過調(diào)節(jié)預(yù)測(cè)時(shí)域和控制時(shí)域?qū)刂破鬟M(jìn)一步優(yōu)化,實(shí)現(xiàn)MPC控制器多參數(shù)調(diào)節(jié),軌跡跟蹤控制器架構(gòu)如圖2所示。
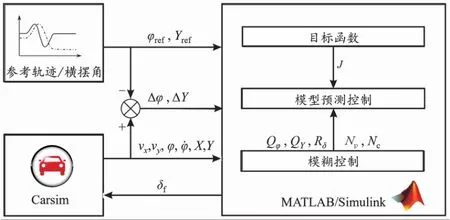
圖2 軌跡跟蹤控制器架構(gòu)
2.3.1 權(quán)重矩陣優(yōu)化
在同一速度工況下采用橫向誤差ΔY和橫擺角誤差Δφ作為Mamdani模糊控制[10]輸入,輸出權(quán)重矩陣調(diào)節(jié)系數(shù)rφ、rY和rR,通過式(15)計(jì)算改變權(quán)重矩陣Q和R,式(15)中設(shè)置初始值為:Qφ0=200 000,QY0=90 000,Rδ0=500 000。Mamdani模糊控制輸入和輸出變量的隸屬度如圖3和圖4所示,Δφ的論域設(shè)置為[-15,15],ΔY的論域設(shè)置為[-6,6],rφ、rY和rR的論域設(shè)置為[0,1]。

圖3 輸入變量隸屬度

圖4 輸出變量隸屬度
模糊規(guī)則設(shè)置如表1—表3所示,模糊輸入輸出三維圖如圖5所示。
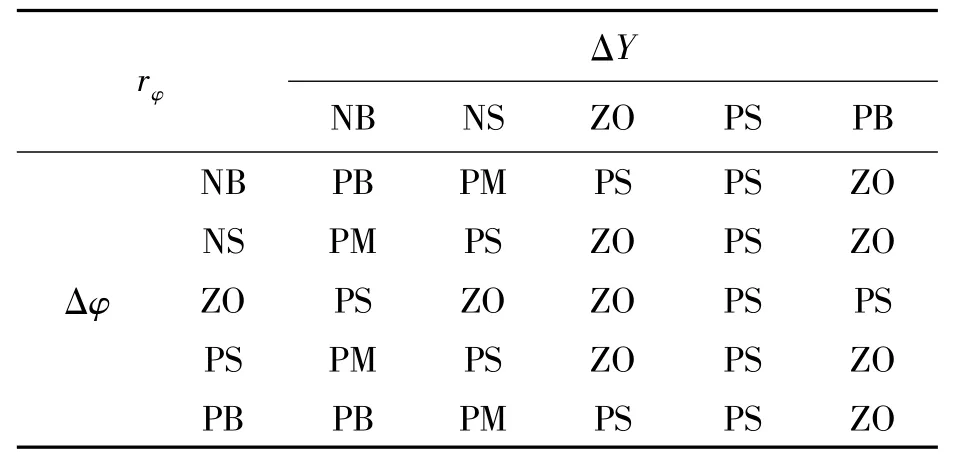
表1 rφ模糊規(guī)則

表2 rY模糊規(guī)則
表3 rR模糊規(guī)則
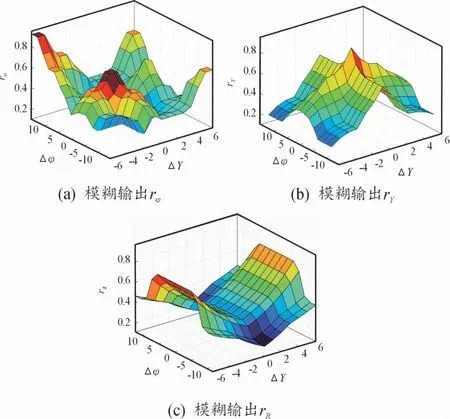
圖5 Mamdani模糊輸入輸出三維圖
2.3.2 時(shí)域優(yōu)化
MPC控制器中的預(yù)測(cè)時(shí)域與控制時(shí)域?qū)壽E跟蹤效果的影響如圖6所示。若目標(biāo)函數(shù)中其他參數(shù)不變,當(dāng)預(yù)測(cè)時(shí)域Np過大時(shí),控制器可以預(yù)測(cè)更遠(yuǎn)的距離,會(huì)考慮到更遠(yuǎn)位置處的偏差,從而削弱對(duì)車輛當(dāng)前位置偏差的控制,導(dǎo)致過早轉(zhuǎn)向,出現(xiàn)距離車輛當(dāng)前位置較近處的跟蹤誤差較大的現(xiàn)象;當(dāng)預(yù)測(cè)時(shí)域Np過小時(shí),預(yù)測(cè)的未來車輛狀態(tài)信息過少,車輛無法及時(shí)轉(zhuǎn)向,容易失控。當(dāng)控制時(shí)域Nc增大時(shí),有利于控制靈敏度和精度,但會(huì)降低系統(tǒng)穩(wěn)定性和實(shí)時(shí)性;當(dāng)控制時(shí)域Nc減小時(shí),情況則相反。

圖6 預(yù)測(cè)時(shí)域和控制時(shí)域?qū)壽E跟蹤的影響
為了使車輛在不同速度工況下控制器具有最優(yōu)時(shí)域參數(shù),設(shè)置預(yù)測(cè)時(shí)域初始值Np0,控制時(shí)域初始值Nc0,通過Takagi-Sugeno模糊控制獲得系數(shù)rNp和rNc,使用式(16)計(jì)算Np和Nc。因?yàn)橄禂?shù)rNp和rNc的論域設(shè)置為[0,1],Np和Nc的值不超過Np0和Nc0,所以Np0和Nc0的設(shè)置不能太小,結(jié)合相關(guān)文獻(xiàn),并反復(fù)仿真實(shí)驗(yàn)后選取Np0=33、Nc0=16。
Takagi-Sugeno模糊控制的輸入為速度v,輸出為系數(shù)rNp和rNc,速度v論域設(shè)置為[0,12],速度v論域與真實(shí)車速v*的數(shù)量關(guān)系為v=v*/10,v*單位為km/h,速度v隸屬度如圖7所示。T-S模糊規(guī)則如表4所示,時(shí)域調(diào)節(jié)模糊規(guī)則二維關(guān)系如圖8所示。
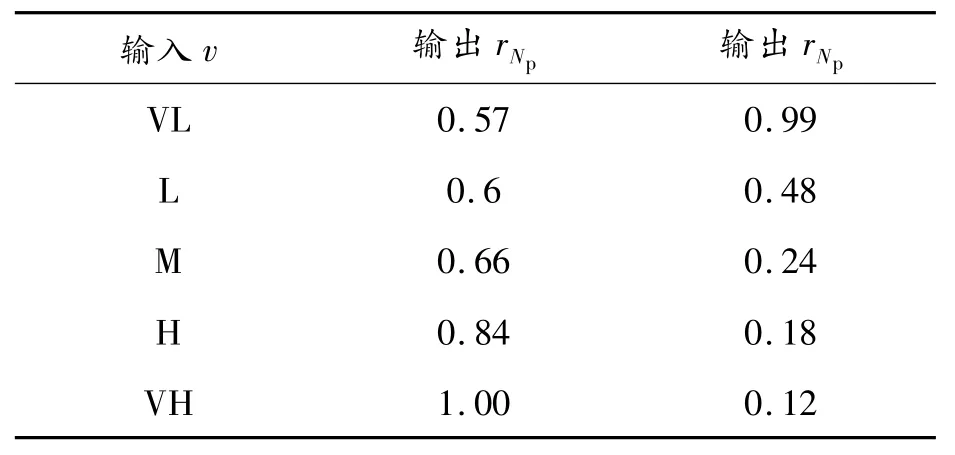
表4 時(shí)域調(diào)節(jié)模糊規(guī)則
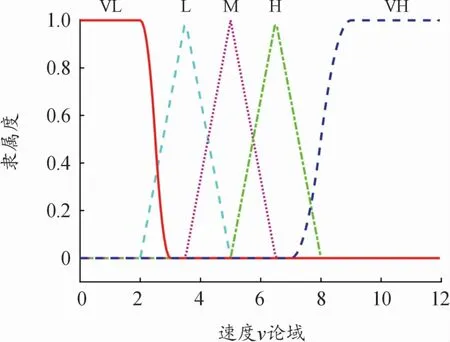
圖7 速度隸屬度

圖8 Takagi-Sugeno模糊輸出二維圖
3 仿真驗(yàn)證
在自動(dòng)駕駛車輛行駛過程中,需要將可行性、安全性和穩(wěn)定性作為優(yōu)化目標(biāo)。可行性表現(xiàn)為車輛前輪轉(zhuǎn)角控制在規(guī)定范圍,安全性表現(xiàn)為車輛行駛過程中軌跡跟蹤精度,穩(wěn)定性表現(xiàn)為車輛行駛過程中橫擺角誤差的變化。為了檢驗(yàn)改進(jìn)的MPC控制器的跟蹤效果,使用Matlab和Carsim進(jìn)行軌跡跟蹤控制聯(lián)合仿真,在Matlab中搭建MPC控制器,輸出控制量作用于Carsim,Carsim將車輛實(shí)時(shí)狀態(tài)變量輸出作用于Matlab。
3.1 工況選擇
參考軌跡選擇雙移線方程,路徑設(shè)置如下:
式中:Yref為橫向參考坐標(biāo);φref為參考橫擺角;Xref為參考縱向坐標(biāo);dx1、dx2、dy1、dy2均為軌跡參數(shù)。
3.2 仿真參數(shù)設(shè)置
MPC傳統(tǒng)算法使用如表5所示的5個(gè)固定參數(shù),MPC多參數(shù)調(diào)節(jié)算法對(duì)這5個(gè)參數(shù)進(jìn)行實(shí)時(shí)優(yōu)化,MPC僅時(shí)域調(diào)節(jié)算法只優(yōu)化Np和Nc,MPC僅權(quán)重調(diào)節(jié)算法只優(yōu)化Qφ、QY和Rδ。Carsim中均使用B-Class車型,車輛參數(shù)如表6所示。

表5 模型預(yù)測(cè)控制器參數(shù)

表6 車輛主要參數(shù)
3.3 仿真結(jié)果評(píng)價(jià)
在高附著系數(shù)μ=0.8的路面上進(jìn)行36、54、72 km/h三種典型車速仿真實(shí)驗(yàn);在低附著系數(shù)μ=0.4的路面進(jìn)行54 km/h車速仿真實(shí)驗(yàn)。將使用改進(jìn)MPC控制器的車輛與傳統(tǒng)MPC控制器的車輛進(jìn)行仿真對(duì)比。
3.3.1 高附著路面仿真分析
1)橫向誤差對(duì)比。不同車速下軌跡如圖9所示,在X=53 m和85 m附近大曲率路徑處,采用MPC多參數(shù)優(yōu)化算法的控制器具有更高的跟蹤精度,采用其余3種算法的控制器都由于過早轉(zhuǎn)向?qū)е赂櫿`差較大。為了更清晰地觀察橫向軌跡誤差大小的變化,設(shè)置ΔY=Y(jié)ref-Y,如圖10所示,可以直觀地顯示橫向誤差的變化。

圖9 不同車速下軌跡曲線
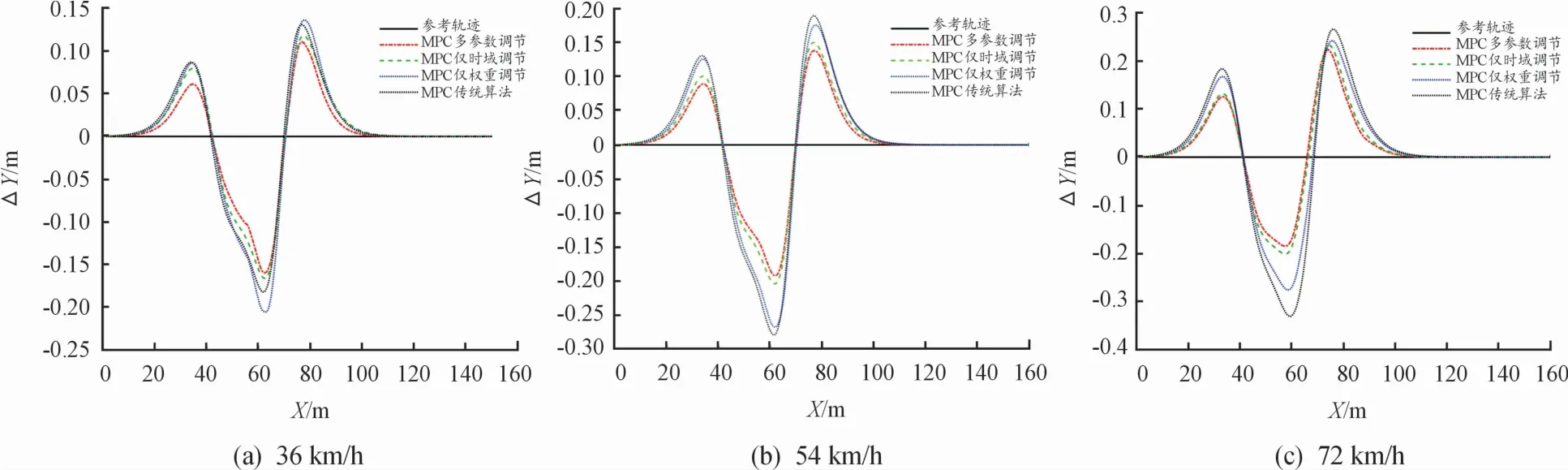
圖10 橫向誤差變化曲線
在測(cè)試的速度工況下,隨著速度提高,采用MPC多參數(shù)優(yōu)化算法的控制器在減小橫向誤差方面優(yōu)于采用MPC僅時(shí)域調(diào)節(jié)和僅權(quán)重調(diào)節(jié)的控制器,特別是在72 km/h工況下,MPC多參數(shù)優(yōu)化算法優(yōu)勢(shì)更加明顯。
對(duì)橫向誤差仿真結(jié)果進(jìn)行數(shù)據(jù)統(tǒng)計(jì),統(tǒng)計(jì)結(jié)果如表7所示,數(shù)據(jù)表明:在減小橫向誤差方面,不同速度工況下,采用MPC多參數(shù)優(yōu)化算法的控制器均表現(xiàn)最優(yōu),平均優(yōu)化比例可達(dá)27.4%。

表7 最大橫向誤差
2)橫擺角誤差對(duì)比。橫擺角誤差可以反映車輛行駛的穩(wěn)定性,為了清晰地觀察橫擺角誤差大小及誤差變化,設(shè)置Δφ=φref-φ,橫擺角誤差變化如圖11所示。在低速36 km/h時(shí),4種控制器的橫擺角誤差變化區(qū)別不明顯;在54 km/h時(shí),采用MPC多參數(shù)優(yōu)化算法控制器的車輛行駛過程中橫擺角誤差較小;在72 km/h時(shí),4種MPC控制器的車輛橫擺角誤差曲線都出現(xiàn)明顯波動(dòng),采用MPC多參數(shù)優(yōu)化算法控制器的車輛行駛過程中橫擺角波動(dòng)幅度較小。
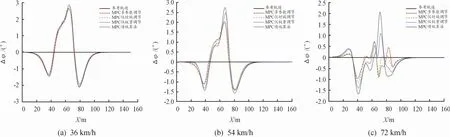
圖11 橫擺角誤差變化
對(duì)橫擺角誤差仿真結(jié)果進(jìn)行數(shù)據(jù)統(tǒng)計(jì),統(tǒng)計(jì)結(jié)果如表8所示,在減小最大橫擺角誤差方面,3種改進(jìn)算法都比傳統(tǒng)算法有優(yōu)勢(shì),采用MPC多參數(shù)優(yōu)化算法的控制器在減小最大橫擺角誤差方面表現(xiàn)最優(yōu),車輛行駛穩(wěn)定性最好,特別是72 km/h的時(shí)候,最大橫擺角誤差優(yōu)化明顯,誤差在1°以內(nèi)。

表8 最大橫擺角誤差
3)歐氏距離對(duì)比。為了能夠評(píng)價(jià)軌跡跟蹤全過程的整體誤差,基于歐式距離的相似度算法[15]對(duì)采用不同MPC控制器的車輛實(shí)際行駛軌跡與參考軌跡進(jìn)行對(duì)比。歐式距離模型如圖12所示,計(jì)算Ni和Mi兩點(diǎn)間的歐氏距離:

圖12 歐式距離模型
實(shí)際軌跡與參考軌跡的歐式距離可表示為:
歐氏距離綜合考慮軌跡的整體誤差,用于評(píng)價(jià)跟蹤效果更準(zhǔn)確,車輛在雙移線路徑行駛時(shí),跟蹤誤差主要分布在縱向位移0~100 m處,在此范圍內(nèi)均勻取點(diǎn)100個(gè),即式(19)中n=100。對(duì)歐氏距離計(jì)算結(jié)果進(jìn)行數(shù)據(jù)統(tǒng)計(jì),統(tǒng)計(jì)結(jié)果如表9所示,數(shù)據(jù)表明:采用MPC多參數(shù)優(yōu)化算法控制器的歐氏距離明顯低于其余3種控制器,平均優(yōu)化比例可達(dá)16.5%。

表9 歐氏距離
3.3.2 低附著路面仿真分析
為了驗(yàn)證多參數(shù)優(yōu)化MPC控制器在低附著路面工況下的優(yōu)勢(shì),選取附著系數(shù)μ=0.4,車速為54 km/h進(jìn)行仿真實(shí)驗(yàn)。低附著路面仿真結(jié)果如圖13所示,將仿真結(jié)果進(jìn)行數(shù)據(jù)統(tǒng)計(jì),統(tǒng)計(jì)結(jié)果如表10—表12所示。仿真結(jié)果表明:與其余3種控制算法相比,采用MPC多參數(shù)優(yōu)化算法控制器的車輛行駛軌跡更接近參考軌跡,且橫擺角誤差波動(dòng)較小,在低附著路面工況下具有良好的操縱穩(wěn)定性;采用僅時(shí)域優(yōu)化算法的MPC控制器由于過度減小最大橫向誤差,導(dǎo)致軌跡在X=85 m附近出現(xiàn)明顯波動(dòng),且橫擺角誤差在X=90 m附近出現(xiàn)明顯波動(dòng),操縱穩(wěn)定性較差。采用MPC多參數(shù)優(yōu)化算法控制器的車輛行駛軌跡具有更小的歐氏距離,軌跡跟蹤整體誤差減小。
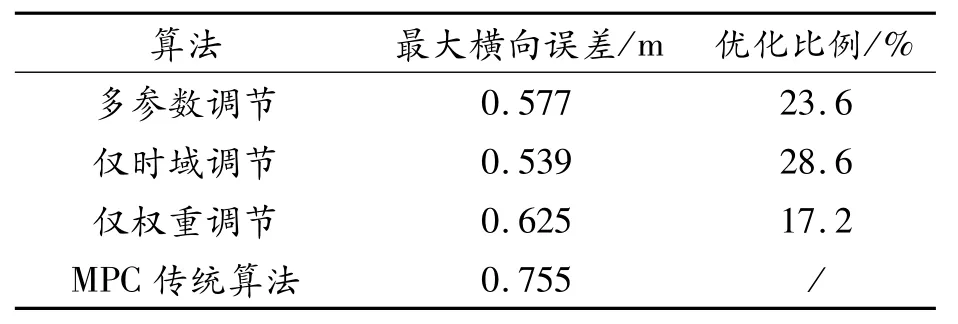
表10 最大橫向誤差

表11 最大橫擺角誤差

表12 歐氏距離
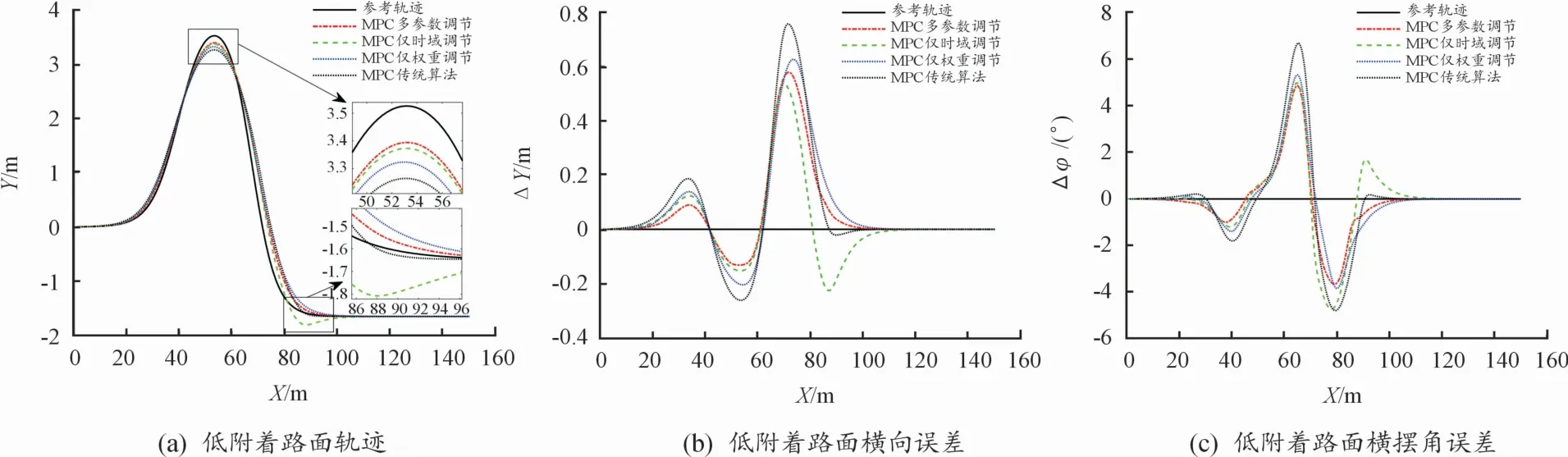
圖13 低附著路面仿真結(jié)果
4 結(jié)論
1)針對(duì)自動(dòng)駕駛車輛橫向控制在大曲率路徑處跟蹤誤差較大的問題,提出了多參數(shù)優(yōu)化MPC的自動(dòng)駕駛軌跡跟蹤控制策略,進(jìn)行了仿真驗(yàn)證。
2)采用MPC多參數(shù)優(yōu)化算法的控制器在高附著路面,能夠更好地減小最大橫向誤差,提高跟蹤精度,保持良好的操縱穩(wěn)定性,在車速72 km/h雙移線工況下將最大橫擺角誤差控制在1°以內(nèi)。
3)采用MPC多參數(shù)優(yōu)化算法的控制器在低附著路面,能夠更好地平衡跟蹤精度與操縱穩(wěn)定性,避免因提高跟蹤精度而降低操縱穩(wěn)定性,在車速為54 km/h工況下,比MPC傳統(tǒng)算法的最大橫擺角誤差減小27.3%。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
 重慶理工大學(xué)學(xué)報(bào)(自然科學(xué))2024年2期
重慶理工大學(xué)學(xué)報(bào)(自然科學(xué))2024年2期
- 重慶理工大學(xué)學(xué)報(bào)(自然科學(xué))的其它文章
- 對(duì)稱五對(duì)角矩陣加箭型矩陣的廣義逆譜問題
- 離散時(shí)間平均場(chǎng)隨機(jī)系統(tǒng)的滾動(dòng)時(shí)域控制
- 一類拋物型方程初值與源項(xiàng)同時(shí)反演問題的唯一性與數(shù)值計(jì)算
- 成渝雙城經(jīng)濟(jì)圈高質(zhì)量發(fā)展質(zhì)量及協(xié)調(diào)性研究
- Pt摻雜CeO2 對(duì)磷酸鐵鋰電池?zé)崾Э靥卣鳉怏wCO的吸附與傳感機(jī)理研究
- 風(fēng)光儲(chǔ)聯(lián)合發(fā)電系統(tǒng)并網(wǎng)控制研究